INDUSTRIAL ARMS_Cartesian Coordinate System
分享
点赞
3
收藏
1
下载 0
-
快召唤伙伴们来围观吧
-
微博
QQ
QQ空间
贴吧
-
文档嵌入链接
- 复制
-
-
微信扫一扫分享
-
已成功复制到剪贴板
Mechanical Robot Design:Industrial Robot Arms
1.Typical robots
2.Basic mechanical ideas
3.Calculation of mechanical robot components
展开查看详情
1 .MECHANICAL
ROBOT
DESIGN
�
3 .1. Typical robots
2. Basic mechanical ideas
3. Calculation of mechanical robot components
This part of lecture is useful only to students who
are designing new robots, their components (like
arms, legs, necks, hands and heads) or modifying
the existing lab robots.
�
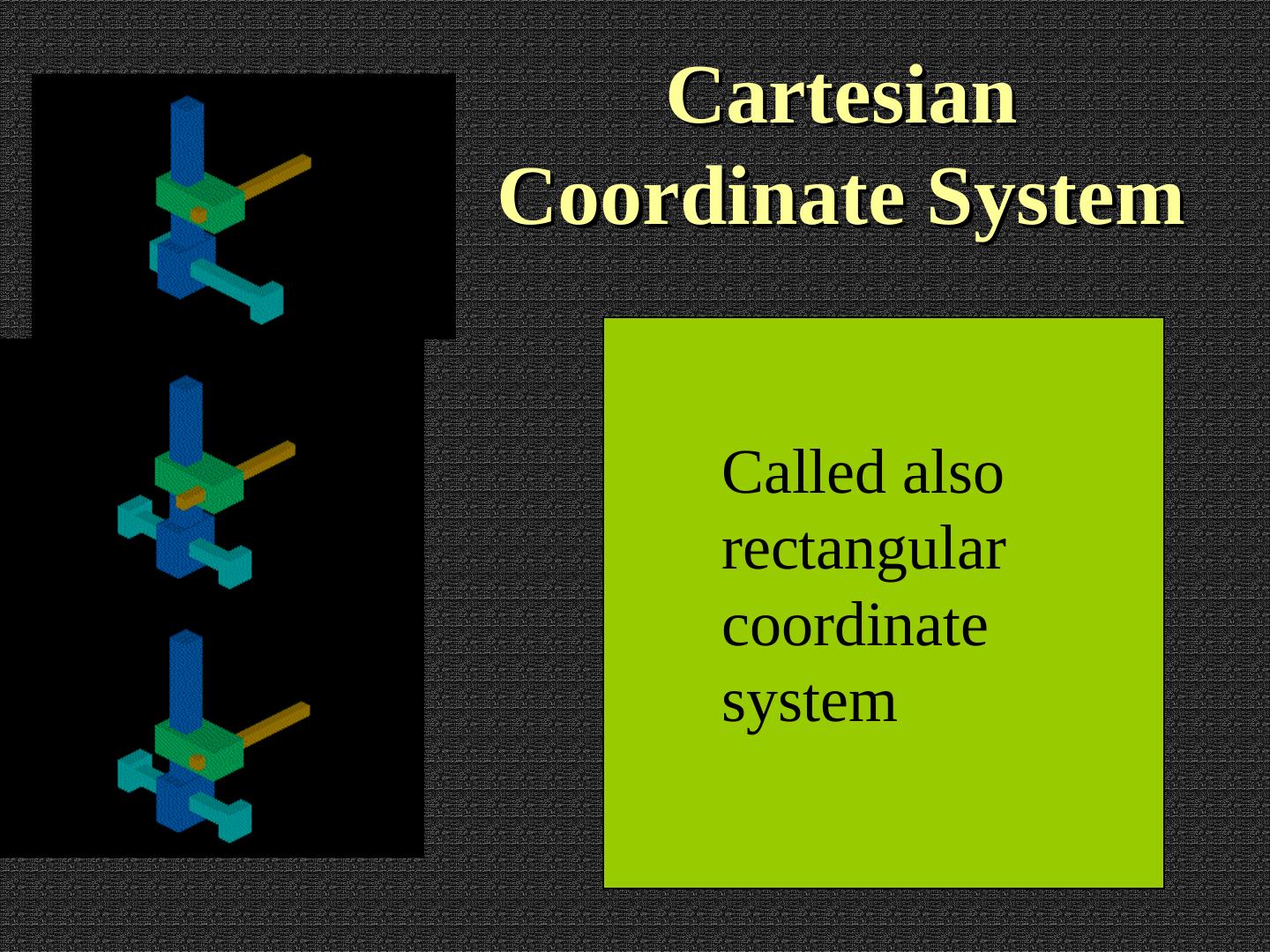
4 . Cartesian
Coordinate System
Called also
rectangular
coordinate
system
�
5 . Cartesian
Coordinate System
X- Axis
�
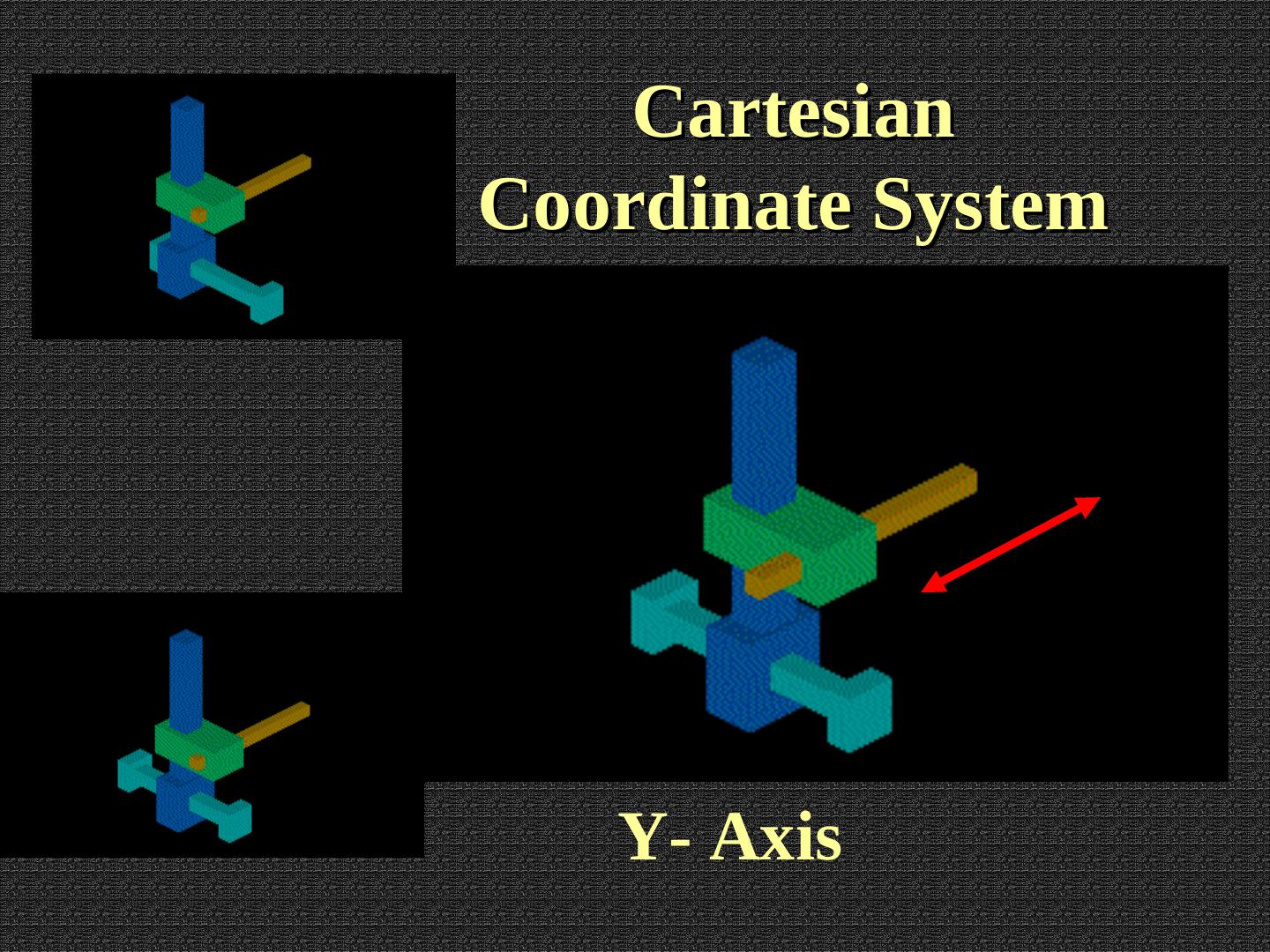
6 . Cartesian
Coordinate System
Y- Axis
�
7 . Cartesian
Coordinate System
Z- Axis
�
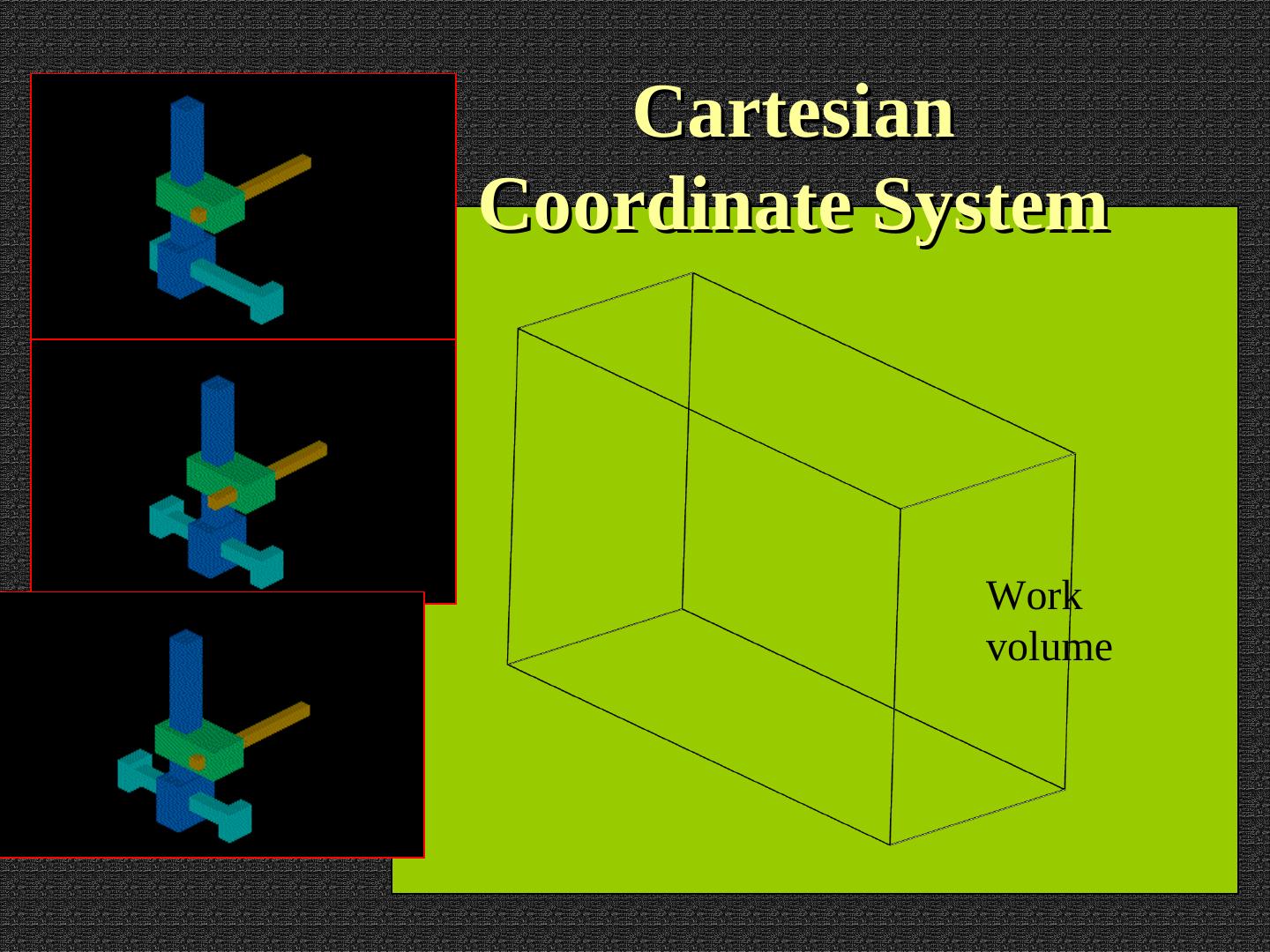
8 . Cartesian
Coordinate System
Work
volume
�
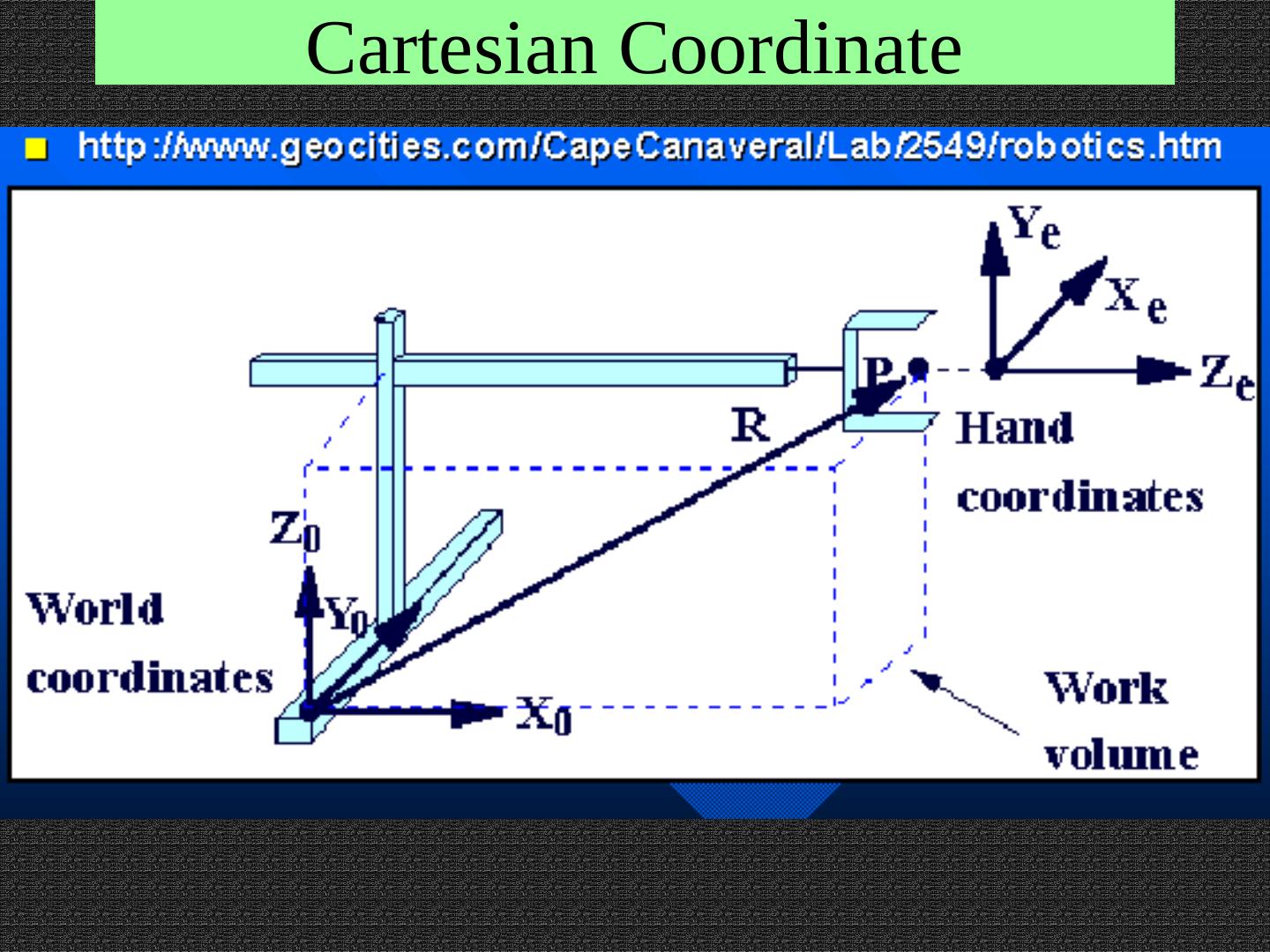
9 . Cartesian Coordinate
Let us distinguish between
the world coordinates and
the hand coordinates
�
11 . Advantages of Cartesian System
1. High resolution and great accuracy and repeatibility
2. Good obstacle avoidance and collision prevention
3. Ease of joint motion with respect to gravity loading
4. Easier control
5. Lift capacity can be high
�
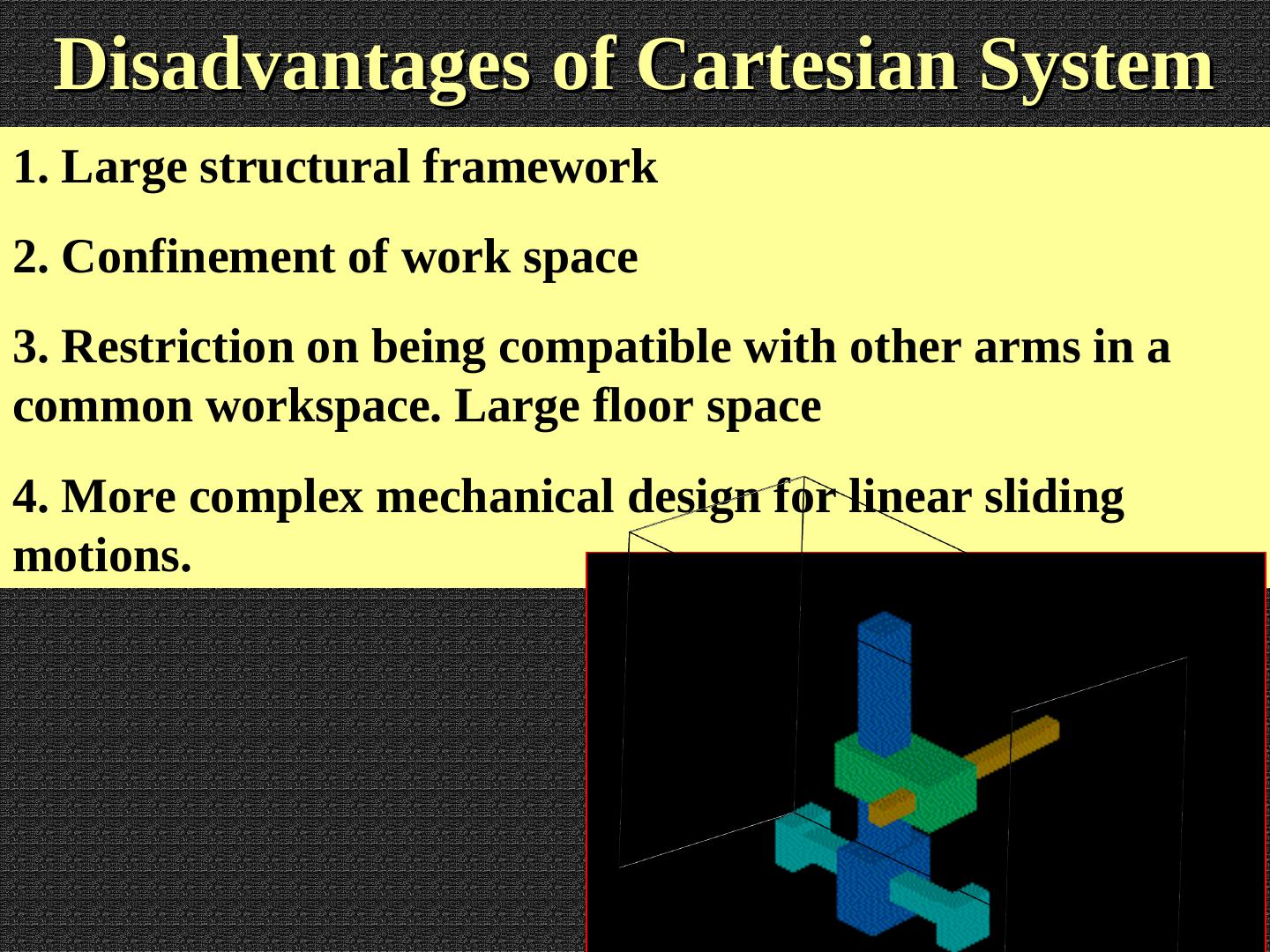
12 . Disadvantages of Cartesian System
1. Large structural framework
2. Confinement of work space
3. Restriction on being compatible with other arms in a
common workspace. Large floor space
4. More complex mechanical design for linear sliding
motions.
�
13 . Questions and Problems
1. Find a robot arm description in one of robot shops on
internet. Describe it in the same way as the robot
above.
2. For the above robot, plan how would you design it
using components available in the lab. Create technical
sketches and drawings.
3. Invent a robot arm with different arrangement of DOF
than the Cartesian Coordinate system.
4. Assuming that you remember about basic high school
mechanics like lever, gears and pulleys, perform
power/torque/linkage calculations for the above robot.
If you forgot, read the material from the forthcoming
lectures.
�