展开查看详情
2 .Very Simple Chain Theory
16 32
Let us start with a very simple
example
�
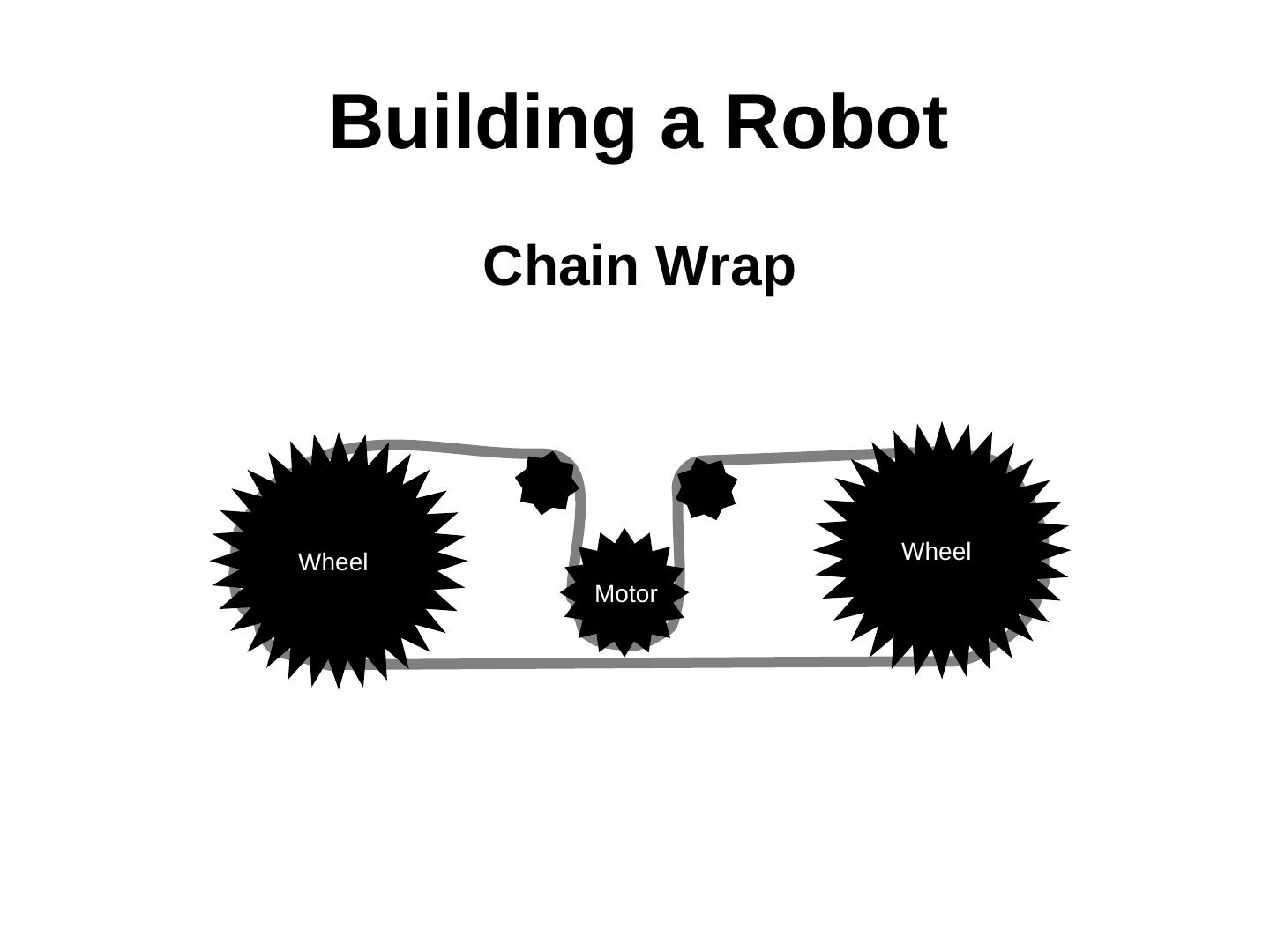
3 .Building a Robot
Chain Theory
16 32
�
4 .Building a Robot
Chain Theory
16 32
�
5 .Building a Robot
Chain Theory
16 32
�
6 .Building a Robot
Chain Theory
16 32
�
7 .Building a Robot
Chain Theory
16 32
�
8 .Building a Robot
Chain Theory
16 32
�
9 .Building a Robot
Chain Theory
16 32
�
10 .Building a Robot
Chain Theory
16 32
�
11 .Building a Robot
Chain Theory
16 32
�
12 .Building a Robot
Chain Theory
16 32
�
13 .Building a Robot
Chain Theory
16 32
�
14 .Building a Robot
Chain Theory
16 32
�
15 .Building a Robot
Chain Theory
16 32
�
16 .Building a Robot
Chain Theory
16 32
�
17 .Building a Robot
Chain Theory
16 32
�
18 .Building a Robot
Chain Theory
16 32
�
19 .Building a Robot
Chain Theory
16 32
�
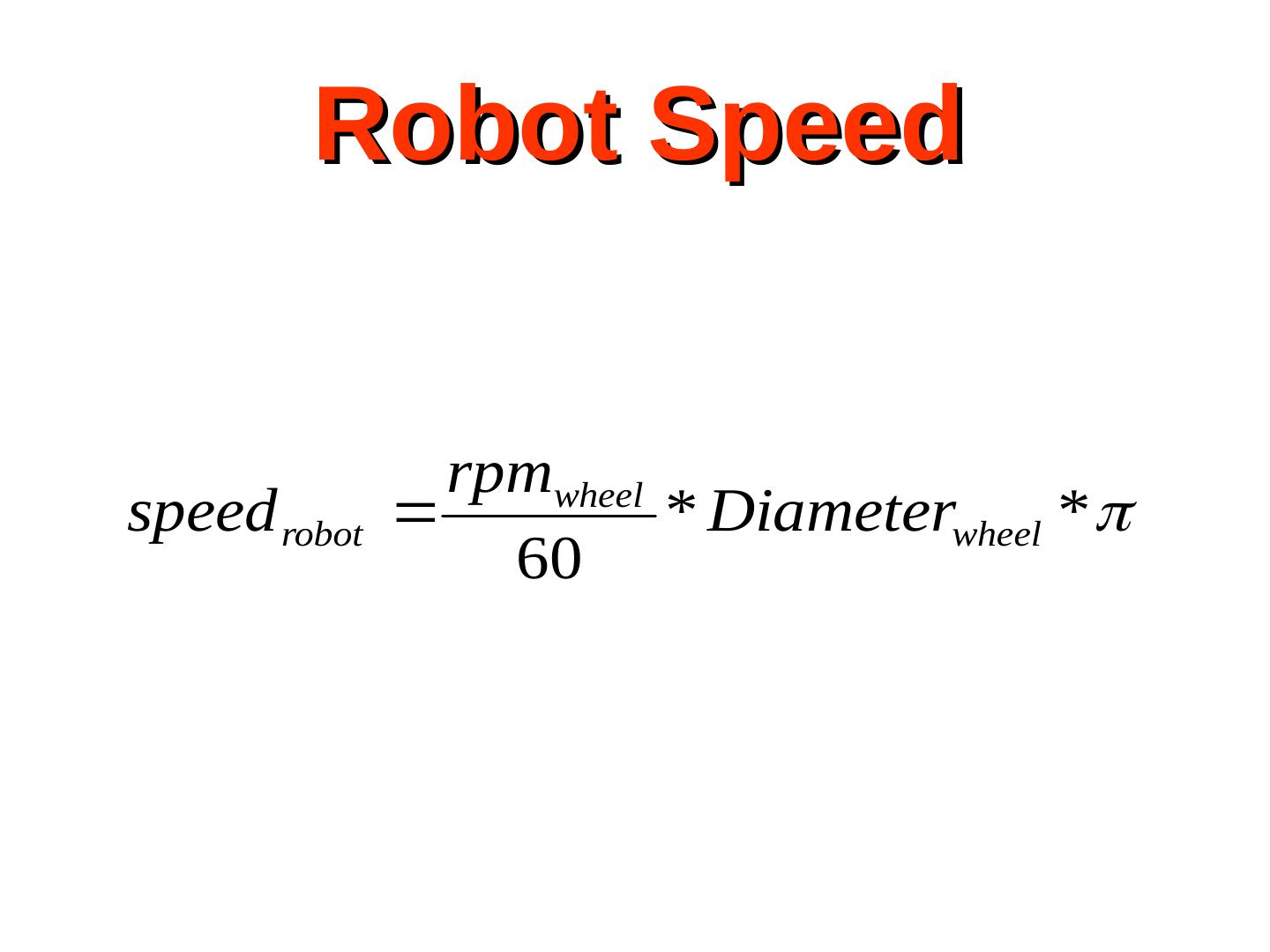
20 . The Effect on Speed
1. When gears are combined, there is also an
effect on the output speed.
2. To measure speed we are interested in the
circumference of the gear, C= 2 r.
3. If the circumference of Gear1 is twice that of
Gear2, then Gear2 must turn twice for each full
rotation of Gear1.
4. => Gear2 must turn twice as fast to keep up
with Gear1.
�
21 . Gearing Law for Speed
• If the output gear is larger than the
input gear, the speed decreases.
• If the output gear is smaller than the
input gear, the speed increases.
• => Gearing up decreases speed
• => Gearing down increases speed
�
22 .Gearing Laws
rpmoutput rpminput * ?
torqueoutput torqueinput * ?
�
23 .Gearing Law for Speed
teethinput
rpmoutput rpminput *
teethoutput
torqueoutput torqueinput * ?
• These are all important when
you are building a robot
�
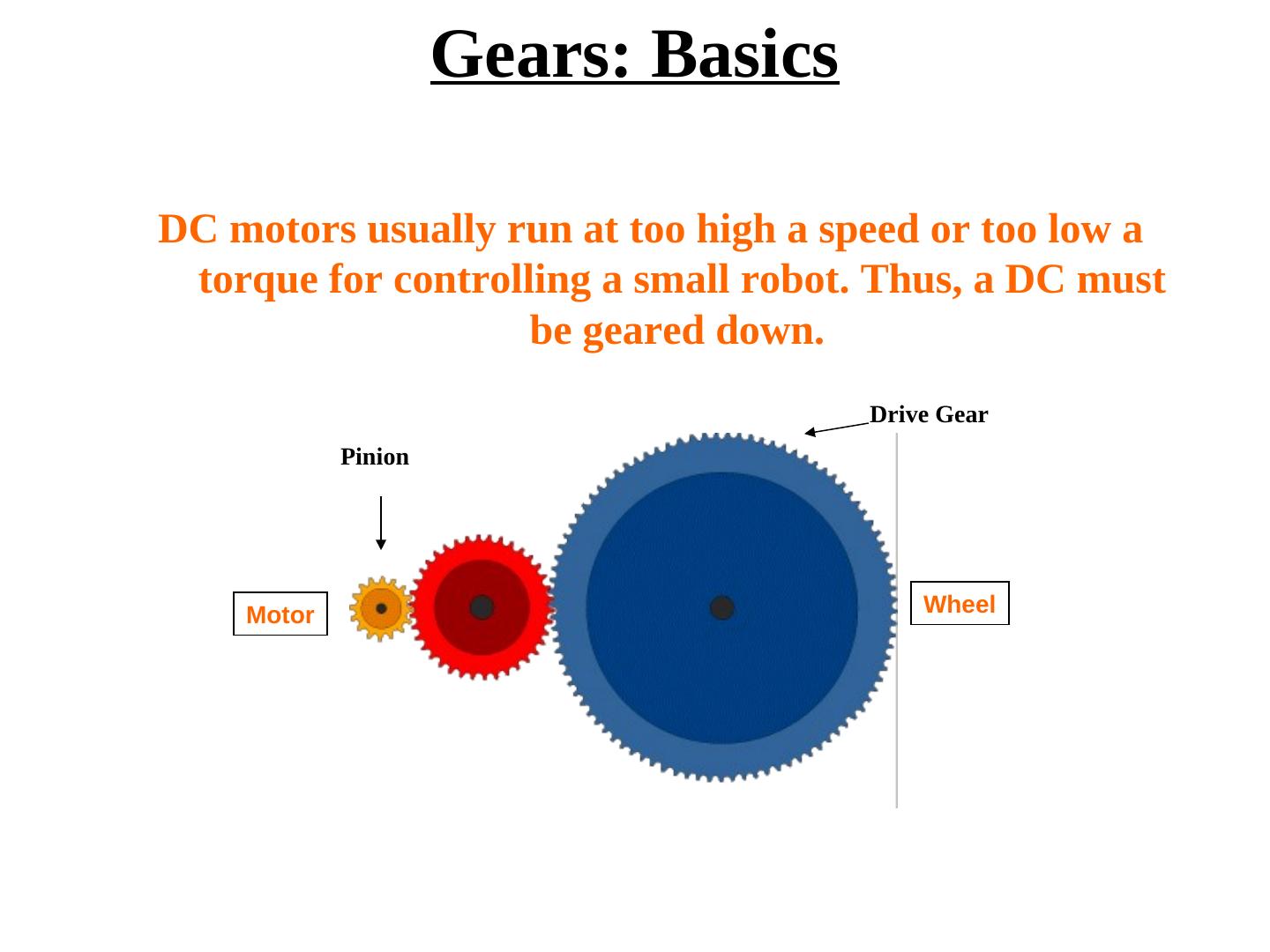
24 . Gearing in robots
1. Gears are used to alter the
output torque of a motor. force
F=T/ r
2. The force generated at the
edge of a gear is equal to the
ratio the torque and the radius r
of the gear (T = F r), in the line
tangential to its circumference.
T=Fr
3. This is the underlying law
behind gearing mechanisms.
�
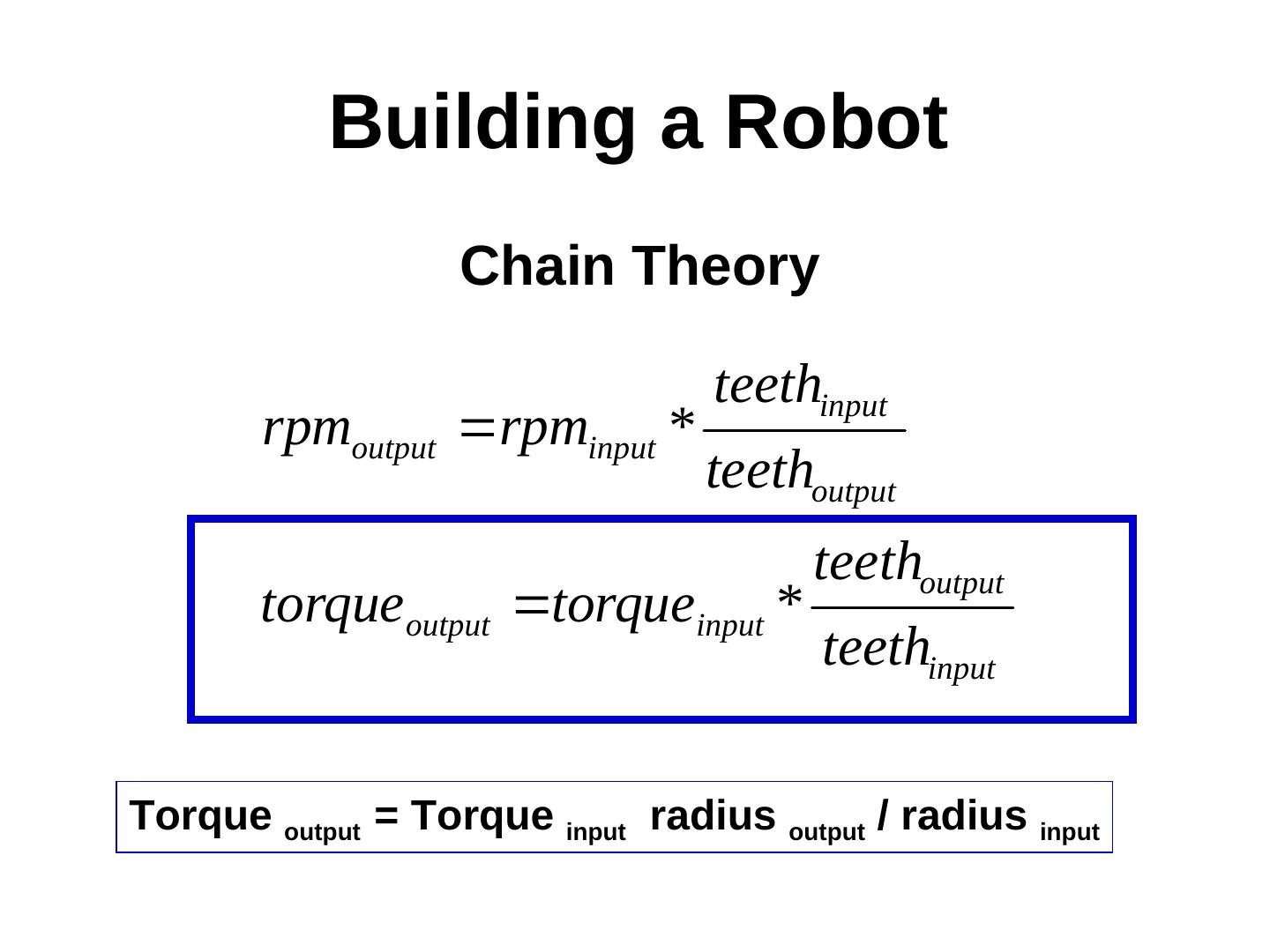
25 . Building a Robot
Chain Theory
teethinput
rpmoutput rpminput *
teethoutput
teethoutput
torqueoutput torqueinput *
teethinput
Torque output = Torque input radius output / radius input
�
26 . Gear Radii and Force/Torque
1. By combining gears with different
radii, we can manipulate the
amount of force/torque the
mechanism generates.
2. The relationship between the radii
and the resulting torque is well
defined
3. The torque generated at the output
gear is proportional to the torque
on the input gear and the ratio of
the two gear's radii.
�
27 . Example of Gearing
1. Suppose Gear1 with radius r1 turns
with torque t1, generating a force of torque t1
t1/r1 perpendicular to its r1
circumference.
force of t1/r1
2. If we mesh it with Gear2, with r2,
which generates t2/r2,
then t1/r1 = t2/r2 r2
1. To get the torque generated by
Gear2, we get: t2 = t1 r2/r1
2. If r2 > r1, we get a bigger torque,
3. if r1 > r2, we get a smaller torque. Forces are equal
�
28 . Gearing Law for Torque
1. If the output gear is larger than the
input gear, the torque increases.
2. If the output gear is smaller than
the input gear, the torque
decreases.
3. => Gearing up increases torque
4. => Gearing down decreases torque
�
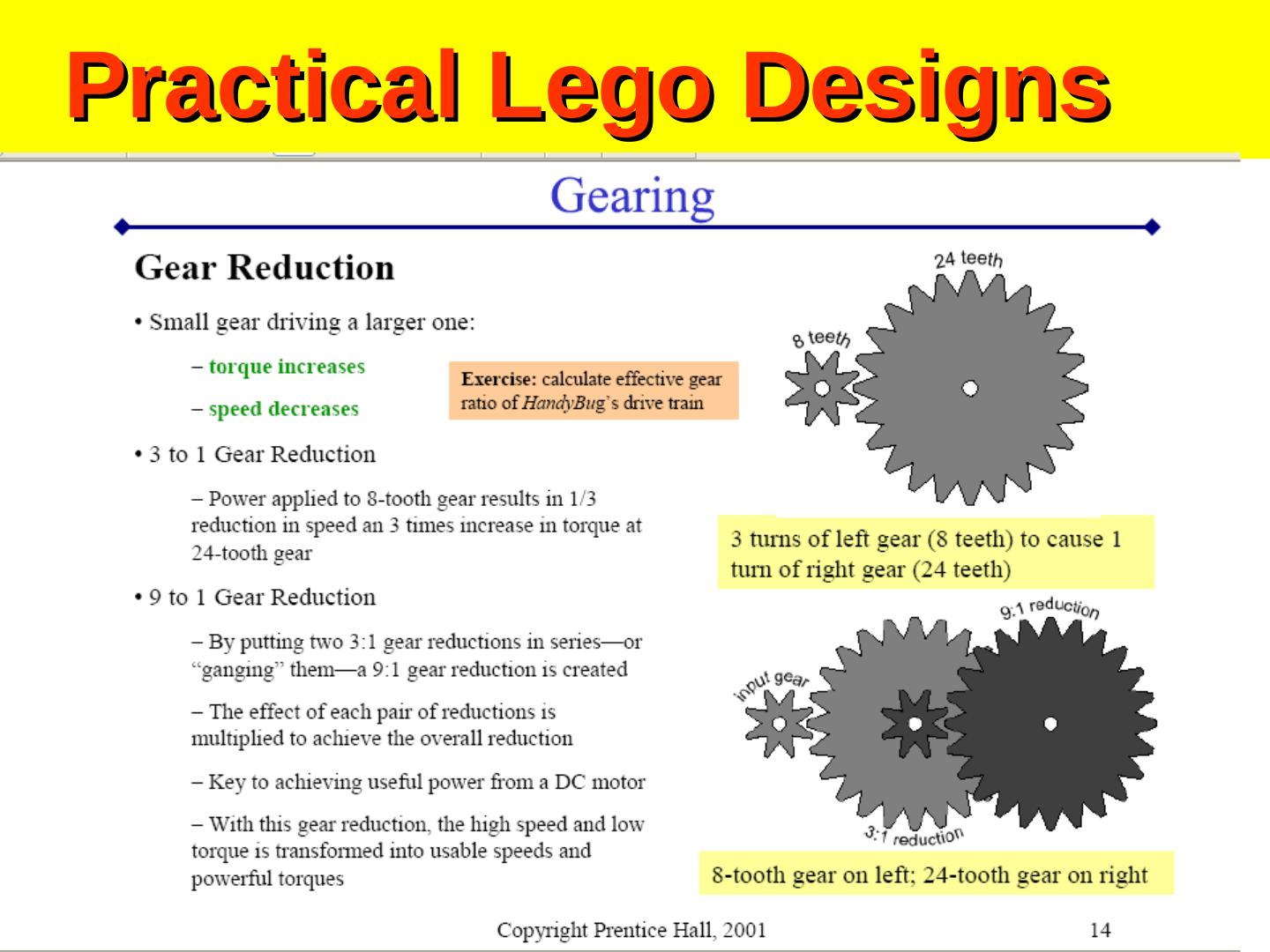
29 . Exchanging Speed for Torque
• When a small gear drives a large one,
torque is increased and speed is
decreased. Analogously, when a large
gear drives a small one, torque is
decreased and speed is increased.
• Gears are used in DC motors (which are
fast and have low torque) to trade off
extra speed for additional torque.
• How?
�