展开查看详情
1 .Lecture 14: Path Planning II
Autonomous Robots, 16-200
Carnegie Mellon University Qatar
�
2 . Overview
Logistics
Movie
Path Planning continued
�
3 . Logistics
We will send you detailed feedback on your
presentation and report as soon as we are done
grading your reports
Your project topics (title plus one paragraph) are
important – come and see us if you need help with
your topic
HW #3 is due next Monday by 10:30a.m.
Lab #3 optional second try due on Thursday during
lab – sign up for slots! Timing will be very strict.
We will complete the question portion of lab #3
tomorrow so come to the lab even if you don’t
want to repeat it
Lab #4 will be assigned tomorrow
�
4 .Plan
Today:
Path Planning II
Next week:
Coordination
�
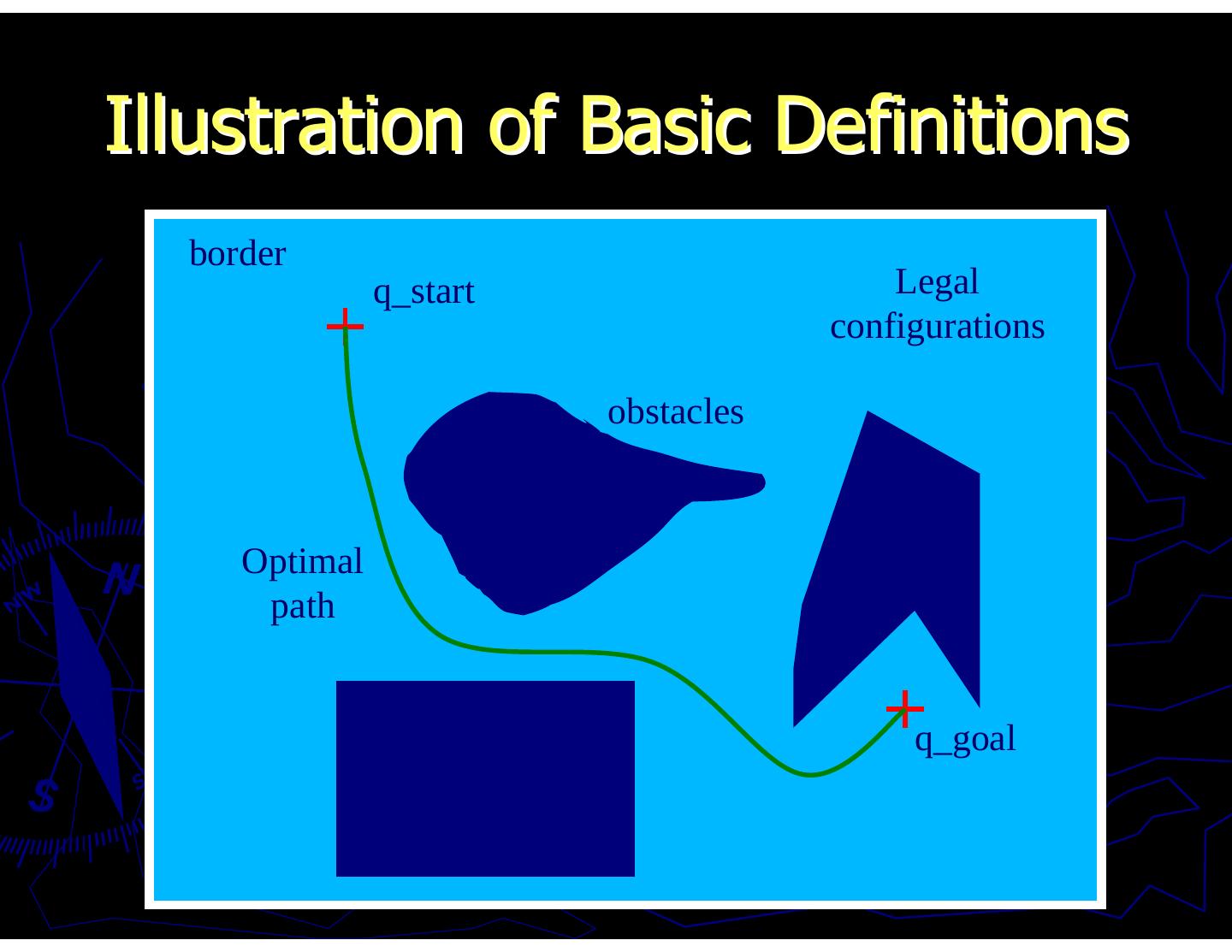
6 . Path Planning Problem
Given an initial configuration q_start
and a goal configuration q_goal, we
must generate the best continuous path
of legal configurations between these
two points, if such a path exists.
�
7 .Illustration of Basic Definitions
border
q_start Legal
configurations
obstacles
Optimal
path
q_goal
�
8 . C-Space Transform Steps
For a mobile robot that only translates
Choose point on the robot.
Grow obstacle by translating robot around the edge of
the obstacle and tracing line made by the reference
point of the robot.
Represent the robot only by the reference point.
Legal configurations now consist of all non-obstacle
points.
There is a trick to make this process easier.
Robots that can rotate as well are usually
represented by a circle.
Once the obstacles have been grown, you can
plan a path!
�
9 .Path-Planning Algorithms
Potential methods
Visibility graphs
Voronoi diagrams
Cell decomposition
*Note: We don’t go over details of
implementation here – just the
concepts.
�
10 . Potential Methods
We already learnt Potential Fields – these can be
used for path planning!
Define f(q) such that:
f grows huge as the robot moves towards an obstacle
f grows small as the robot moves towards the goal
Possible f functions:
dg(q) = distance from q to q_goal
d1(q) = distance from q to nearest obstacle
f(q) = d1(q) – dg(q) OR
f(q) = 0.5 β(dg(q))2 + 0.5λ(d1(q))-2
Path is given by following steepest descent on f
�
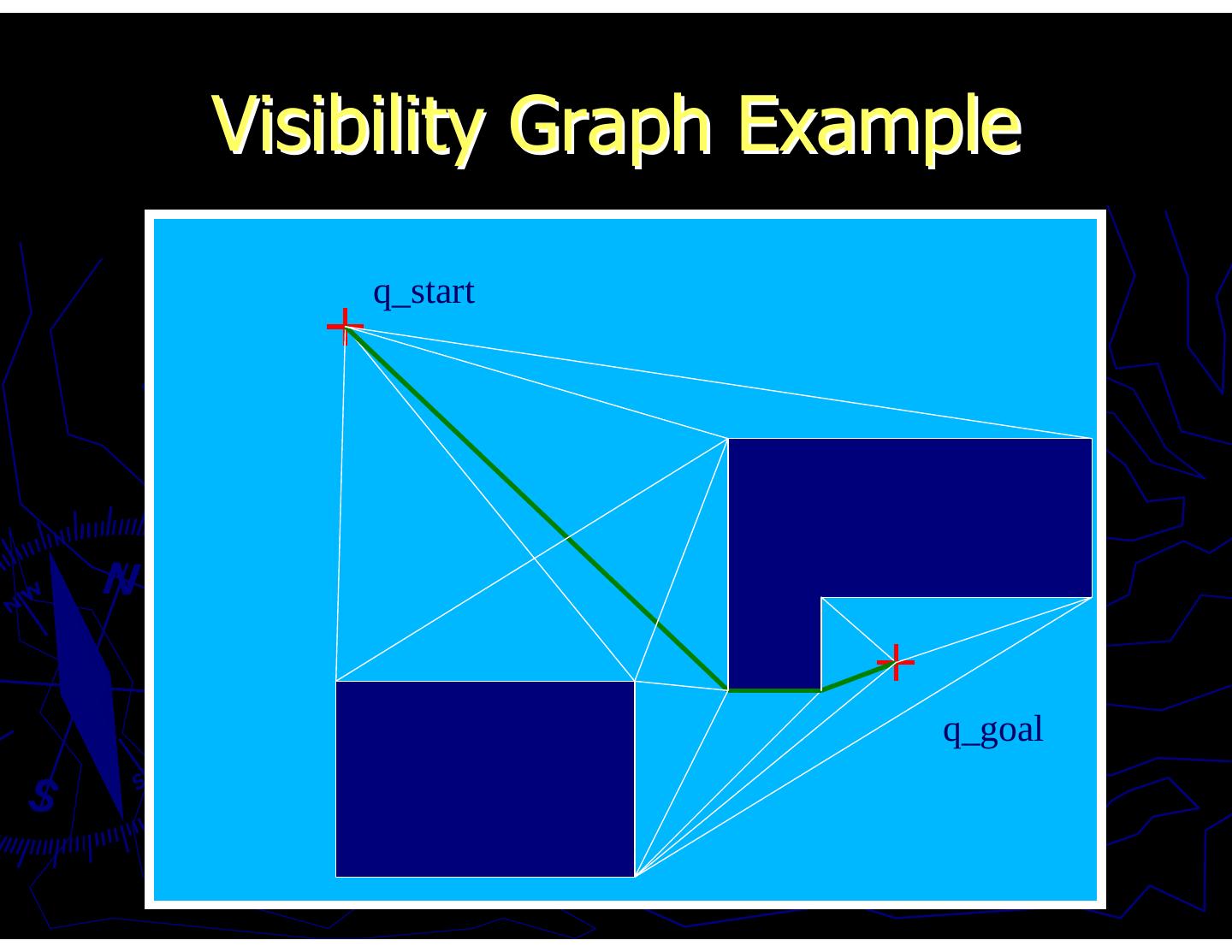
11 .Visibility Graph Example
q_start
q_goal
�
12 .Voronoi Graph Example
q_start
h q_goal
�
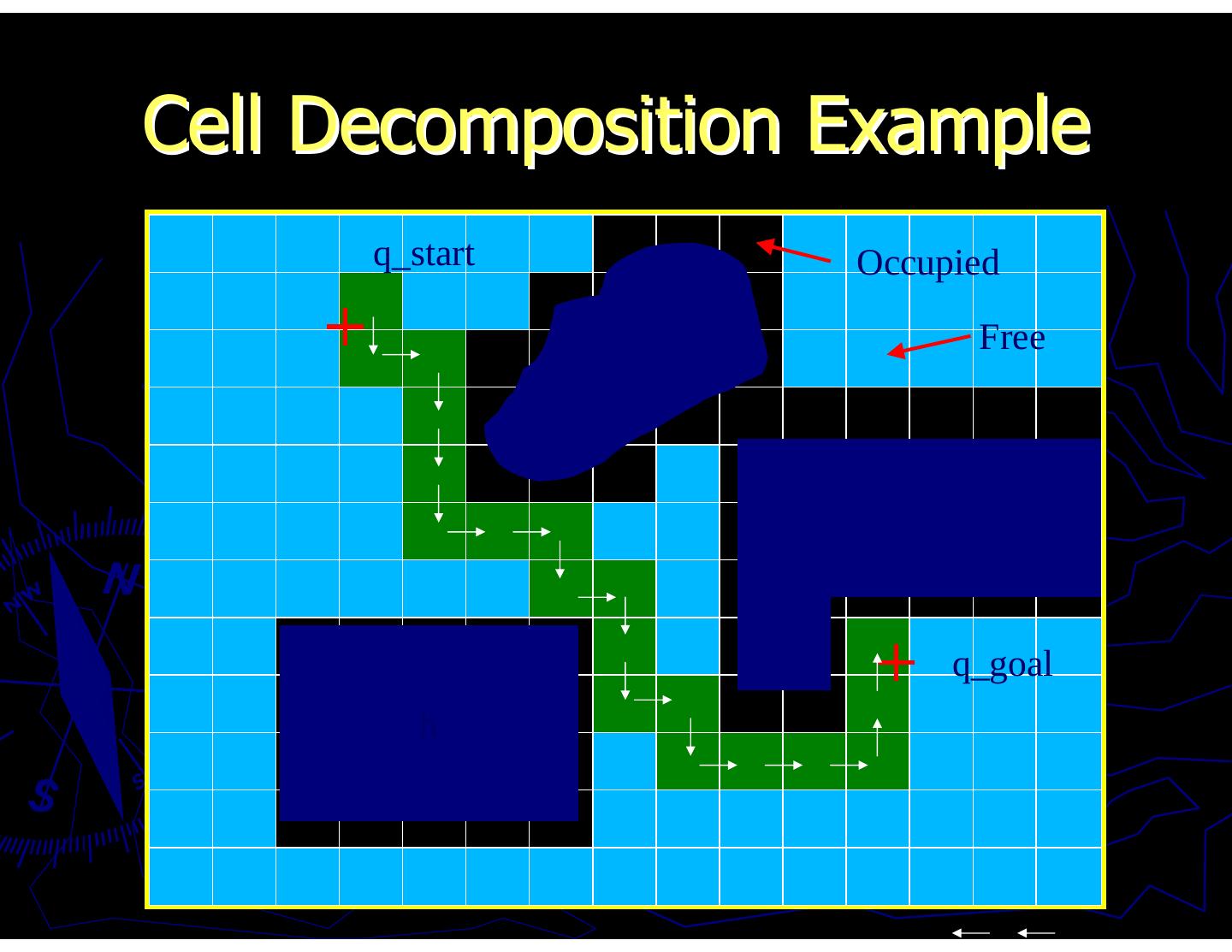
13 . Cell Decomposition
Last approach: Divide C-space into convex
polygons and plan between legal cells
We’ll use grids…but algorithm extends to
general convex polygons of different sizes
Algorithm:
1. Start with C-space map
2. Divide map into polygons
3. Mark cells containing obstacles as occupied
4. Search for path to goal using unoccupied cells
�
14 .Cell Decomposition Example
q_start Occupied
Free
q_goal
h
�
15 .Cell Decomposition in Practice
Multiple ways to sub-divide C-space
Grids, Quad-trees
Resolution is a limiting issue
Too fine a grid leads to long search time
Too coarse a grid misses paths
May require post planning smoothing
Requires a search algorithm
E.g. A* and D*
�
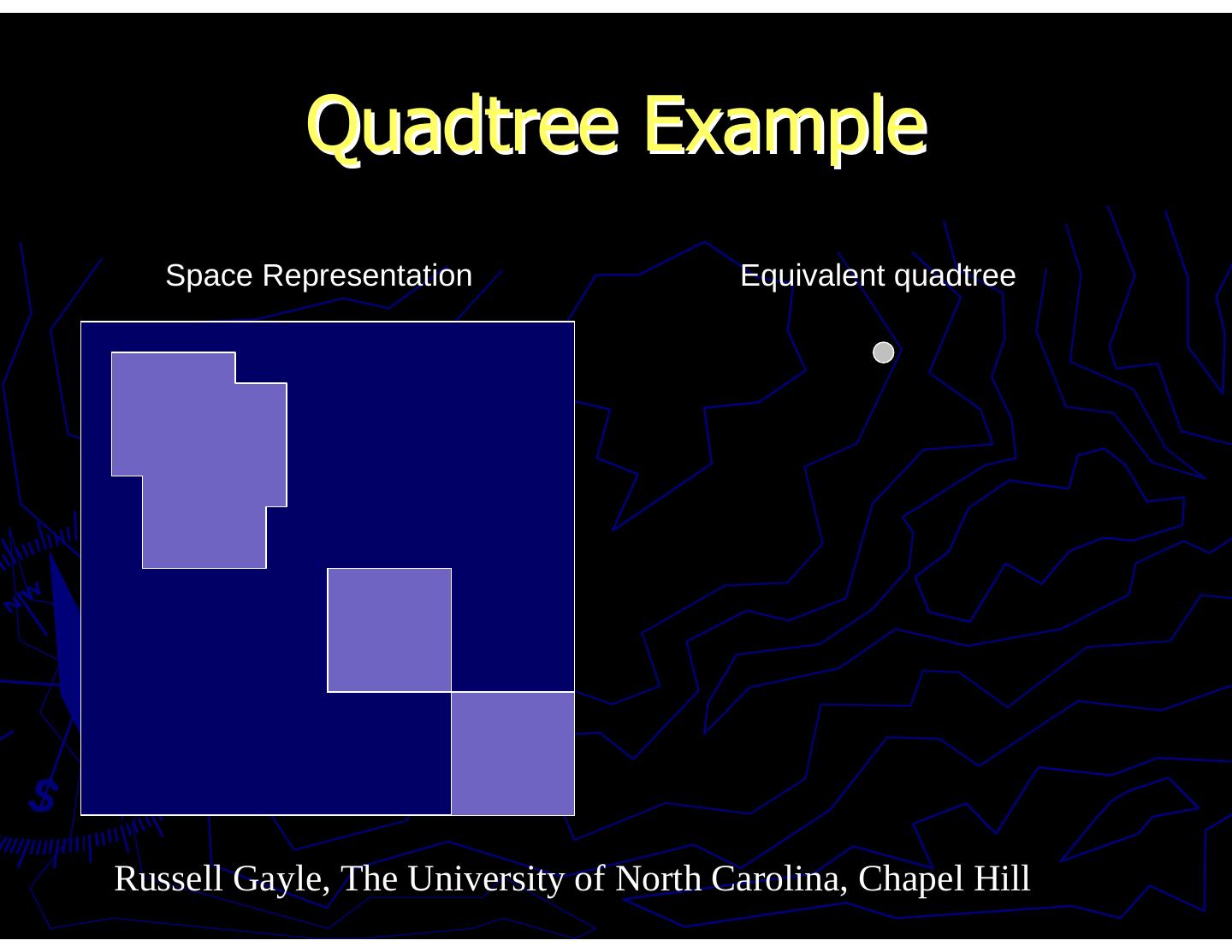
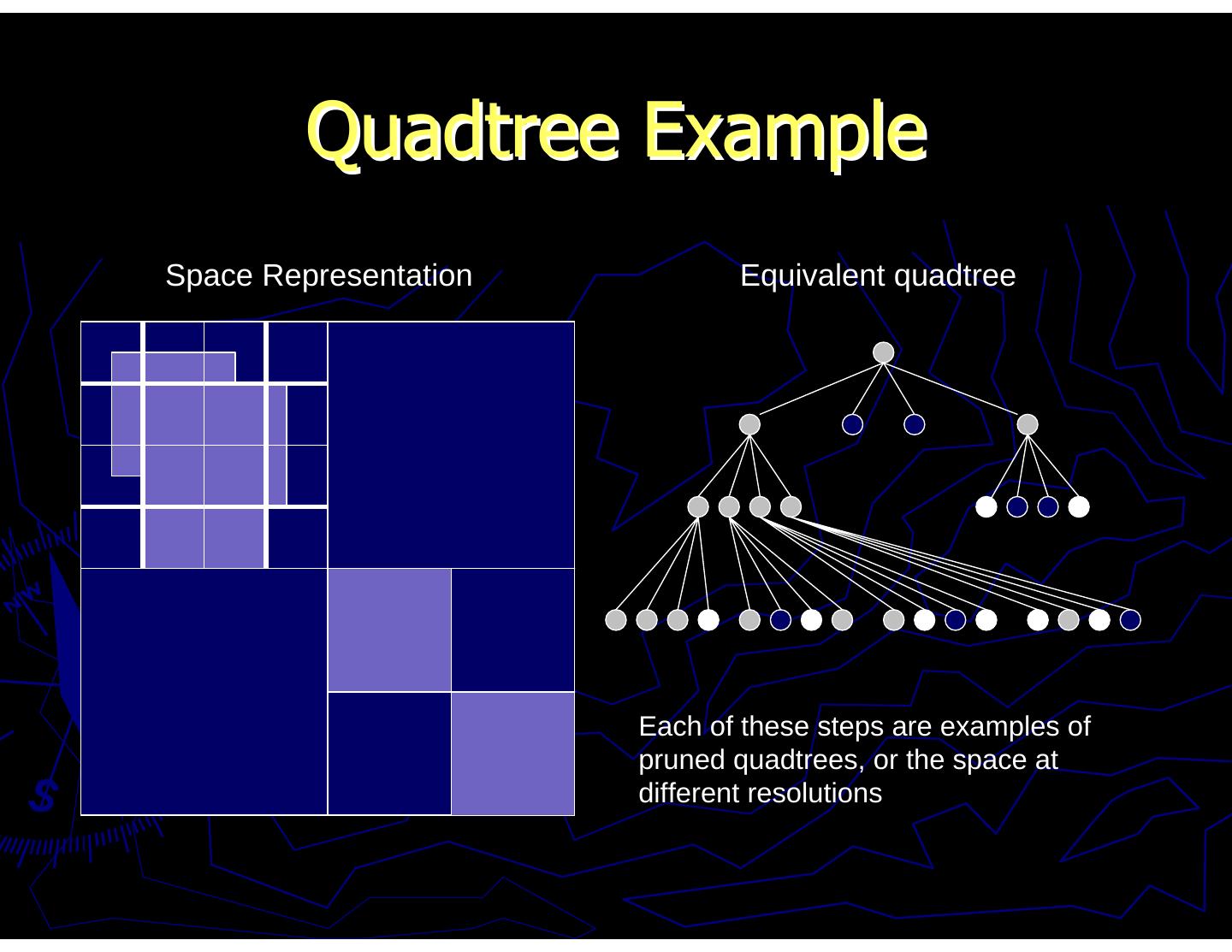
17 . Quadtree Example
Space Representation Equivalent quadtree
Russell Gayle, The University of North Carolina, Chapel Hill
�
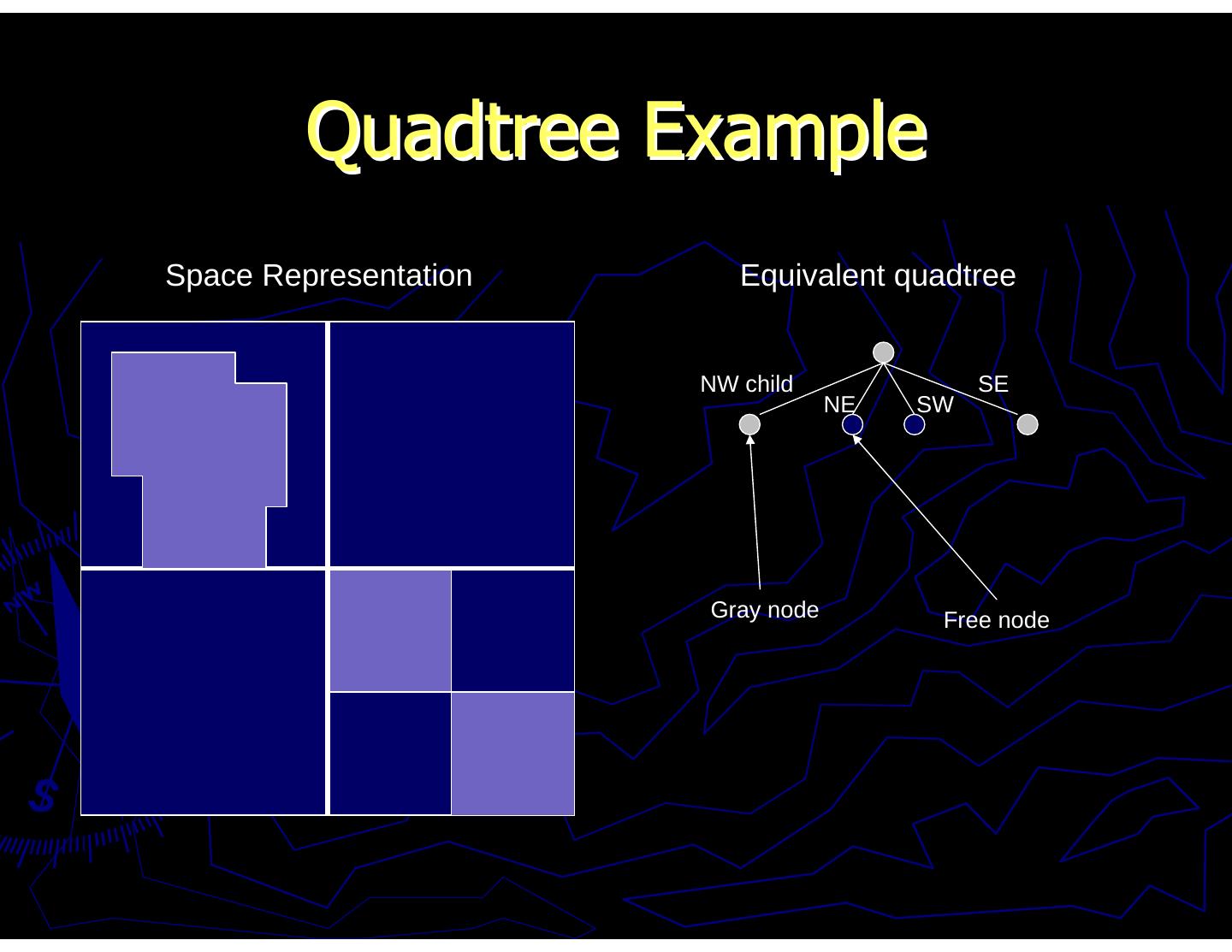
18 . Quadtree Example
Space Representation Equivalent quadtree
NW child SE
NE SW
Gray node Free node
�
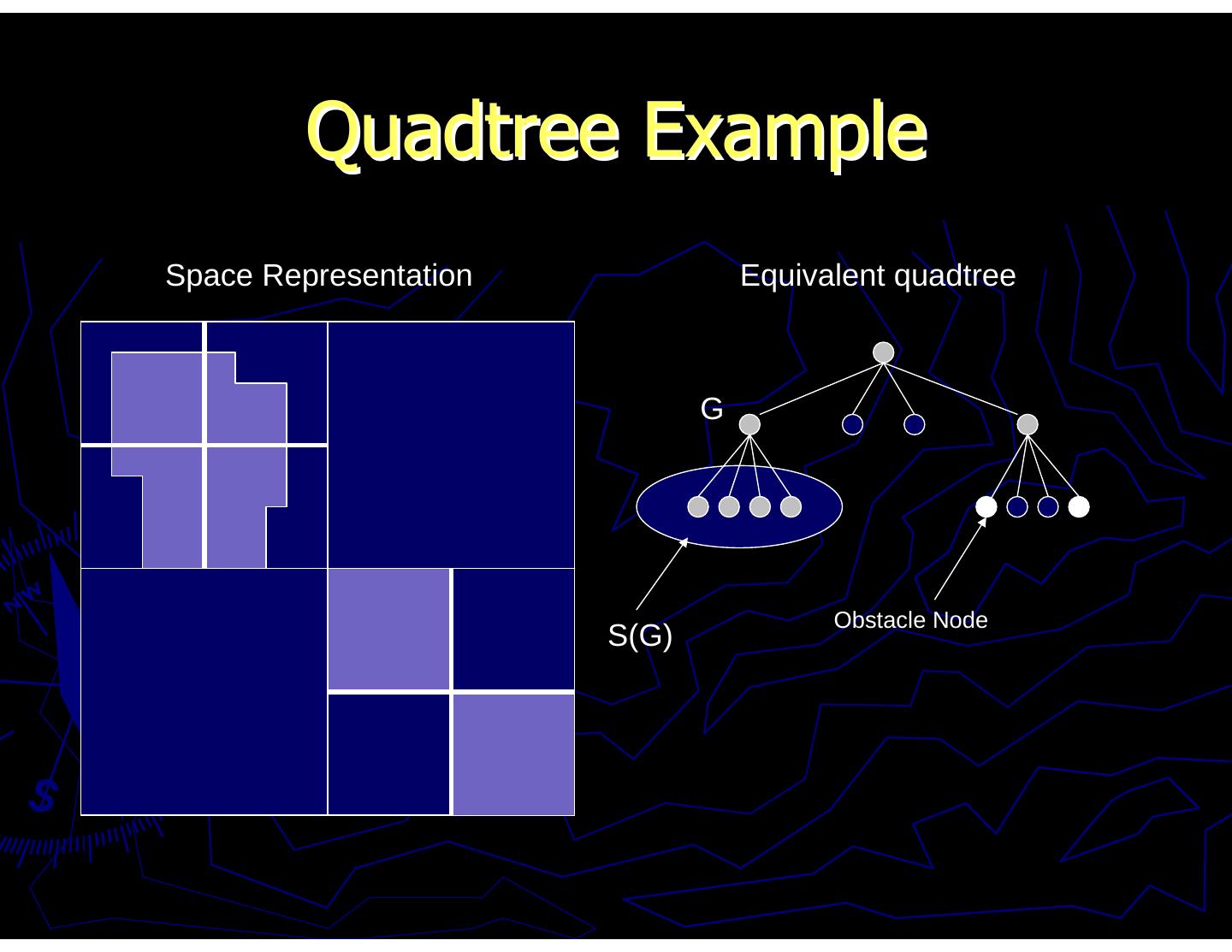
19 . Quadtree Example
Space Representation Equivalent quadtree
G
Obstacle Node
S(G)
�
20 . Quadtree Example
Space Representation Equivalent quadtree
Each of these steps are examples of
pruned quadtrees, or the space at
different resolutions
�
21 . Quadtree Example
Space Representation Equivalent quadtree
�
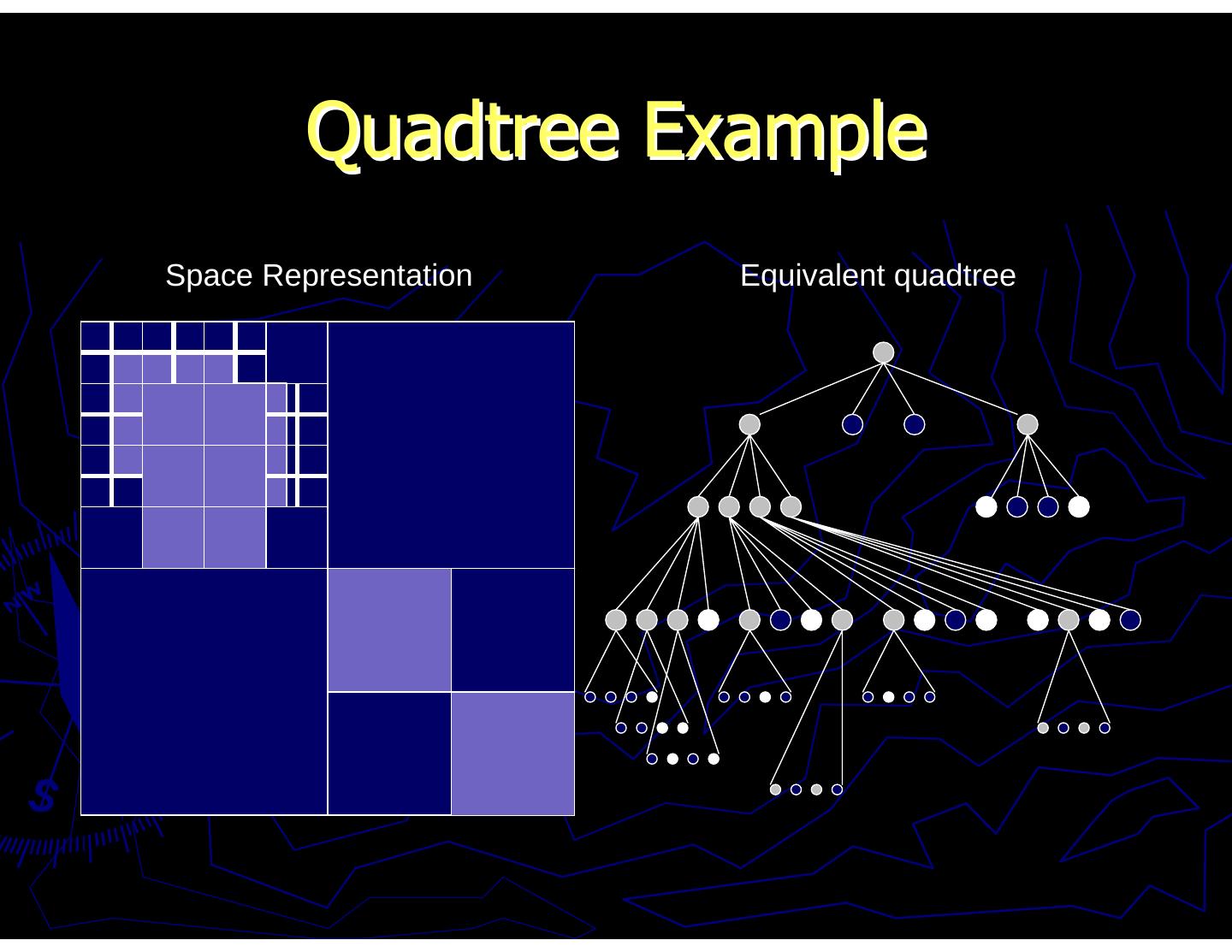
22 . Quadtree Example
Space Representation Equivalent quadtree
Complete quadtree
�
23 .Quadtree-Based Path Planning
Preprocessing
Step 1
Grow the obstacles by radius of the robot’s cross section
Convert the result into a quadtree
Step 2
Compute a distance transform of the free nodes (from the
center of the region represented by a node to the nearest
obstacle)
Given start and goal points
Determine the nodes S and G which contains these points
Compute the minimum cost path from S to G through free
nodes using the A* graph search
�
24 . Search
Once you have your graph you need to
search for the best path
Several search methods can be used:
A* is the most popular (we will discuss this
briefly on Monday)
Other options include random search, depth
first search, breadth first search, etc.
Good search techniques are important for a
variety of reasons – you will learn more
about them in 15-211 and other CS classes
�
25 . A Bit of Trivia
The concept of a Web spider was
developed by Dr. Fuzzy Mouldin
Implemented in 1994 on the Web
Went into the creation of Lycos Dr. Michael L.
(Fuzzy) Mauldin
Lycos propelled CMU into the top 5
most successful schools
Commercialization proceeds
Tangible evidence
Newell-Simon Hall
�
26 . End of slides!
See you tomorrow in lab!
�