













- 快召唤伙伴们来围观吧
- 微博 QQ QQ空间 贴吧
- 文档嵌入链接
- 复制
- 微信扫一扫分享
- 已成功复制到剪贴板
018-Inference in First Order Logic
This chapter is mainly about inference in first order logic,which generally includes inference rules for FOL,generalized modus ponens,resolution for FOL,converting FOL sentences to clause form,conversion procedure to CNF and so on.
展开查看详情
1 .• April 23 • Alan Cheng, Justin Cheng, Matthew Mglej, Anika Raghuvanshi 1
2 . Inference in First Order Logic Some material adopted from notes by Tim Finin, Andreas Geyer-Schulz, and Chuck Dyer 2
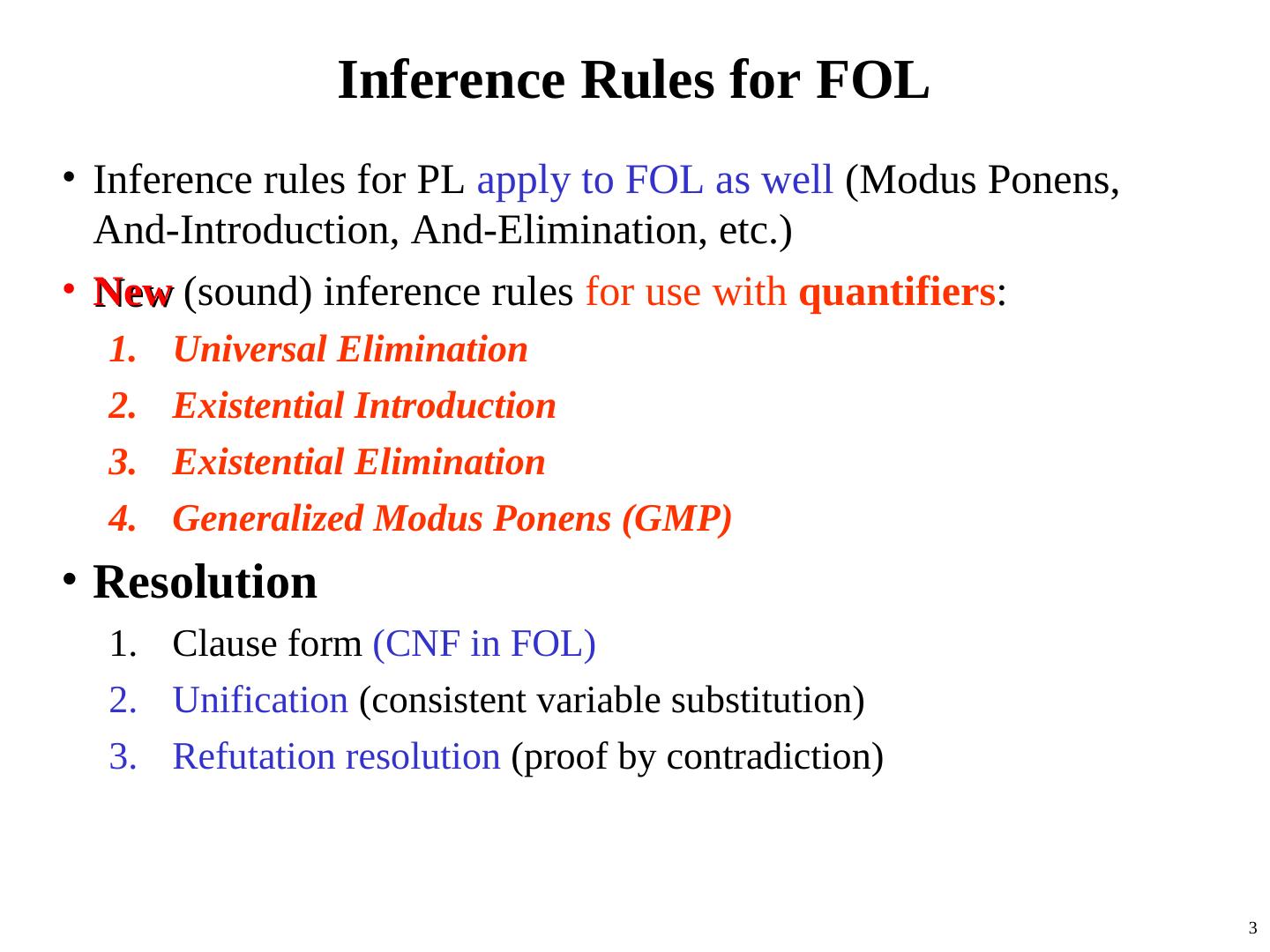
3 . Inference Rules for FOL • Inference rules for PL apply to FOL as well (Modus Ponens, And-Introduction, And-Elimination, etc.) • New (sound) inference rules for use with quantifiers: 1. Universal Elimination 2. Existential Introduction 3. Existential Elimination 4. Generalized Modus Ponens (GMP) • Resolution 1. Clause form (CNF in FOL) 2. Unification (consistent variable substitution) 3. Refutation resolution (proof by contradiction) 3
4 .1.Universal Elimination 2.Existential Introduction 3.Existential Elimination 4
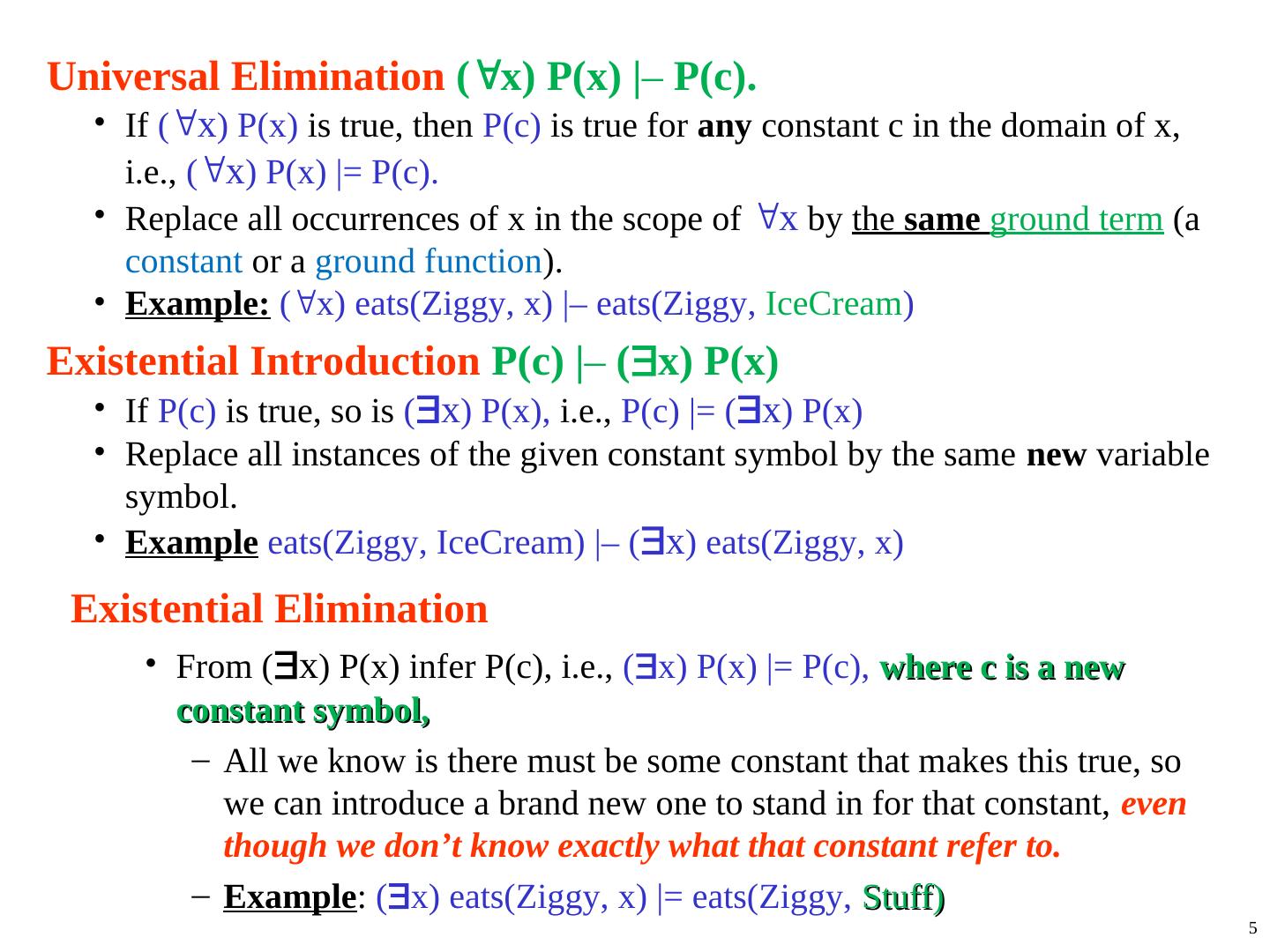
5 .Universal Elimination (x) P(x) |– P(c). • If (x) P(x) is true, then P(c) is true for any constant c in the domain of x, i.e., (x) P(x) |= P(c). • Replace all occurrences of x in the scope of x by the same ground term (a constant or a ground function). • Example: (x) eats(Ziggy, x) |– eats(Ziggy, IceCream) Existential Introduction P(c) |– (x) P(x) • If P(c) is true, so is (x) P(x), i.e., P(c) |= (x) P(x) • Replace all instances of the given constant symbol by the same new variable symbol. • Example eats(Ziggy, IceCream) |– (x) eats(Ziggy, x) Existential Elimination • From (x) P(x) infer P(c), i.e., (x) P(x) |= P(c), where c is a new constant symbol, – All we know is there must be some constant that makes this true, so we can introduce a brand new one to stand in for that constant, even though we don’t know exactly what that constant refer to. – Example: (x) eats(Ziggy, x) |= eats(Ziggy, Stuff) 5
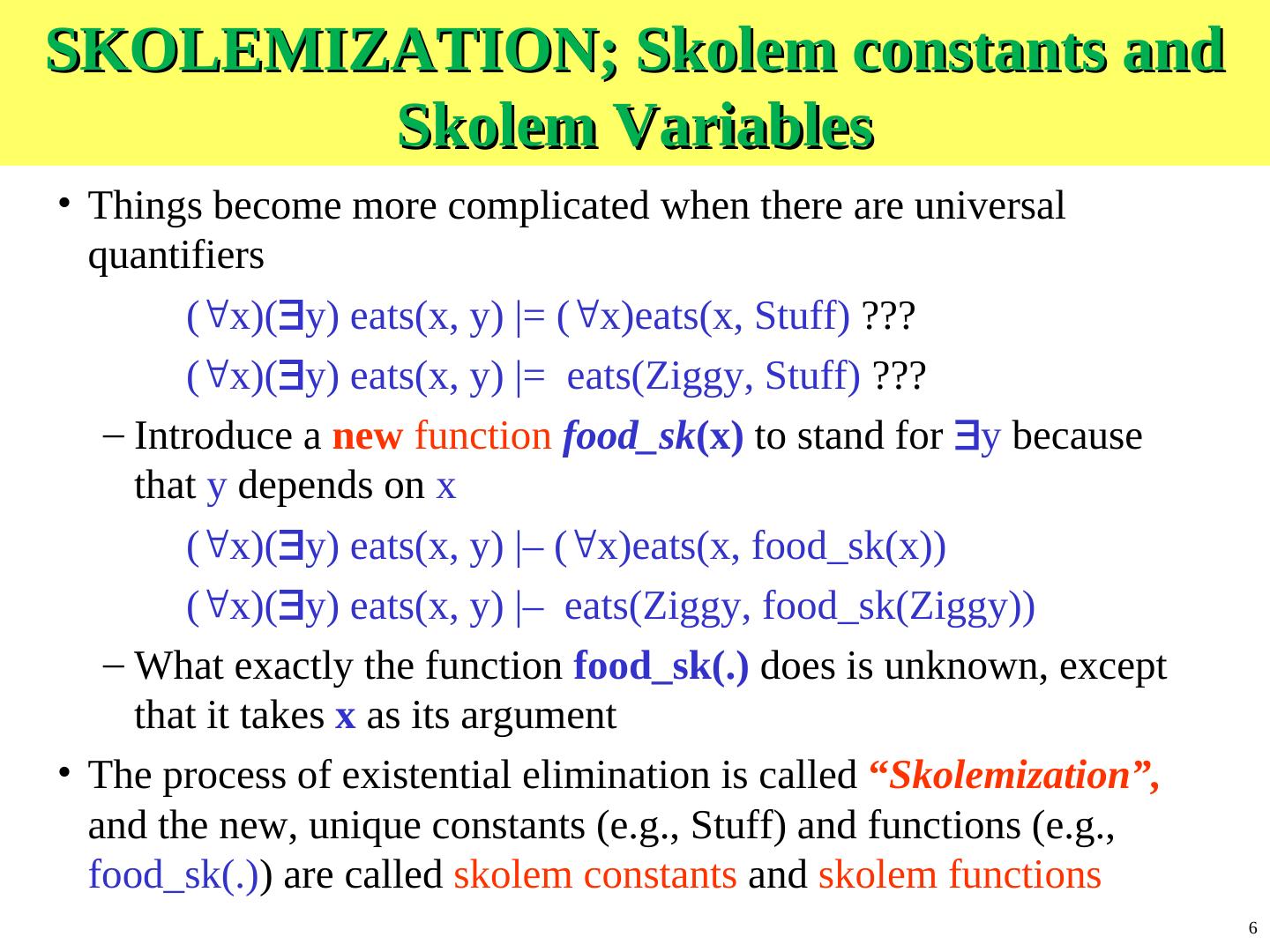
6 .SKOLEMIZATION; Skolem constants and Skolem Variables • Things become more complicated when there are universal quantifiers (x)(y) eats(x, y) |= (x)eats(x, Stuff) ??? (x)(y) eats(x, y) |= eats(Ziggy, Stuff) ??? – Introduce a new function food_sk(x) to stand for y because that y depends on x (x)(y) eats(x, y) |– (x)eats(x, food_sk(x)) (x)(y) eats(x, y) |– eats(Ziggy, food_sk(Ziggy)) – What exactly the function food_sk(.) does is unknown, except that it takes x as its argument • The process of existential elimination is called “Skolemization”, and the new, unique constants (e.g., Stuff) and functions (e.g., food_sk(.)) are called skolem constants and skolem functions 6
7 .Generalized Modus Ponens (GMP) 7
8 . Generalized Modus Ponens (GMP) • Combines And-Introduction, Universal-Elimination, and Modus Ponens • Ex: P(c), Q(c), (x)(P(x) ^ Q(x)) => R(x) |– R(c) P(c), Q(c) |– P(c) ^ Q(c) (by and-introduction) (x)(P(x) ^ Q(x)) => R(x) |– (P(c) ^ Q(c)) => R(c) (by universal-elimination) P(c) ^ Q(c), (P(c) ^ Q(c)) => R(c) |– R(c) (by modus ponens) • All occurrences of a quantified variable must be instantiated to (or substituted by) the same constant. P(a), Q(c), (x)(P(x) ^ Q(x)) => R(x) |– R(c) because all occurrences of x must be either instantiated to a or c which makes the modus ponens rule not applicable. applicable Cannot be different constants 8
9 . Resolution for FOL • Resolution rule operates on two clauses – A clause is a disjunction of literals (without explicit quantifiers) – Relationship between clauses in KB is conjunction – Variables in a clause are considered universally quantified • Resolution Rule for FOL: there can be just one pair of opposing literals, not more, as the sums of literals – clause C1: (l_1, l_2, ... l_i, ... l_n) and must have Hamming distance one – recall consensus, show examples on Kmaps clause C2: (l’_1, l’_2, ... l’_j, ... l’_m) – if l_i and l’_j are two opposite literals (e.g., P and ~P) and their argument lists can be be made the same (unified) by a set of variable bindings {x1/y1, ... xk/yk} where x1, ... xk are variables and x1/y1, ... xk/yk} where x1, ... xk are variables and y1, ... yk are terms, – then derive a new clause (called resolvent) subst((l_1, l_2, ... l_n, l’_1, l’_2, ... l’_m), where function subst(expression, returns a new expression by applying all variable bindings in to the original expression 9
10 .We need answers to the following questions 1.How to convert FOL sentences to clause form (especially how to remove quantifiers): normalization and skolemization 2.How to unify two argument lists, – i.e., how to find their most general unifier (mgu) unification 3.How to determine which two clauses in KB should be resolved next (among all resolvable pairs of clauses) – and how to determine a proof is completed: resolution strategy 10
11 .Converting FOL sentences to clause form • Clauses are quantifier free CNF of FOL sentences • Basic ideas – How to handle quantifiers • Careful on quantifiers with preceding negations (explicit or implicit) ~x P(x) is really x ~P(x) (x P(x)) => (y Q(y)) ~(x P(x)) v (y Q(y)) x ~P(x) v y Q(y) • Eliminate true existential quantifier by Skolemization • For true universally quantified variables, treat them as such without quantifiers – How to convert to CNF (similar to PL after all quantifiers are removed) 11
12 .Conversion procedure to CNF step 1: remove all “=>” and “<=>” operators (using P => Q make ~P v Q and P <=> Q make to P => Q ^ Q => P) step 2: move all negation signs to individual predicates (using de Morgan’s law) step 3: remove all existential quantifiers y case 1: y is not in the scope of any universally quantified variable, then replace all occurrences of y by a skolem constant case 2: if y is in scope of universally quantified variables x1, ... xi, then replace all occurrences of y by a skolem function with x1, ... xi are its argument step 4: remove all universal quantifiers x (with the understanding that all remaining variables are universally quantified) step 5: convert the sentence into CNF (using distribution law, etc) step 6: use parenthesis to separate all disjunctions, then drop all v’s and ^’s
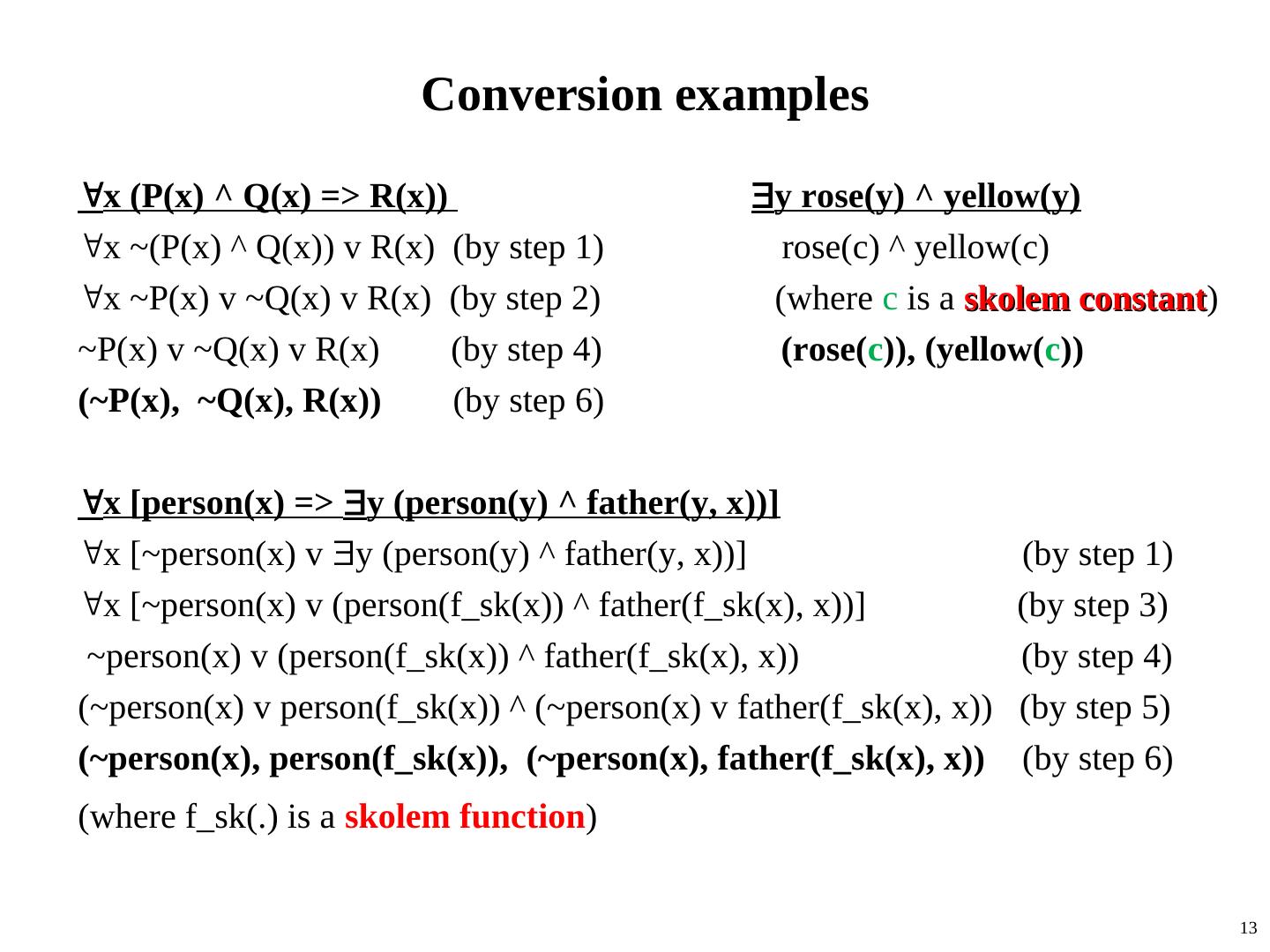
13 . Conversion examples x (P(x) ^ Q(x) => R(x)) y rose(y) ^ yellow(y) x ~(P(x) ^ Q(x)) v R(x) (by step 1) rose(c) ^ yellow(c) x ~P(x) v ~Q(x) v R(x) (by step 2) (where c is a skolem constant) constant ~P(x) v ~Q(x) v R(x) (by step 4) (rose(c)), (yellow(c)) (~P(x), ~Q(x), R(x)) (by step 6) x [person(x) => y (person(y) ^ father(y, x))] x [~person(x) v y (person(y) ^ father(y, x))] (by step 1) x [~person(x) v (person(f_sk(x)) ^ father(f_sk(x), x))] (by step 3) ~person(x) v (person(f_sk(x)) ^ father(f_sk(x), x)) (by step 4) (~person(x) v person(f_sk(x)) ^ (~person(x) v father(f_sk(x), x)) (by step 5) (~person(x), person(f_sk(x)), (~person(x), father(f_sk(x), x)) (by step 6) (where f_sk(.) is a skolem function) 13
14 .Rules for Unification of two clauses • Basic idea: x P(x) => Q(x), P(a) |– Q(a) (~P(x), Q(x)), (P(a)) {x1/y1, ... xk/yk} where x1, ... xk are variables and x/a} a substitution in which variable x is bound to a (Q(a)) – The goal is to find a set of variable bindings so that the argument lists of two opposite literals (in two clauses) can be made the same. – Only variables can be bound to other things. things 1. a and b cannot be unified (different constants in general refer to different objects) 2. a and f(x) cannot be unified (unless the inverse function of f is known, which is not the case for general functions in FOL) 3. f(x) and g(y) cannot be unified (function symbols f and g in general refer to different functions and their exact definitions are different in different interpretations)
15 .Rules for Unification of two clauses (cont) – Cannot bind variable x to y if x appears anywhere in y • Try to unify x and f(x). If we bind x to f(x) and apply the binding to both x and f(x), we get f(x) and f(f(x)) which are still not the same (and will never be made the same no matter how many times the binding is applied) – Otherwise, bind variable x to y, written as x/y (this guarantees to find the most general unifier, or mgu) • Suppose both x and y are variables, then they can be made the same by binding both of them to any constant c or any function f(.). Such bindings are less general and impose unnecessary restriction on x and y. – To unify two terms of the same function symbol, unify their argument lists (unification is recursive) Ex: to unify f(x) and f(g(b)), we need to unify x and g(b) 15
16 .Rules for Unification of two clauses (cont) – When the argument lists contain multiple terms, unify each pair of terms Ex. To unify (x, f(x), ...) (a, y, ...) 1. unify x and a (x/a}) 2. apply to the remaining terms in both lists, resulting (f(a), ...) and (y, ...) 3. unify f(a) and y with binding y/f(a) 4. apply the new binding y/f(a) to and to the rest of the two lists 5. add y/f(a) to new most general unifier 16
17 . Unification Examples • parents(x, father(x), mother(Bill)) and parents(Bill, father(Bill), y) – unify x and Bill: = {x1/y1, ... xk/yk} where x1, ... xk are variables and x/Bill} – unify father(Bill) and father(Bill): = {x1/y1, ... xk/yk} where x1, ... xk are variables and x/Bill} – unify mother(Bill) and y: = {x1/y1, ... xk/yk} where x1, ... xk are variables and x/Bill}, y/mother(Bill)} • parents(x, father(x), mother(Bill)) and parents(Bill, father(y), z) – unify x and Bill: = {x1/y1, ... xk/yk} where x1, ... xk are variables and x/Bill} – unify father(Bill) and father(y): = {x1/y1, ... xk/yk} where x1, ... xk are variables and x/Bill, y/Bill} – unify mother(Bill) and z: = {x1/y1, ... xk/yk} where x1, ... xk are variables and x/Bill, y/Bill, z/mother(Bill)} • parents(x, father(x), mother(Jane)) and parents(Bill, father(y), mother(y)) – unify x and Bill: = {x1/y1, ... xk/yk} where x1, ... xk are variables and x/Bill} – unify father(Bill) and father(y): = {x1/y1, ... xk/yk} where x1, ... xk are variables and x/Bill, y/Bill} – unify mother(Jane) and mother(Bill): Failure because Jane and Bill are different constants
18 . More Unification Examples • P(x, g(x), h(b)) and P(f(u, a), v, u)) – unify x and f(u, a): = {x1/y1, ... xk/yk} where x1, ... xk are variables and x/ f(u, a)}; remaining lists: (g(f(u, a)), h(b)) and (v, u) – unify g(f(u, a)) and v: = {x1/y1, ... xk/yk} where x1, ... xk are variables and x/f(u, a), v/g(f(u, a))}; remaining lists: (h(b)) and (u) – unify h(b) and u: = {x1/y1, ... xk/yk} where x1, ... xk are variables and x/f(h(b), a), v/g(f(h(b), a)), u/h(b)}; • P(f(x, a), g(x, b)) and P(y, g(y, b)) – unify f(x, a) and y: = {x1/y1, ... xk/yk} where x1, ... xk are variables and y/f(x, a)} remaining lists: (g(x, b)) and (g(f(x, a), b)) – unify x and f(x, a): failure because x is in f(x, a) 18
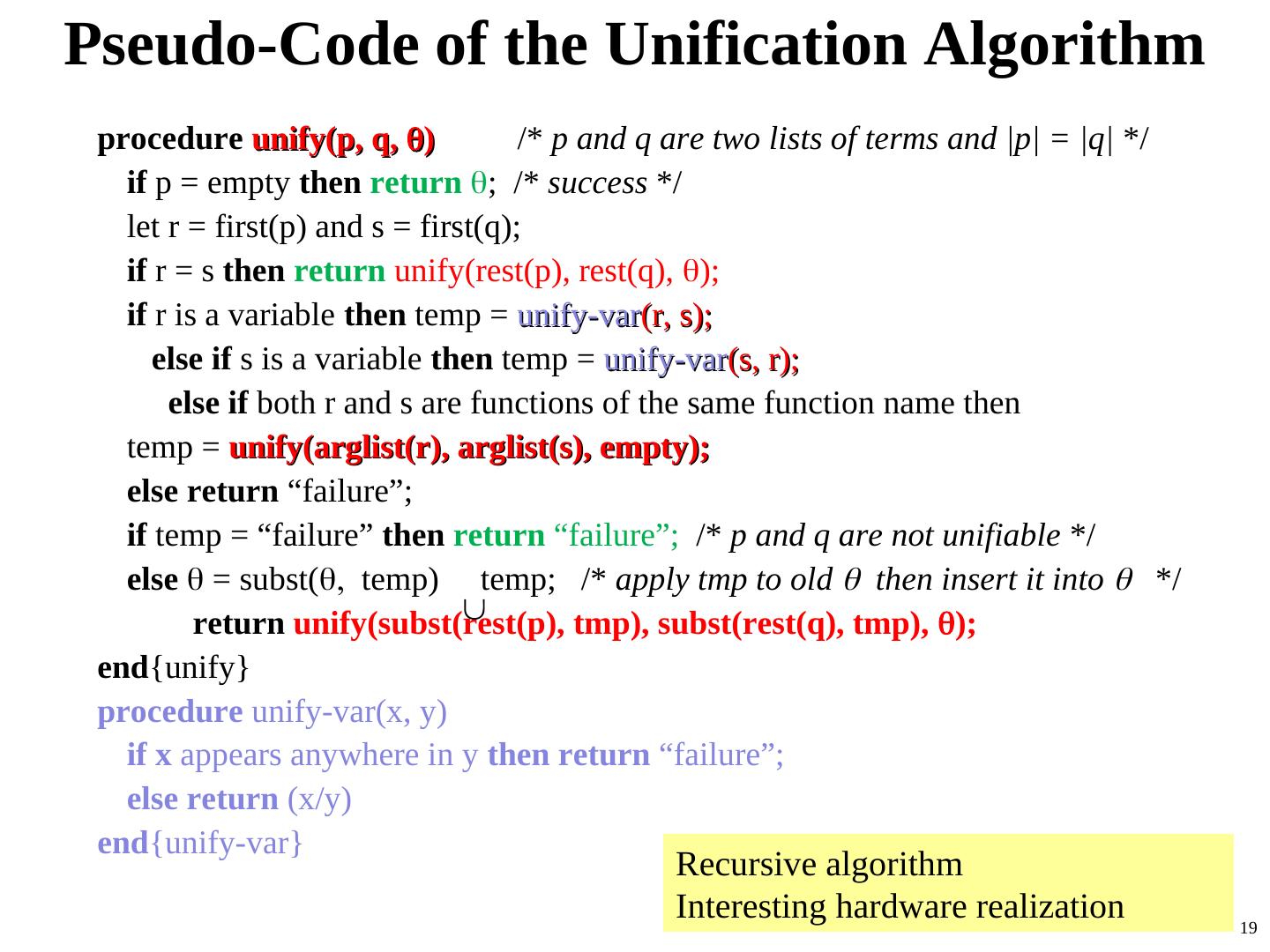
19 .Pseudo-Code of the Unification Algorithm procedure unify(p, q, ) /* p and q are two lists of terms and |p| = |q| */ if p = empty then return ; /* success */ let r = first(p) and s = first(q); if r = s then return unify(rest(p), rest(q), ); if r is a variable then temp = unify-var(r, s); else if s is a variable then temp = unify-var(s, r); else if both r and s are functions of the same function name then temp = unify(arglist(r), arglist(s), empty); else return “failure”; if temp = “failure” then return “failure”; /* p and q are not unifiable */ else = subst(temp) temp; /* apply tmp to old then insert it into */ return unify(subst(rest(p), tmp), subst(rest(q), tmp), ); end{x1/y1, ... xk/yk} where x1, ... xk are variables and unify} procedure unify-var(x, y) if x appears anywhere in y then return “failure”; else return (x/y) end{x1/y1, ... xk/yk} where x1, ... xk are variables and unify-var} Recursive algorithm Interesting hardware realization 19
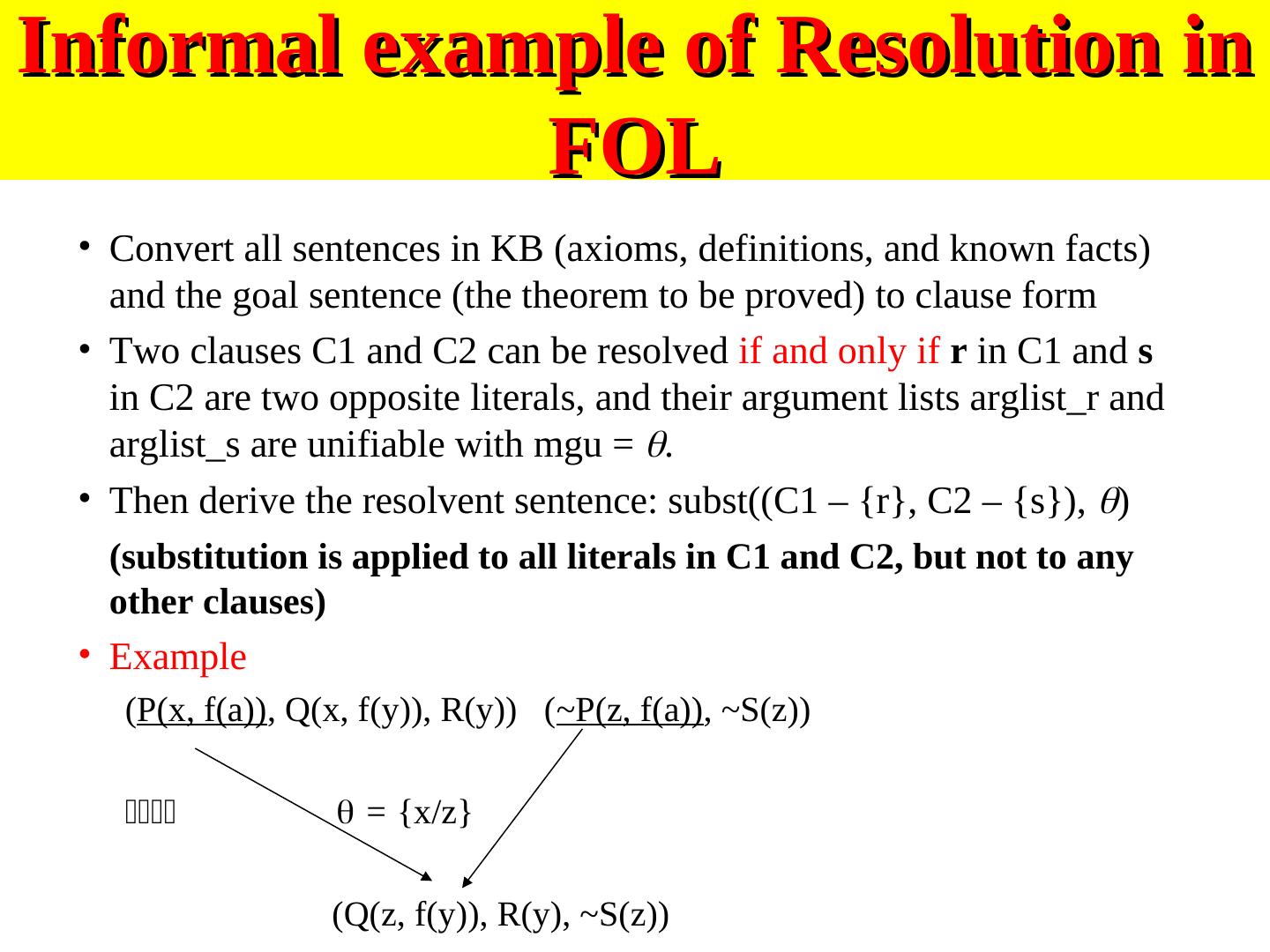
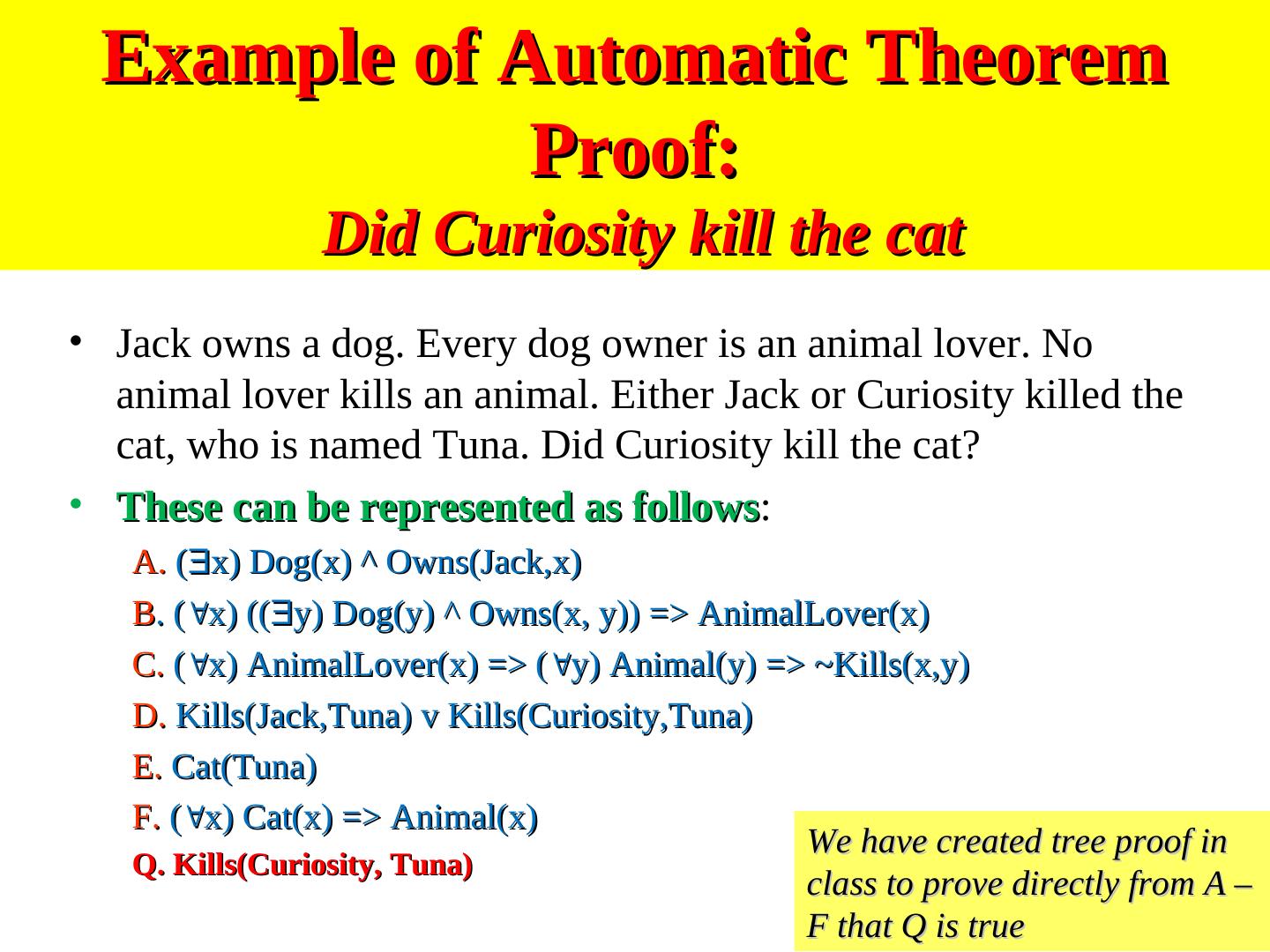
20 .Informal example of Resolution in FOL • Convert all sentences in KB (axioms, definitions, and known facts) and the goal sentence (the theorem to be proved) to clause form • Two clauses C1 and C2 can be resolved if and only if r in C1 and s in C2 are two opposite literals, and their argument lists arglist_r and arglist_s are unifiable with mgu = . • Then derive the resolvent sentence: subst((C1 – {x1/y1, ... xk/yk} where x1, ... xk are variables and r}, C2 – {x1/y1, ... xk/yk} where x1, ... xk are variables and s}), ) (substitution is applied to all literals in C1 and C2, but not to any other clauses) • Example (P(x, f(a)), Q(x, f(y)), R(y)) (~P(z, f(a)), ~S(z)) = {x1/y1, ... xk/yk} where x1, ... xk are variables and x/z} (Q(z, f(y)), R(y), ~S(z))
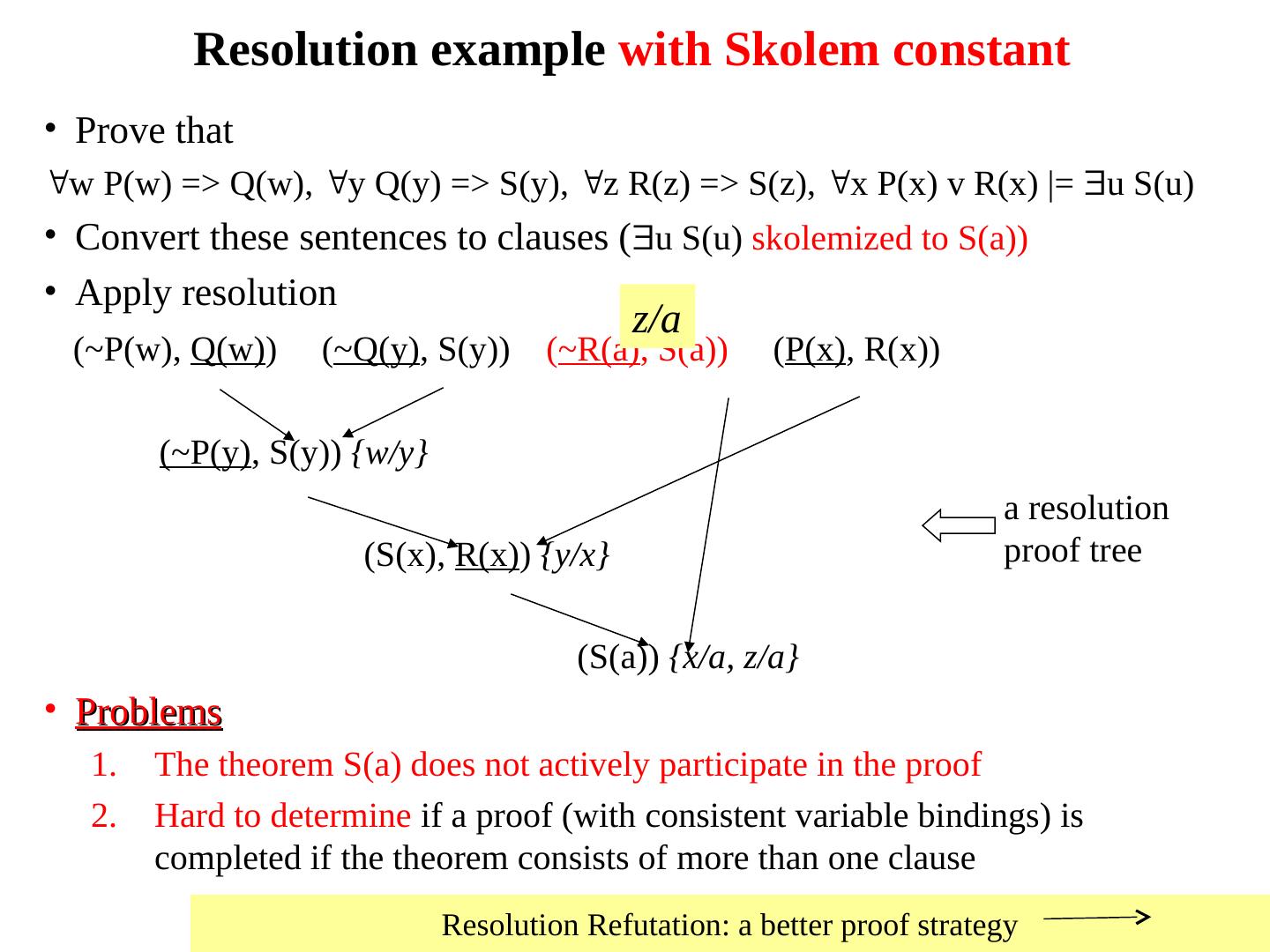
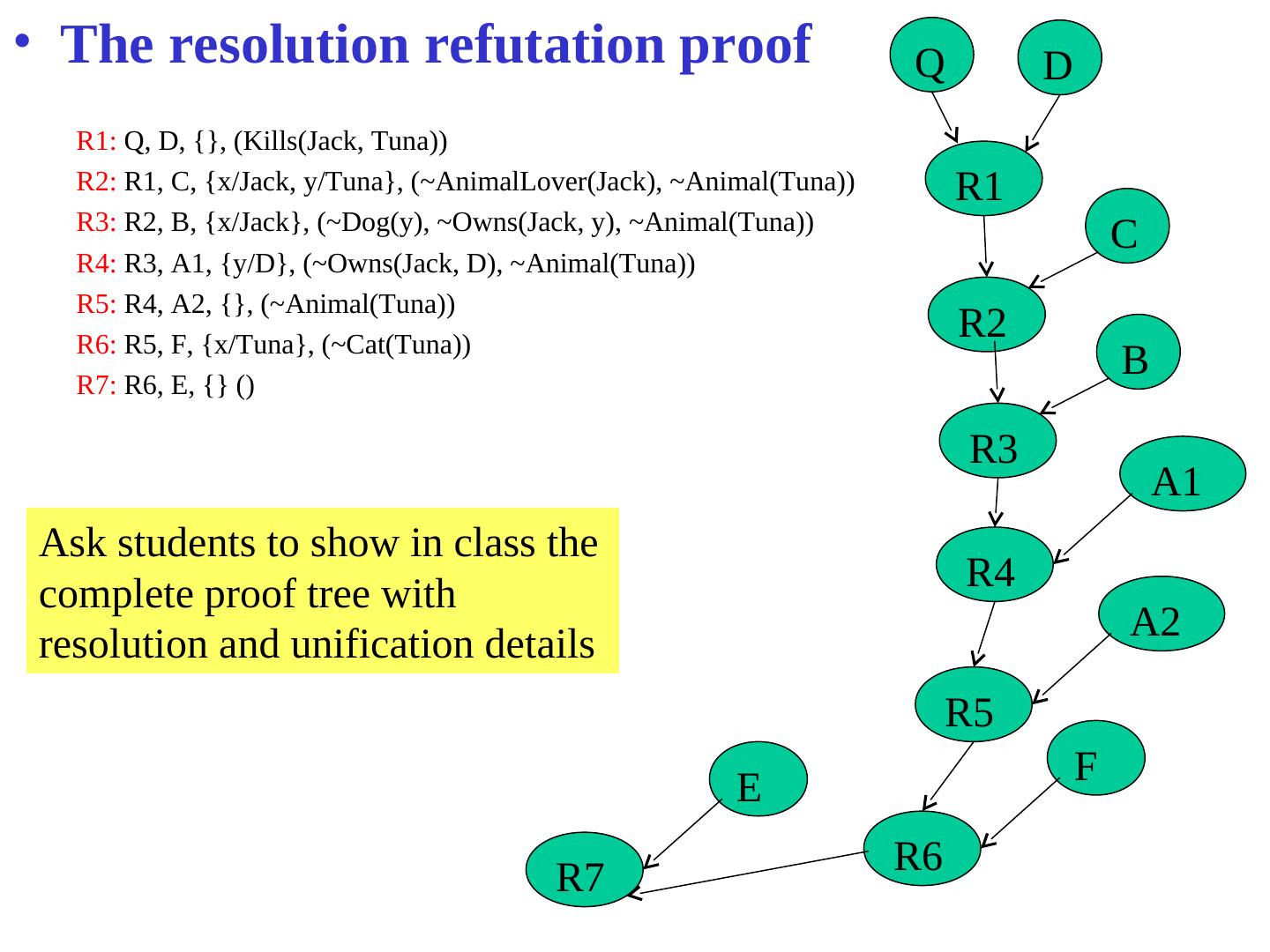
21 . Resolution example with Skolem constant • Prove that w P(w) => Q(w), y Q(y) => S(y), z R(z) => S(z), x P(x) v R(x) |= u S(u) • Convert these sentences to clauses (u S(u) skolemized to S(a)) • Apply resolution z/a (~P(w), Q(w)) (~Q(y), S(y)) (~R(a), S(a)) (P(x), R(x)) (~P(y), S(y)) {w/y} a resolution (S(x), R(x)) {y/x} proof tree (S(a)) {x/a, z/a} • Problems 1. The theorem S(a) does not actively participate in the proof 2. Hard to determine if a proof (with consistent variable bindings) is completed if the theorem consists of more than one clause Resolution Refutation: a better proof strategy 21
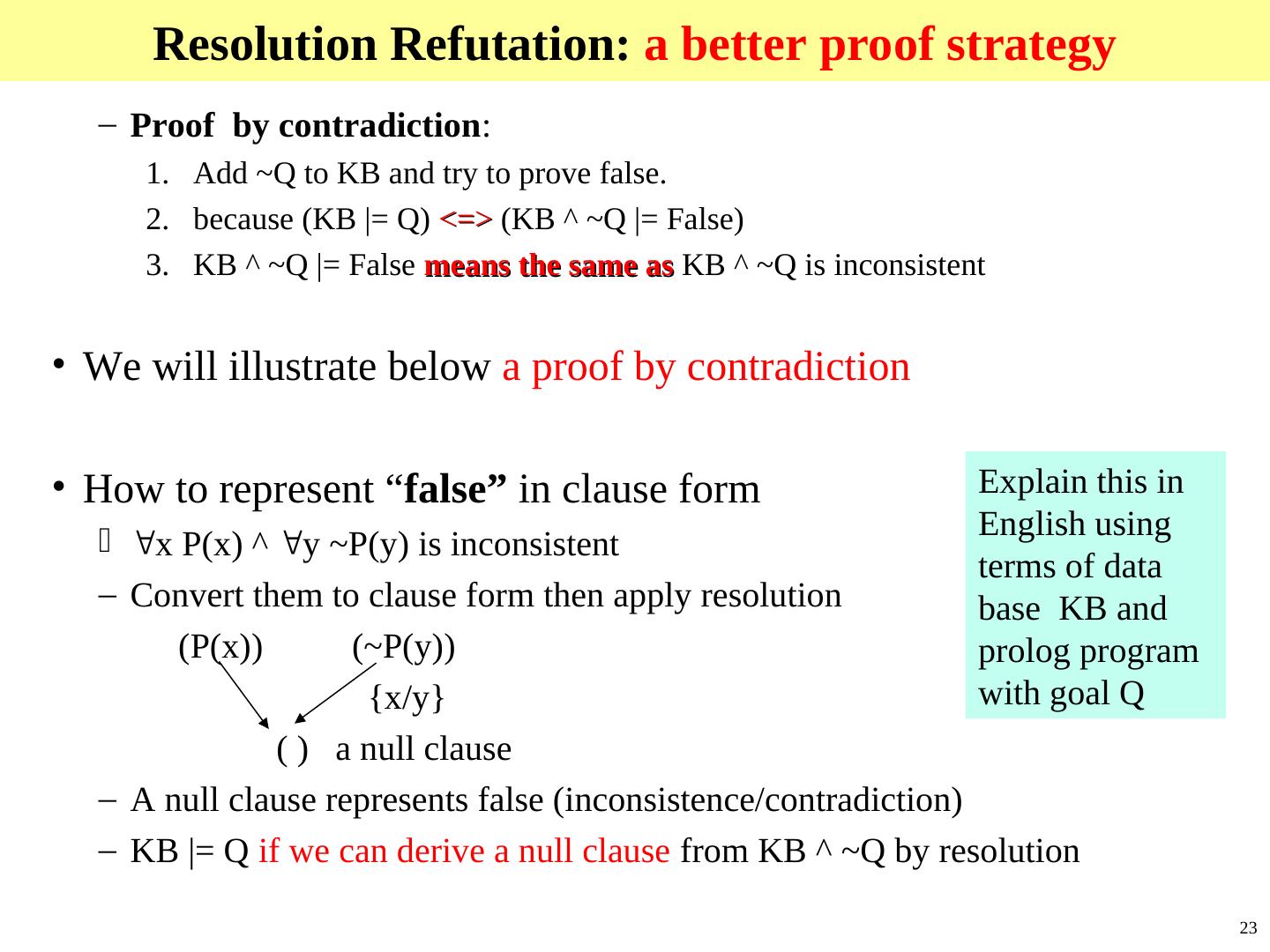
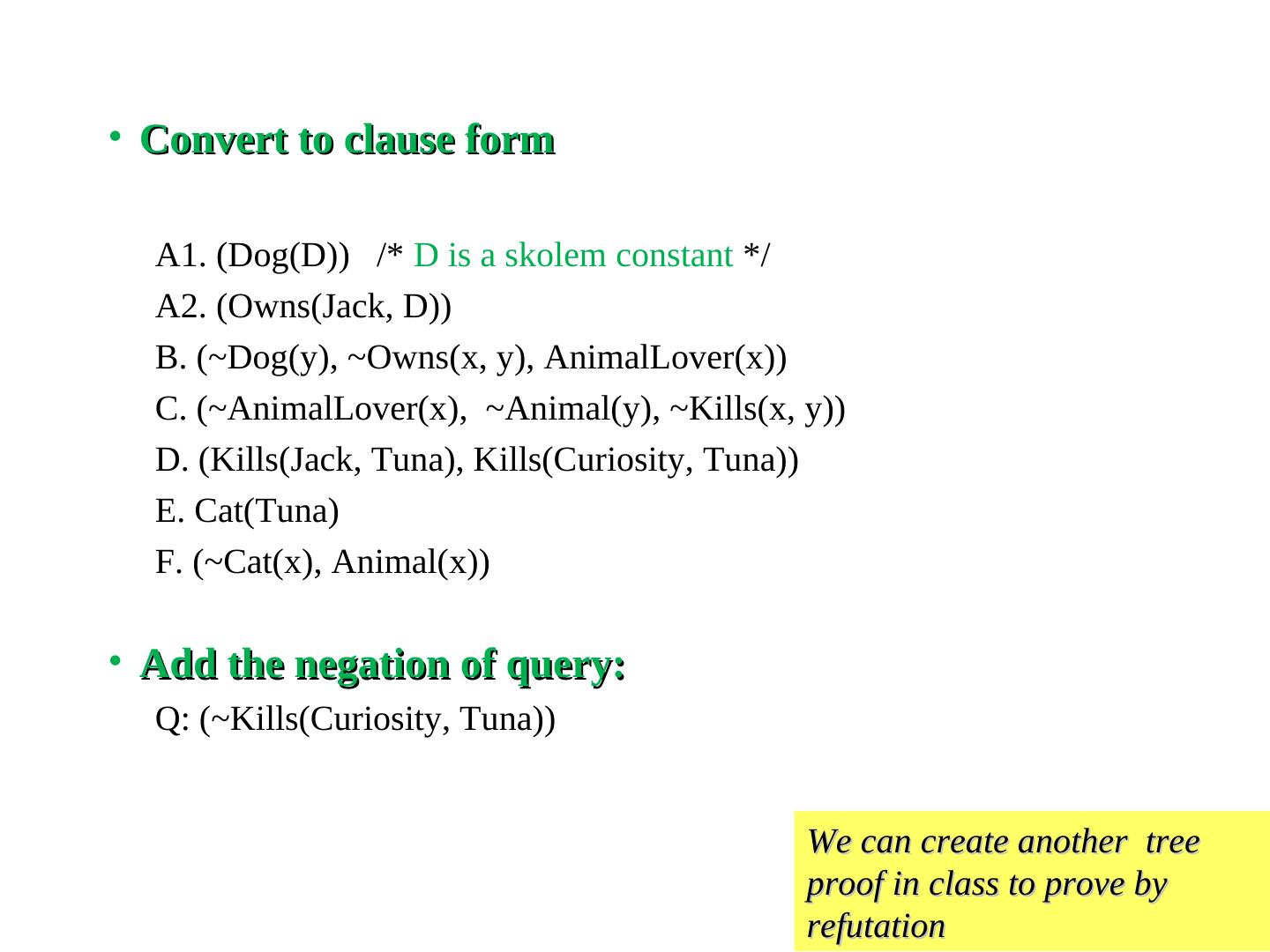
22 . Resolution Refutation: a better proof strategy • We want: – Given a consistent set of axioms KB and goal sentence Q, show that KB |= Q. • We do: – Proof by contradiction: 1. Add ~Q to KB and try to prove false. 2. because (KB |= Q) <=> (KB ^ ~Q |= False) 3. KB ^ ~Q |= False means the same as KB ^ ~Q is inconsistent • We will illustrate proof by contradiction • “false” in clause form is represented by null (empty) clause 22
23 . Resolution Refutation: a better proof strategy – Proof by contradiction: 1. Add ~Q to KB and try to prove false. 2. because (KB |= Q) <=> (KB ^ ~Q |= False) 3. KB ^ ~Q |= False means the same as KB ^ ~Q is inconsistent • We will illustrate below a proof by contradiction • How to represent “false” in clause form Explain this in x P(x) ^ y ~P(y) is inconsistent English using terms of data – Convert them to clause form then apply resolution base KB and (P(x)) (~P(y)) prolog program with goal Q {x1/y1, ... xk/yk} where x1, ... xk are variables and x/y} ( ) a null clause – A null clause represents false (inconsistence/contradiction) – KB |= Q if we can derive a null clause from KB ^ ~Q by resolution 23
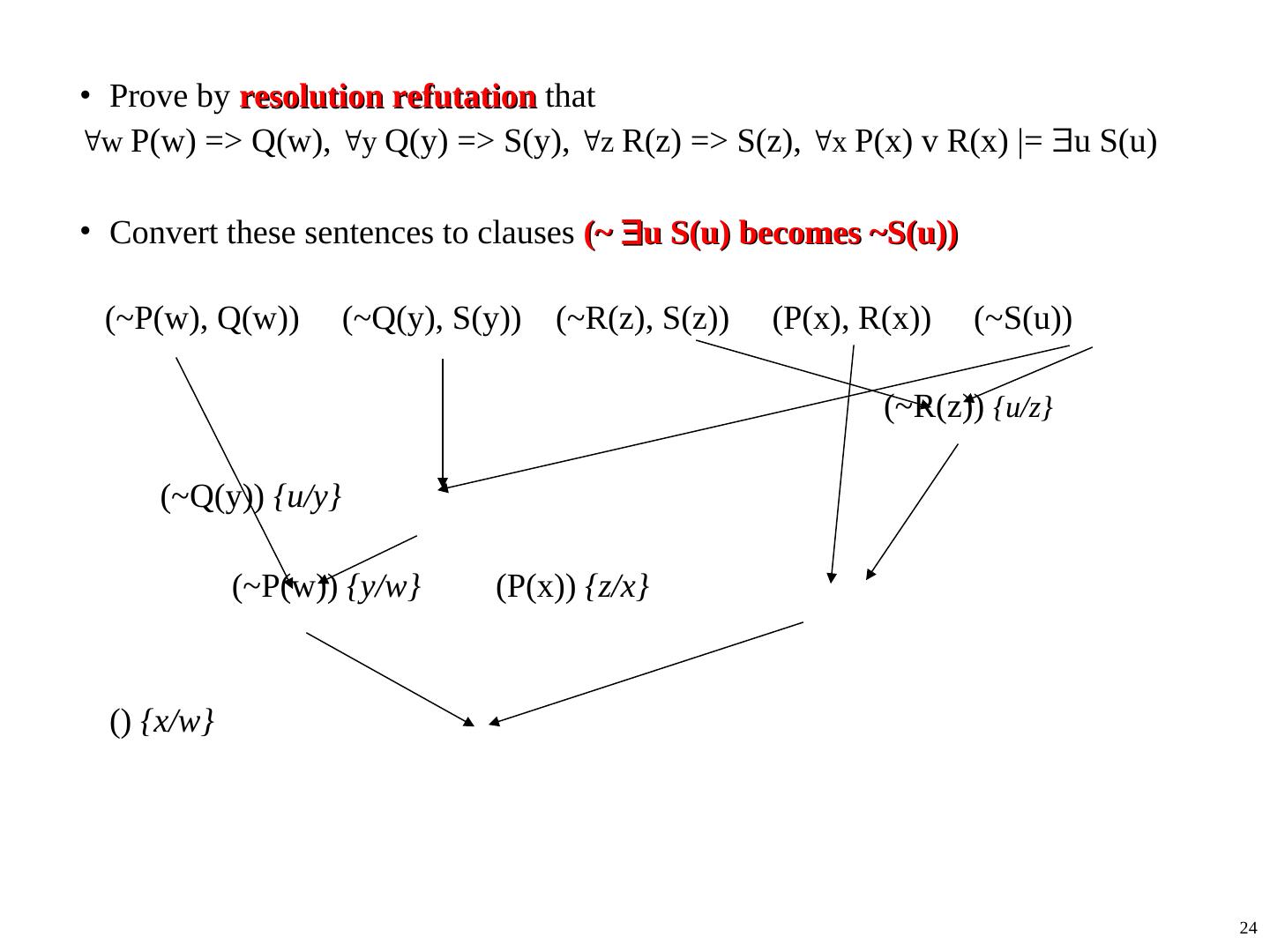
24 .• Prove by resolution refutation that w P(w) => Q(w), y Q(y) => S(y), z R(z) => S(z), x P(x) v R(x) |= u S(u) • Convert these sentences to clauses (~ u S(u) becomes ~S(u)) (~P(w), Q(w)) (~Q(y), S(y)) (~R(z), S(z)) (P(x), R(x)) (~S(u)) (~R(z)) {u/z} (~Q(y)) {u/y} (~P(w)) {y/w} (P(x)) {z/x} () {x/w} 24
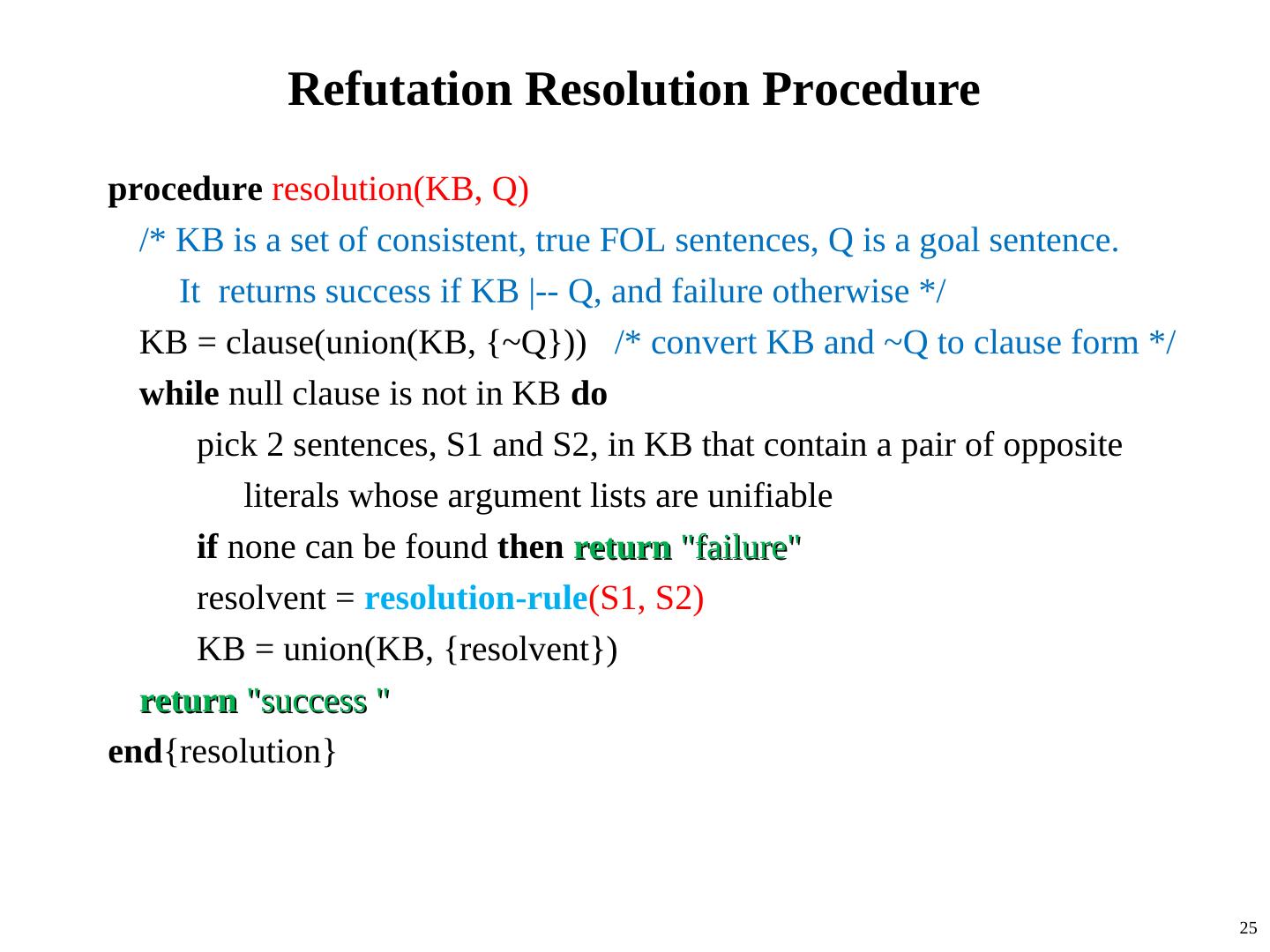
25 . Refutation Resolution Procedure procedure resolution(KB, Q) /* KB is a set of consistent, true FOL sentences, Q is a goal sentence. It returns success if KB |-- Q, and failure otherwise */ KB = clause(union(KB, {x1/y1, ... xk/yk} where x1, ... xk are variables and ~Q})) /* convert KB and ~Q to clause form */ while null clause is not in KB do pick 2 sentences, S1 and S2, in KB that contain a pair of opposite literals whose argument lists are unifiable if none can be found then return "failure" resolvent = resolution-rule(S1, S2) KB = union(KB, {x1/y1, ... xk/yk} where x1, ... xk are variables and resolvent}) return "success " end{x1/y1, ... xk/yk} where x1, ... xk are variables and resolution} 25
26 . Control Strategies for Resolution • At any given time, there are multiple pairs of clauses that are resolvable. • Therefore, we need a systematic way to select one such pair at each step of proof 1. May lead to a null clause 2. Without losing potentially good threads (of inference) • There are a number of general (domain independent) strategies that are useful in controlling a resolution theorem prover. • We’ll briefly look at the following resolution strategies: 1. Breadth first 2. Set of support 3. Unit resolution 4. Input Resolution 5. Ordered resolution 6. Subsumption 26
27 . Breadth first resolution strategy 1.Level 0 clauses are those from the original KB and the negation of the goal. 2.Level k clauses are the resolvents computed from two clauses, one of which must be from level k-1 and the other from any earlier level. 3.Compute all level 1 clauses possible, then all possible level 2 clauses, etc. 4.Complete, but very inefficient. inefficient 27
28 . Set of Support Resolution Strategy 1.At least one parent clause must be from the negation of the goal or one of the "descendents" of such a goal clause (i.e., derived from a goal clause). 2.Complete (assuming all possible set-of-support clauses are derived) 3.Gives a goal directed character to the search 28
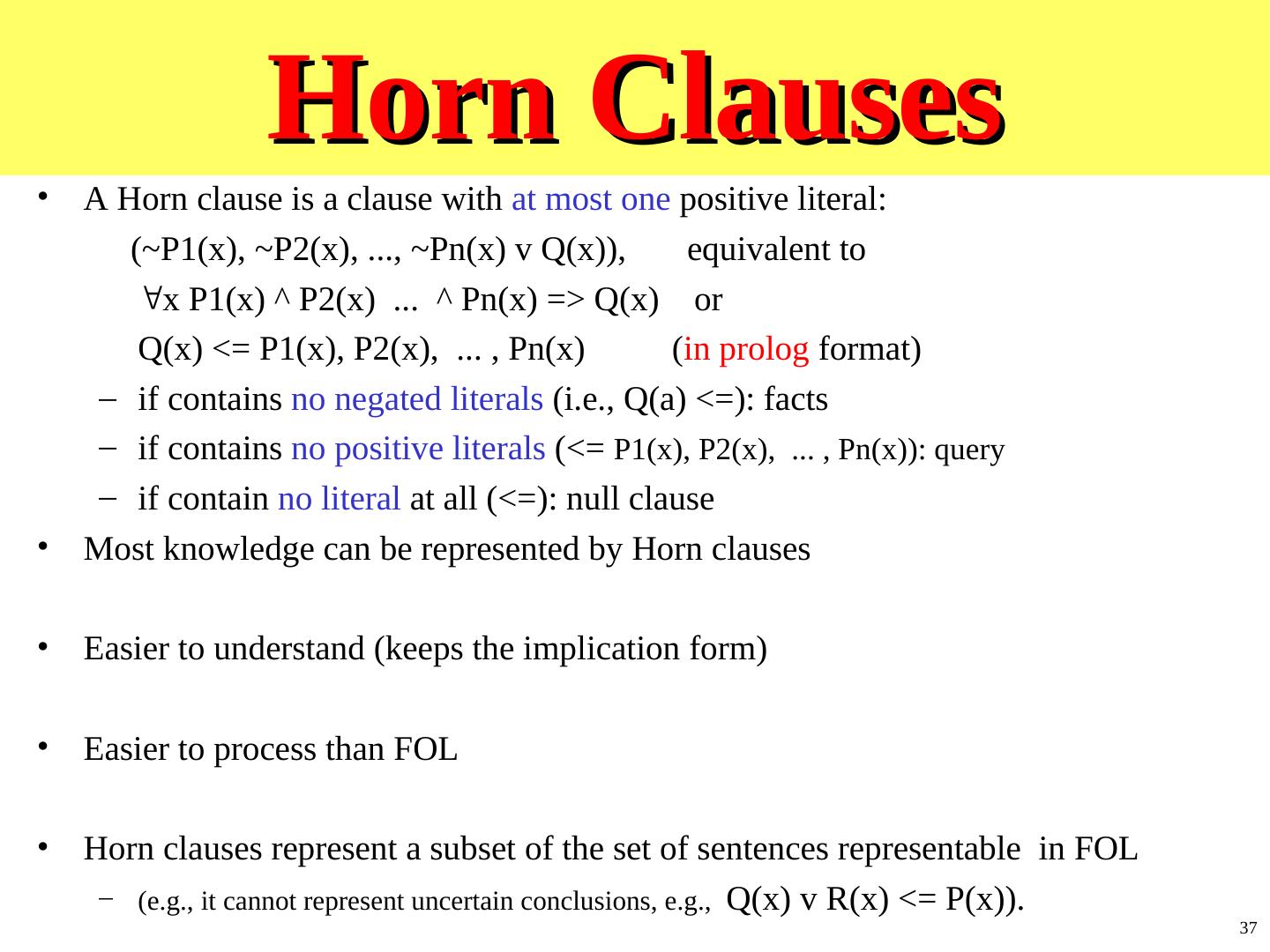
29 . Unit Resolution Strategy 1.At least one parent clause must be a "unit clause," i.e., a clause containing a single literal. 2.Not complete in general 3.But complete for Horn clause KBs 29
3秒后跳转登录页面
去登陆

