Cylindrical and Polar Systems
分享
点赞
6
收藏
1
下载 0
-
快召唤伙伴们来围观吧
-
微博
QQ
QQ空间
贴吧
-
文档嵌入链接
- 复制
-
-
微信扫一扫分享
-
已成功复制到剪贴板
1. Reduced effect of gravity loading
2. Free movement with moderate collisions
3. Two linear axes make the mechanical design less complex than Cartesian
4. Good accuracy
展开查看详情
1 . Cylindrical
Coordinate System
�
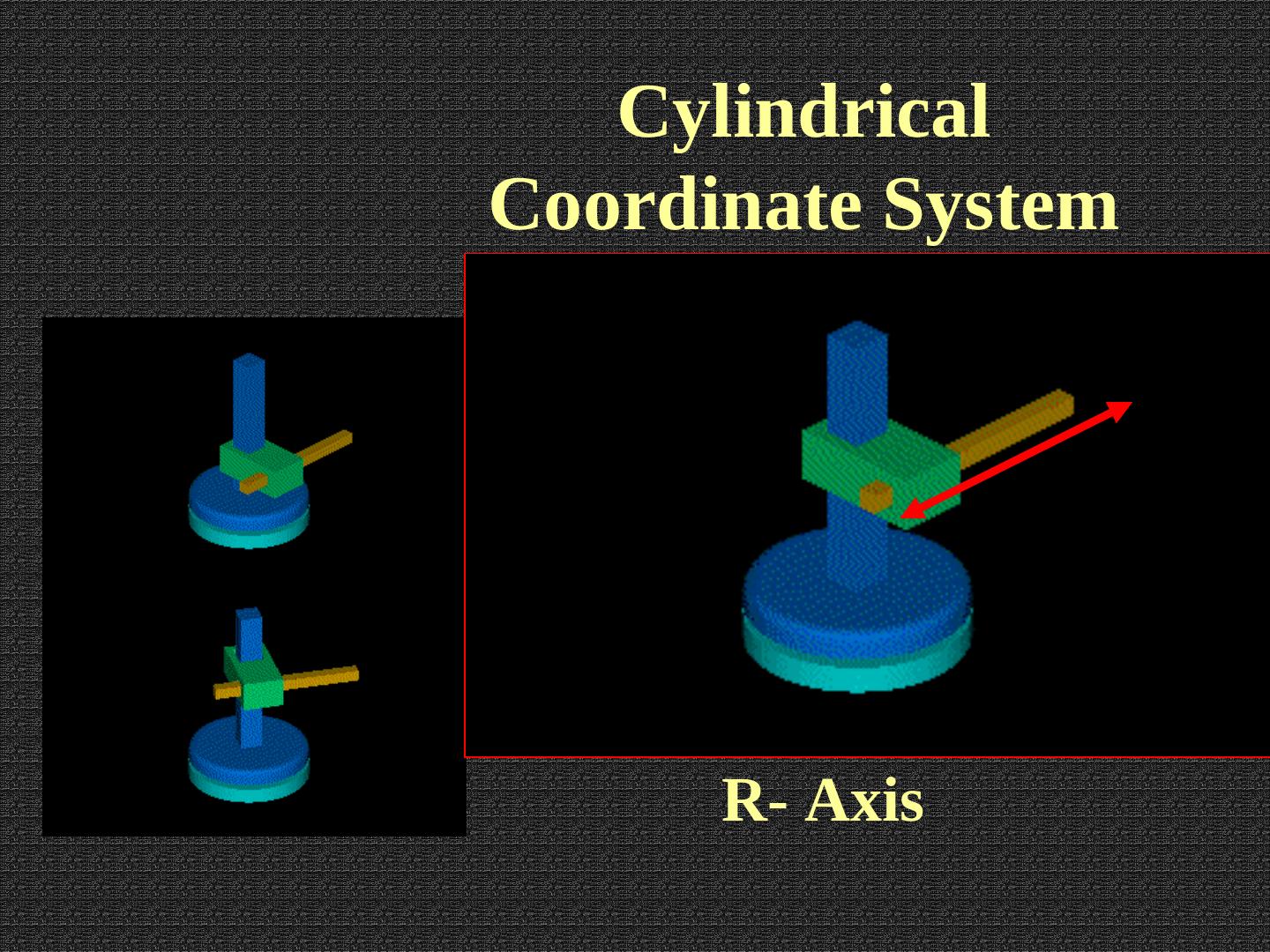
2 . Cylindrical
Coordinate System
R- Axis
�
3 . Cylindrical
Coordinate System
Z - Axis
�
4 . Cylindrical
Coordinate System
theta - Axis
�
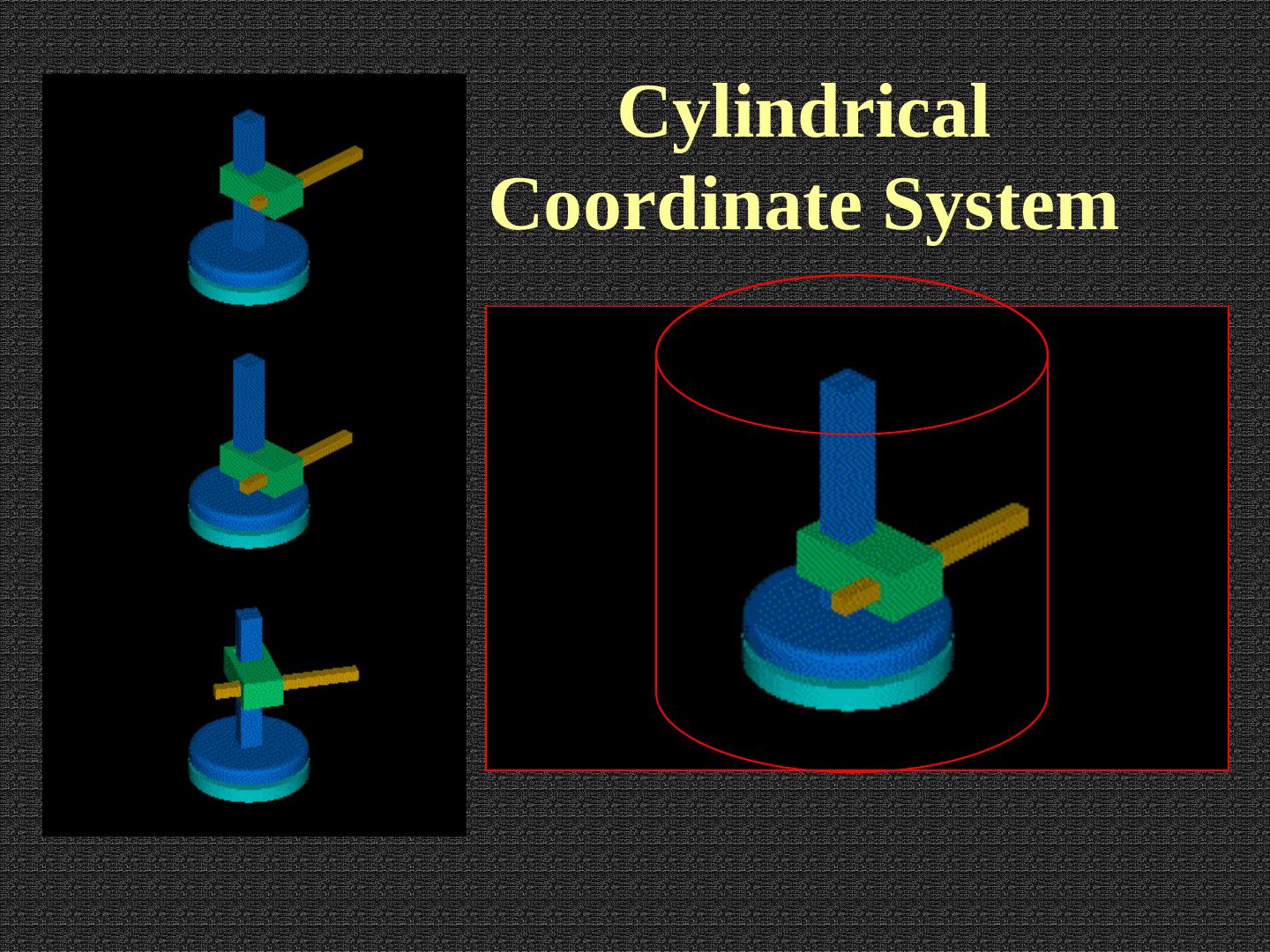
5 . Cylindrical
Coordinate System
�
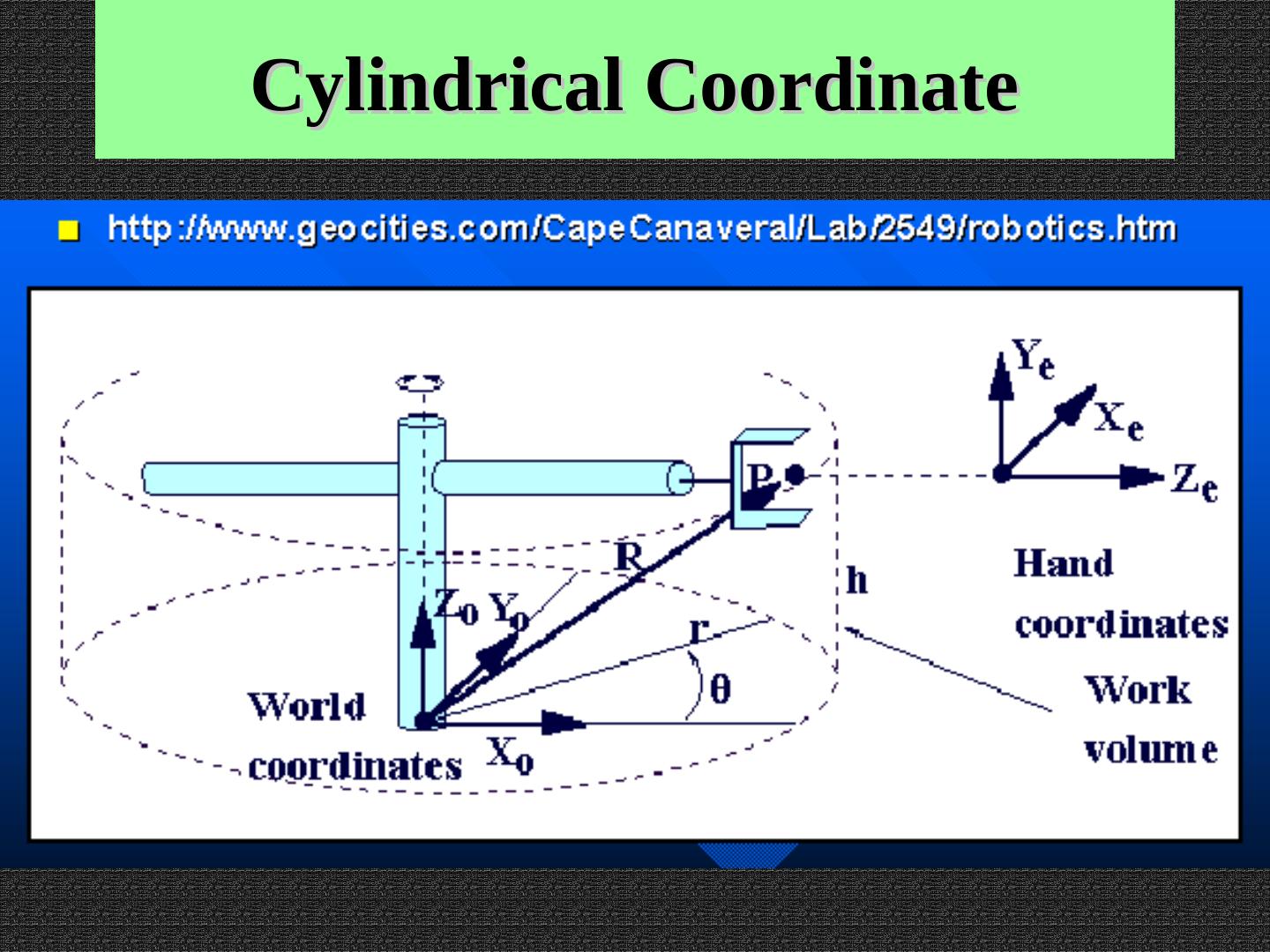
6 .Cylindrical Coordinate
�
7 . Advantages of Cylindrical
1. Reduced effect of gravity loading
2. Free movement with moderate collisions
3. Two linear axes make the mechanical design less
complex than Cartesian
4. Good accuracy
�
8 . Disadvantages of Cylindrical
1. Some restrictions on compatibility
with other manipulators in a common
work space
2. Less accuracy and resolution
compared with Cartesian
�
9 . Polar (Spherical)
Coordinate System
�
10 . Polar (Spherical)
Coordinate System
- Axis
�
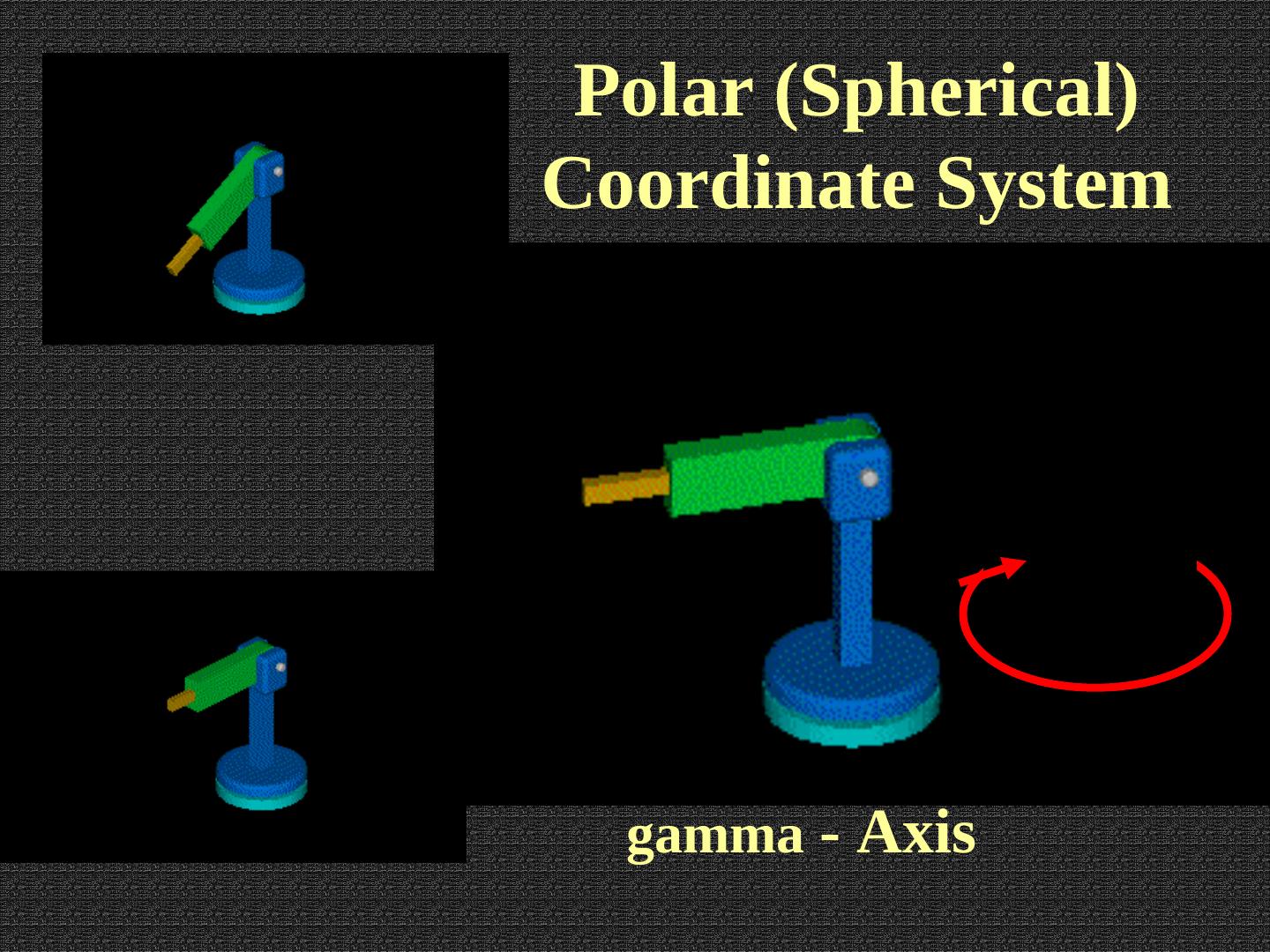
11 . Polar (Spherical)
Coordinate System
gamma - Axis
�
12 . Polar (Spherical)
Coordinate System
R - Axis
�
13 . Polar (Spherical)
Coordinate System
�
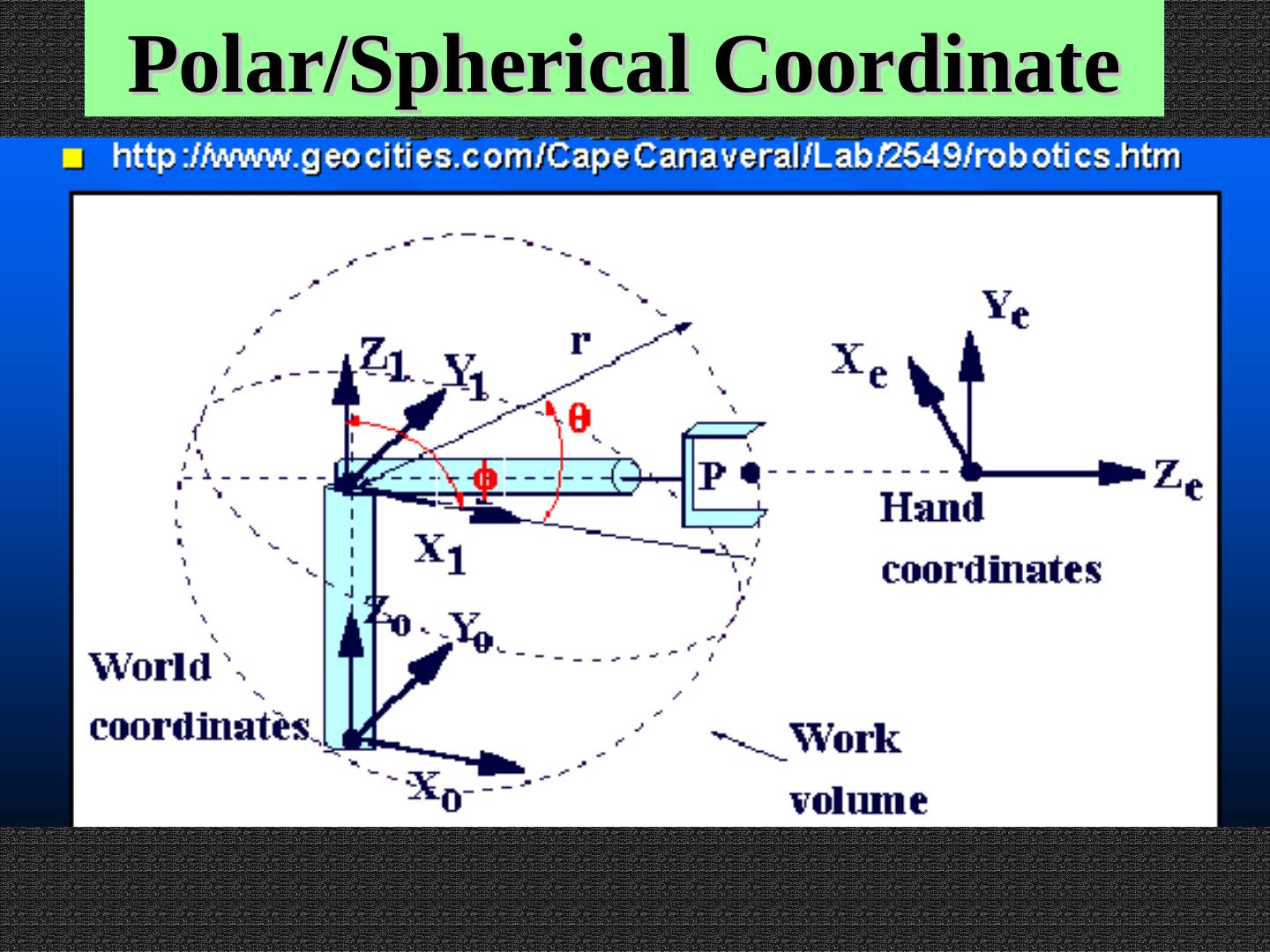
14 .Polar/Spherical Coordinate
�
15 . Advantages of Spherical/Polar
1. Minimal structural complexities
2. Short joint travel for many motions - good reach
3. Compatible with other robot and machines in
common work space
4. Good resolution because errors in position are
perpendicular
�
16 . Questions and Problems
1. Discuss advantages and disadvantages of Cartesian, Cylindrical and
Spherical Robot Arms
2. Compare the above three designs from the point of view of building
such a robot arm in our lab using inexpensive components.
3. Invent an arm that is different from all three above. The same
number of degree of freedom but other arrangement and other
motion types in each DOF.
4. Discuss the envelopes (work volumes) of each robot from the point
of view of using it in robot theatre.
5. Assuming that you remember about basic high school mechanics
like lever, gears and pulleys, perform power/torque/linkage
calculations for the Cylindrical and Spherical robot arms. If you
forgot, read the material from the forthcoming lectures.
�