展开查看详情
1 . 基于英特尔oneAPI
双目立体匹配算法并发性改造实践
高云龙 博士 研发总监
2021年11月10日
�
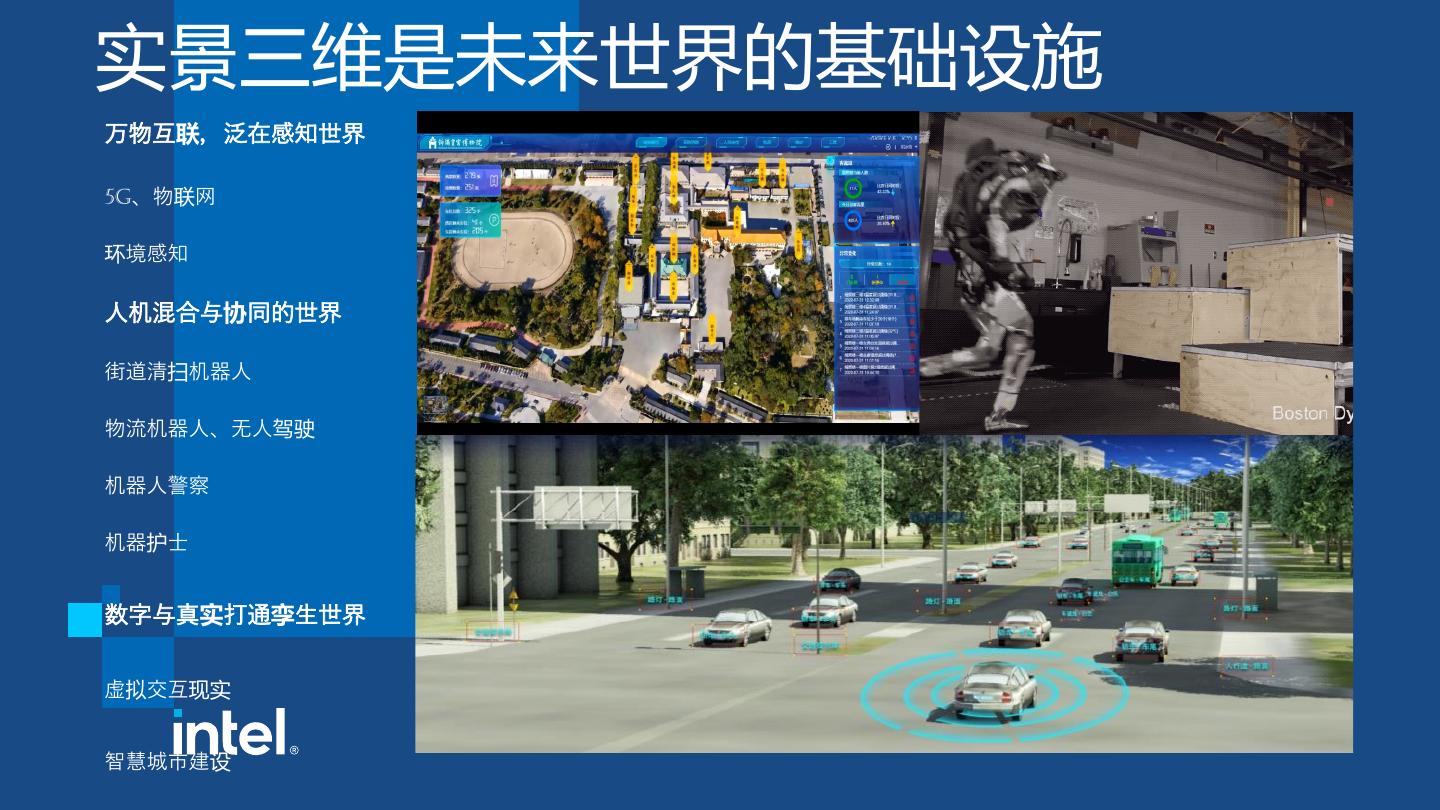
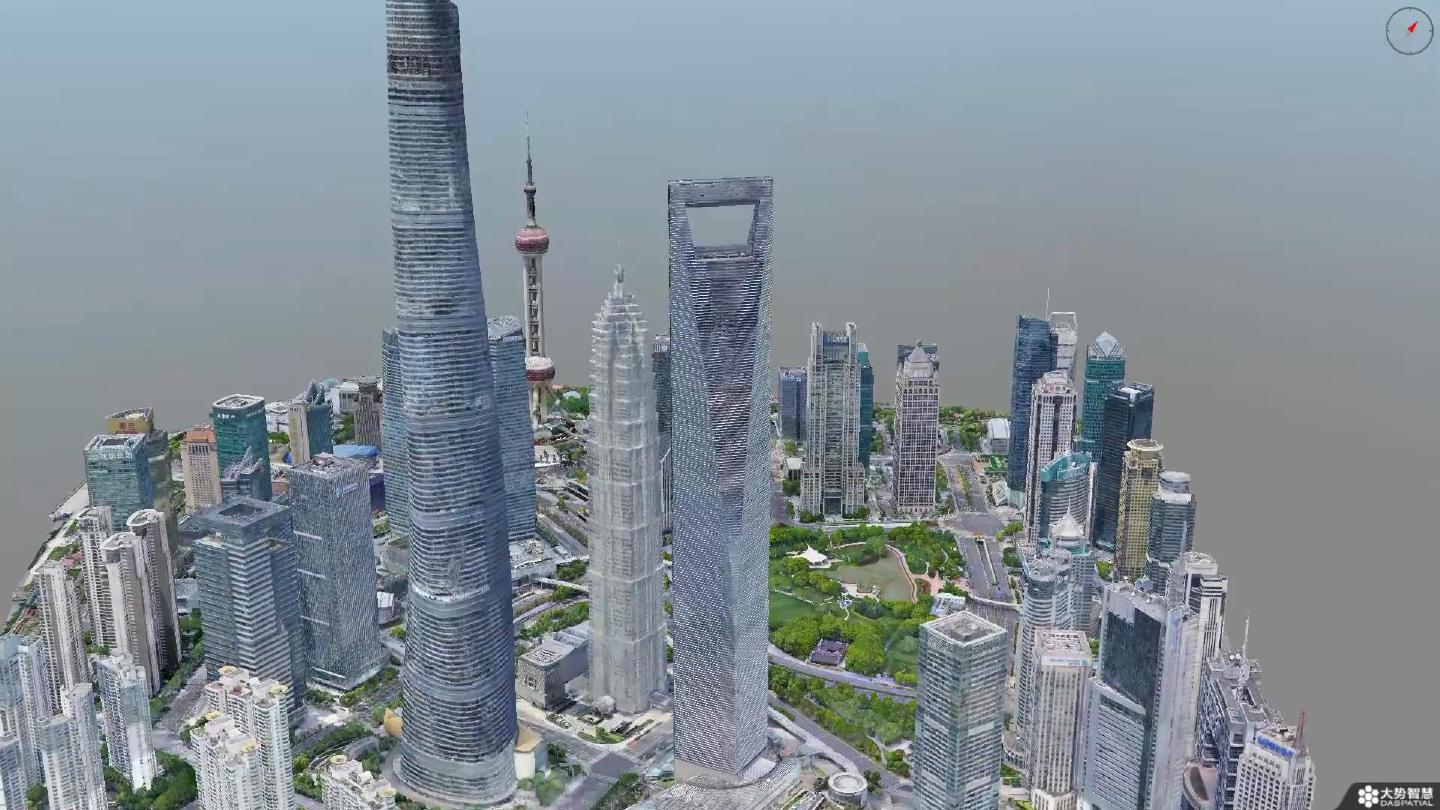
2 .实景三维是未来世界的基础设施
万物互联,泛在感知世界
5G、物联网
环境感知
人机混合与协同的世界
街道清扫机器人
物流机器人、无人驾驶
机器人警察
机器护士
数字与真实打通孪生世界
虚拟交互现实
智慧城市建设
�
7 .大规模场景的算法与算力需求
智慧坪山案例 计算服务器(100台)
166平方公里,3cm分辨率 intel i7 8700K 三个月
约100万张图像(2400万像素) 64GB内存
�
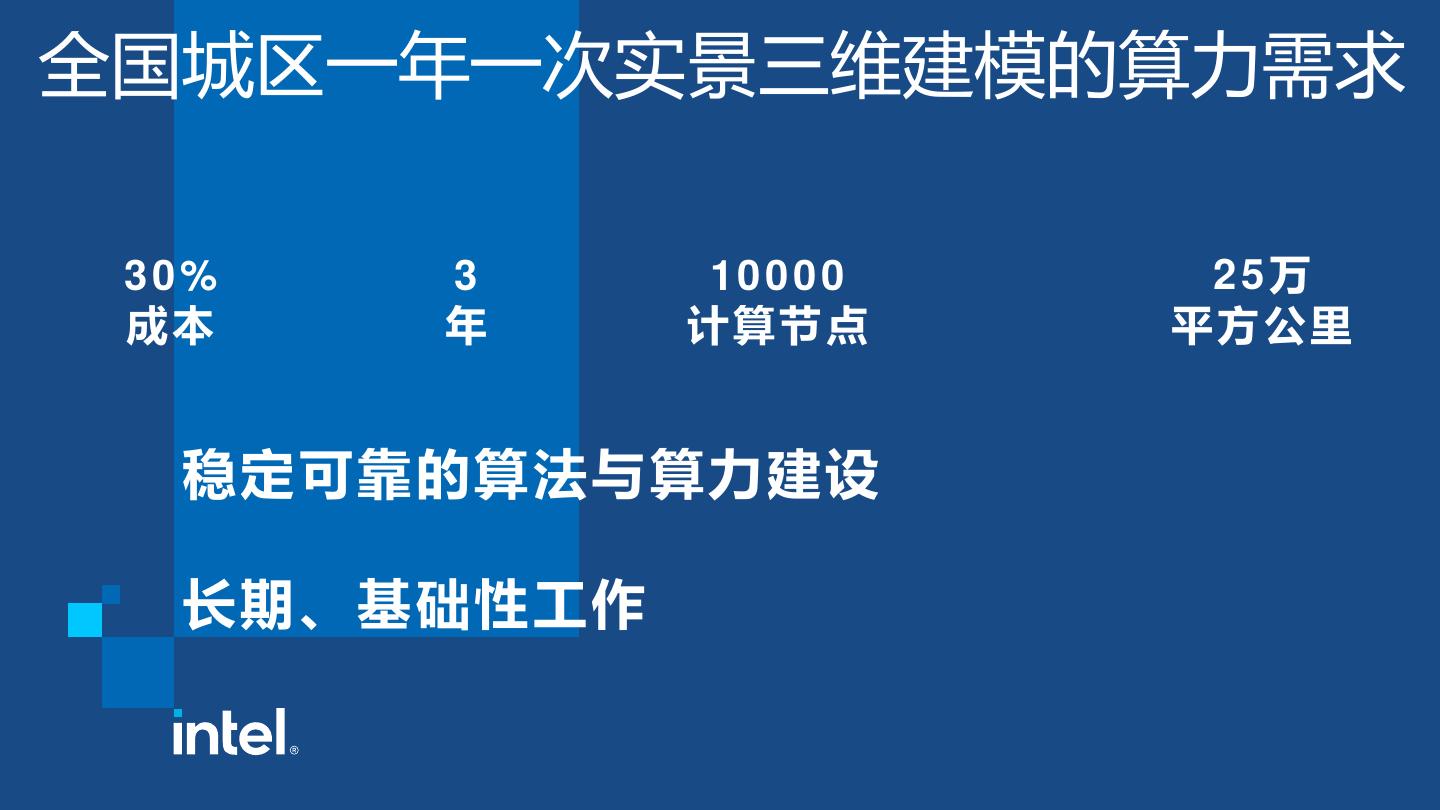
8 .全国城区一年一次实景三维建模的算力需求
30% 3 10000 25万
成本 年 计算节点 平方公里
稳定可靠的算法与算力建设
长期、基础性工作
�
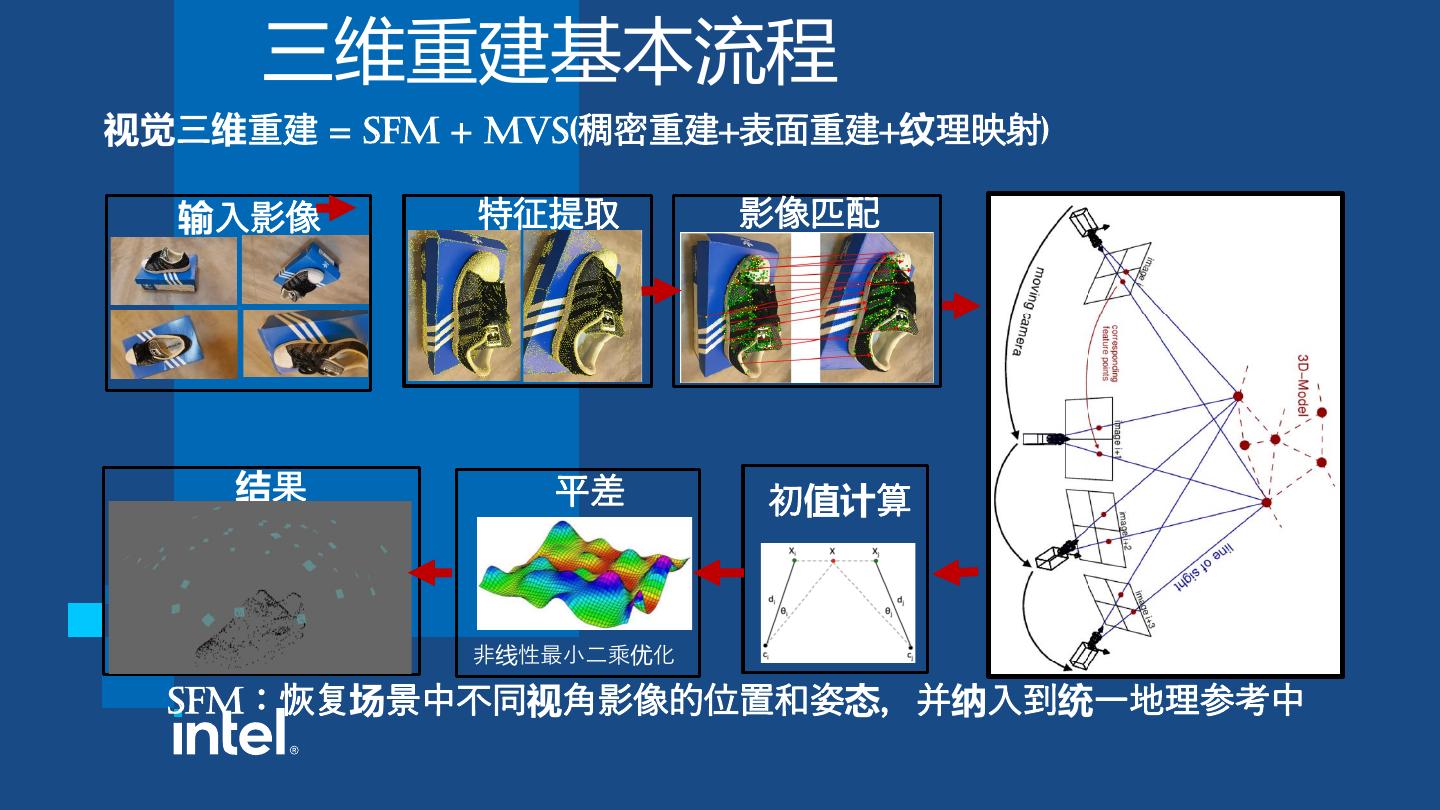
9 . 三维重建基本流程
视觉三维重建 = SFM + MVS(稠密重建+表面重建+纹理映射)
输入影像 特征提取 影像匹配
结果 平差 初值计算
非线性最小二乘优化
SFM:恢复场景中不同视角影像的位置和姿态,并纳入到统一地理参考中
�
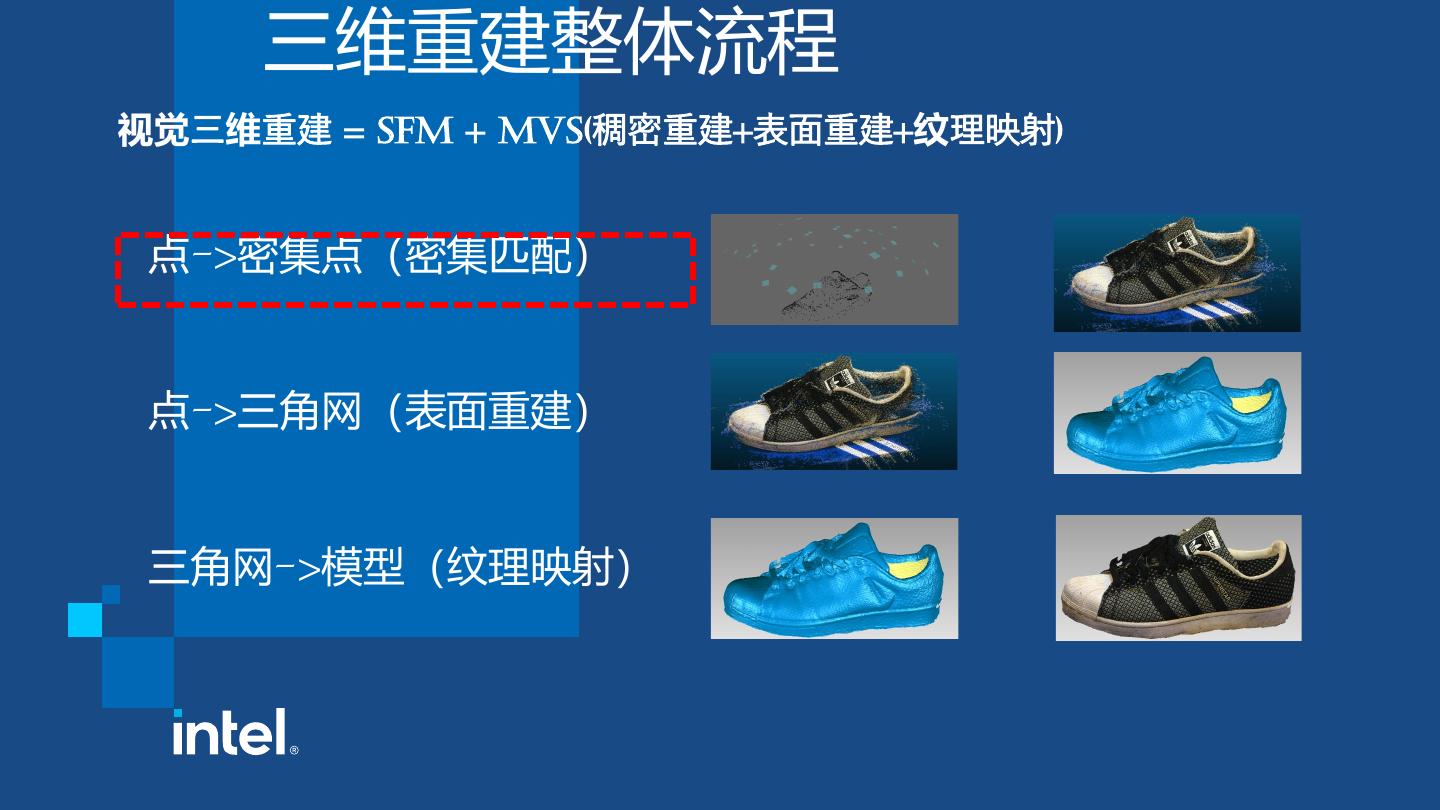
10 . 三维重建整体流程
视觉三维重建 = SFM + MVS(稠密重建+表面重建+纹理映射)
点->密集点(密集匹配)
点->三角网(表面重建)
三角网->模型(纹理映射)
�
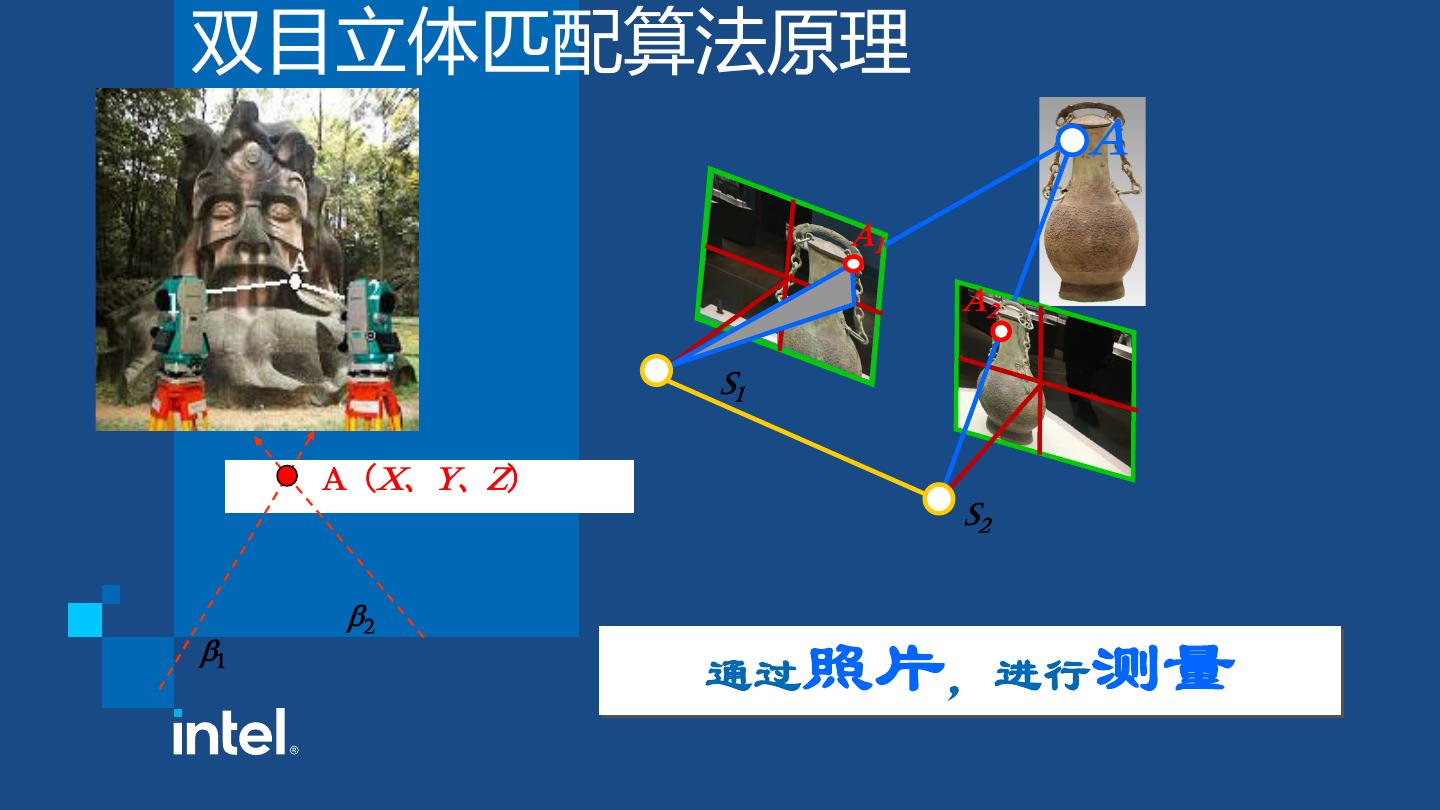
11 .双目立体匹配算法原理
A
a1
a2
S1
A(X、Y、Z)
S2
2
通过照片,进行测量
1
�
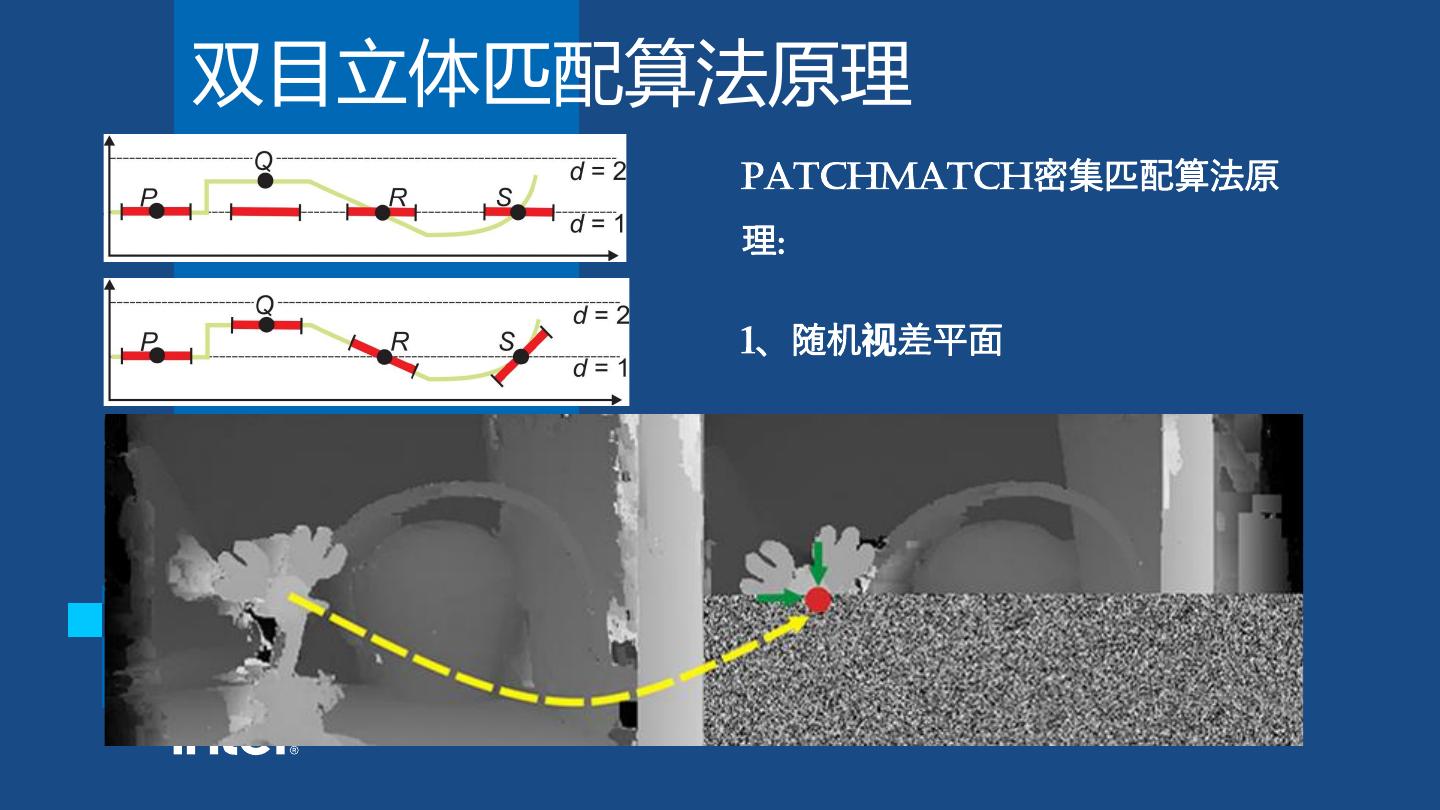
12 .双目立体匹配算法原理
PatchMatch密集匹配算法原
理:
1、随机视差平面
2、视差平面传递
空间传递、视图传递
�
13 .双目立体匹配
1、视差信息初始化
2、初始匹配代价计算
3、视差信息传递
空间传递、视图传递、视差平面优化
4、视差图后处理
左右一致性检查、无效视差填充、视差图滤波
[1] Bleyer M , Rhemann C , Rother C . PatchMatch Stereo - Stereo Matching with Slanted
Support Windows[C]. British Machine Vision Conference 2011. 2011.
�
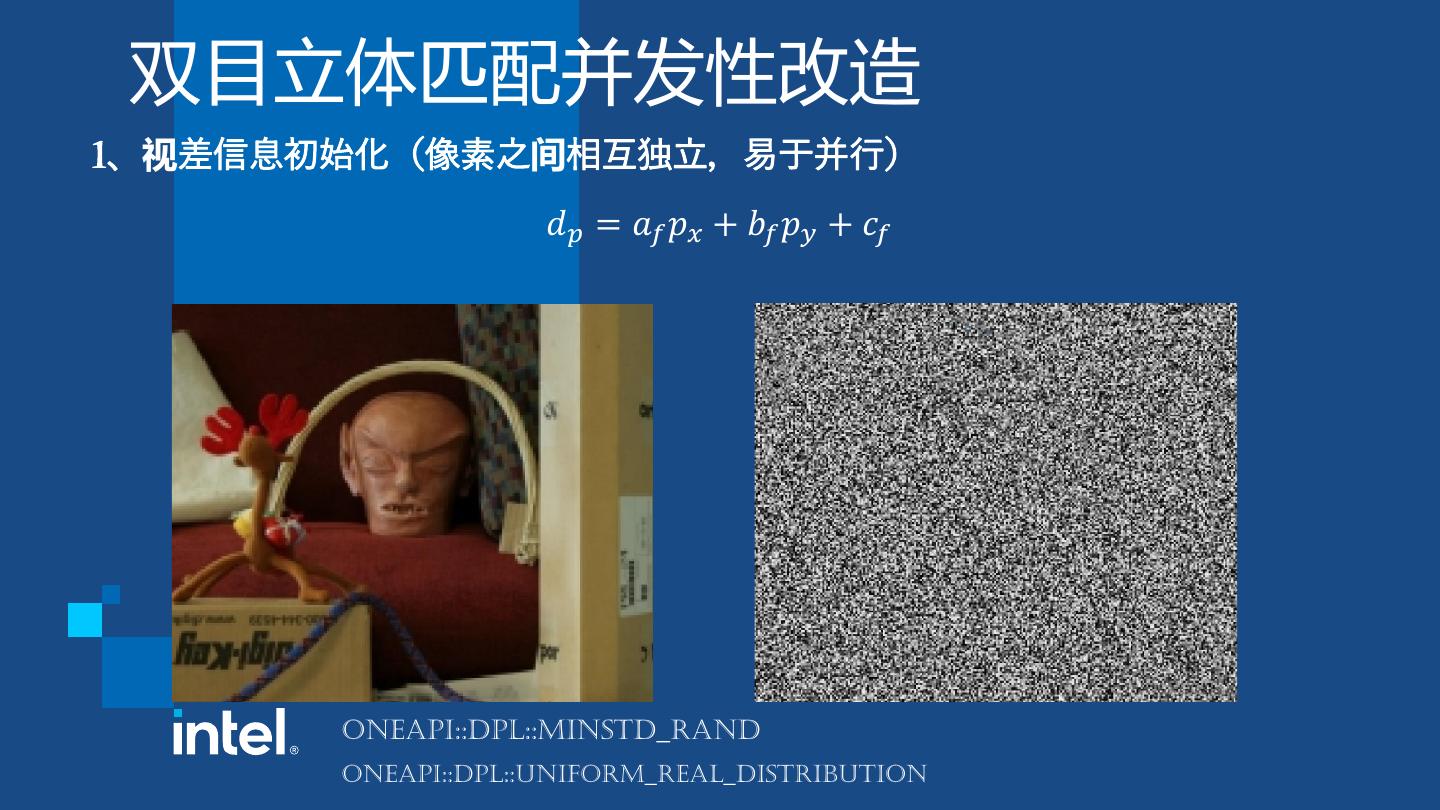
14 . 双目立体匹配并发性改造
1、视差信息初始化(像素之间相互独立,易于并行)
𝑑𝑝 = 𝑎𝑓 𝑝𝑥 + 𝑏𝑓 𝑝𝑦 + 𝑐𝑓
oneapi::dpl::minstd_rand
oneapi::dpl::uniform_real_distribution
�
15 . 双目立体匹配
2、初始匹配代价计算(像素之间相互
独立,易于并行)
NCC
相似性测度:𝑐 𝑝, 𝑝′ = 1 − 𝛼 ∙ min 𝐼𝑝 − 𝐼𝑝′ , 𝜏𝑐𝑜𝑙 + α ∙ min( 𝛻𝐼𝑝 − 𝛻𝐼𝑝′ , 𝜏𝑔𝑟𝑎𝑑 )
𝐼𝑝 −𝐼𝑞
−
匹配代价聚合:𝑚 𝑝, 𝑓 = σ𝑞∈𝑊𝑝 𝑤(𝑝, 𝑞) ∙ 𝑐(𝑞, 𝑞 − 𝑑𝑞 ) , 𝑤 𝑝, 𝑞 = 𝑒 𝛾
�
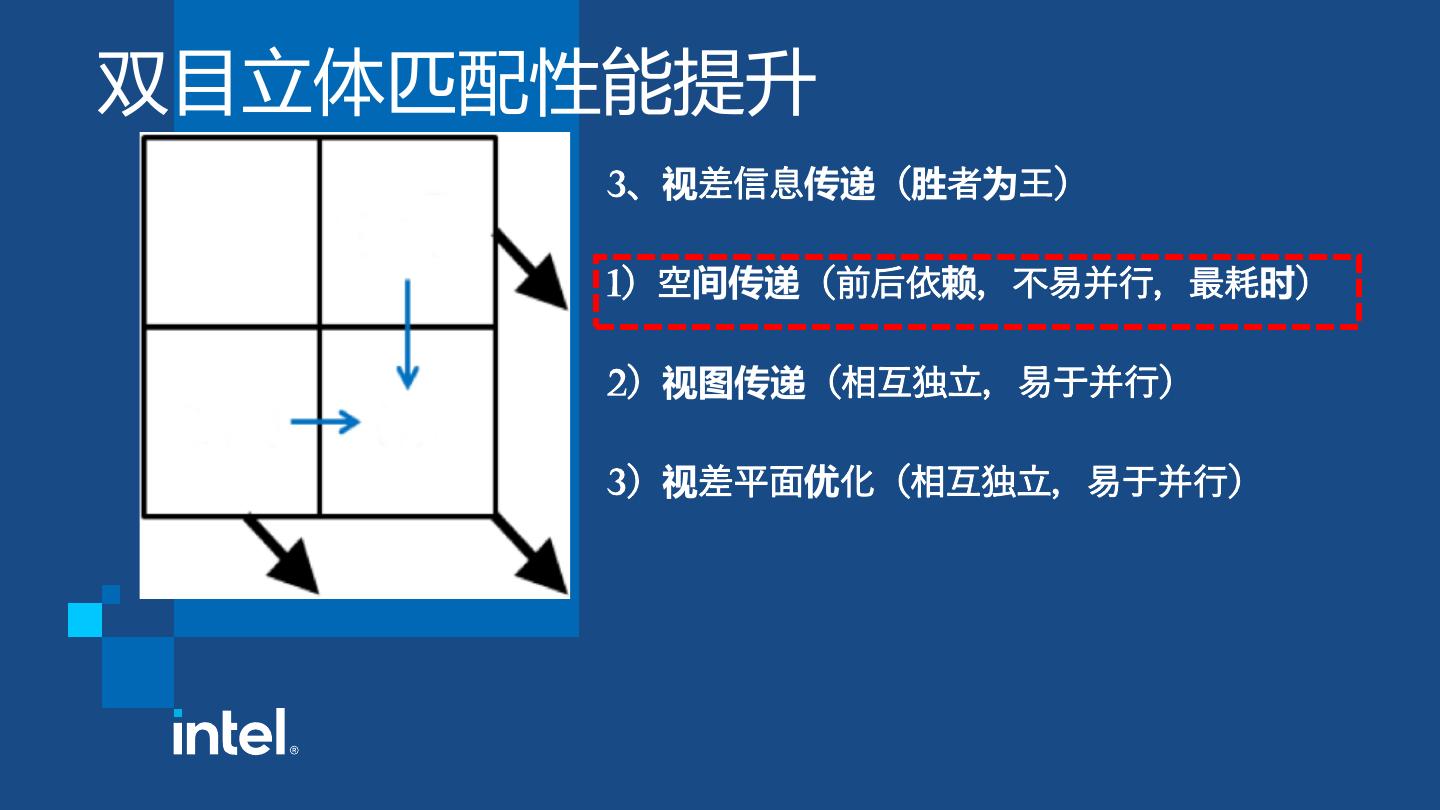
16 .双目立体匹配性能提升
3、视差信息传递(胜者为王)
1)空间传递(前后依赖,不易并行,最耗时)
2)视图传递(相互独立,易于并行)
3)视差平面优化(相互独立,易于并行)
�
17 .双目立体匹配性能提升
Cost
(1,1) (1,2) (1,3)
(2,1) (2,2) (2,3)
视差平面
�
18 .双目立体匹配性能提升
4、视差图后处理(像素之间相互独立,易于并行)
1) 左右一致性检查
2) 无效视差填充
3) 视差图滤波
�
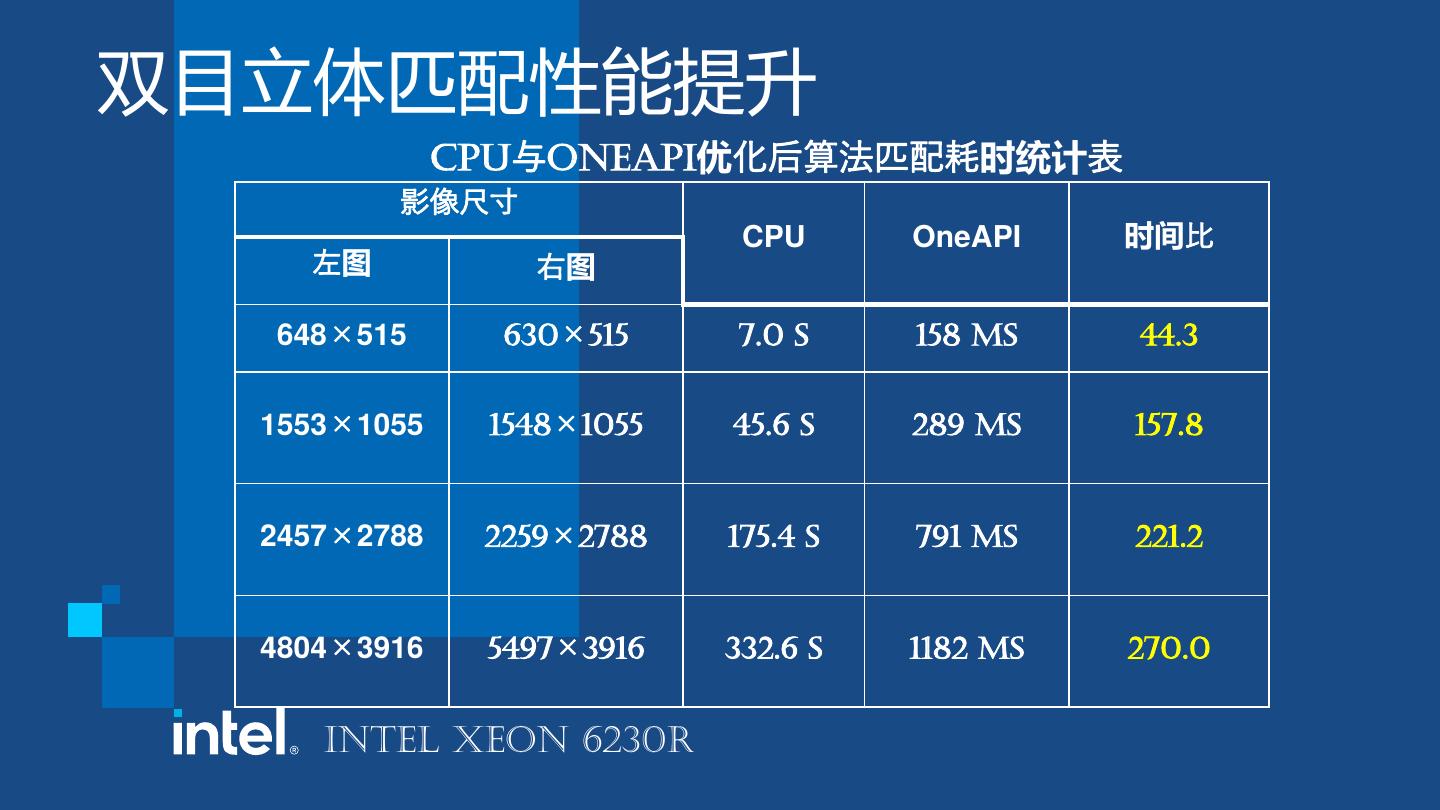
19 .双目立体匹配性能提升
CPU与OneAPI优化后算法匹配耗时统计表
影像尺寸
CPU OneAPI 时间比
左图 右图
648×515 630×515 7.0 s 158 ms 44.3
1553×1055 1548×1055 45.6 s 289 ms 157.8
2457×2788 2259×2788 175.4 s 791 ms 221.2
4804×3916 5497×3916 332.6 s 1182 ms 270.0
Intel xeon 6230R
�
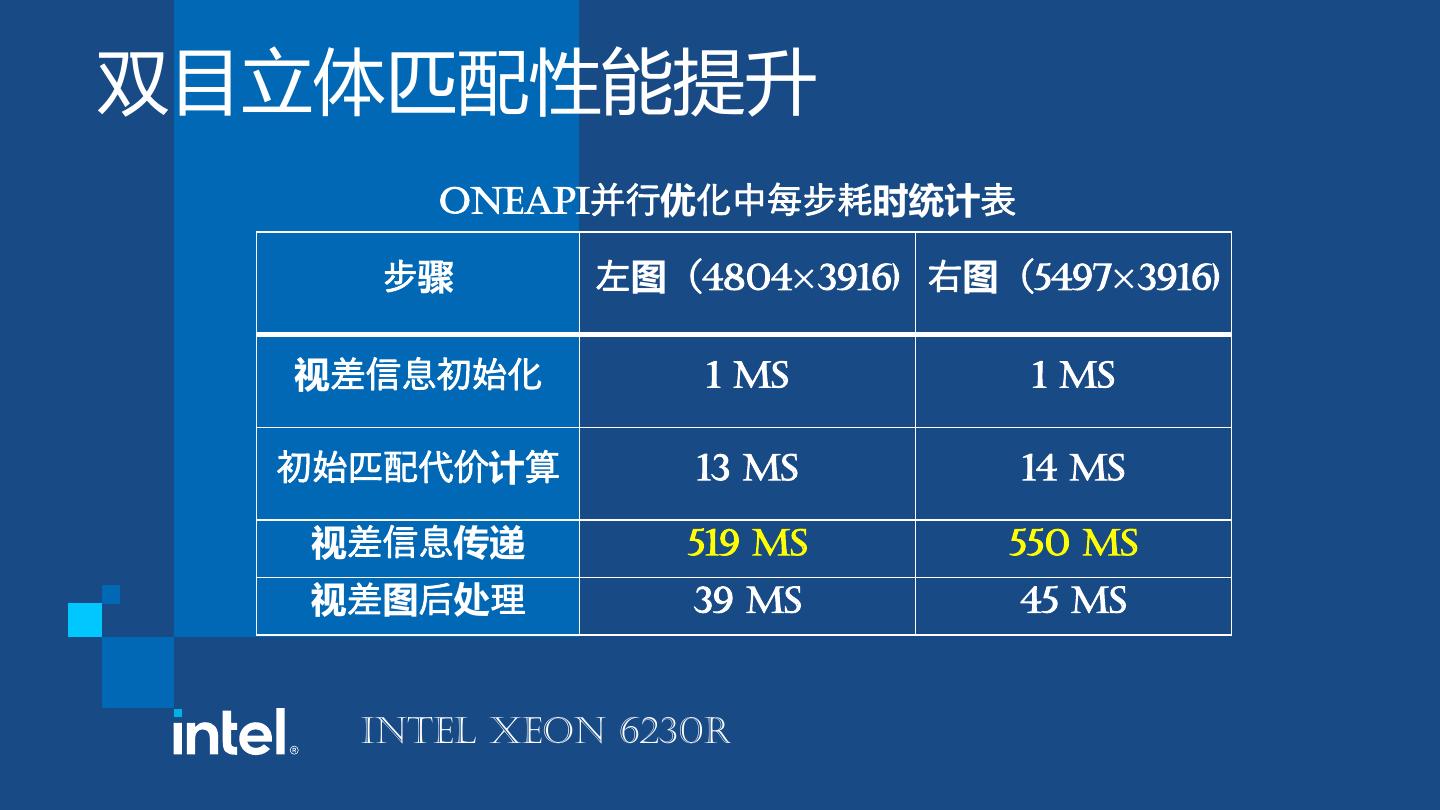
20 .双目立体匹配性能提升
OneAPI并行优化中每步耗时统计表
步骤 左图(4804×3916) 右图(5497×3916)
视差信息初始化 1 ms 1 ms
初始匹配代价计算 13 ms 14 ms
视差信息传递 519 ms 550 ms
视差图后处理 39 ms 45 ms
Intel xeon 6230R
�
21 .简单总结
1)算法复杂度
2)并行化方法
3)硬件特性
�
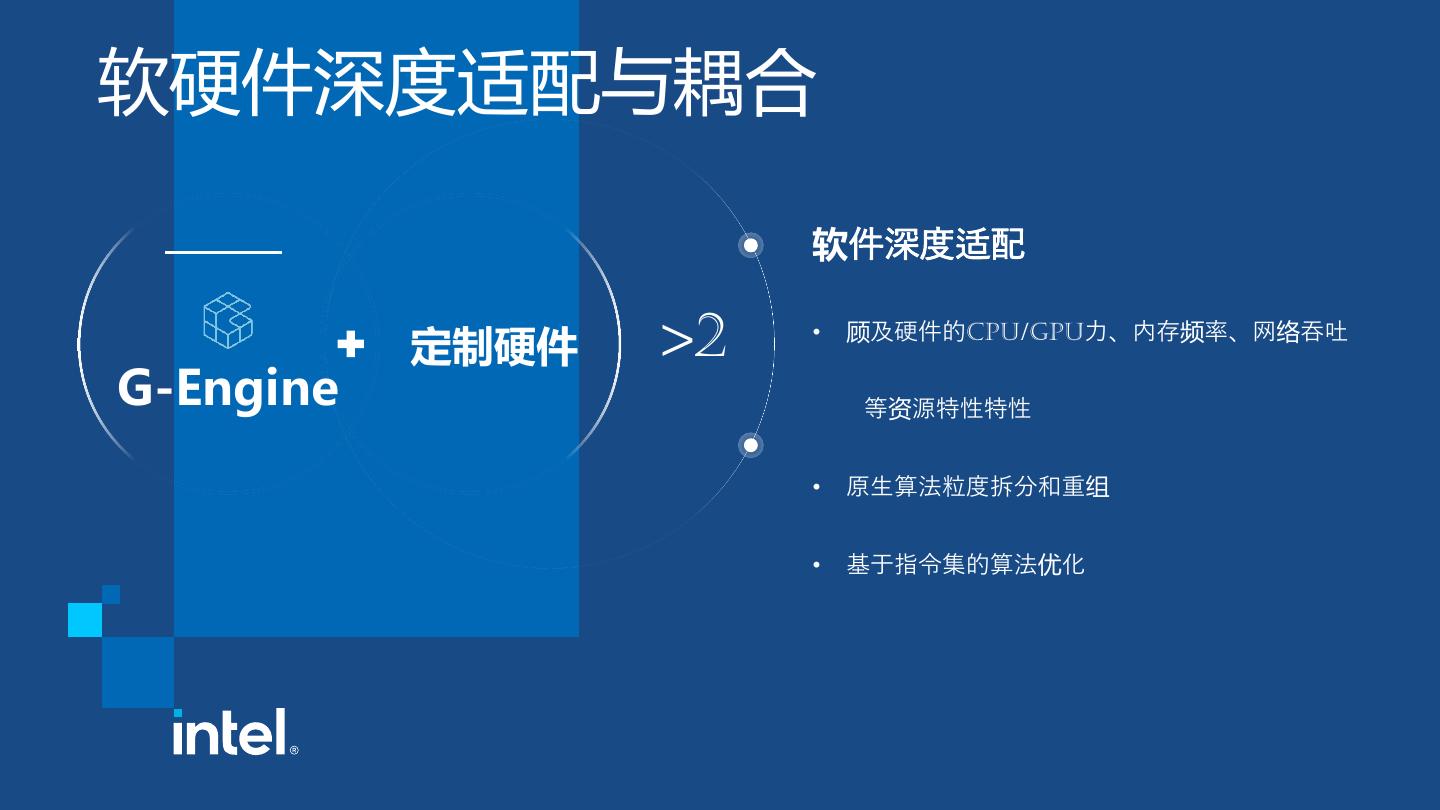
23 .软硬件深度适配与耦合
软件深度适配
定制硬件 >2 • 顾及硬件的CPU/GPU力、内存频率、网络吞吐
G-Engine 等资源特性特性
• 原生算法粒度拆分和重组
• 基于指令集的算法优化
�
24 .三维重建整体流程算法效率提高5.8倍
基于 Intel® C++ Compiler & Intel®
Integrated Performance
Primitives (IPP) 优化, 整体提高 5.8倍
CUDA 英伟达 T4 显卡
特征点匹配效率提高 9.4倍 AI
影像增强
Tensorflow
基于 Intel optimized
Tensorflow* 提高AI推理效率 3D 查找表影像增强
9.4倍。
AI
Cuda 英伟达 T4 9倍
三维点类别推理效率提高9倍 特征提取 Tensorflow 提速
基于 Intel optimized
Tensorflow*提高物方点类别 影像特征点提取
推理效率9倍。
CUDA 英伟达 T4
Tensorflow
AI
类别推理 地物点分类
Intel xeon 6230R
�
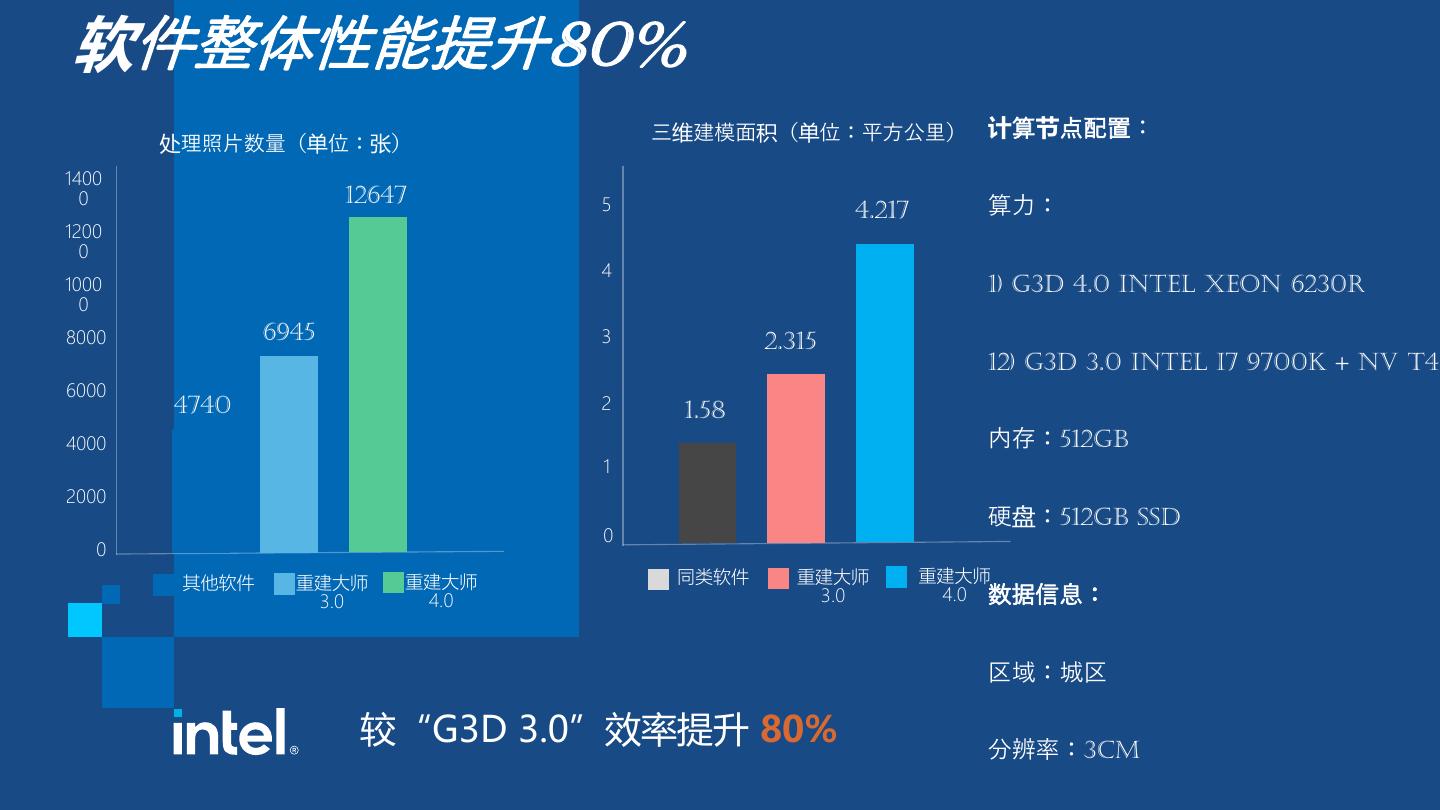
25 .软件整体性能提升80%
三维建模面积(单位:平方公里) 计算节点配置:
处理照片数量(单位:张)
1400
0 12647 5 算力:
4.217
1200
0
4
1000 1) G3D 4.0 Intel xeon 6230R
0
8000 6945 3 2.315
12) G3D 3.0 Intel i7 9700K + NV T4
6000
4740 2 1.58
4000 内存:512GB
1
2000
硬盘:512GB SSD
0
0
其他软件 重建大师 重建大师 同类软件 重建大师 重建大师
3.0 4.0 3.0 4.0 数据信息:
区域:城区
较“G3D 3.0”效率提升 80% 分辨率:3cm
�