Robots with four wheels
分享
点赞
3
收藏
1
下载 0
-
快召唤伙伴们来围观吧
-
微博
QQ
QQ空间
贴吧
-
文档嵌入链接
- 复制
-
-
微信扫一扫分享
-
已成功复制到剪贴板
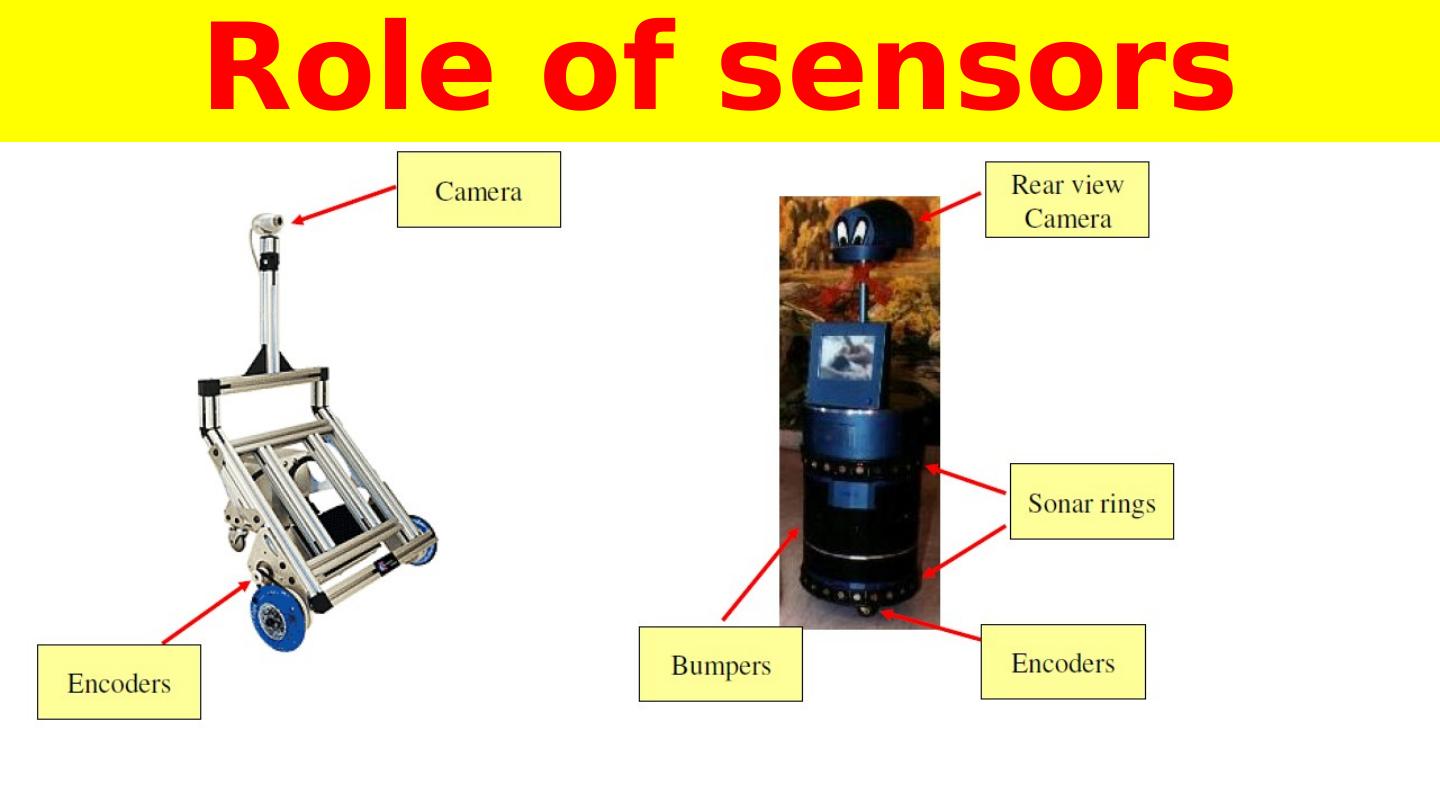
Sensors are an important part of a mobile robot
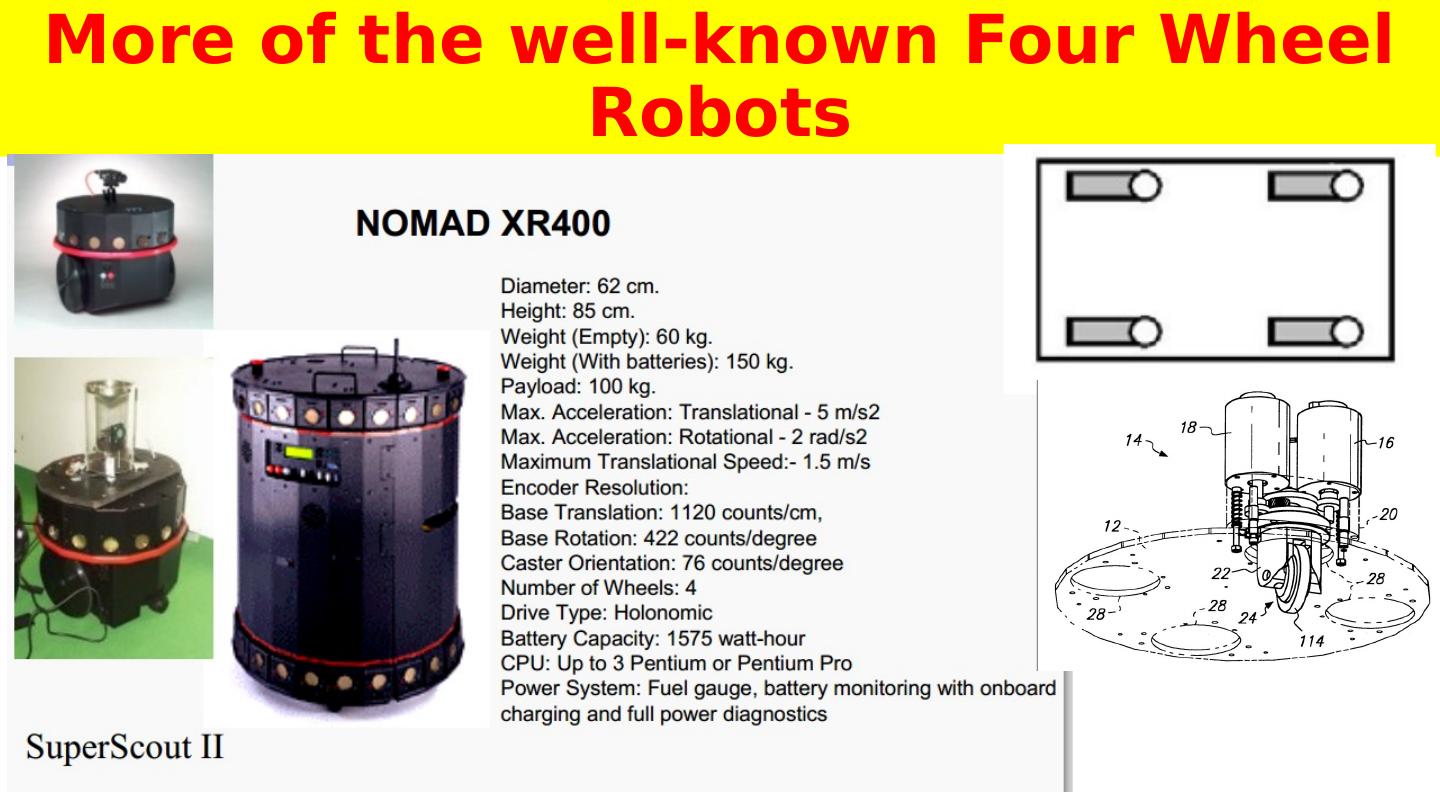
More of the well-known Four Wheel Robots
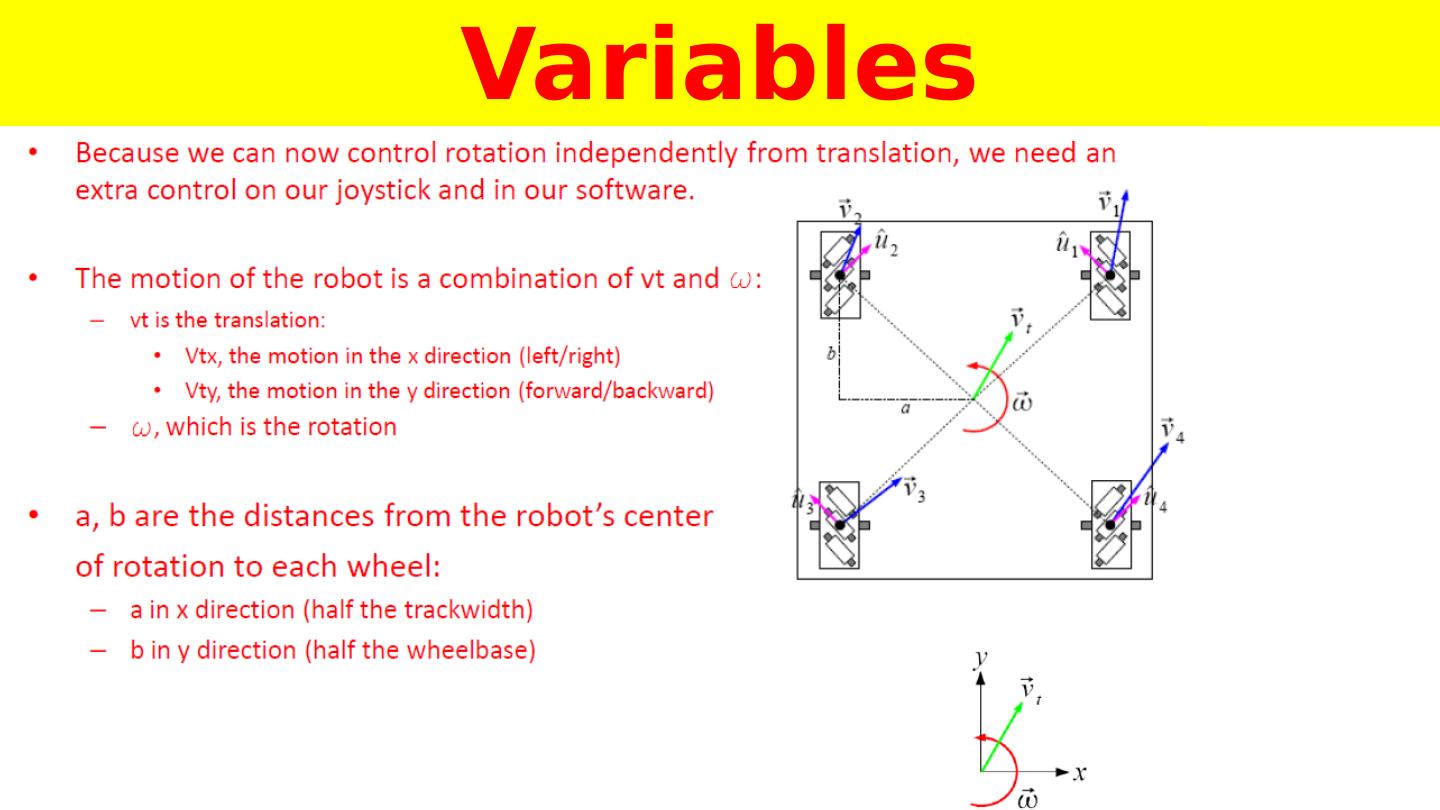
Mecanum Wheel Control Variables
展开查看详情
1 .Robots with four wheels Drive forward or back wheels Drive and turn both forward and back wheels
2 .Sensors are an important part of a mobile robot
3 .Four wheeled robots Four standard wheels controlled in pairs in the skid steering system
5 .More of the well-known Four Wheel Robots
6 .Four wheels = Mecanum Wheels Uranus CMU Mister Jeeves PSU
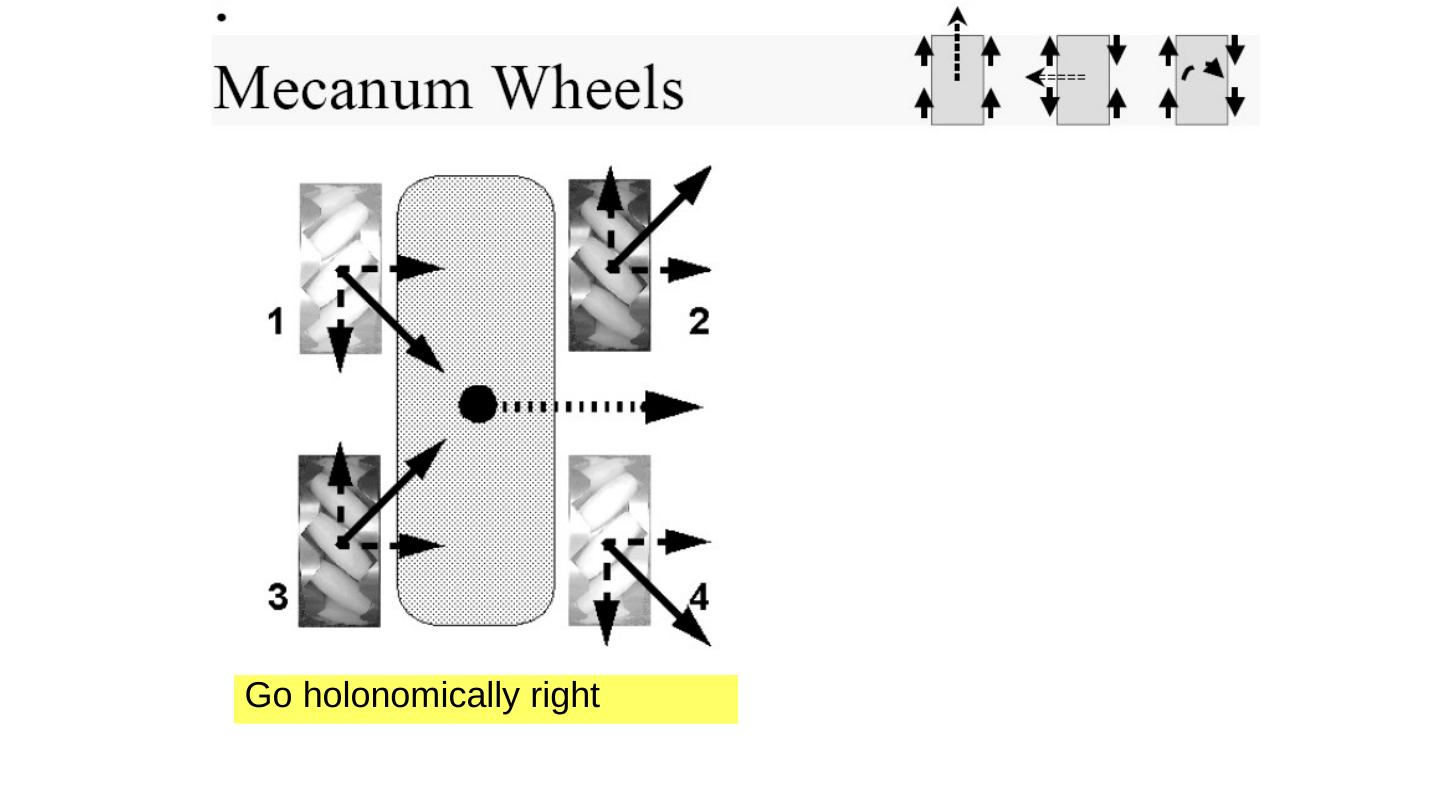
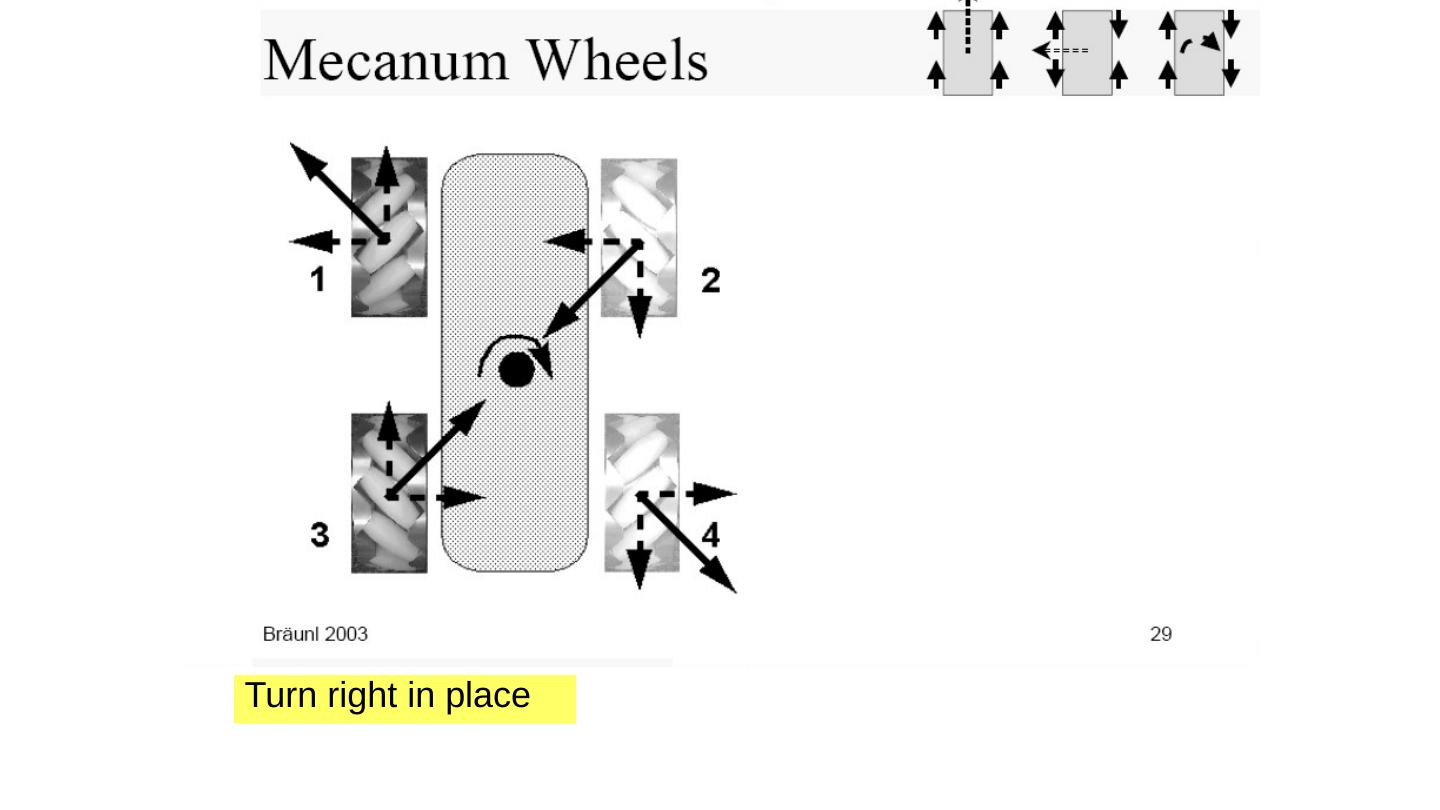
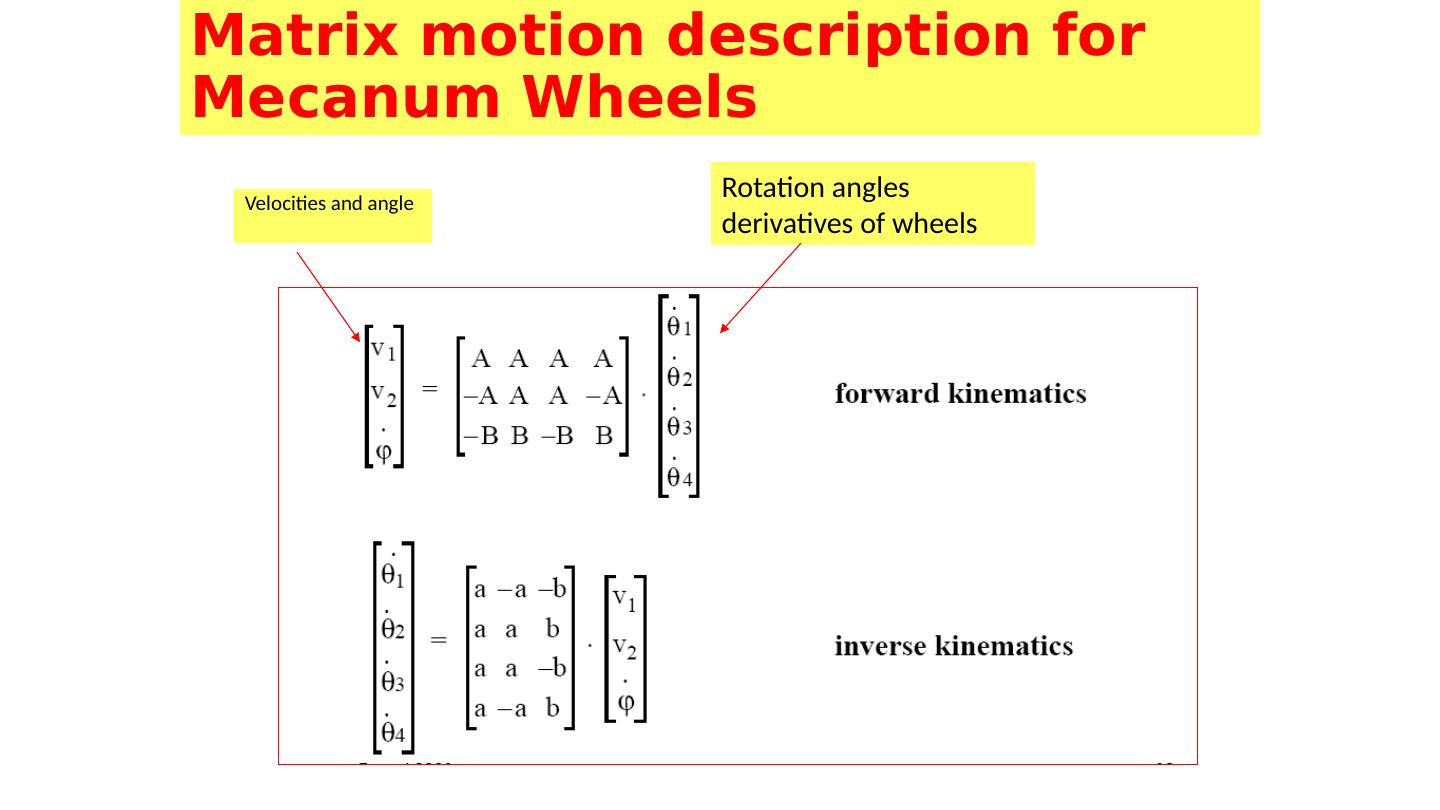
7 .Mecanum Wheel Control Variables
8 .Mecanum Wheel Control Variables
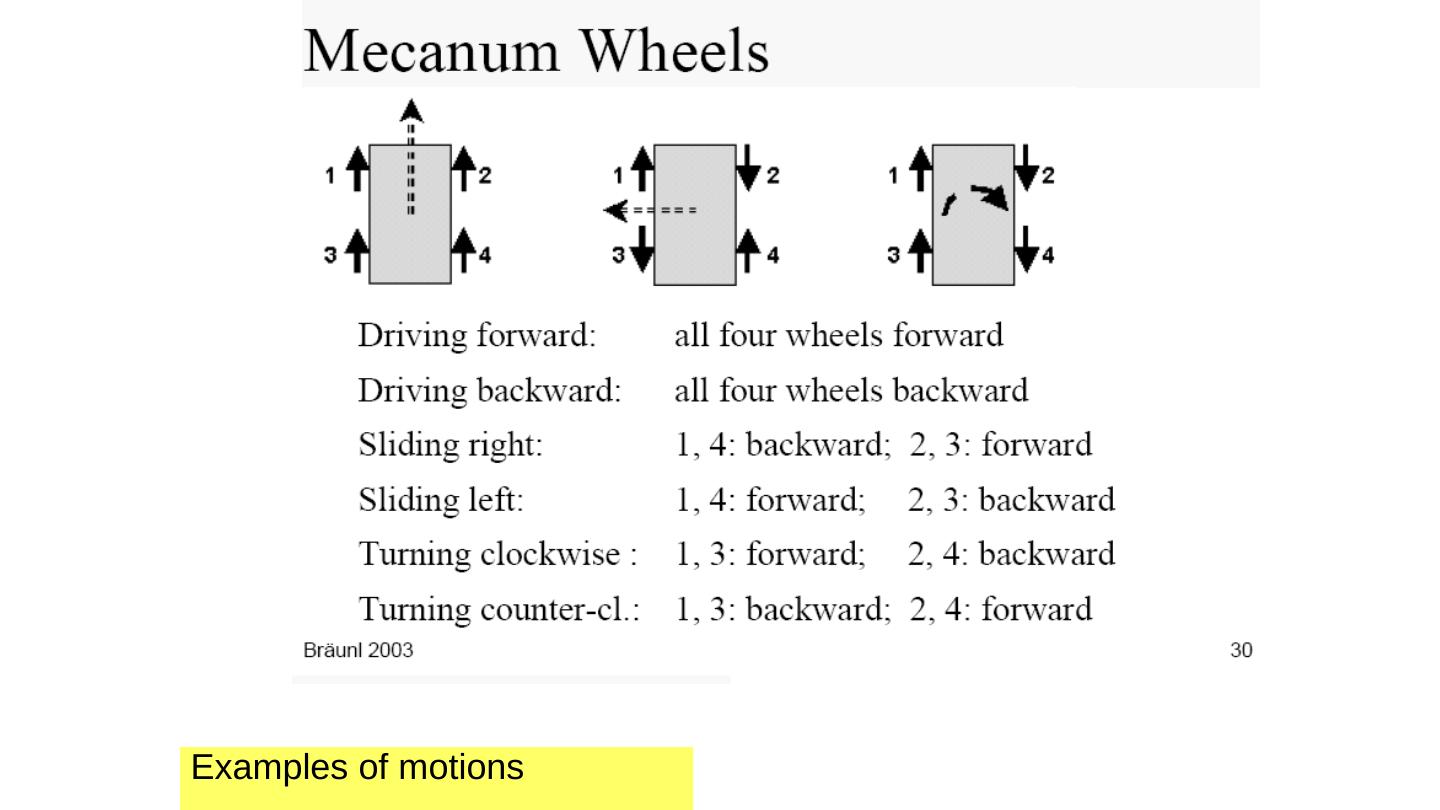
9 .Omni-Directional Vehicles Most vehicles are non-holonomic this means they cannot drive in all directions E.g. a differential-drive vehicle cannot drive in the direction of its wheel axis Holonomic vehicles can drive in any possible direction
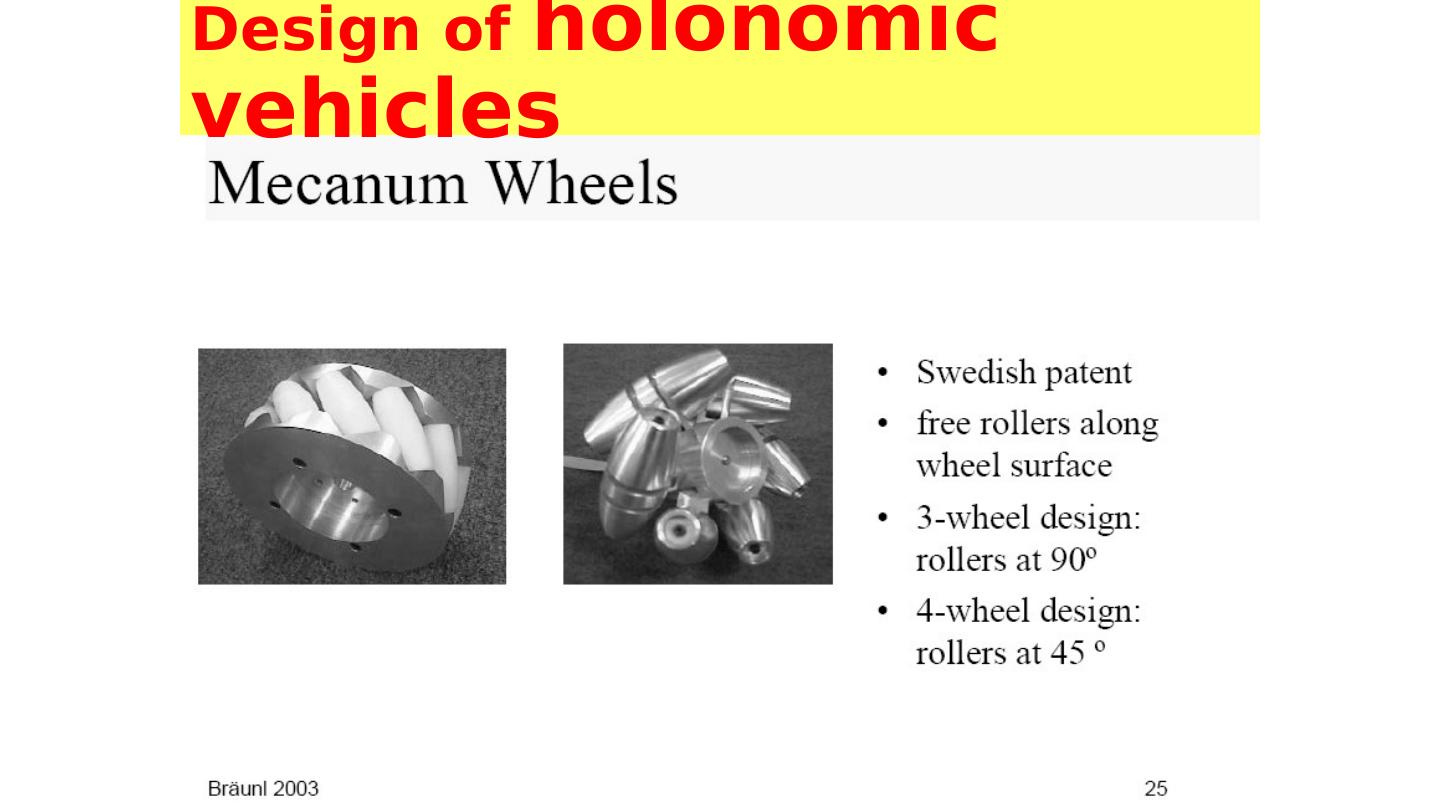
10 .Design of holonomic vehicles
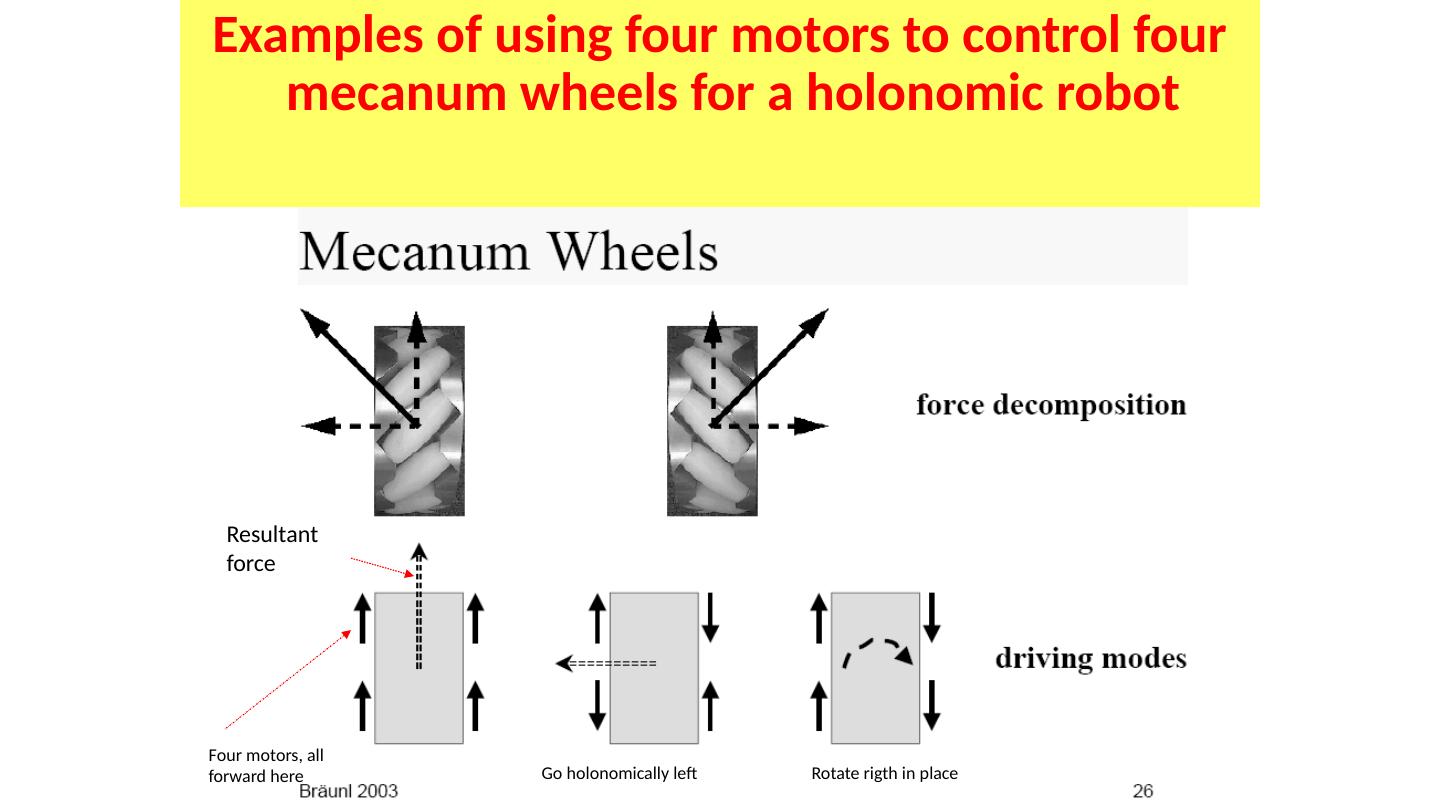
11 .Examples of using four motors to control four mecanum wheels for a holonomic robot Resultant force Four motors, all forward here Go holonomically left Rotate rigth in place
13 .Go holonomically right
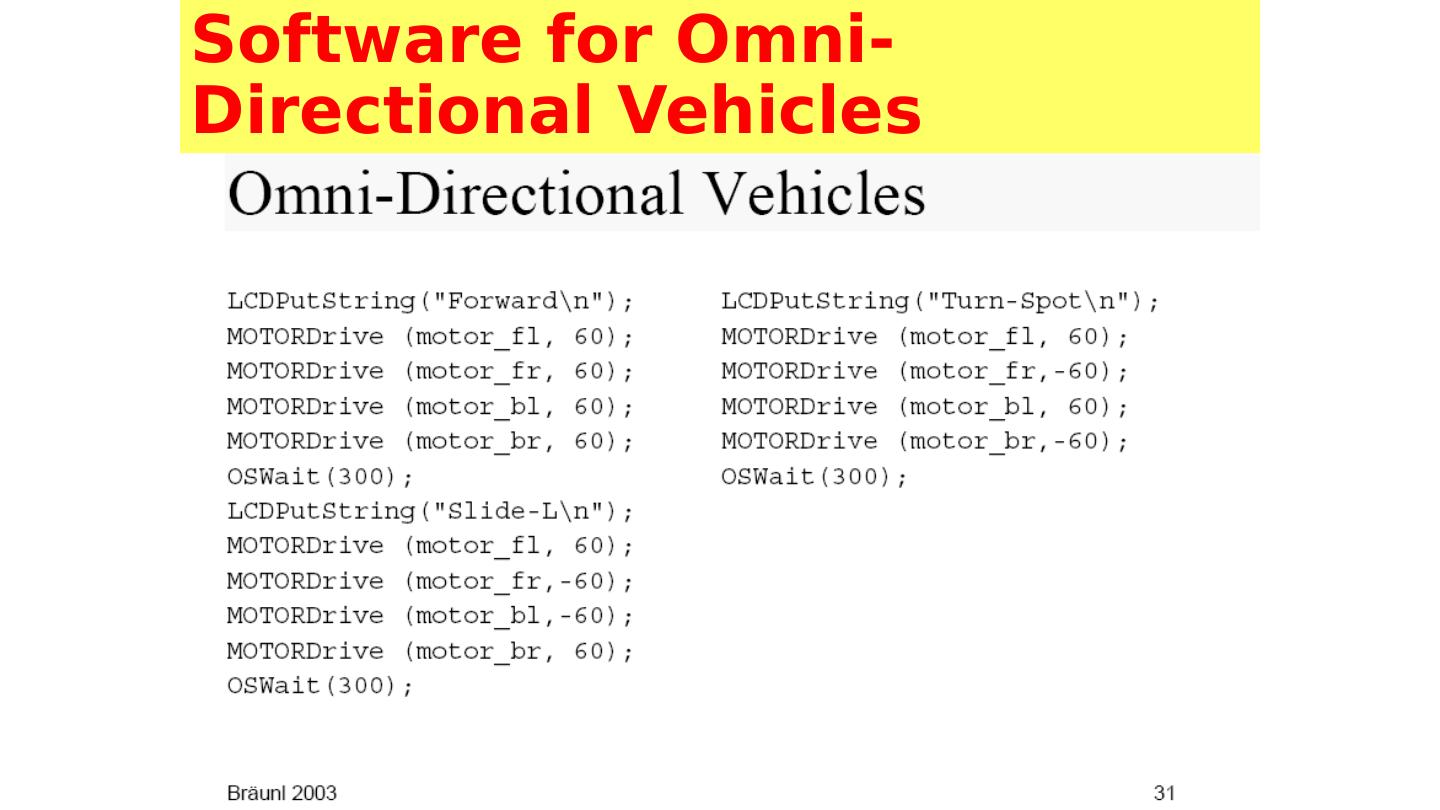
16 .Software for Omni-Directional Vehicles
17 .Matrix motion description for Mecanum Wheels Velocities and angle Rotation angles derivatives of wheels
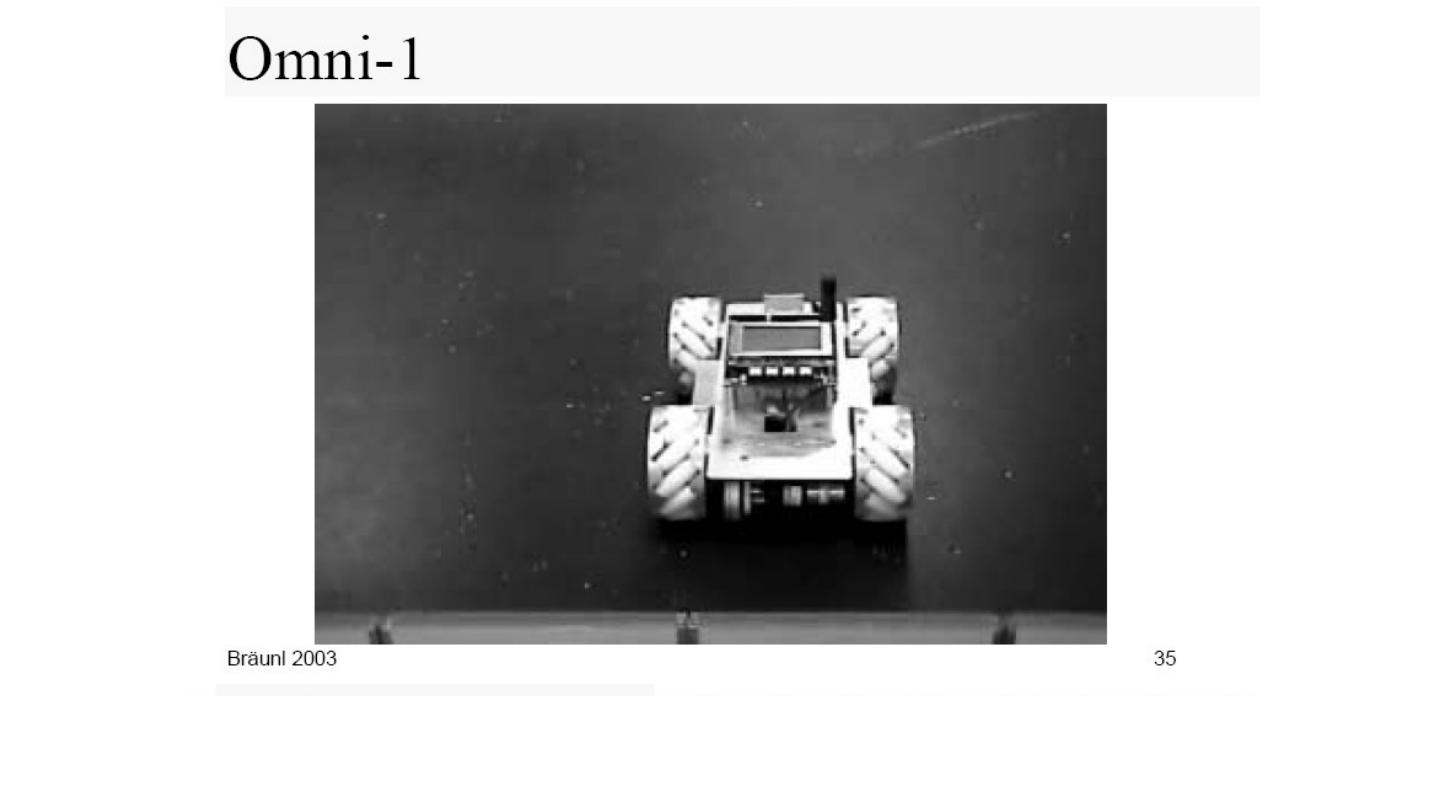
18 .Example of a robot with Omni Wheels: OMNI-1
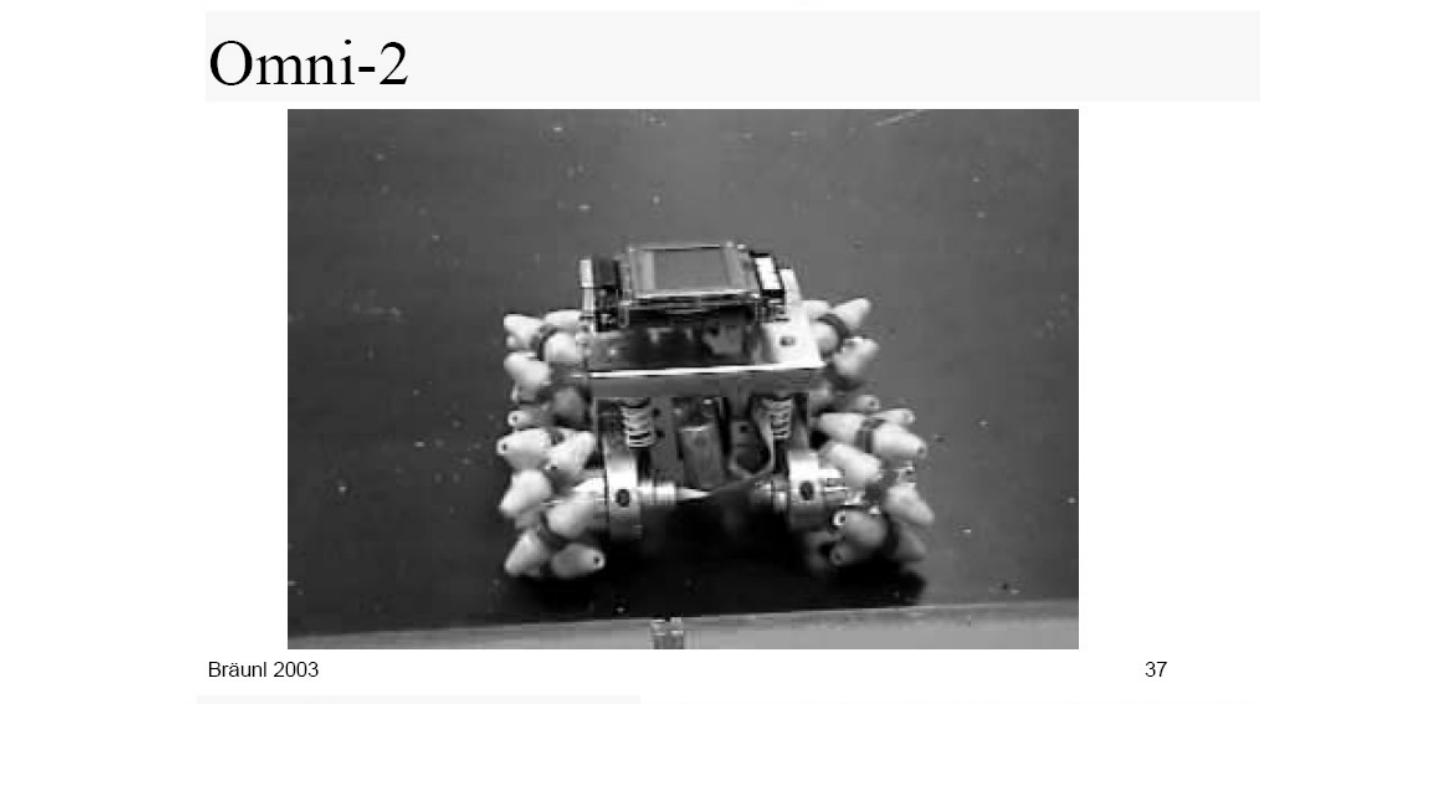
19 .Example of a robot with Omni Wheels: OMNI-2
20 .Example of a robot with Omni Wheels: OMNI-2
21 .Example of a robot with Omni Wheels: OMNI-2
22 .Example of a robot with Omni Wheels: OMNI-2
23 .Design of new types of robots that combine mobile and walking
24 .Design of new types of robots that combine mobile and walking
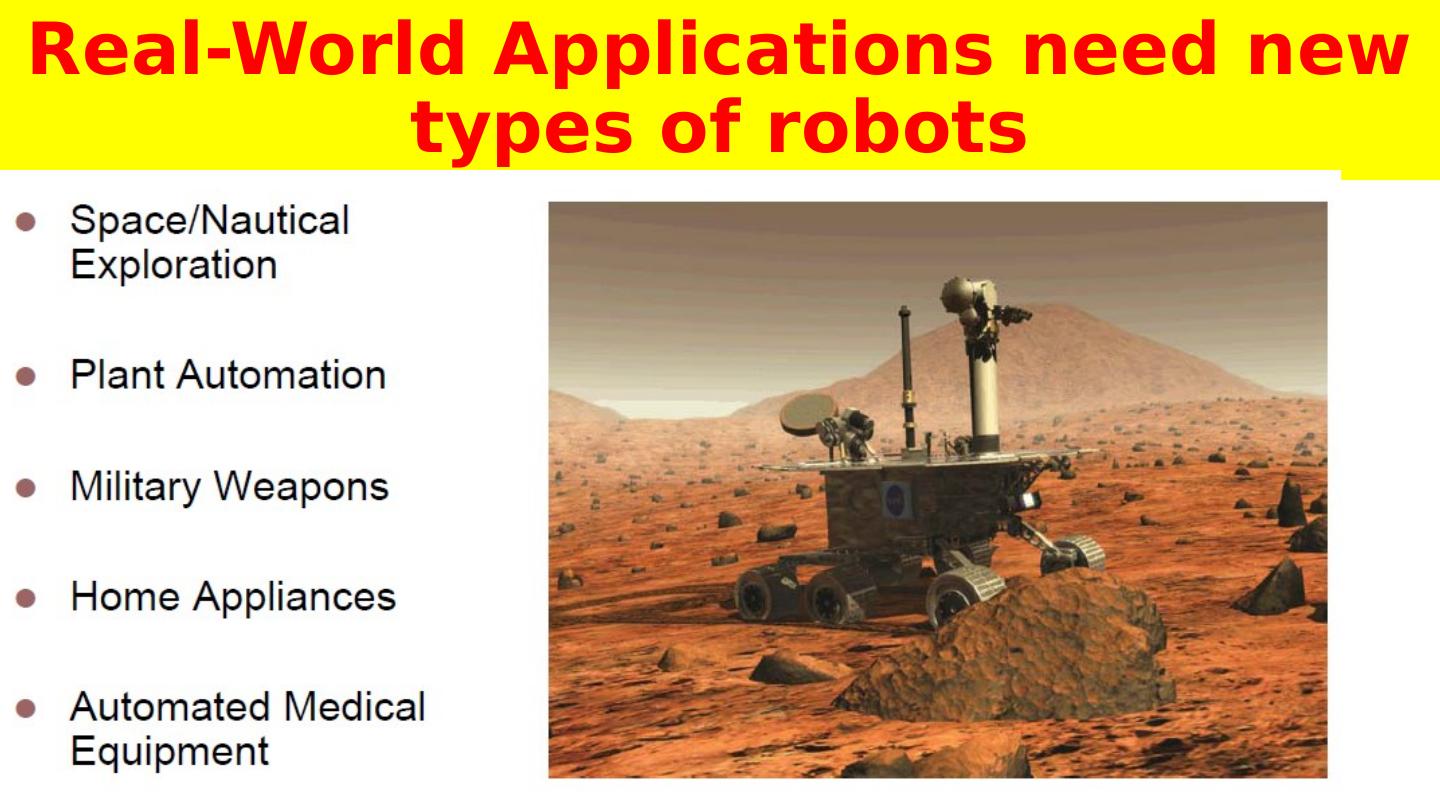
25 .Real-World Applications need new types of robots
28 .Robots that walk, how?
29 .Robots that walk, how?