基于IPv6校园环境车辆行驶行为建模与分析
分享
点赞
1
收藏
0
下载 0
-
快召唤伙伴们来围观吧
-
微博
QQ
QQ空间
贴吧
-
文档嵌入链接
- 复制
-
-
微信扫一扫分享
-
已成功复制到剪贴板
 浅色棱
浅色棱
/
发布于
/
2150
人观看
... 测试了5类不同的机器学习算法,分别是:支持向量机(C-SVC)、邻近算法(IBK)、决策树算法(J48)、规则归纳学习(JRip)和朴素贝叶斯分类器(Naïve Bayes)。
展开查看详情
1 .基于 IPv6 校园环境车辆行驶行为建模与分
析
欧阳真超,齐之平,赵晓轲,牛建伟
北京航空航天大学
�
2 .背景介绍
系统架构
车辆行驶检测模型
实验分析
总结
�
3 .背景介绍—项目场景和目标
• 研究场所:校园环境
• 网络环境: IPv4/6 无线网络全覆盖
• 研究目标:车辆行驶数据采集与建模
• 研究工具:基于 Android 的移动平台
通过移动终端设备内部的多项传感器捕获车
辆的行驶数据,结合众包数据采集方案收集
海量数据,结合机器学习算法构建车辆驾驶
行为识别检测模型
�
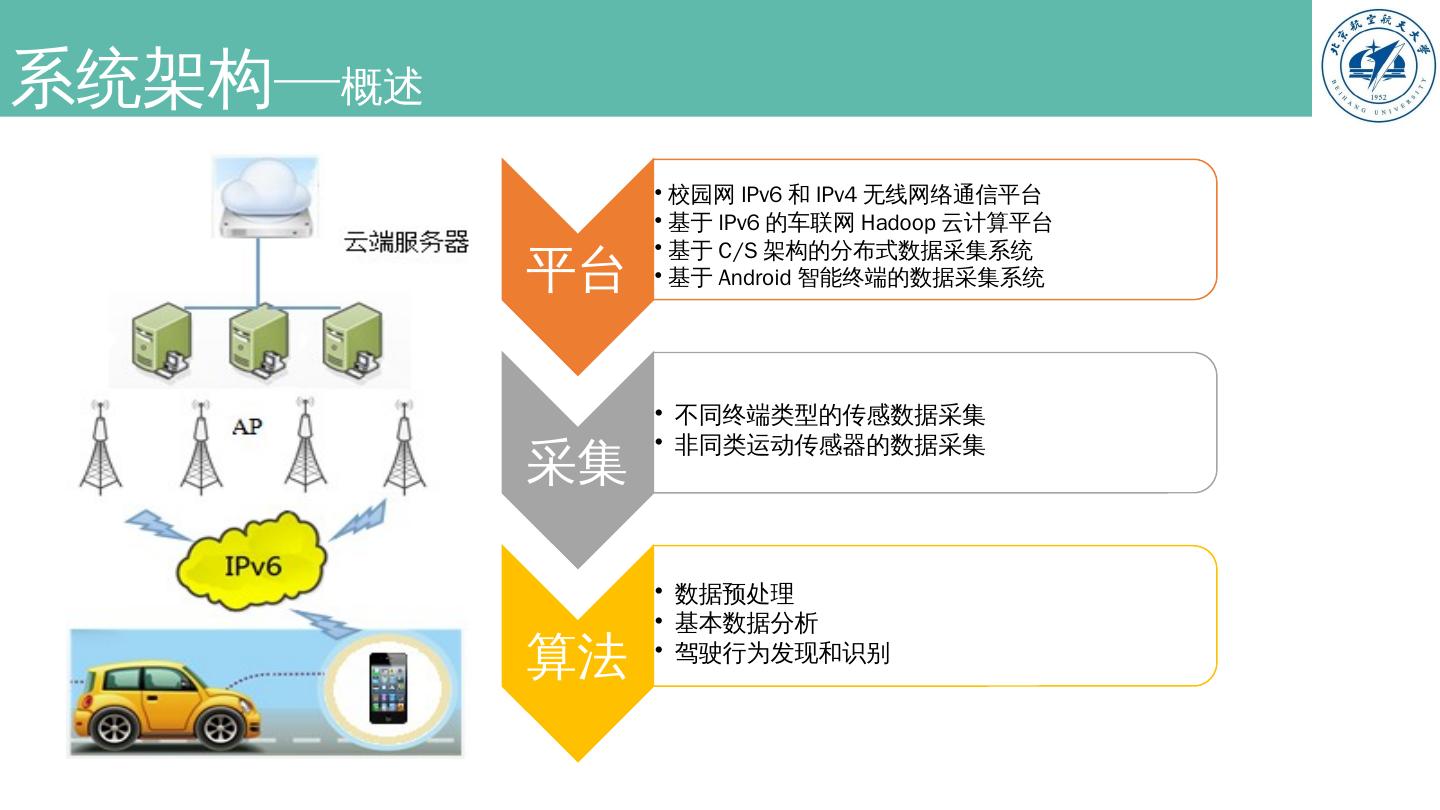
4 .系统架构—概述
• 校园网 IPv6 和 IPv4 无线网络通信平台
• 基于 IPv6 的车联网 Hadoop 云计算平台
• 基于 C/S 架构的分布式数据采集系统
平台 • 基于 Android 智能终端的数据采集系统
• 不同终端类型的传感数据采集
• 非同类运动传感器的数据采集
采集
• 数据预处理
• 基本数据分析
算法 • 驾驶行为发现和识别
�
5 .系统架构—云计算平台
挖掘分析 交互接口 数据获取
Apache
Hadoop MySQL
Tomcat
Ubuntu Server
主要功能:
1. 与智能移动终端进行数据交互
2. 利用机器学习方法对增长数据进行挖掘
3. 通过 Web 显示数据采集情况
�
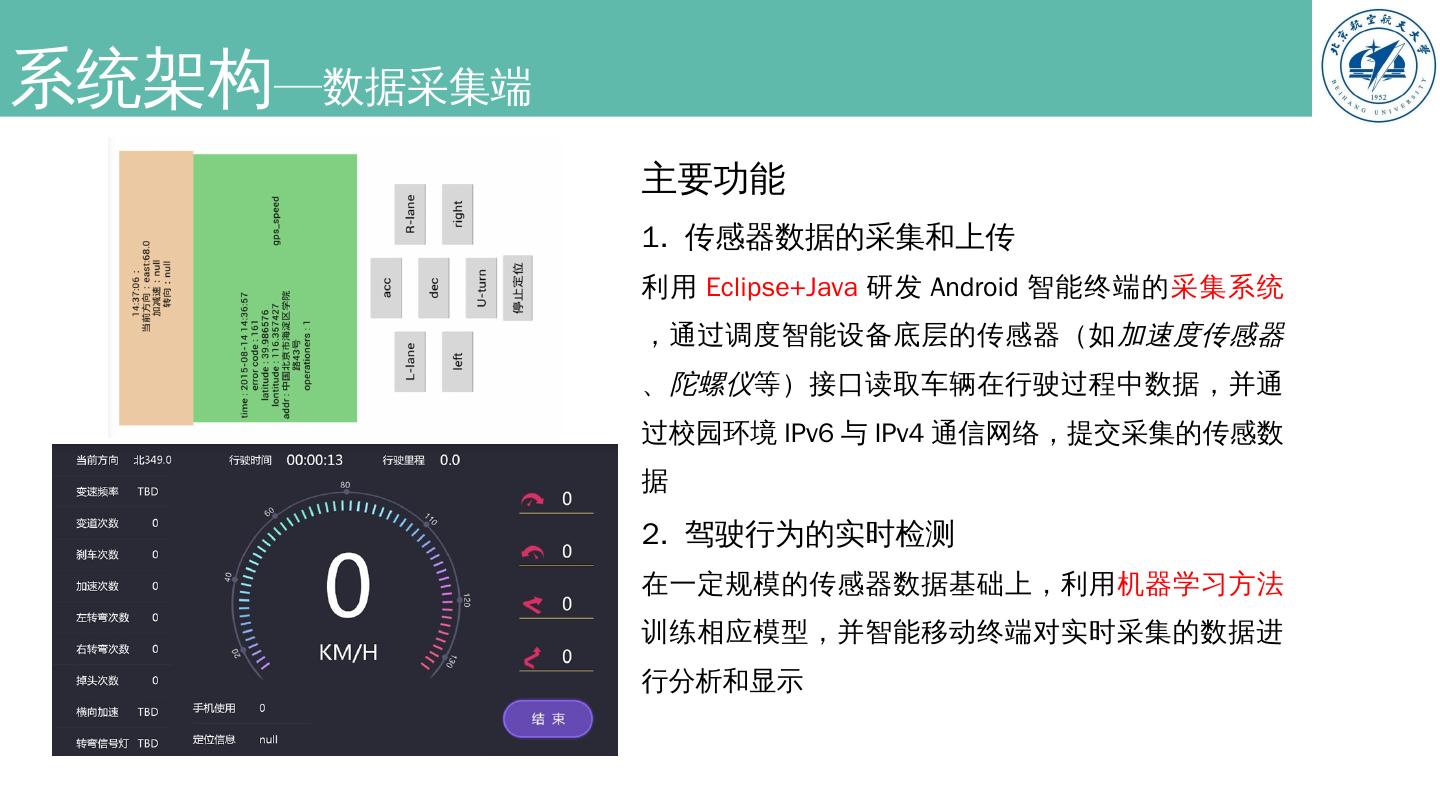
6 .系统架构—数据采集端
主要功能
1. 传感器数据的采集和上传
利用 Eclipse+Java 研发 Android 智能终端的采集系统
,通过调度智能设备底层的传感器(如 加速度传感器
、 陀螺仪 等)接口读取车辆在行驶过程中数据,并通
过校园环境 IPv6 与 IPv4 通信网络,提交采集的传感数
据
2. 驾驶行为的实时检测
在一定规模的传感器数据基础上,利用机器学习方法
训练相应模型,并智能移动终端对实时采集的数据进
行分析和显示
�
7 .系统架构—传感器数据定性分析
传感器类型 位置敏感 方向敏感 功能
加速度计 否 是 加速度
陀螺仪 否 是 角速度
磁力计 否 是 方向
GPS 否 否 位置、速度
重力计 否 是 重力
摄像头 是 是 图像
光感传感器 是 是 光强
• 选择加速度计和陀螺仪两种惯性传感器的反馈数据进行采集
• 对 5 种常见行驶行为进行采集:左 / 右转向、左 / 右变道和
掉头
�
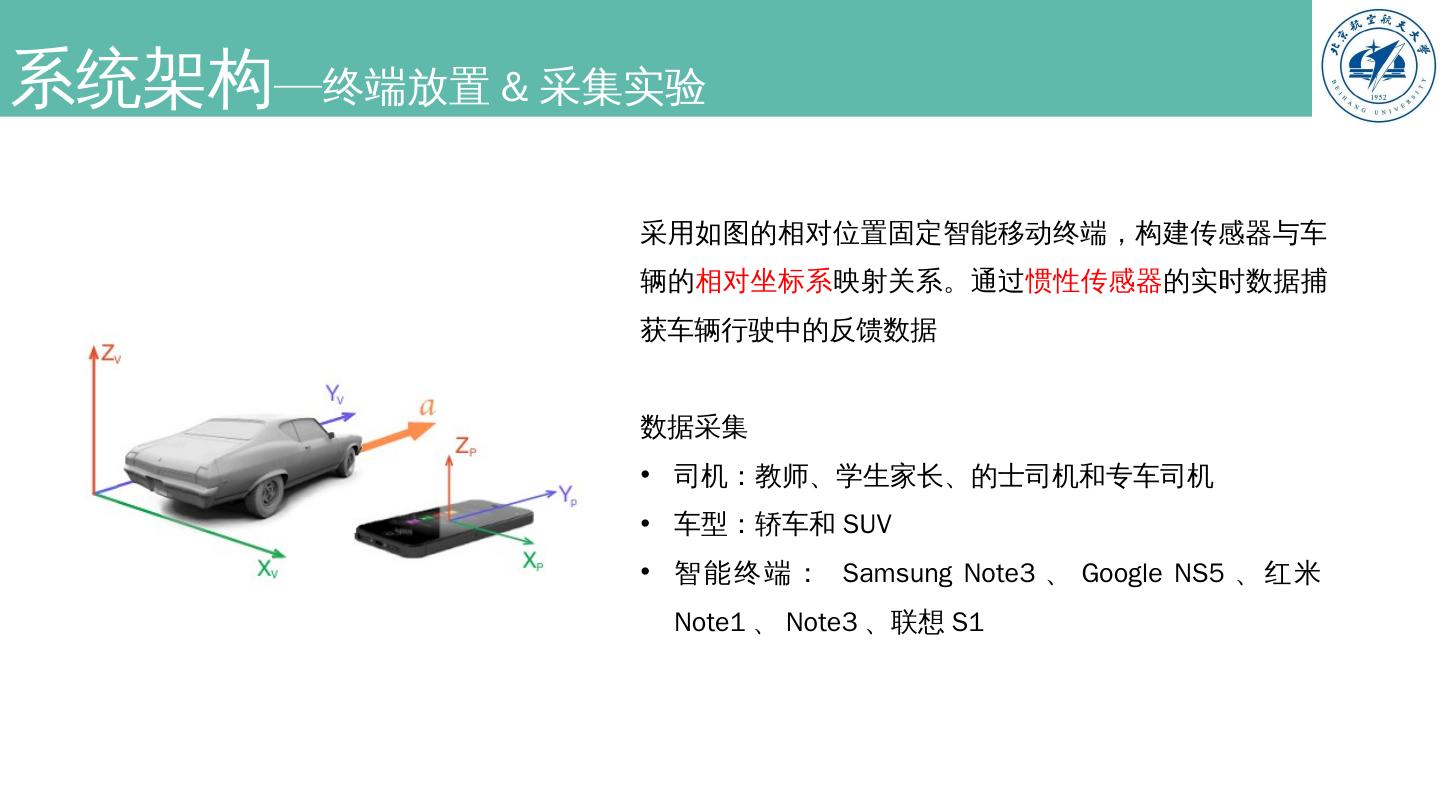
8 .系统架构—终端放置 & 采集实验
采用如图的相对位置固定智能移动终端,构建传感器与车
辆的相对坐标系映射关系。通过惯性传感器的实时数据捕
获车辆行驶中的反馈数据
数据采集
• 司机:教师、学生家长、的士司机和专车司机
• 车型:轿车和 SUV
• 智 能 终 端 : Samsung Note3 、 Google NS5 、 红 米
Note1 、 Note3 、联想 S1
�
9 .车辆行驶检测模型—特征集
利用检测的识别算法 MultiWave ,能够有
效的过滤原始传感器的噪声数据,并能够
比传统的滑动窗口更为有效的捕获车辆的
五种行驶事件。
针对车辆行驶过程中产生的波形发生区间
内数据,提出了一个 8 维统计特征参数集
: { 最大值、最小值、均值、方差、标准
差、上四分位数、下四分位数、信息
熵 } ,作为训练输入。
�
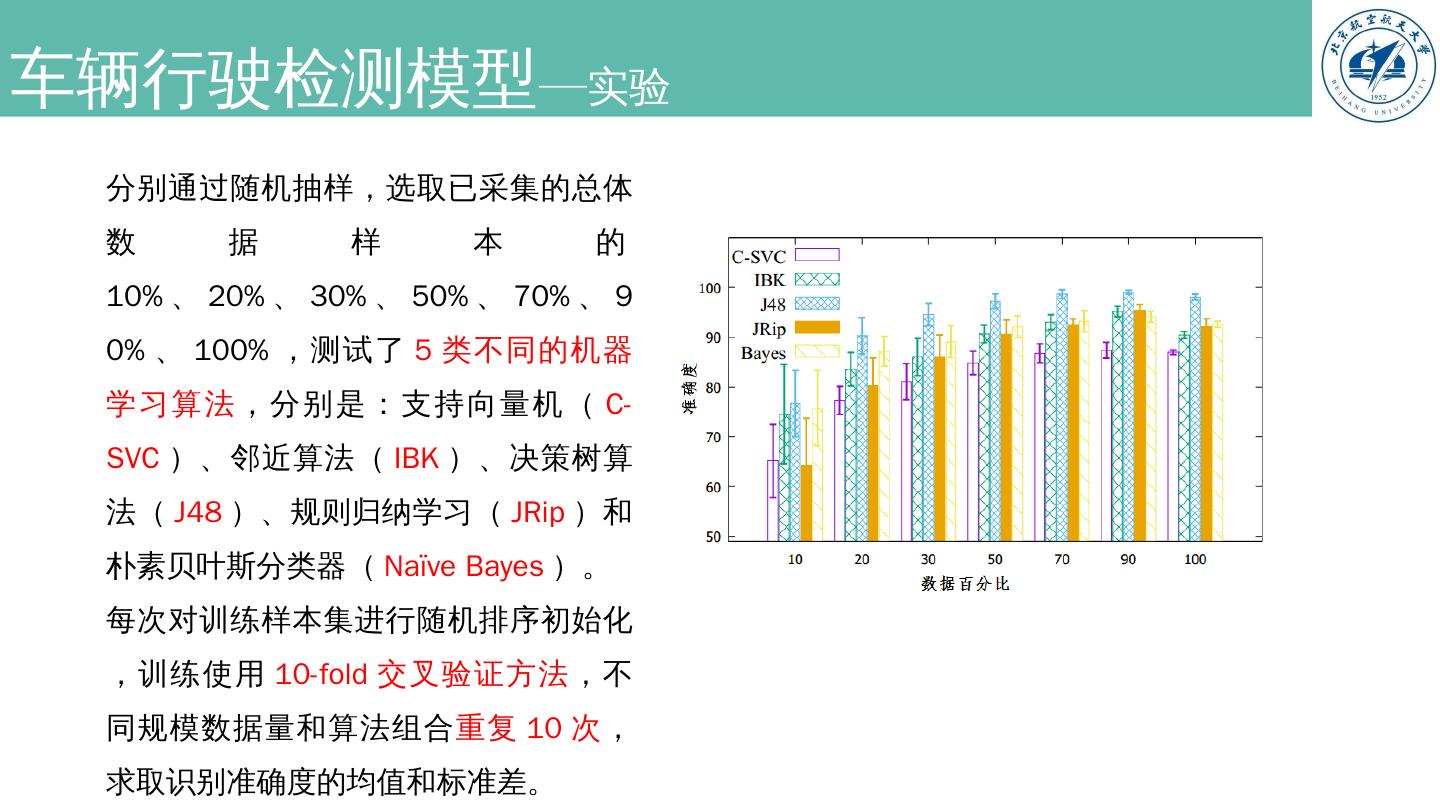
10 .车辆行驶检测模型—实验
分别通过随机抽样,选取已采集的总体
数 据 样 本 的
10% 、 20% 、 30% 、 50% 、 70% 、 9
0% 、 100% ,测试了 5 类不同的机器
学习算法,分别是:支持向量机( C-
SVC )、邻近算法( IBK )、决策树算
法( J48 )、规则归纳学习( JRip )和
朴素贝叶斯分类器( Naïve Bayes )。
每次对训练样本集进行随机排序初始化
,训练使用 10-fold 交叉验证方法,不
同规模数据量和算法组合重复 10 次,
求取识别准确度的均值和标准差。
�
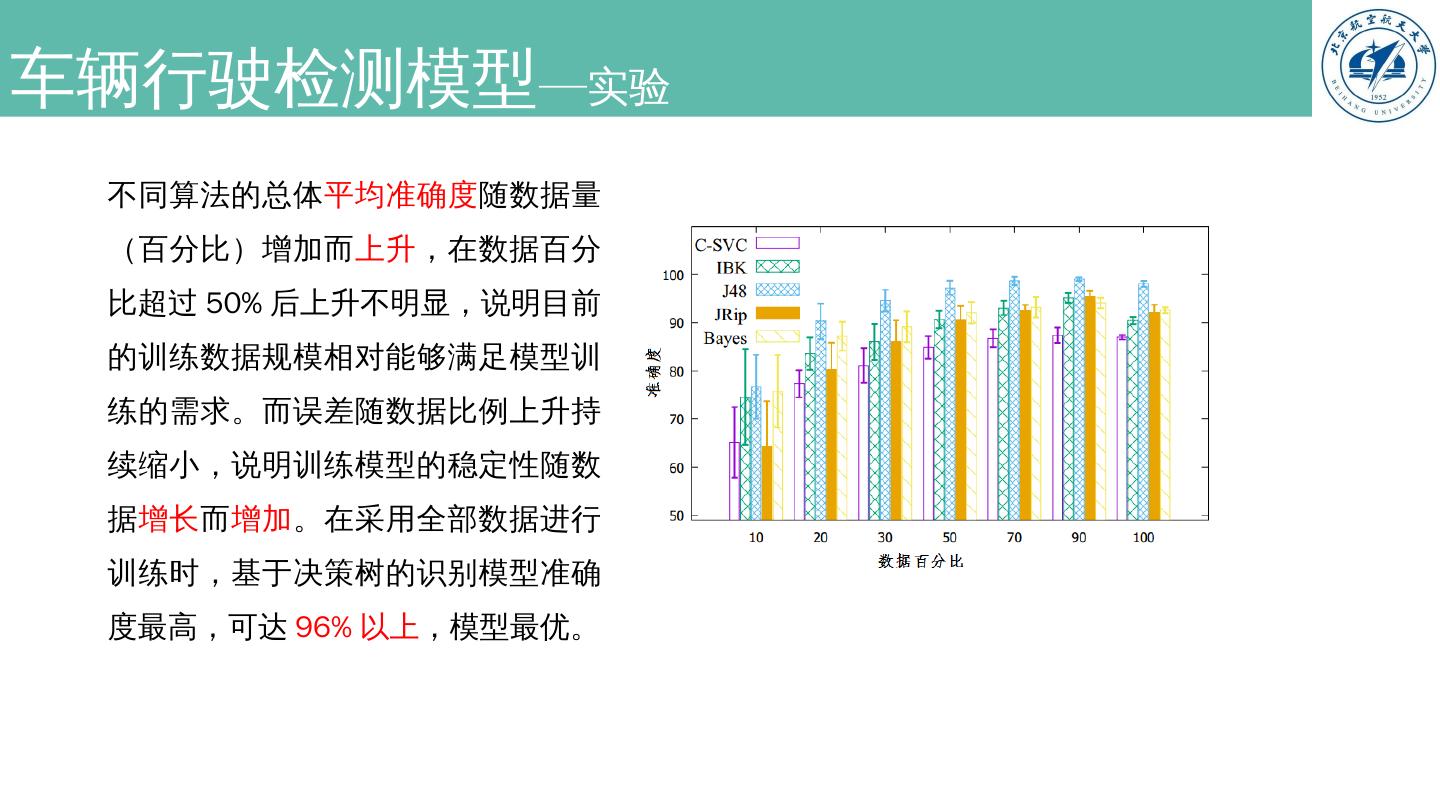
11 .车辆行驶检测模型—实验
不同算法的总体平均准确度随数据量
(百分比)增加而上升,在数据百分
比超过 50% 后上升不明显,说明目前
的训练数据规模相对能够满足模型训
练的需求。而误差随数据比例上升持
续缩小,说明训练模型的稳定性随数
据增长而增加。在采用全部数据进行
训练时,基于决策树的识别模型准确
度最高,可达 96% 以上,模型最优。
�
12 .总结
采集平台搭建 行驶数据存储 驾驶行为识别
• 校园 IPv6 和 IPv4 • 不同车型的车辆 • Hadoop 云平台
无线网络 • 不同类型的智能 • MultiWave 波形
• C/S 架构的服务 终端 识别算法
器 • 多名驾驶员 • 决策树识别算法
• Android 智能移
动端采集系统
• 众包技术的采集
策略
�
13 .未来工作
• 将该决策树算法及相关的决策参数整合到移动智能终端,使得智能终端能
够实时对车辆的行驶模式进行判断
• 接下来的工作将在此基础上进一步提出危险驾驶识别模型,并通过 IPv6
网络构建车联网环境,进行相关的模拟实验,对危险驾驶车辆进行评级,
构建通过车联网环境下的危险车辆周边预警系统
�