展开查看详情
1 .Disadvantages of Spherical/Polar
�
2 . Revolute
Coordinate
System
�
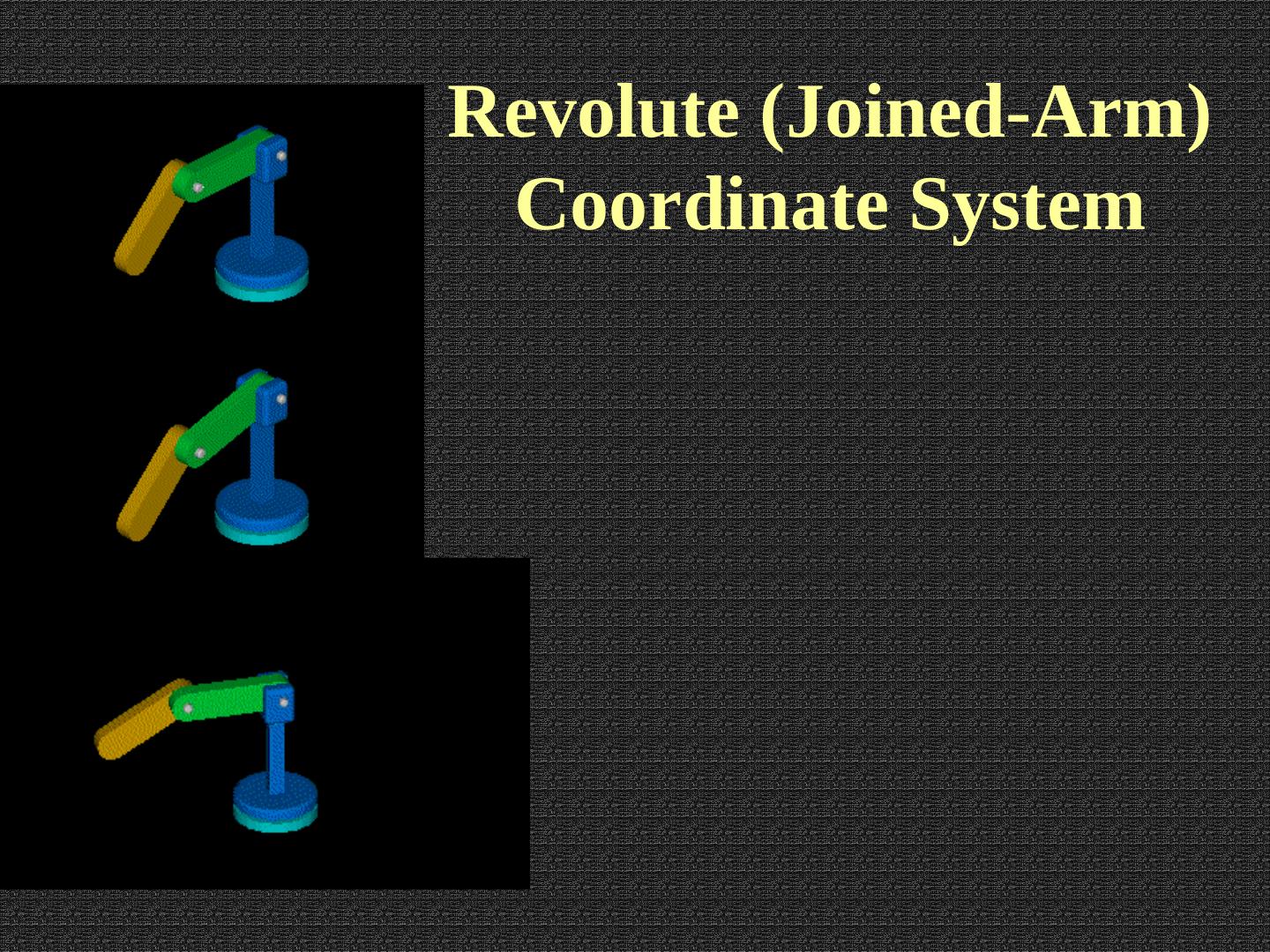
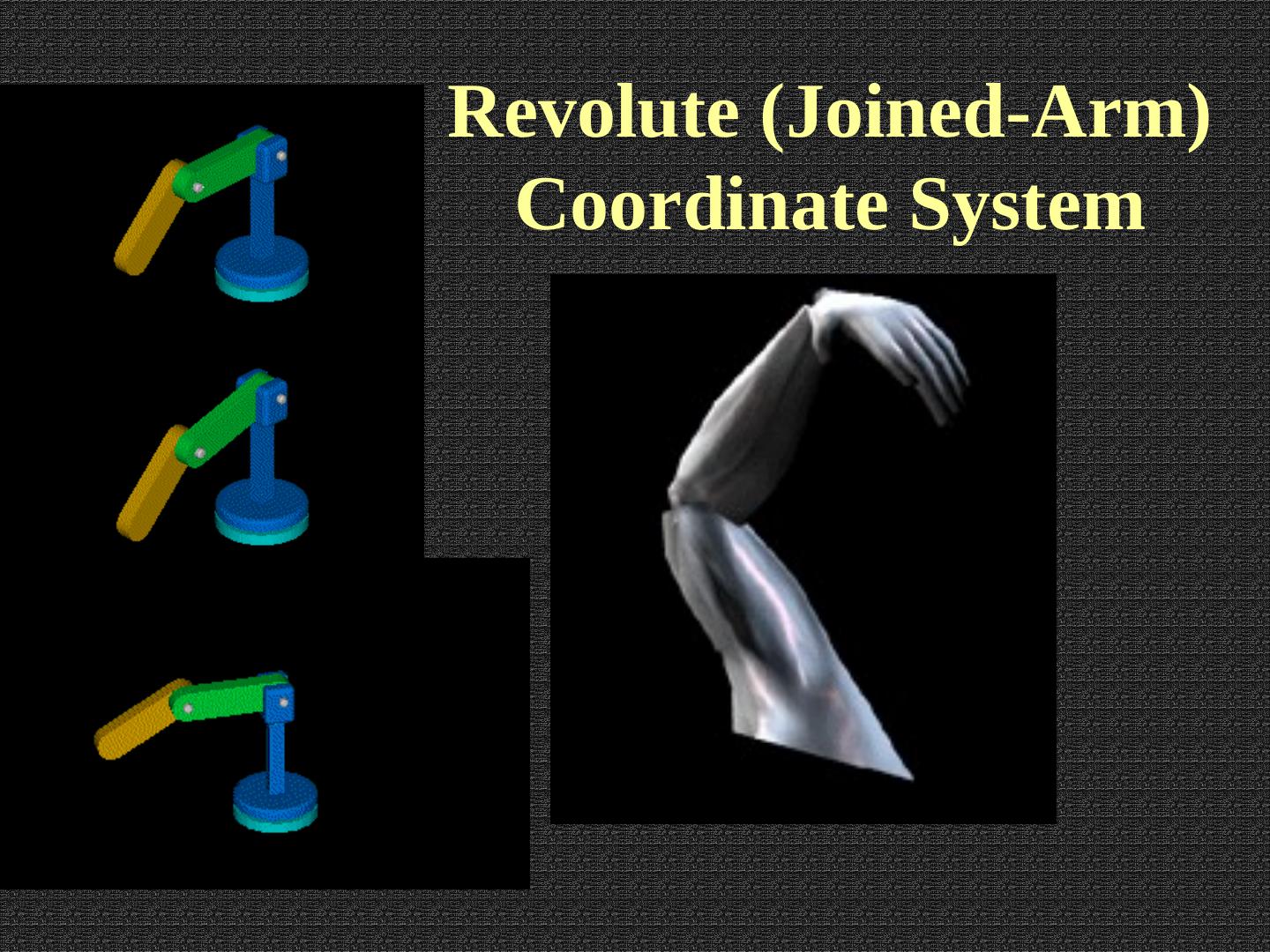
3 .Revolute (Joined-Arm)
Coordinate System
�
4 .Revolute (Joined-Arm)
Coordinate System
alpha - Axis
�
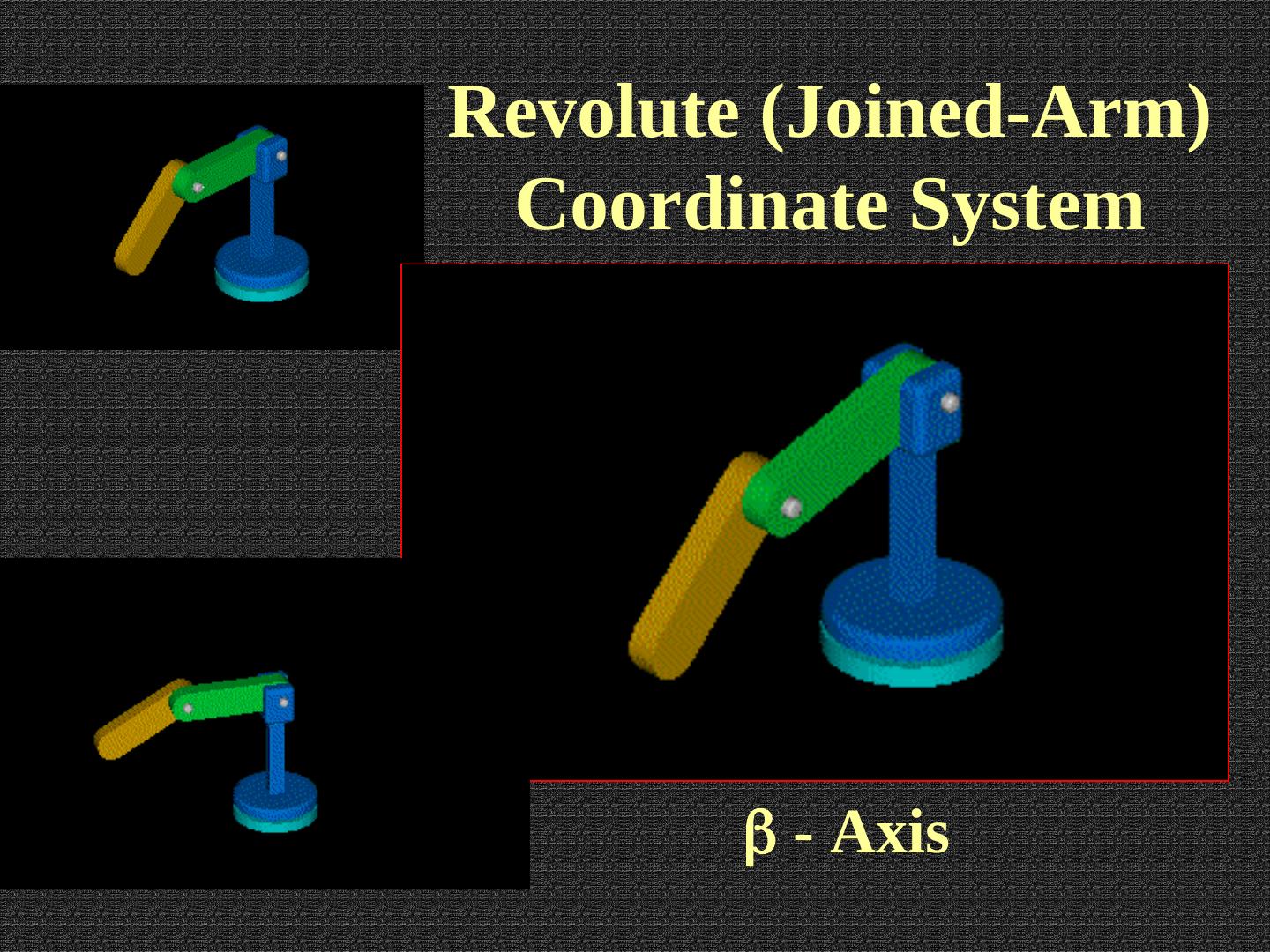
5 .Revolute (Joined-Arm)
Coordinate System
- Axis
�
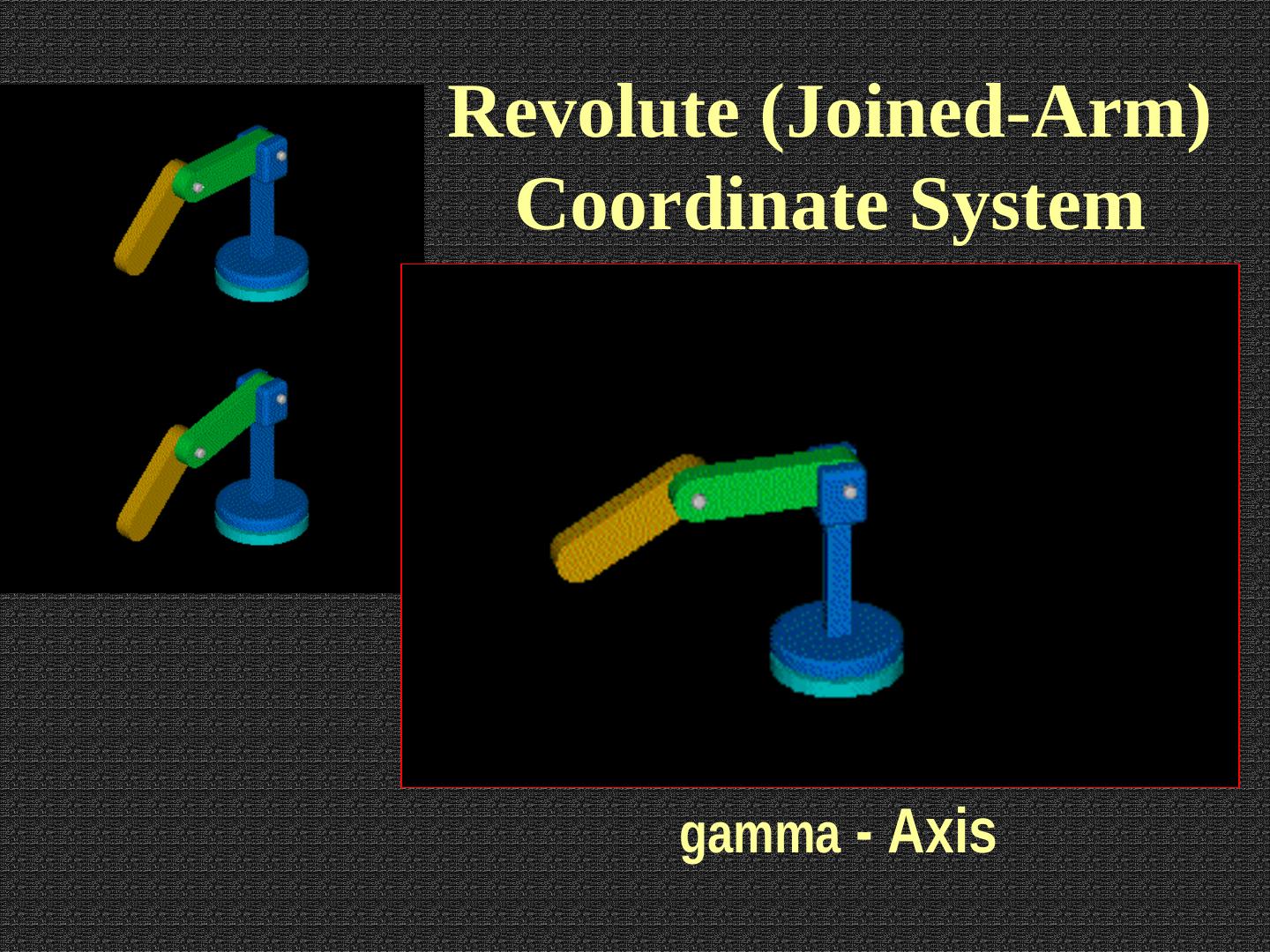
6 .Revolute (Joined-Arm)
Coordinate System
gamma - Axis
�
7 .Revolute (Joined-Arm)
Coordinate System
�
9 .Advantages of Articulate/Jointed
Arm/Revolute
�
10 . Disadvantages of
Articulate/Jointed Arm/Revolute
�
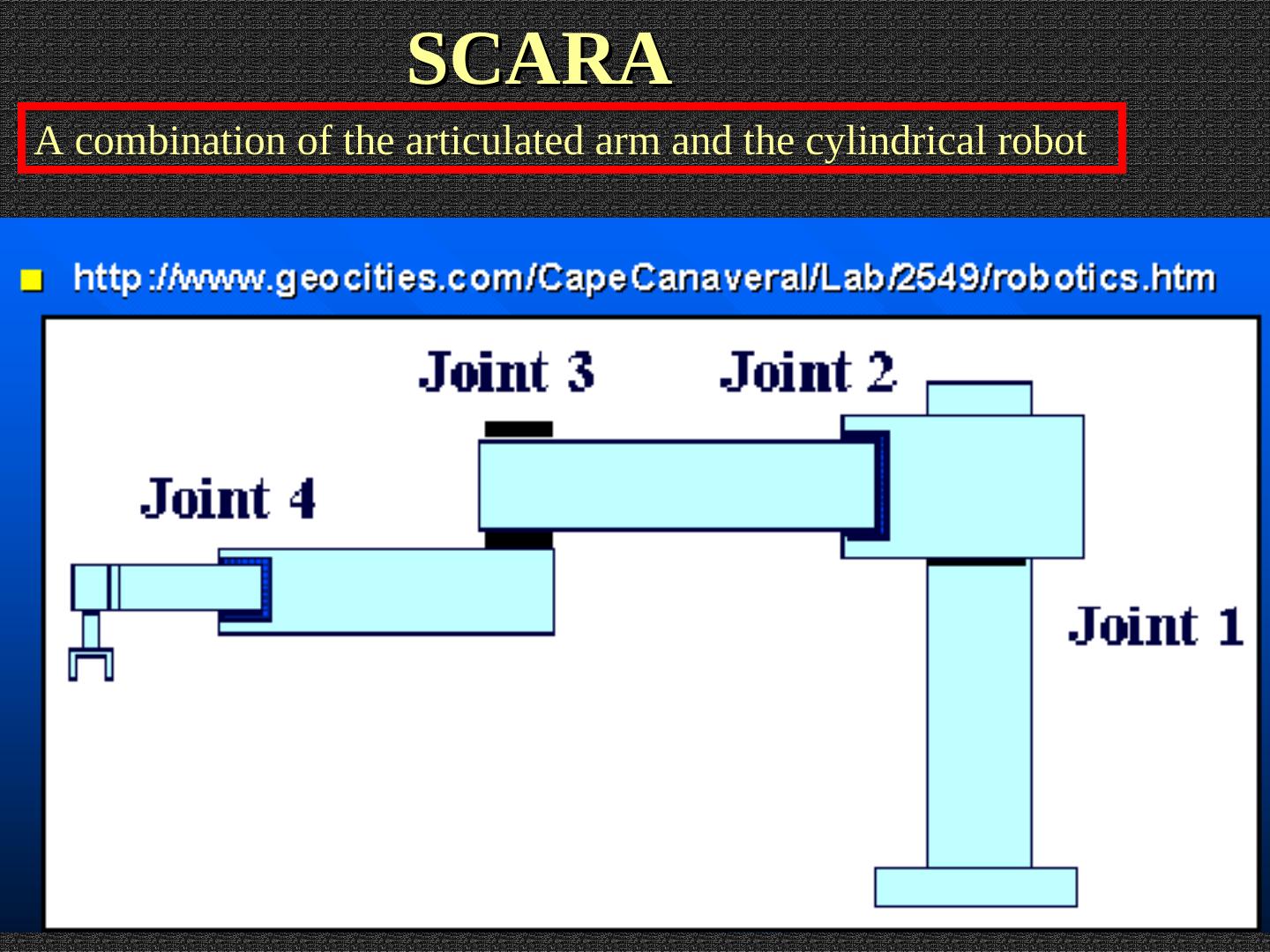
11 . SCARA
A combination of the articulated arm and the cylindrical robot
�
12 .Illustration of
DOF of
Revolute
Coordinate
System
�
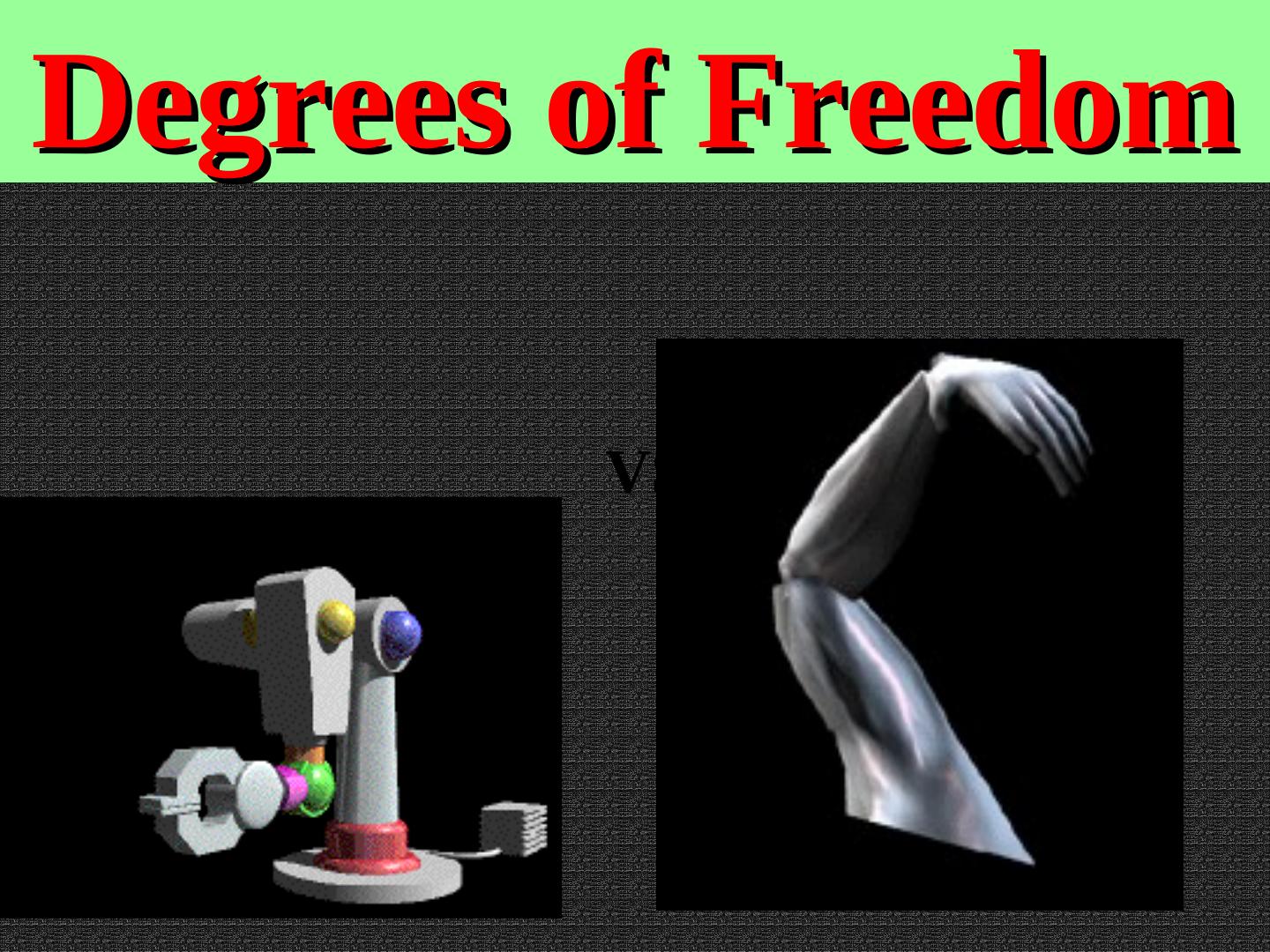
13 .Degrees of Freedom
VS
�
14 .Degrees of Freedom
•Rotating the base.
�
15 .Degrees of Freedom
• Pivot the base of
the arm.
�
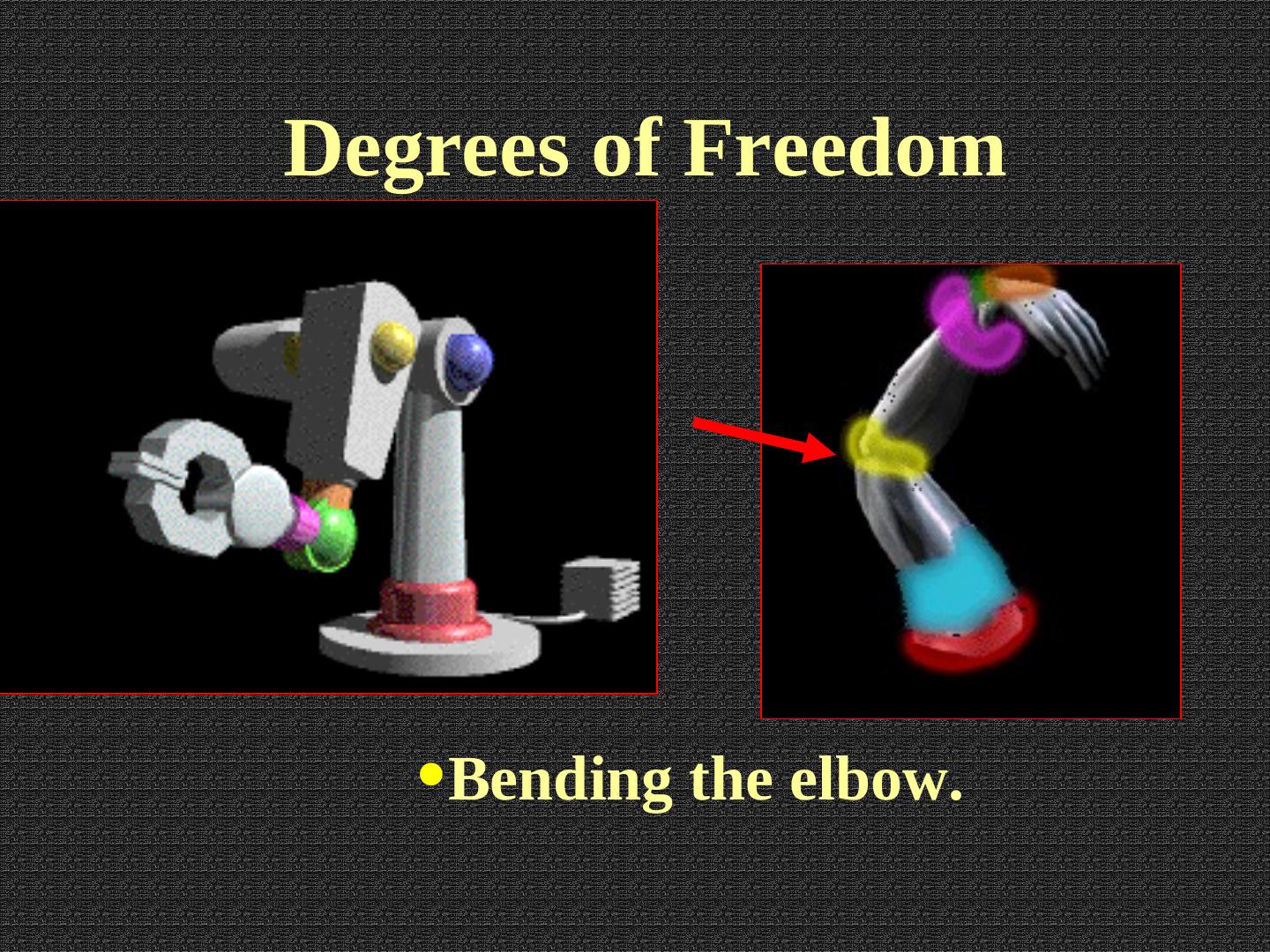
16 .Degrees of Freedom
•Bending the elbow.
�
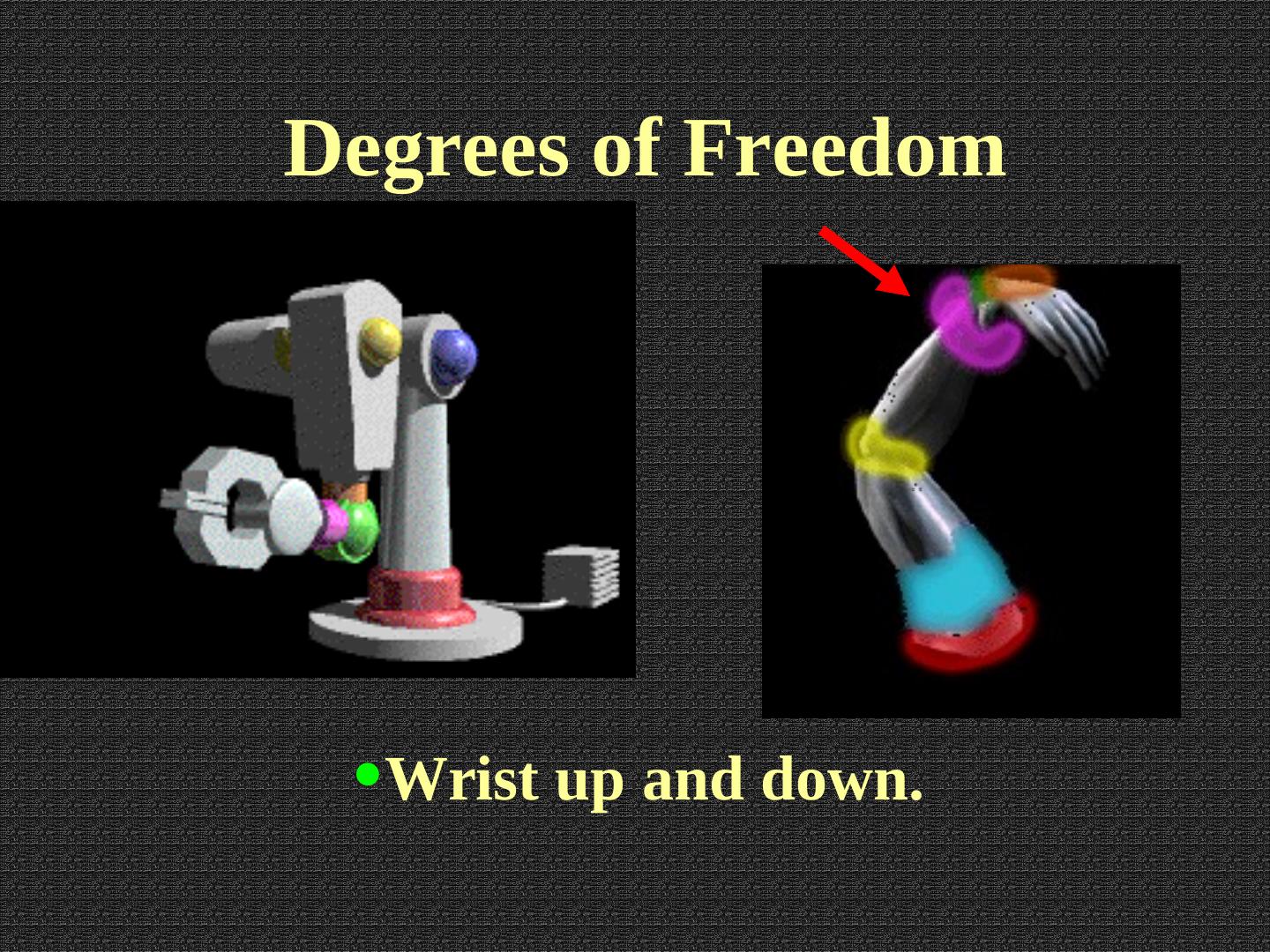
17 .Degrees of Freedom
•Wrist up and down.
�
18 .Degrees of Freedom
•Wrist left and right.
�
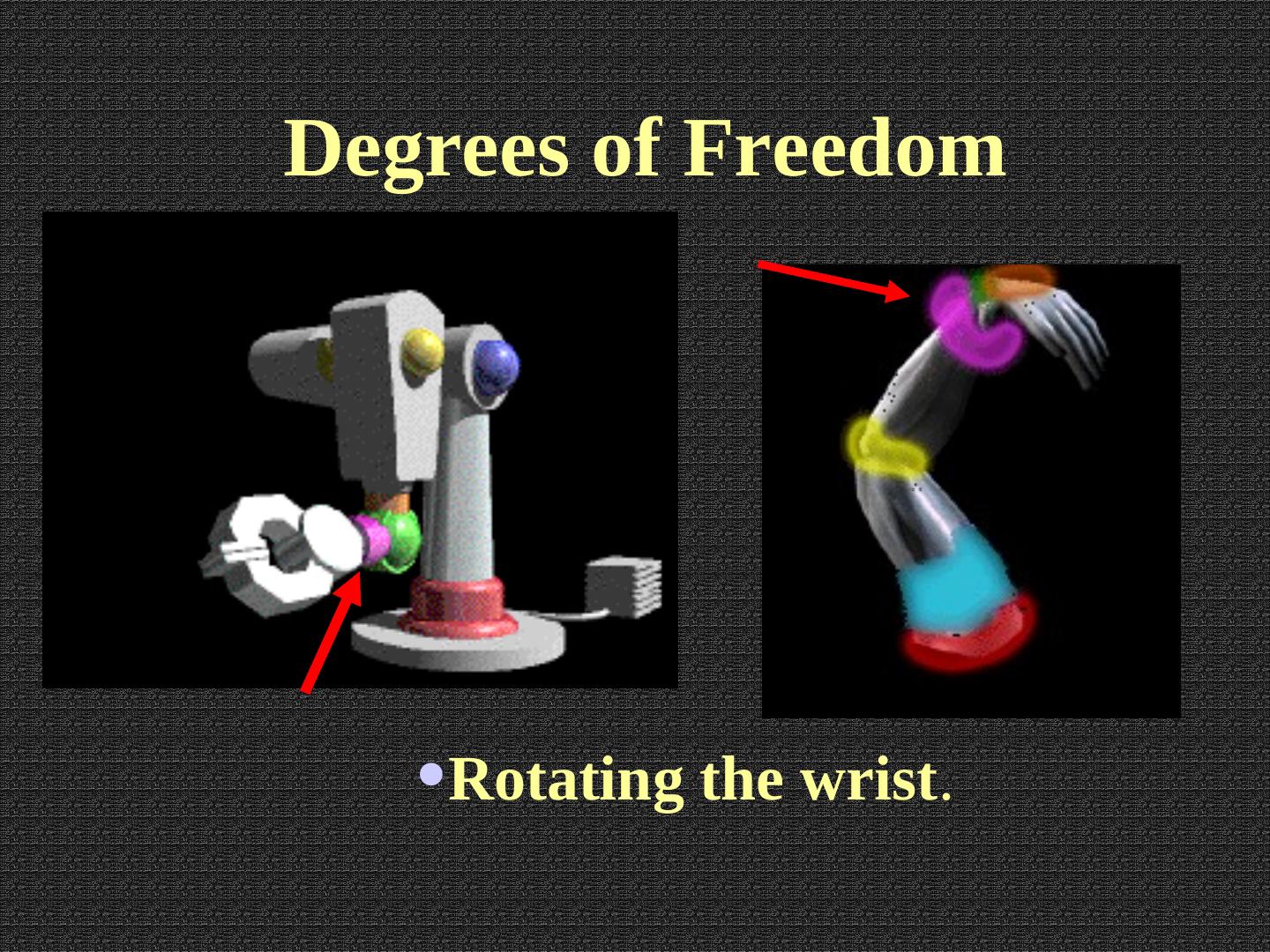
19 .Degrees of Freedom
•Rotating the wrist.
�
20 .Classification Based on Number of
joints or degrees of freedom
�
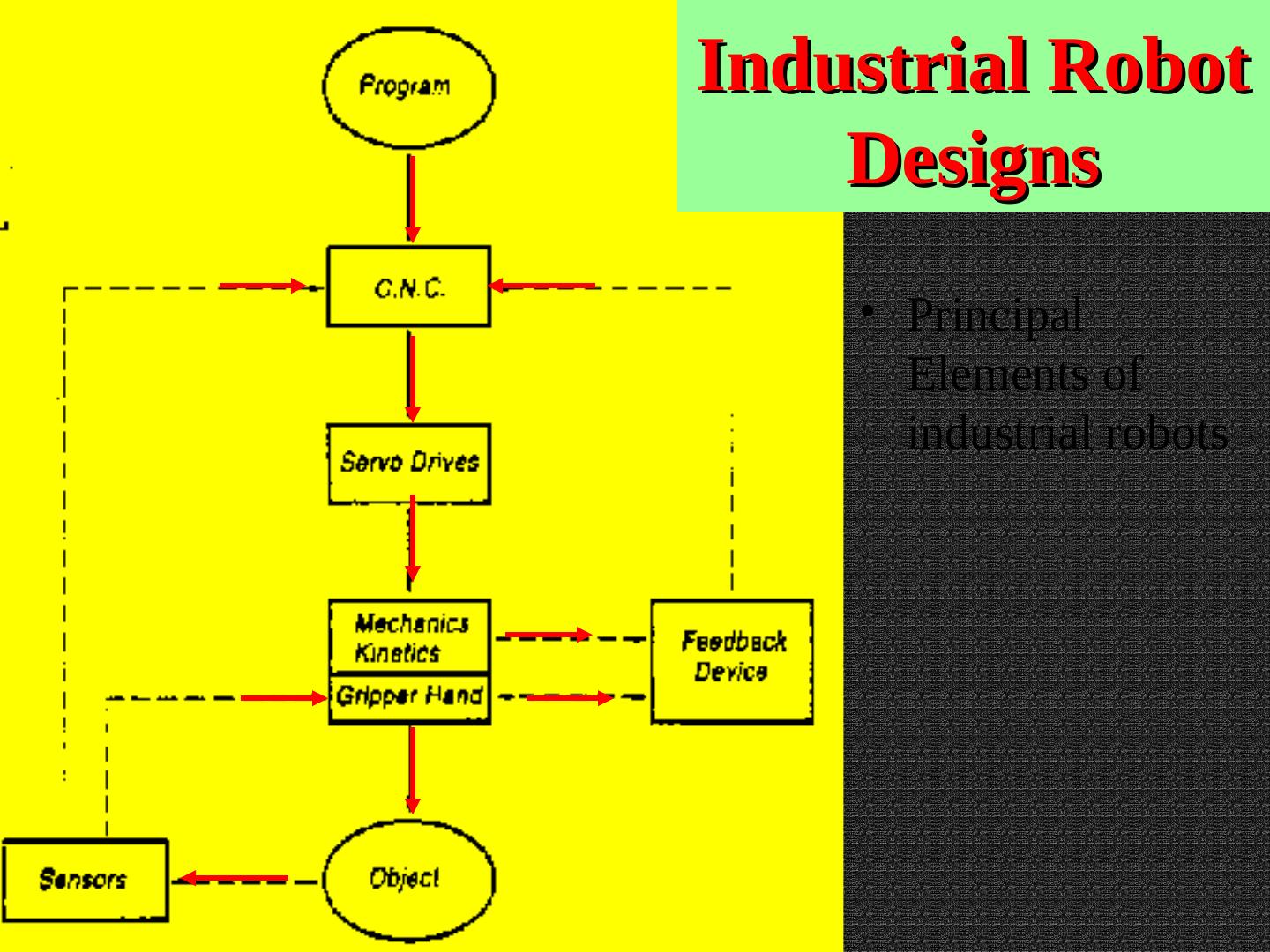
21 .Industrial Robot
Designs
• Principal
Elements of
industrial robots
�
22 . Working Area of Industrial Robots
• Mechanics/Kin
ematics
• Kinematics
concepts of a
3-axis
industrial
robot and the
resulting
work area.
�
23 .Classification of Industrial
Robots
�
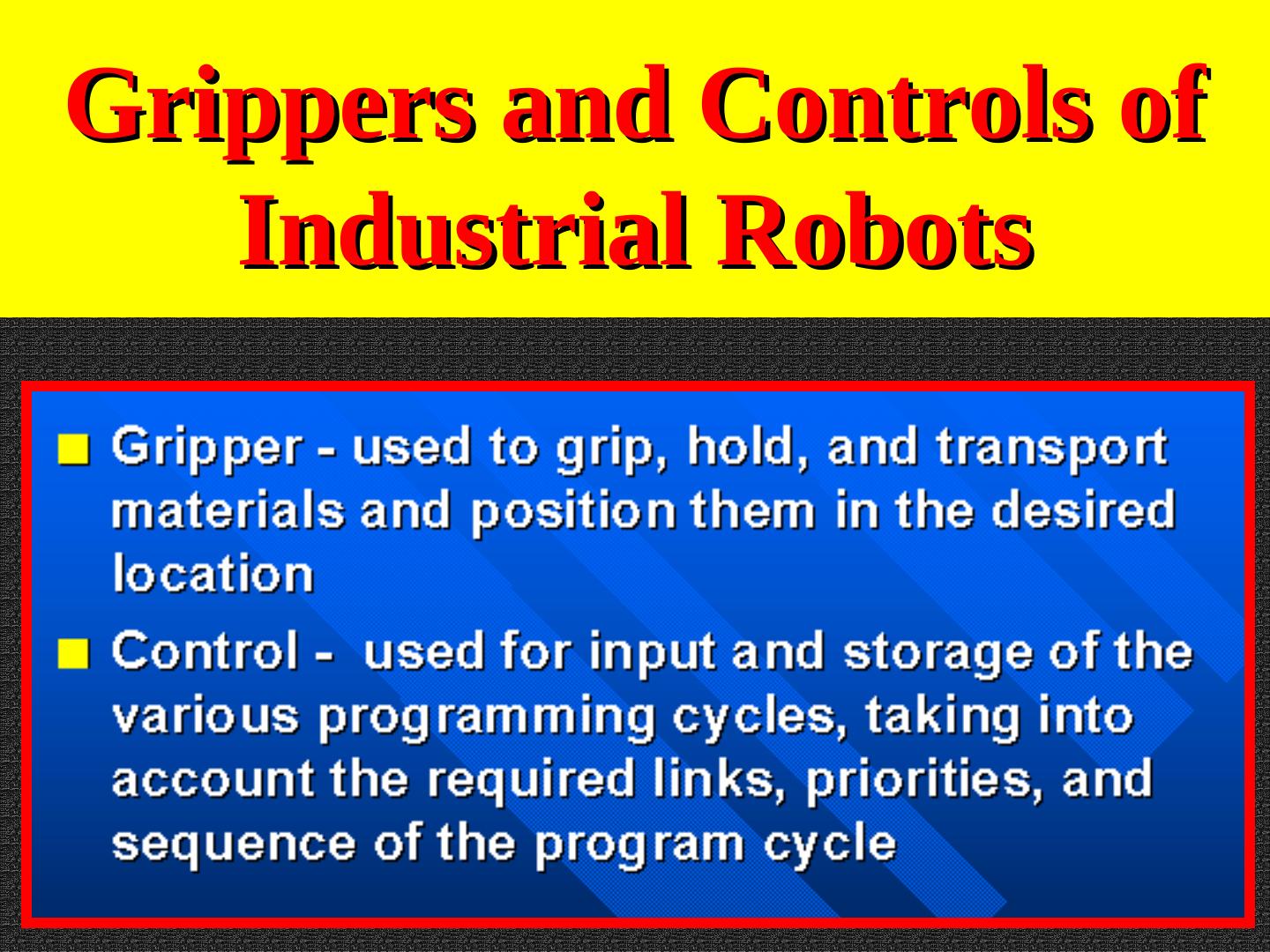
24 .Grippers and Controls of
Industrial Robots
�
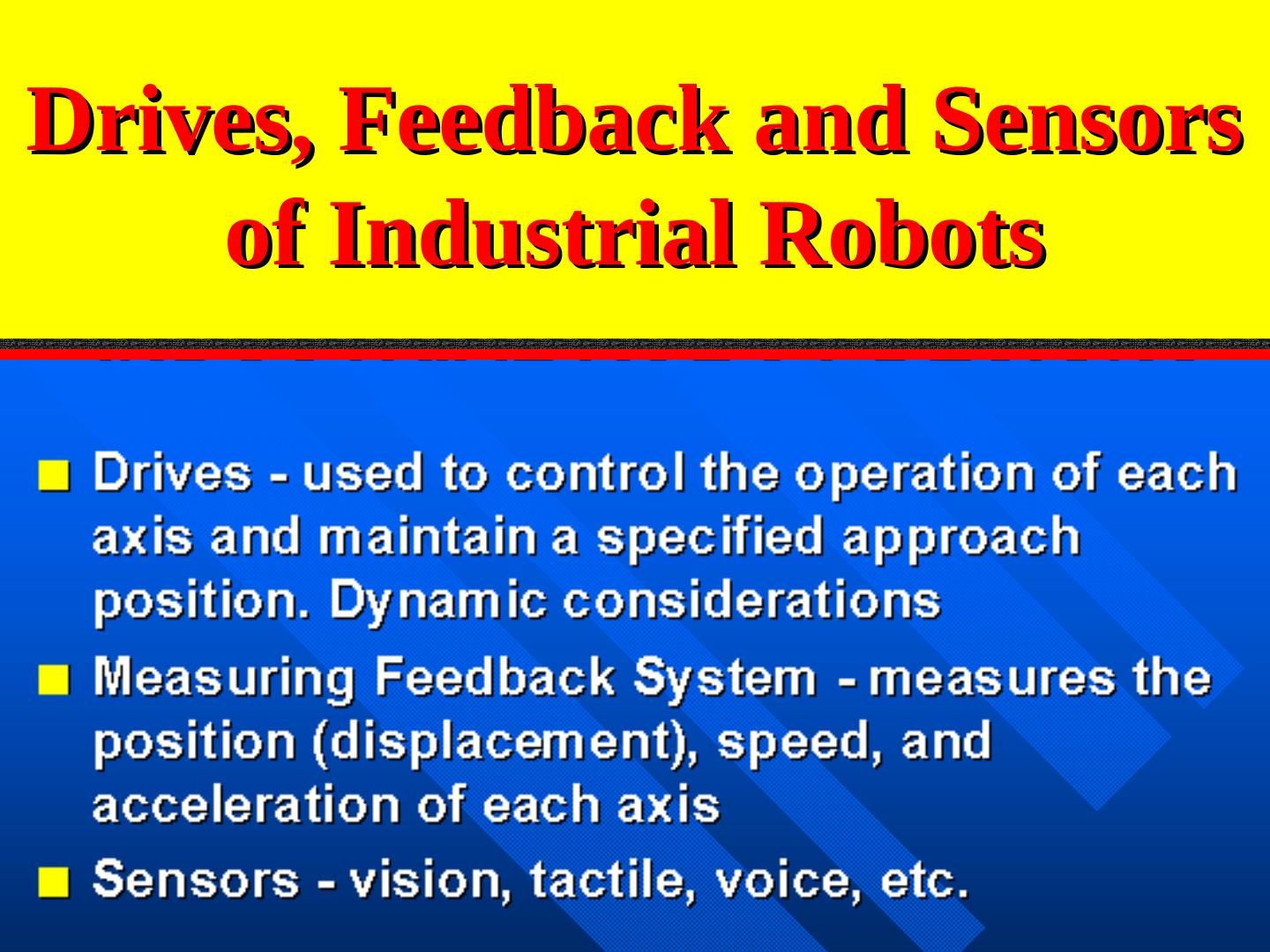
25 .Drives, Feedback and Sensors
of Industrial Robots
�
26 .Basic Robot Motions and
DOF of industrial robots
�
27 . Arm and Body Motions
•Vertical Traverse:
•up-and-down motions of the arm,
•caused by pivoting the entire arm about a horizontal axis
or moving the arm along a vertical slide
•Radial Traverse:
•extension and retraction of the arm (in-and-out movement)
•Rotational Traverse:
•rotation about the vertical axis (right or left swivel of the
robot arm)
�
29 . Basic Motions
Rotational
vertical
traverse
traverse
Wrist bend
radial traverse
Wrist
Swivel
Wrist
yaw
�