展开查看详情
1 .• 16 April 2011
• Alan, Edison, etc , Saturday.
�
2 . Knowledge, Planning
and Robotics
1. Knowledge
2. Types of knowledge
3. Representation of knowledge
4. Planning
5. Knowledge for planning
6. Planning in robotics
7. Logic in robot planning and behavior
�
3 . Knowledge Representation
1. Representational adequacy
1. declarative, procedural
2. Inferential adequacy
1. manipulate knowledge
2. incorporate new knowledge
�
4 . Types of Knowledge
1. Simple facts
2. Complex organized knowledge
3. procedure - how to knowledge
4. meta-knowledge
�
5 . Semantic Data Models
• High level model of model
– Model of conceptual model
• Not tied to implementation concerns
• Focus on
– expressiveness
– simplicity
– concise
– formality
�
6 . Semantic Nets
• Nodes represent Objects
• Links or Arcs represent Relationships
– “instance of” - set membership
– “is a” - inheritance
– “ has a” - attribute descriptors
– “part of” - aggregation
�
7 . Is a
Has a
Part-of
Instance of
�
8 . Semantic Nets
Advantages Disadvantages
• Flexible • Hard to deal with
• easy to understand exceptions
• support inheritance • procedural knowledge
• difficult to represent
“natural” way to
represent knowledge • no standards for
defining nodes or
relationships
�
9 . Classes, Objects, Attributes, Values - Object
Orientation
• Classes describe common properties of
objects
• Objects may be physical or conceptual
• Attributes are characteristics of objects
• Values are specific measures of Attributes for
specific instances
�
10 . Classes
• Specify common properties of instances
• support hierarchical classification
• superclass / subclass
– subclass may be more refined version
– each subclass inherits operations and attributes of
its ancestors
– subclass may have its own operations and
attributes
�
11 . Objects or Instances
• Refers to things identified in model of
conceptual model
– may be tangible (equipment, part, orders,
squashed bananas)
– may be mental constructs
�
12 .Class vs instances
instances
�
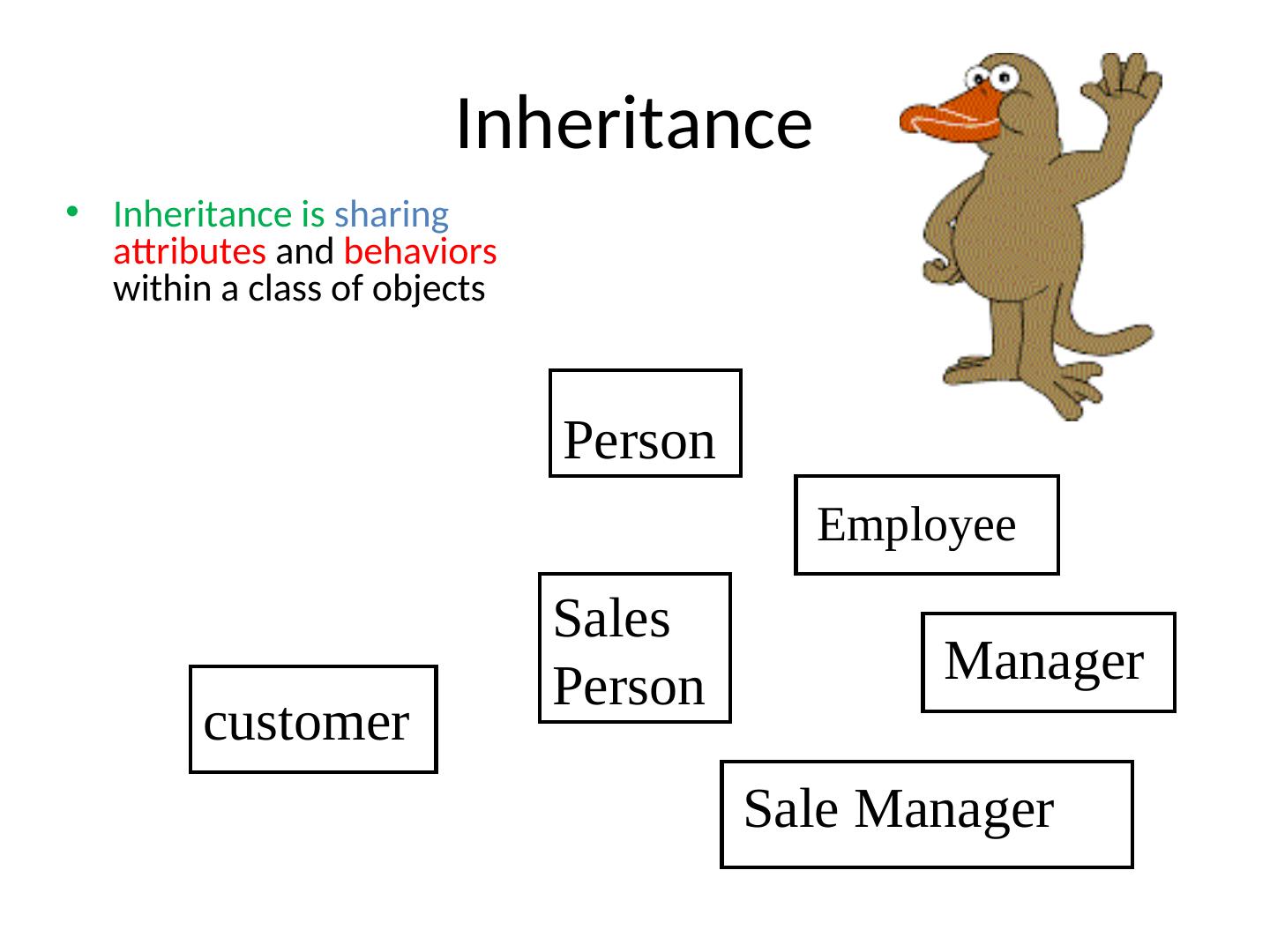
13 . Inheritance
• Inheritance is sharing
attributes and behaviors
within a class of objects
Person
Employee
Sales
Person Manager
customer
Sale Manager
�
14 . Encapsulation
• Attributes and behaviors (methods)
integrated with the classes and objects
Attributes:
size, location,
appearance
�
15 . Polymorphism
• Each object responds in its unique way to
messages When changed method
When needed method
�
16 . Object-Orientation
• Tool for managing complexity
1. emphasis on object structure
2. specify “what is”
3. mapped directly from semantic net
�
17 . Rule Representations
• Rules are called productions
• Rule have two parts
– condition part, premise -> IF
– action part ,conclusion-> THEN
• The action can:
– add a fact to the knowledge base,
– start a procedure
– or display a screen
�
18 . Rules represent knowledge
• Apply O-A-V framework (object-attribute-
value)
• IF air vehicle is a plane AND plane maximum
altitude is 40000 AND plane manufacturer is
Boeing THEN ASK Flight Display 15
�
19 . Representing knowledge
• Abstracting with rules
– translate quantitative to qualitative
– define technical terms
– support generalized reasoning
• make rules for user
– easy to understand
– help user follow decision logic
�
20 . Rule for understanding
• Quantitative to Qualitative
– qualitative language is easier to understand
– interpretation of numerical data
– make user feel comfortable with decision logic
• If temperature > 200 and humidity is 85% then
machine is slightly overheated
�
21 . Definitional Rules
• Help communicate and train users
• Help user understand vocabulary
• Promotes common agreement on terms for
expert, user and knowledge engineer
• IF you want more than one source file of
classes THEN use package keyword
�
22 . Rules support Generalizations
• Allow reasoning with from specialization to
generalizations
• Support classification of objects at higher
levels
• Support refinements
�
23 . Surface Knowledge
1. Hard to understand
2. Difficult to learn
reasoning strategies
3. hard to update and
expand knowledge
base
If pump operation temperature is over 300
AND water mixture pH > 5.2
THEN replace pump bearing and oil
�
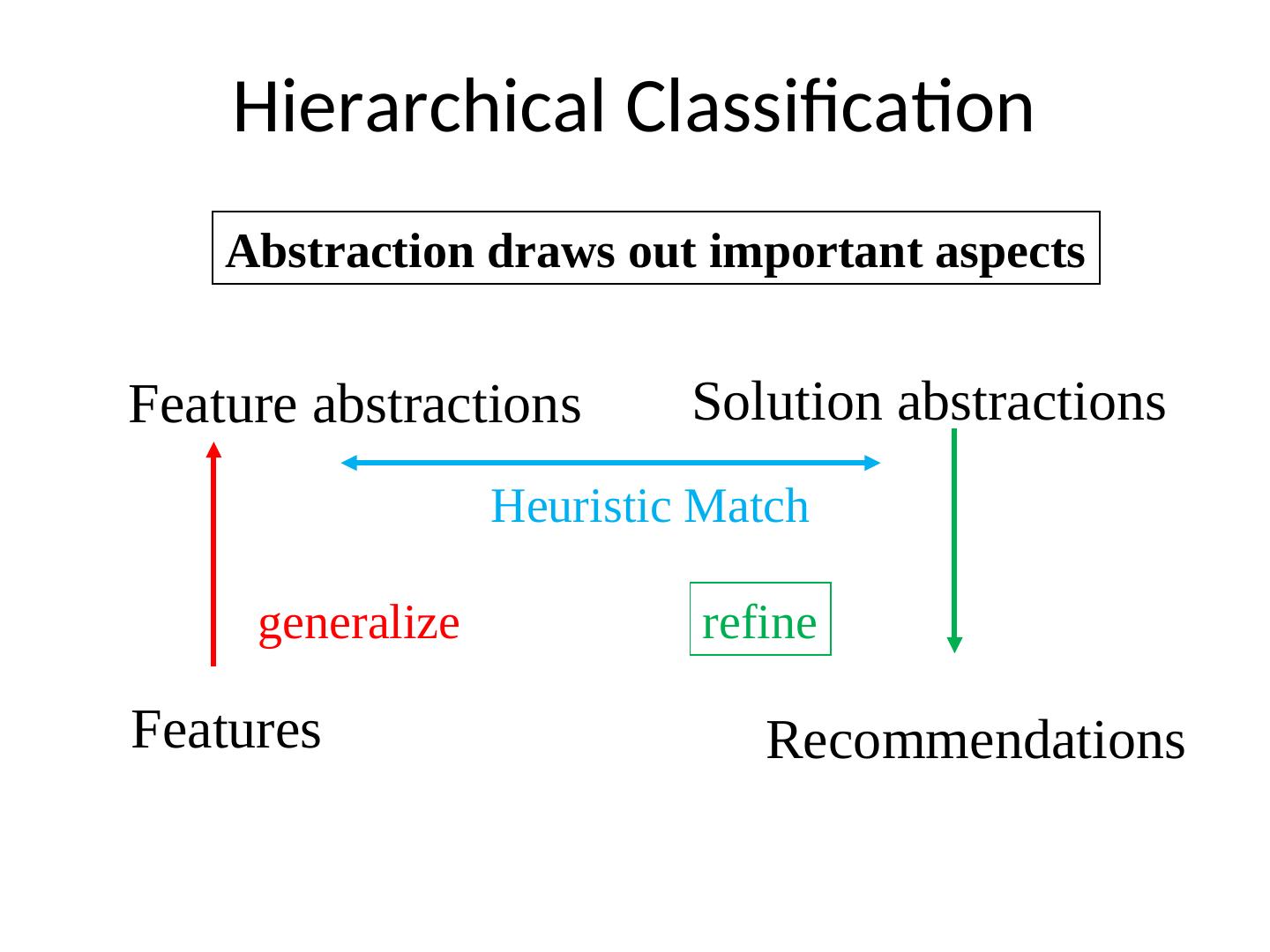
24 . Hierarchical Classification
Abstraction draws out important aspects
Feature abstractions Solution abstractions
Heuristic Match
generalize refine
Features Recommendations
�
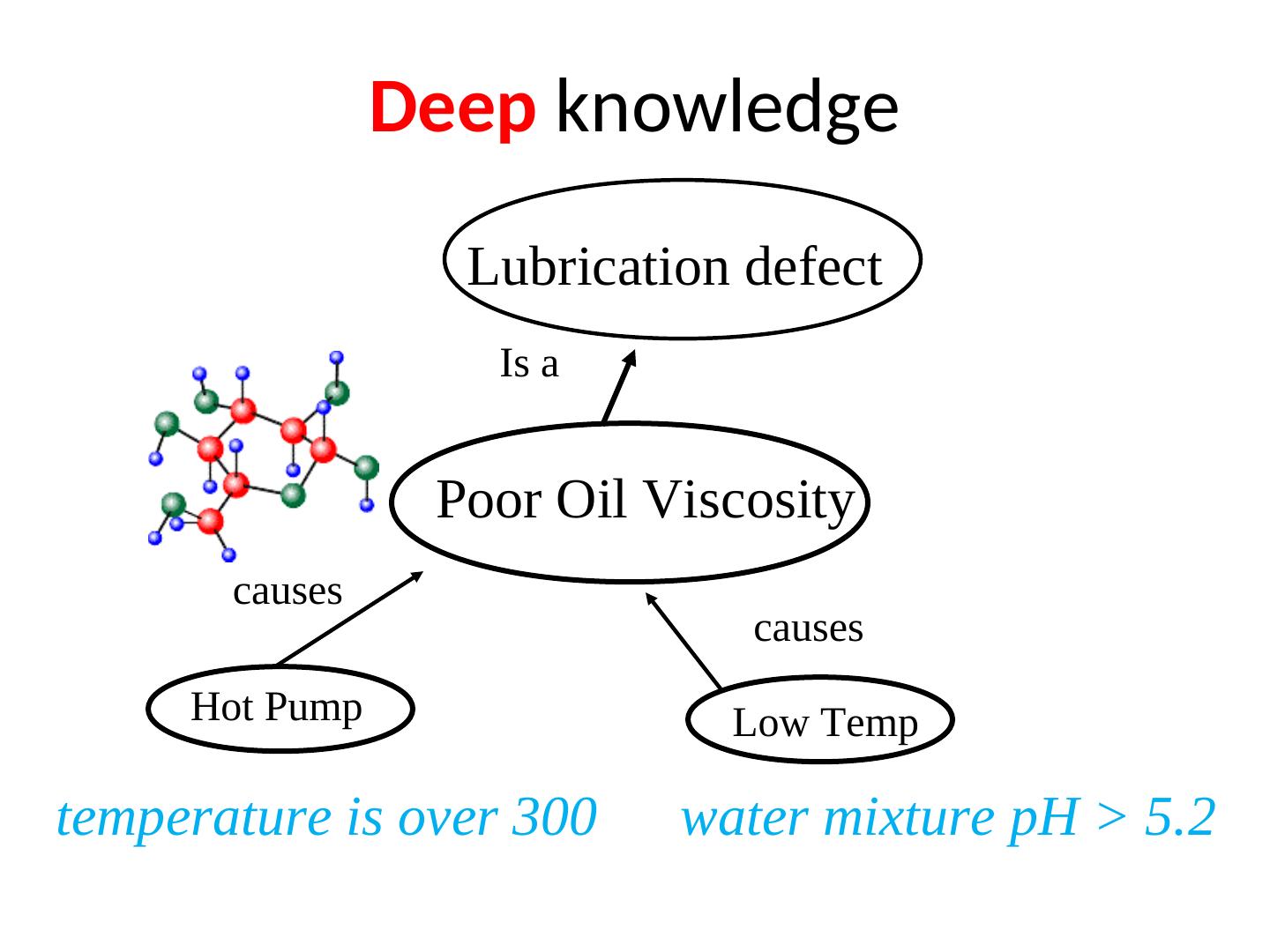
25 . Deep knowledge
Lubrication defect
Is a
Poor Oil Viscosity
causes
causes
Hot Pump Low Temp
temperature is over 300 water mixture pH > 5.2
�
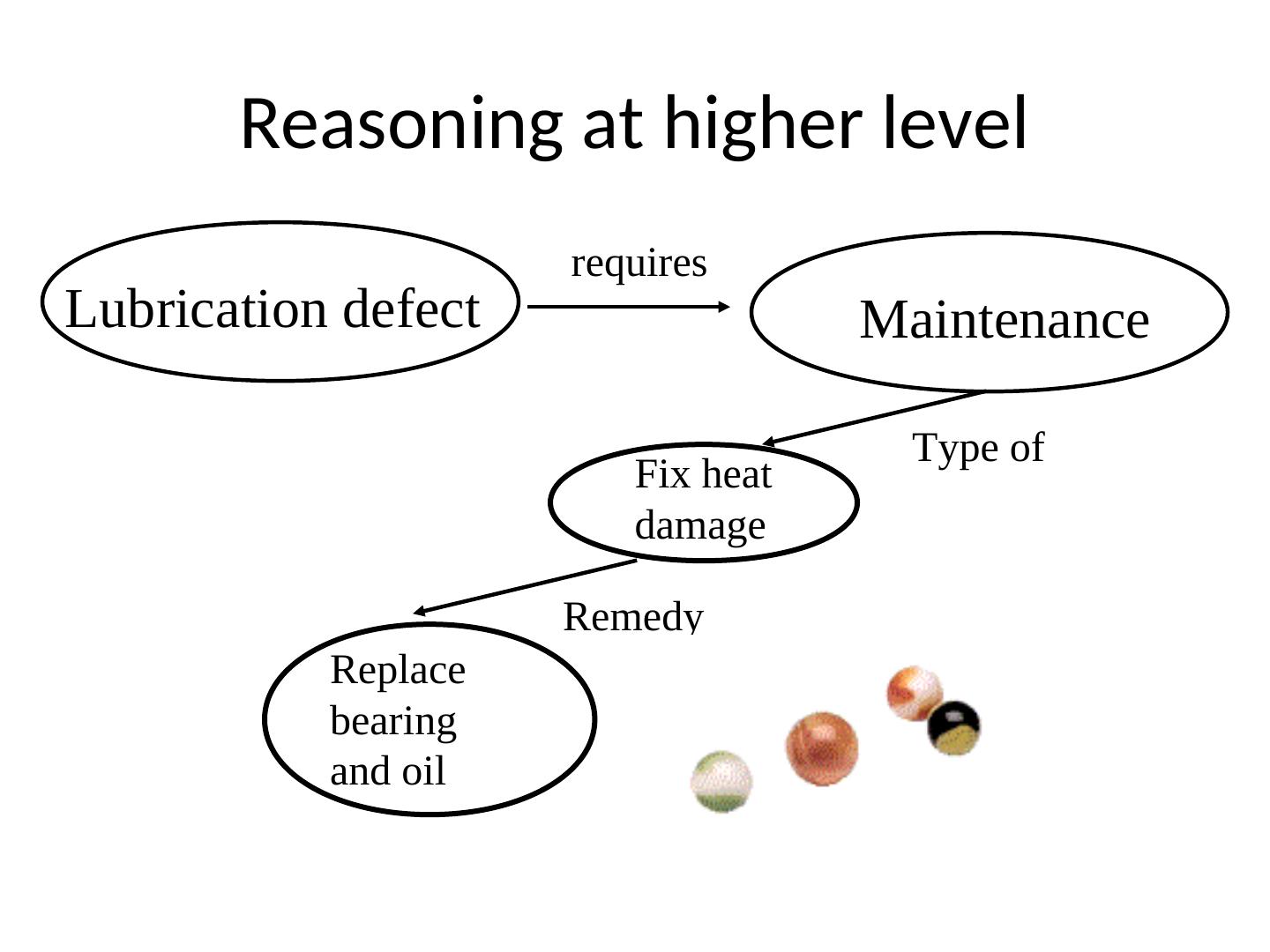
26 . Reasoning at higher level
requires
Lubrication defect Maintenance
Type of
Fix heat
damage
Remedy
Replace
bearing
and oil
�
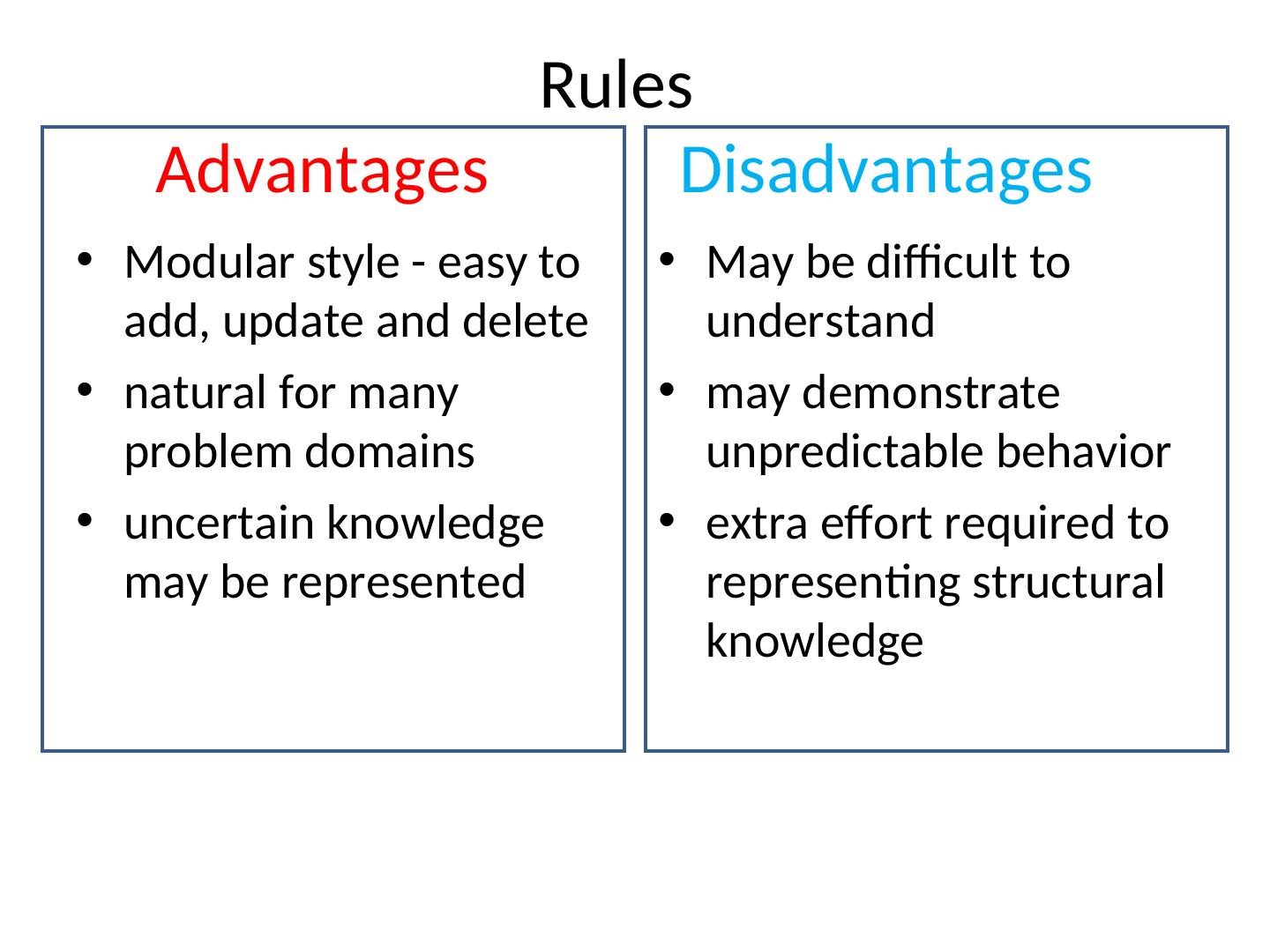
27 . Rules
Advantages Disadvantages
• Modular style - easy to • May be difficult to
add, update and delete understand
• natural for many • may demonstrate
problem domains unpredictable behavior
• uncertain knowledge • extra effort required to
may be represented representing structural
knowledge
�
28 . Predicate Logic
• Programming by description
• describe the problem’s facts
• built in inference engine combines and uses
facts and rules to make inferences
�
29 . Prolog Programming
• Declaring facts about objects and their
relationships -> likes (john,mary)
• Defining rules about objects and relationships
• Asking Questions about objects
sister-of(X,Y) :- female(X),
parents(X,M,F),
parent(Y,M,F)
�