展开查看详情
1 . Dynamixel Modules
Company Robotis
- Serially controller servo motors
- Defacto Industry standard
- used be ~80% RoboCup Teams that build robots
�
2 . 3.2 Dynamixels
• Two types of dynamixels are available for Bioloid GP – AX-12,
AX-12 and AX-18.
AX-18
• Dynamixels are complex actuators for robot servo.
• Use daisy-chainable bus connections of 1-3 mbps.
• The dynamixels receives digital commands of a serial nature,
• process
• and send a status signal back to the device.
• Dynamixels work with CM-5, CM-530, or higher level controller well through TTL
network protocol of RS485 using USB2Dynamixel adapter.
• It is found that dynamixels will be automatically shut down if overloaded for 30%
to 40% of its torque.
• There are multiple supporting programming languages including C/C++, Java,
Python, C#, Matlab, Labview Visual Studio, etc..
�
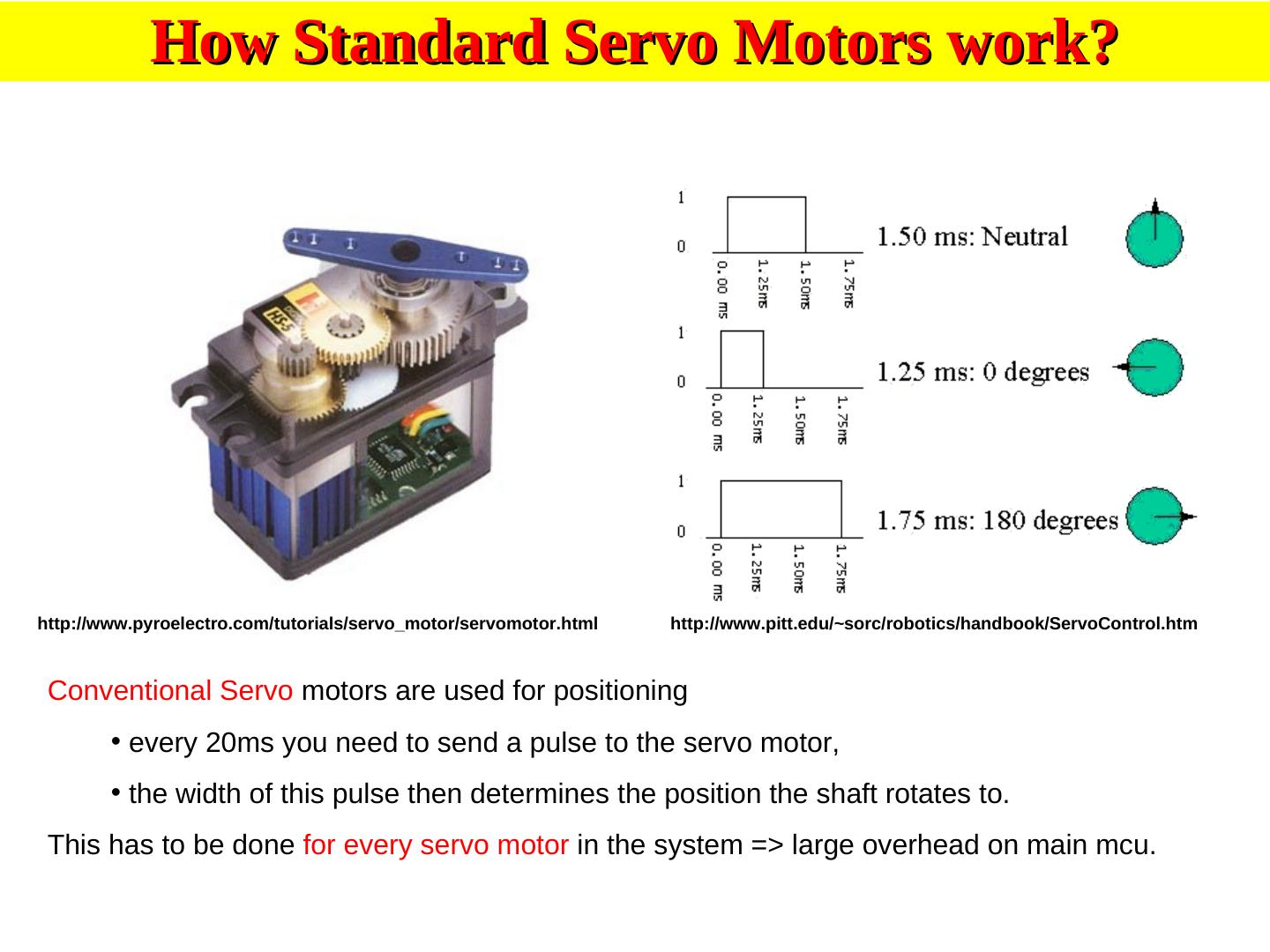
3 . How Standard Servo Motors work?
http://www.pyroelectro.com/tutorials/servo_motor/servomotor.html http://www.pitt.edu/~sorc/robotics/handbook/ServoControl.htm
Conventional Servo motors are used for positioning
• every 20ms you need to send a pulse to the servo motor,
• the width of this pulse then determines the position the shaft rotates to.
This has to be done for every servo motor in the system => large overhead on main mcu.
�
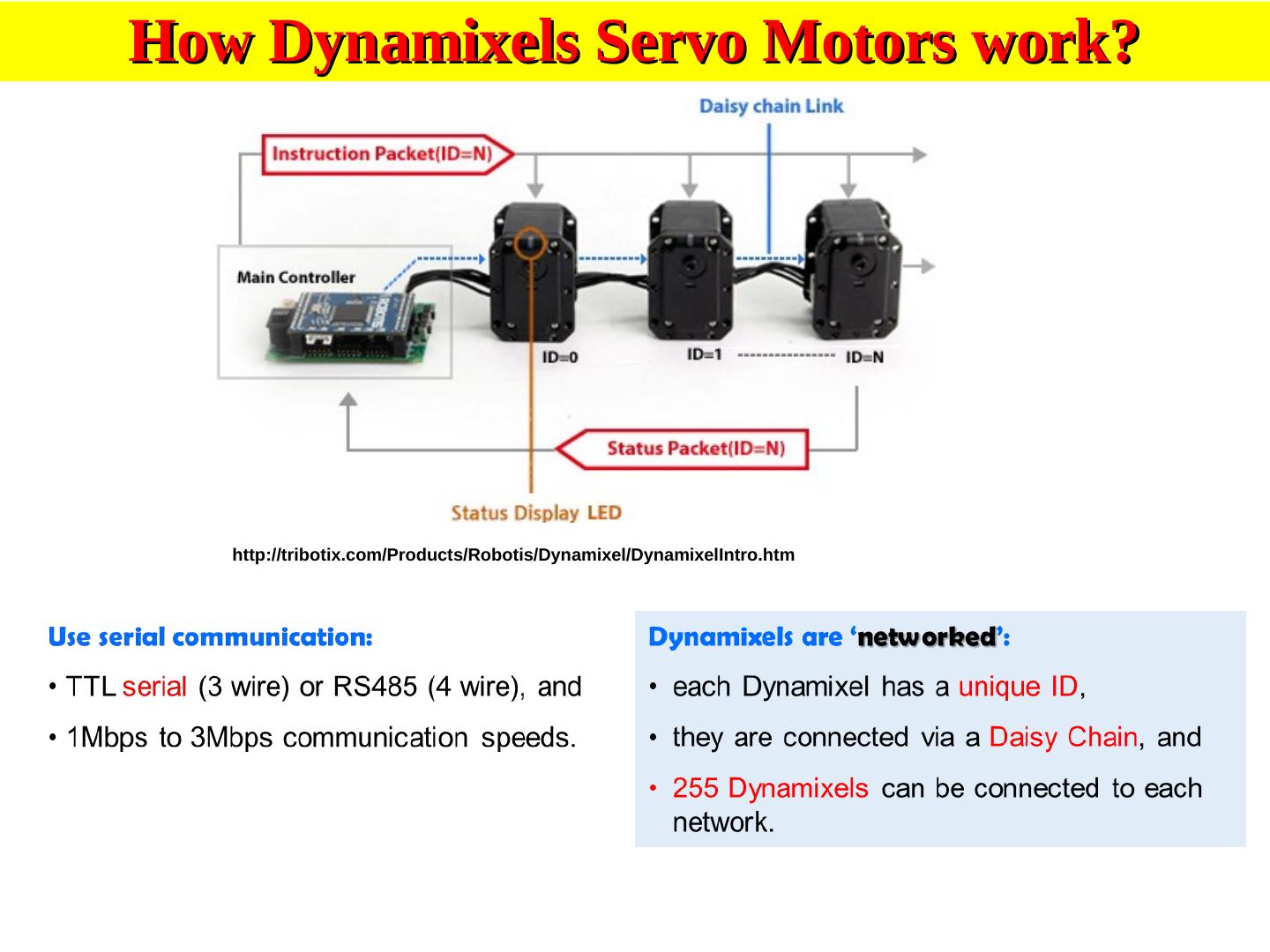
4 .How Dynamixels Servo Motors work?
http://tribotix.com/Products/Robotis/Dynamixel/DynamixelIntro.htm
�
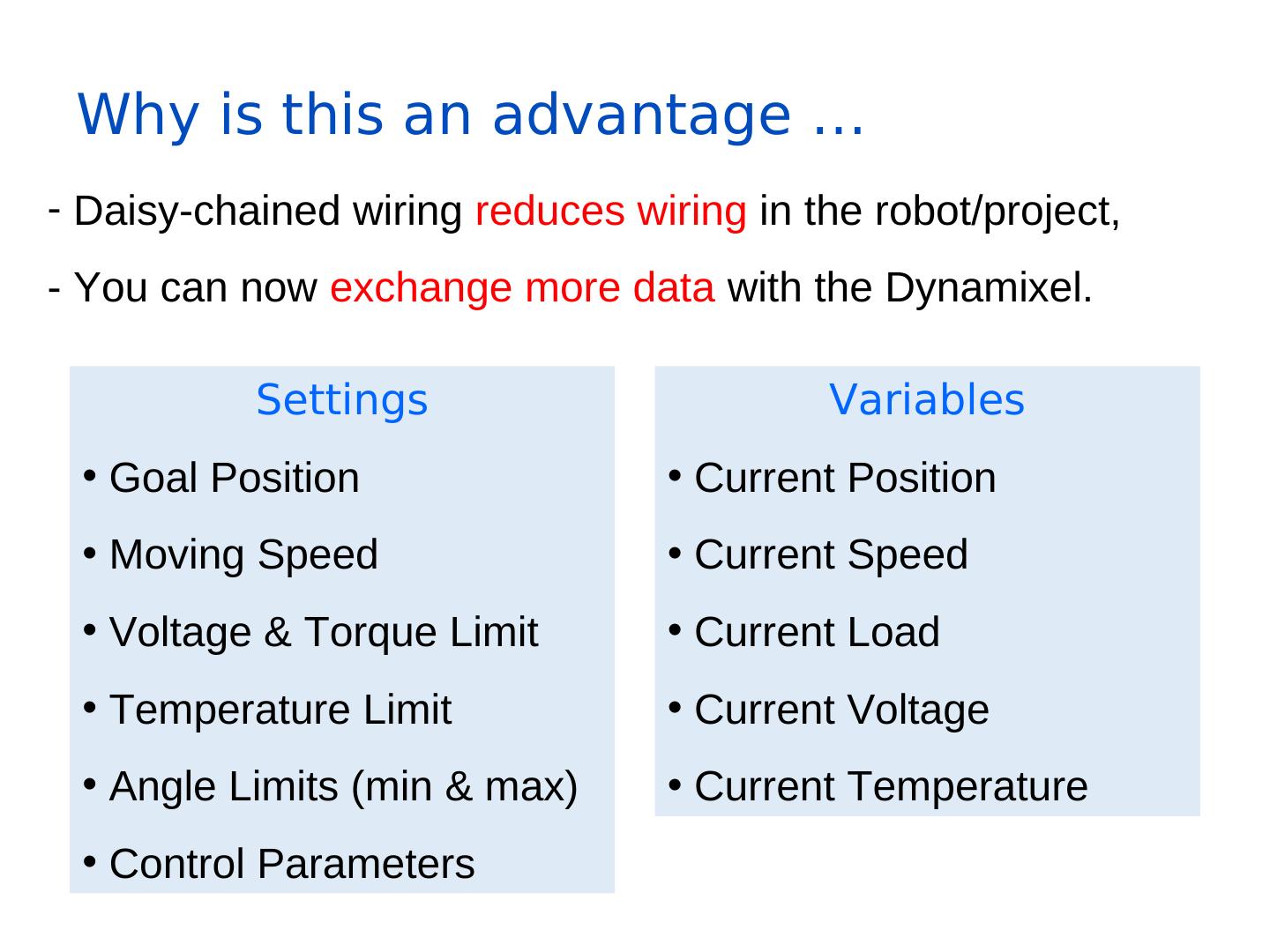
5 . Why is this an advantage …
- Daisy-chained wiring reduces wiring in the robot/project,
- You can now exchange more data with the Dynamixel.
Settings Variables
• Goal Position • Current Position
• Moving Speed • Current Speed
• Voltage & Torque Limit • Current Load
• Temperature Limit • Current Voltage
• Angle Limits (min & max) • Current Temperature
• Control Parameters
�
6 .Control Parameters ….
CW – clockwise
CCW – counter clockwise
1. Compliance
2. PID Control
�
7 . Again - why are these advantages ….
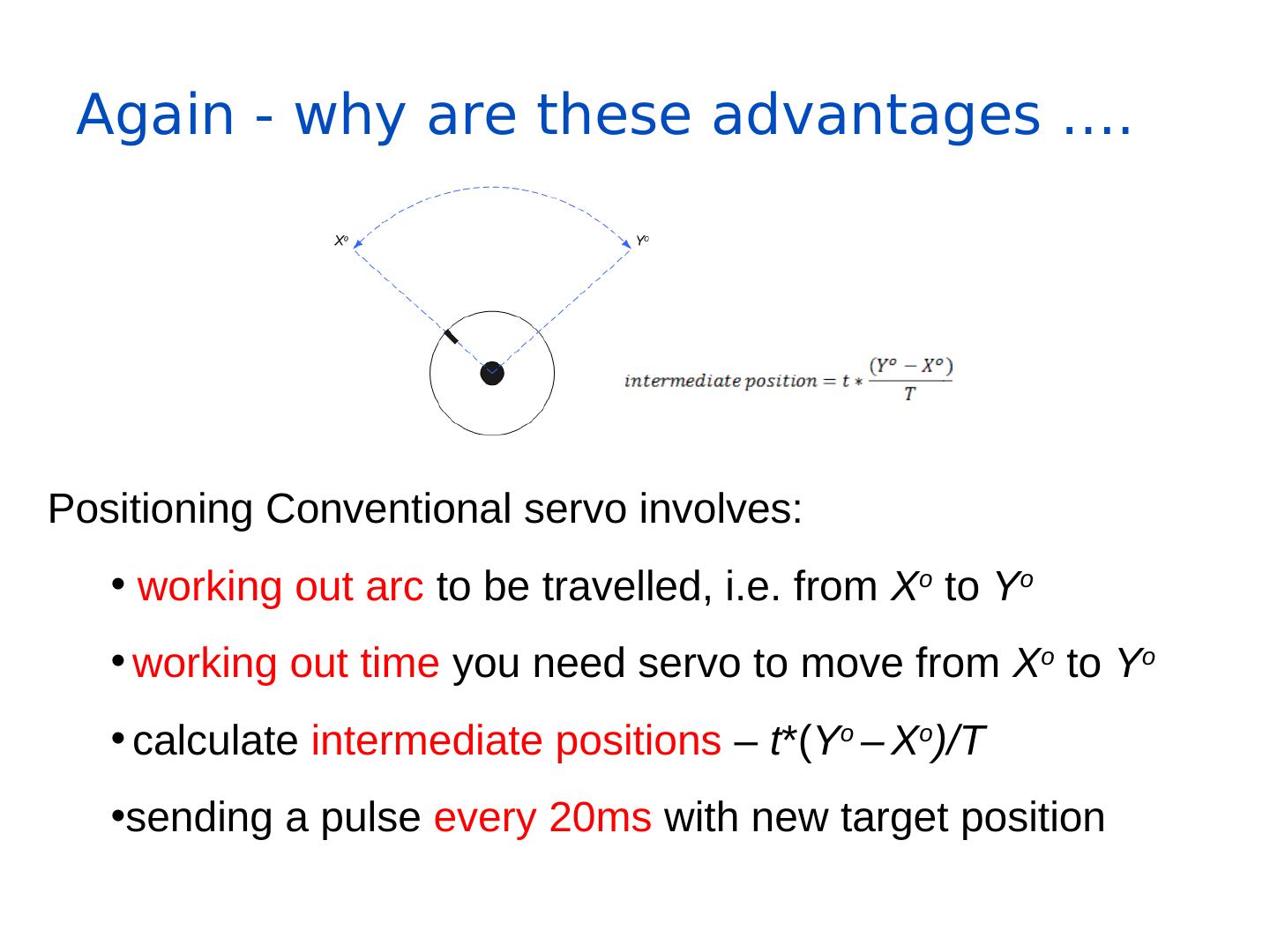
Positioning Conventional servo involves:
• working out arc to be travelled, i.e. from Xo to Yo
• working out time you need servo to move from Xo to Yo
• calculate intermediate positions – t*(Yo – Xo)/T
•sending a pulse every 20ms with new target position
�
8 . Again - why are these advantages ….
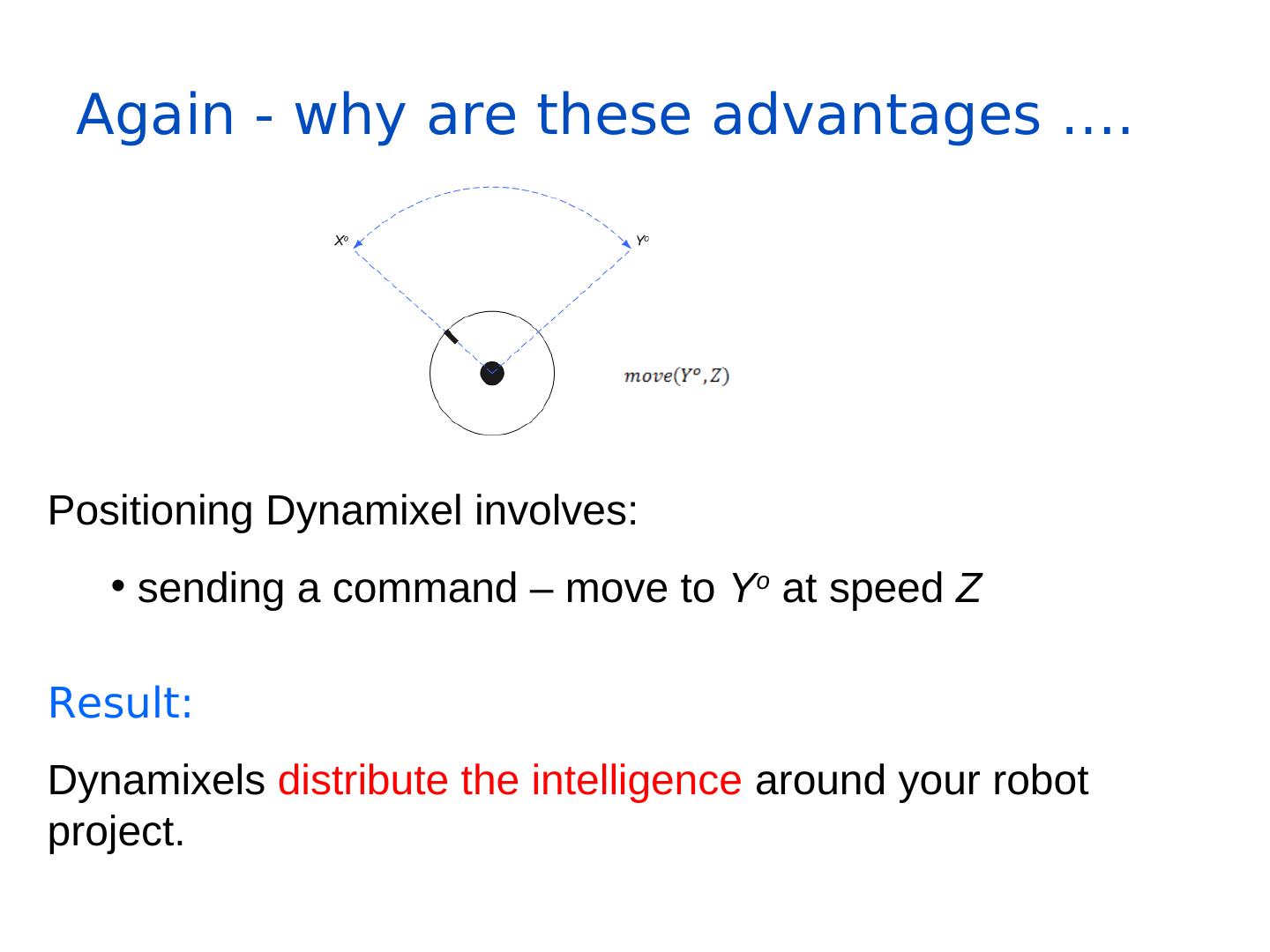
Positioning Dynamixel involves:
• sending a command – move to Yo at speed Z
Result:
Dynamixels distribute the intelligence around your robot
project.
�
9 . There are other advantages …
360o Rotating mode
Dynamixels can be used as a rotating motor at a number
of speeds.
Torque OFF mode
motors shaft can be moved whilst recording shaft position
…. ability to teach & repeat sequences easily.
�
10 . Why are Dynamixels ideal for Robotics
…
1. Daisy-chained wiring reduces wiring in the robot project,
2. Intelligence is distributed,
3. Commands are simplified,
4. Parameters can be monitored in real time,
5. Setting can be made within Dynamixel to physically protect itself,
6. Each Dynamixel module can be tuned by either Complaince or PID Control
techniques,
7. Use Torque OFF mode to ‘teach’ robot movement sequences.
�
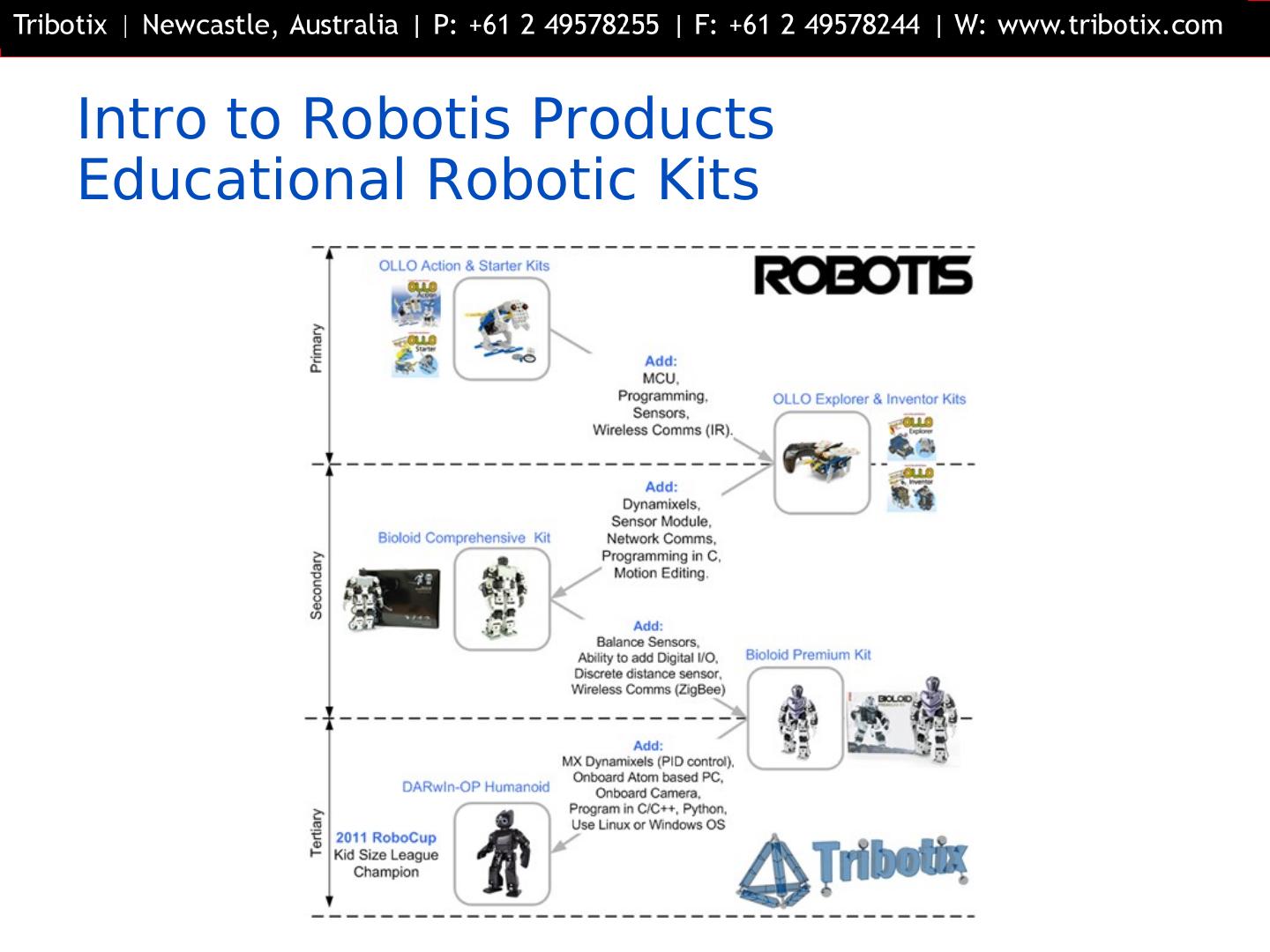
11 .Intro to Robotis Products
Educational Robotic Kits
�
12 .2.3 Bioloid
•Robotis supports multiple versions of Bioloid kit from beginner,
comprehensive, expert to premium.
•In the humanoid style, it supports premium, GP and Darwin.
2.3.1 Bioloid Preminum
Bioloid premium is a medium level robot kit for
hobbies, educators and researchers.
The central unit of the
premium is CM-530 controller [12, 13], which allows the user
to easily connect the AX-12A servo motors, the sensors and
any communication devices that are needed by the project.
Each accessory has a unique ID so that configuration of the
system will be unambiguous.
�
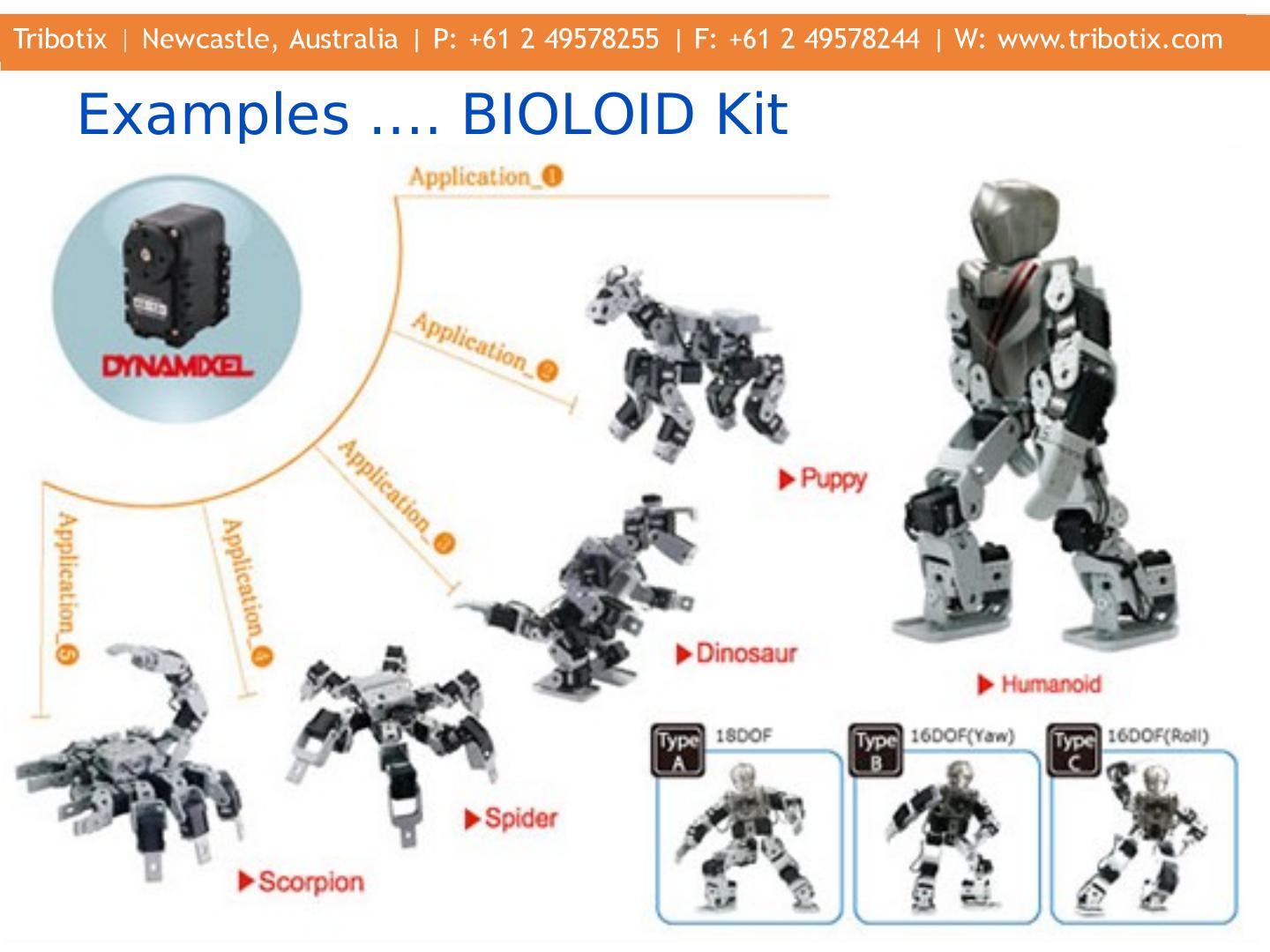
13 .Dynamixel AX-12A is an
integrated motor with several features, such as:
• position and speed can be controlled in 1024 steps,
• feedback for angular position, angular velocity, and load torque can be
set up in the motion,
•wiring is with daisy chain connection and supports many dynamixel
units with very few resources.
•Three types of assembly construction were provided.
•In addition, 23 other types of assembly are supported.
•The limitation is the actuators in this level does not support enough
torque therefore some of the pose cannot be completed in a type of
assembly.
�
14 .Examples …. BIOLOID Kit
�
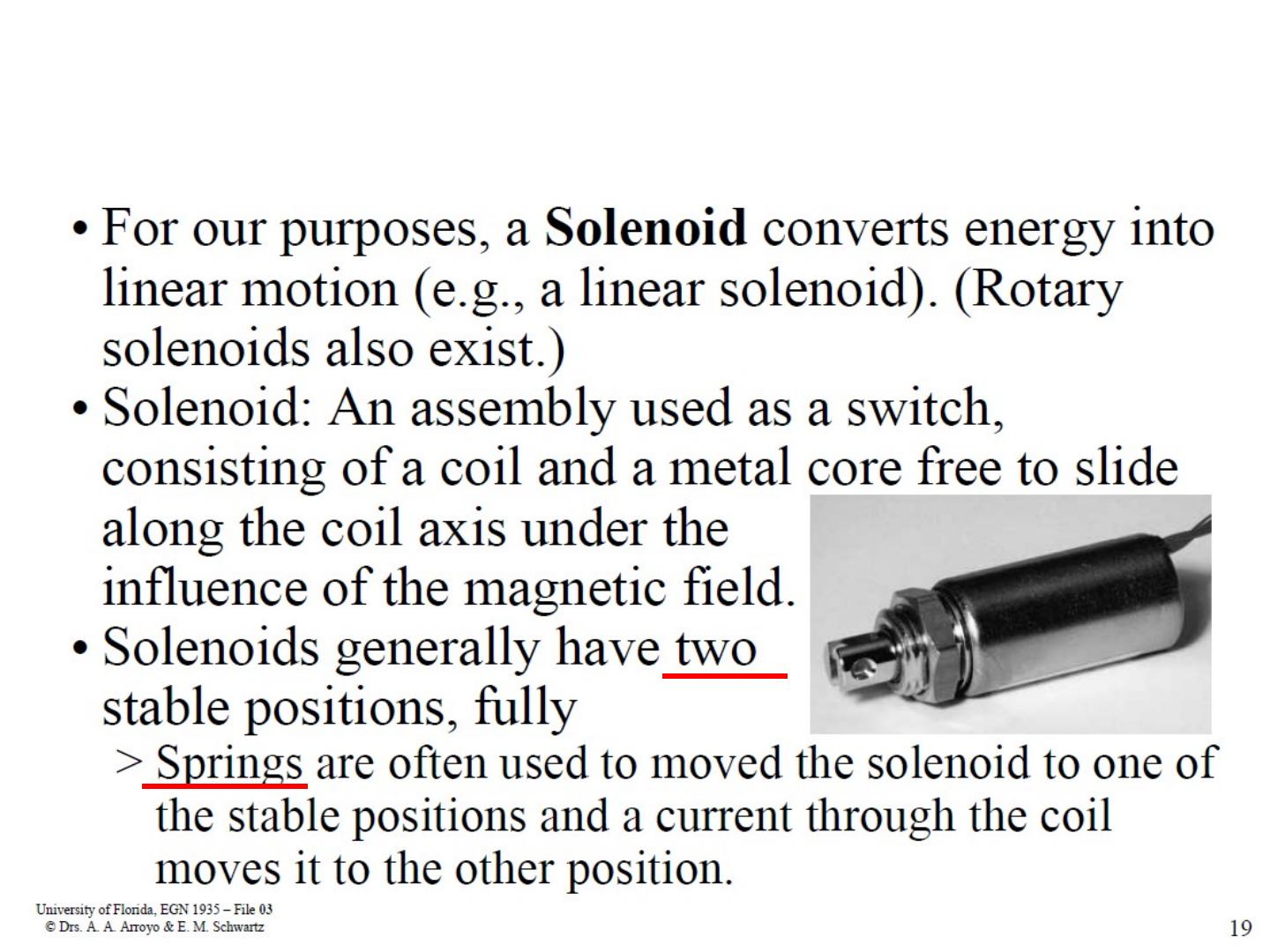
15 . Solenoids
Plunger attracted or repelled by current through
a coil.
May be driven by a relay or transistor.
�