





- 快召唤伙伴们来围观吧
- 微博 QQ QQ空间 贴吧
- 文档嵌入链接
- 复制
- 微信扫一扫分享
- 已成功复制到剪贴板
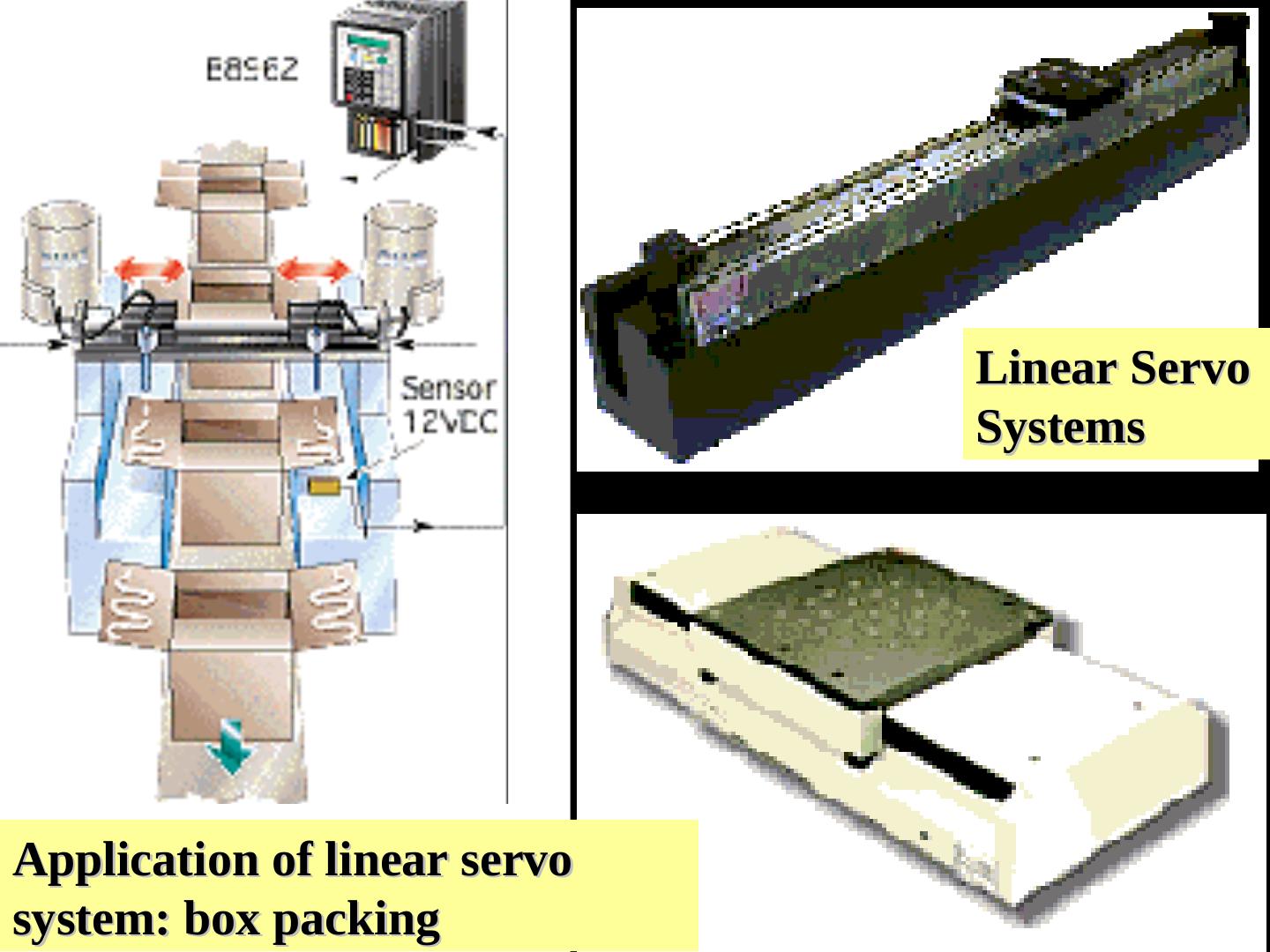
35_Servos and Control- applications
Forward and Inverse Kinematics – Next quarter
PID Control
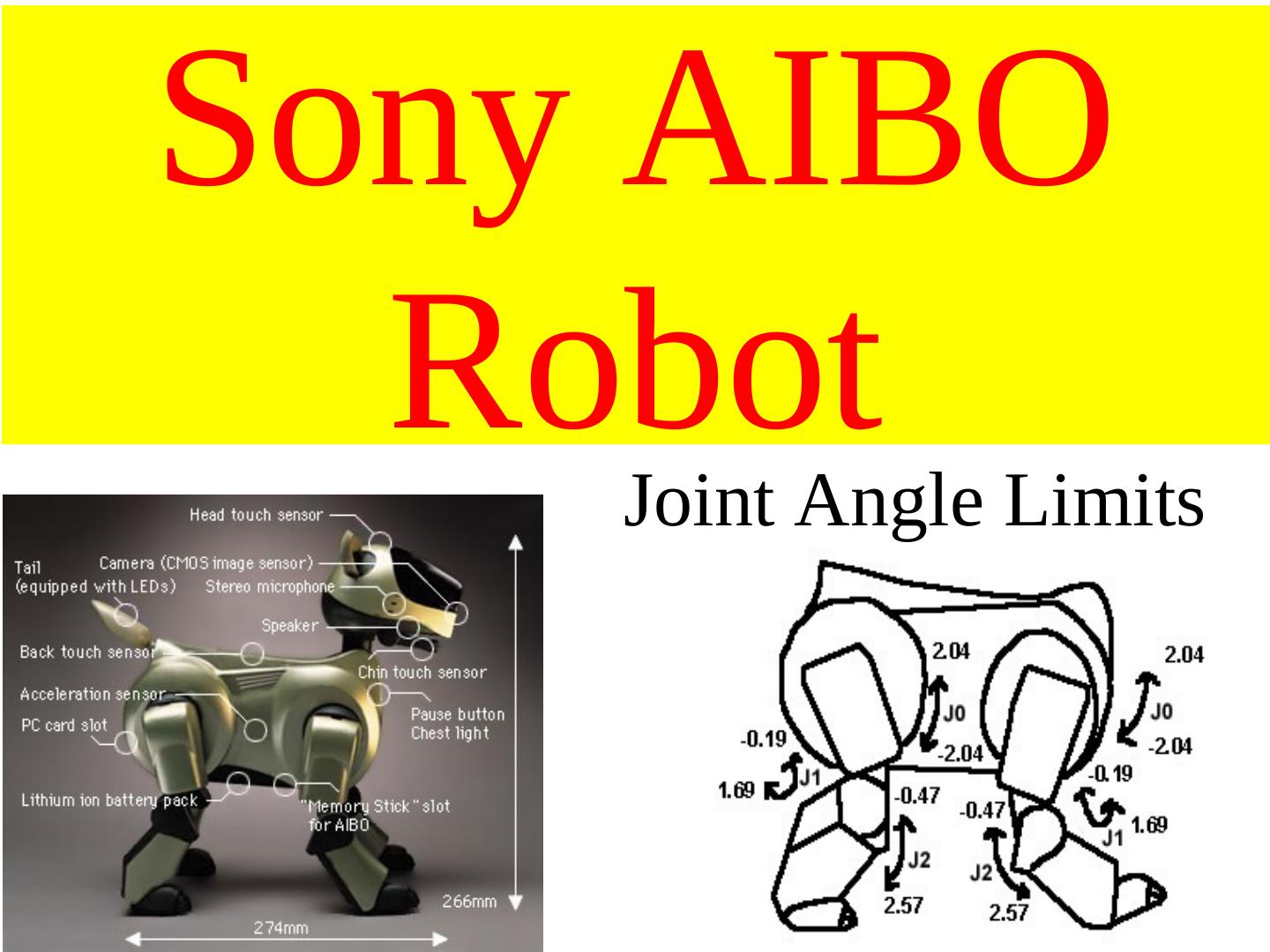
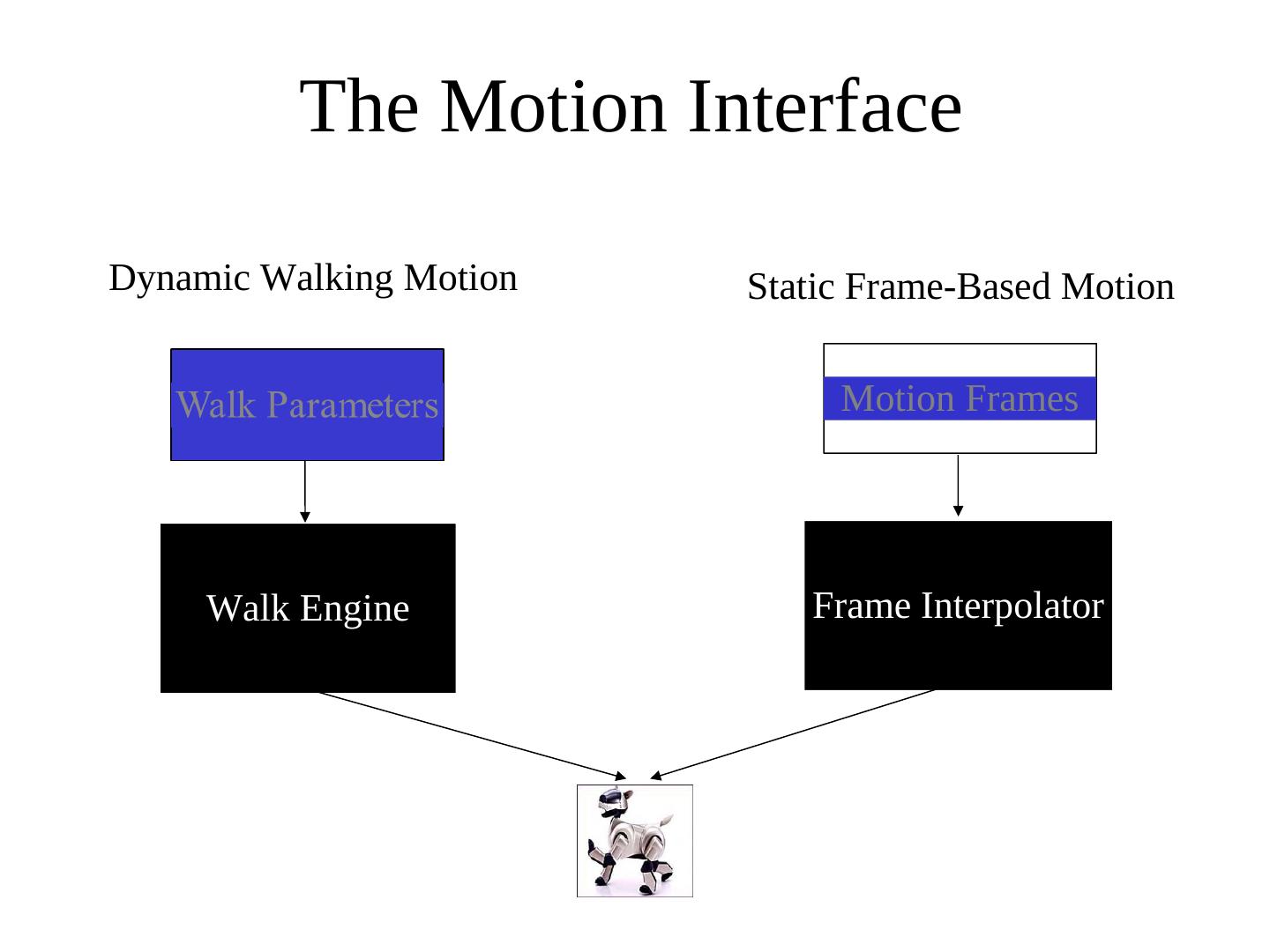
Frame-Based Motions on the AIBO
Modeling Effects of Motions
展开查看详情
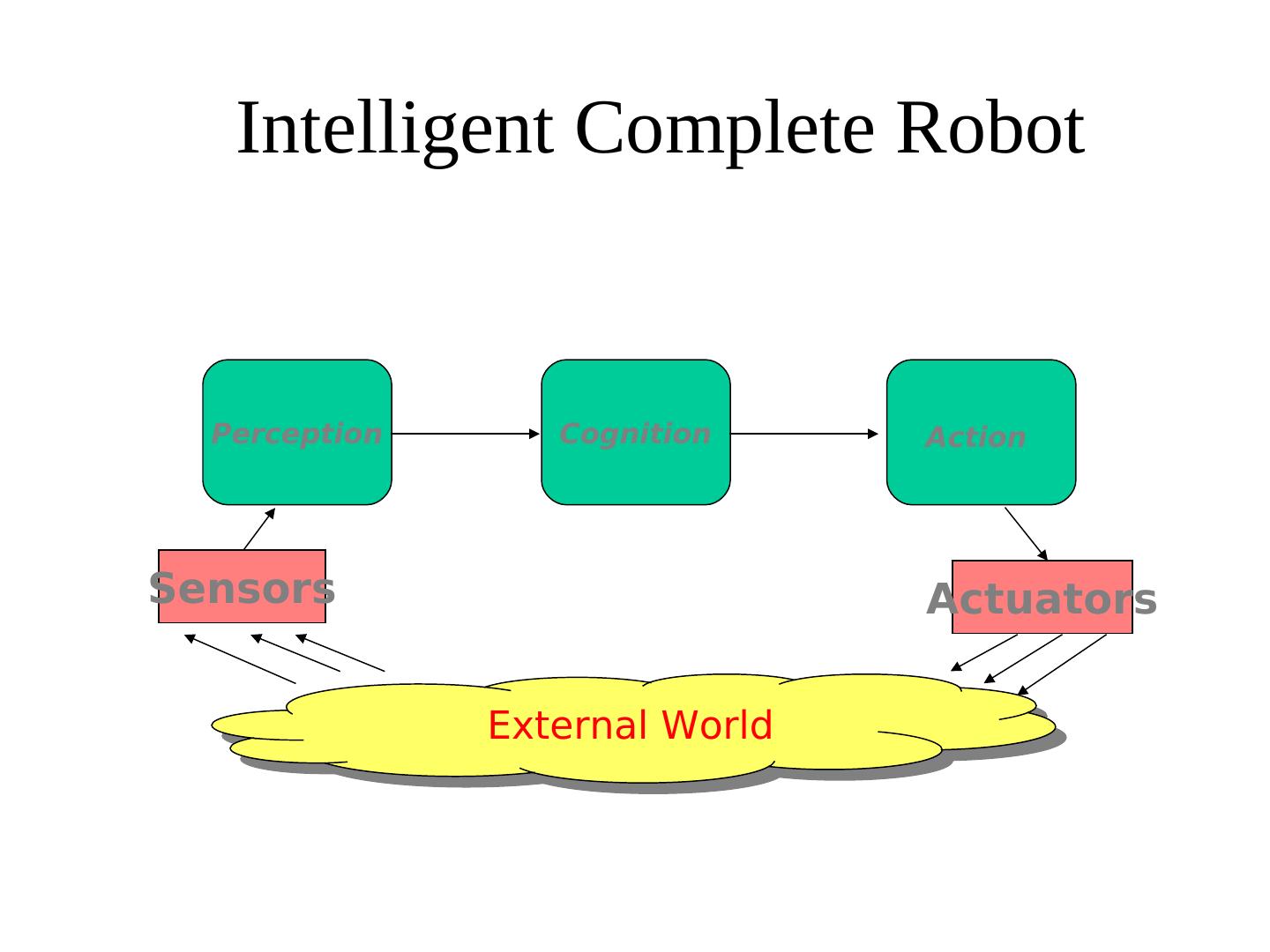
1 . Robot Motion • Forward and Inverse Kinematics – Next quarter • PID Control • Frame-Based Motions on the AIBO • Modeling Effects of Motions
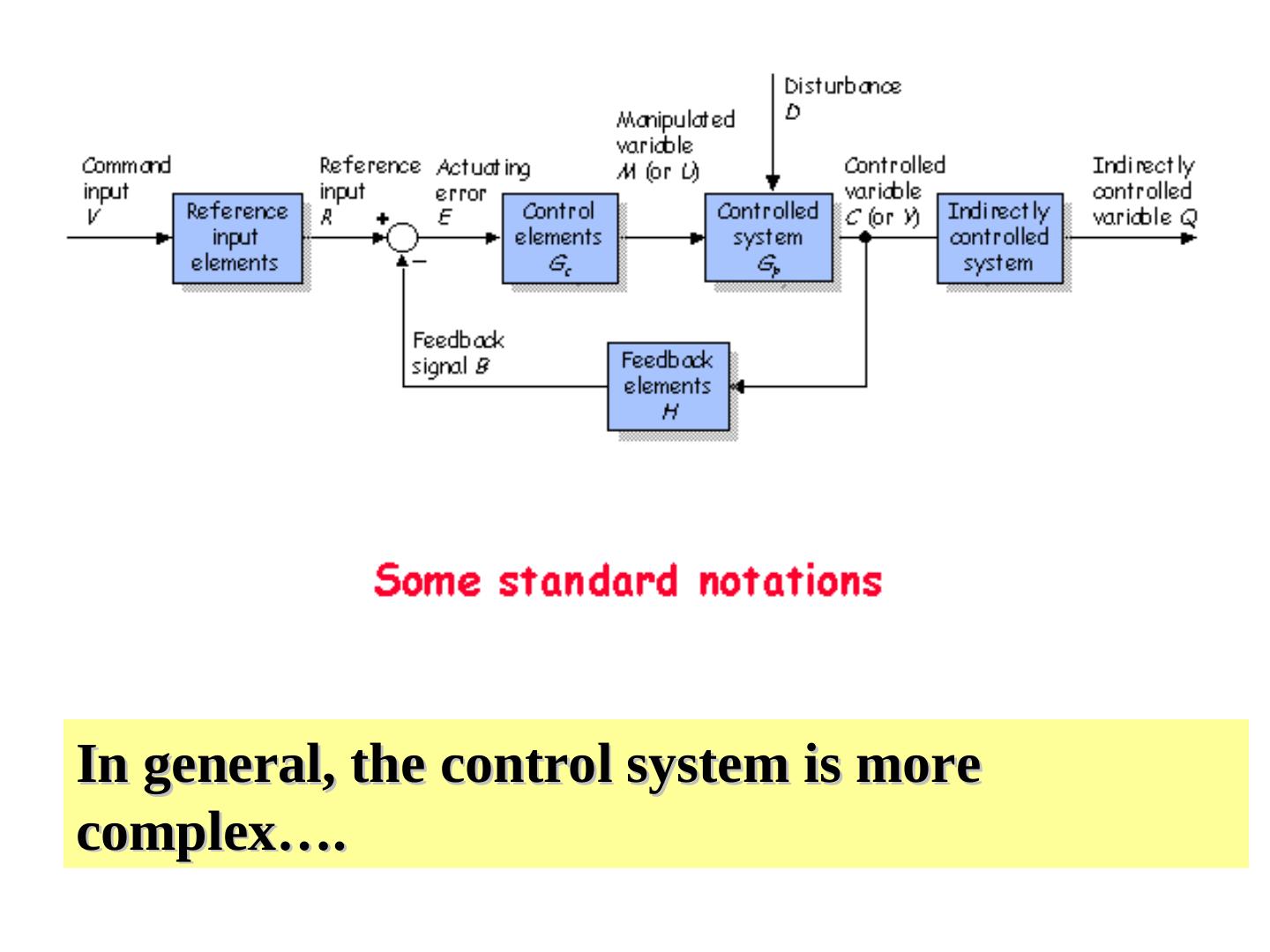
2 . Automatic Control Systems, Servos, Automatic Tracking, Feedback Control
3 .VOCABULARY: Automatic Control Systems Automatic: able to activate, move or regulate itself. Control: command, direct, rule, check, limit, restrain, regulate or operate. System: a group or combination of interrelated, independent, or interacting elements forming a collective entity. • Control engineering is concerned with modifying the behavior of dynamical systems to achieve desired goals.
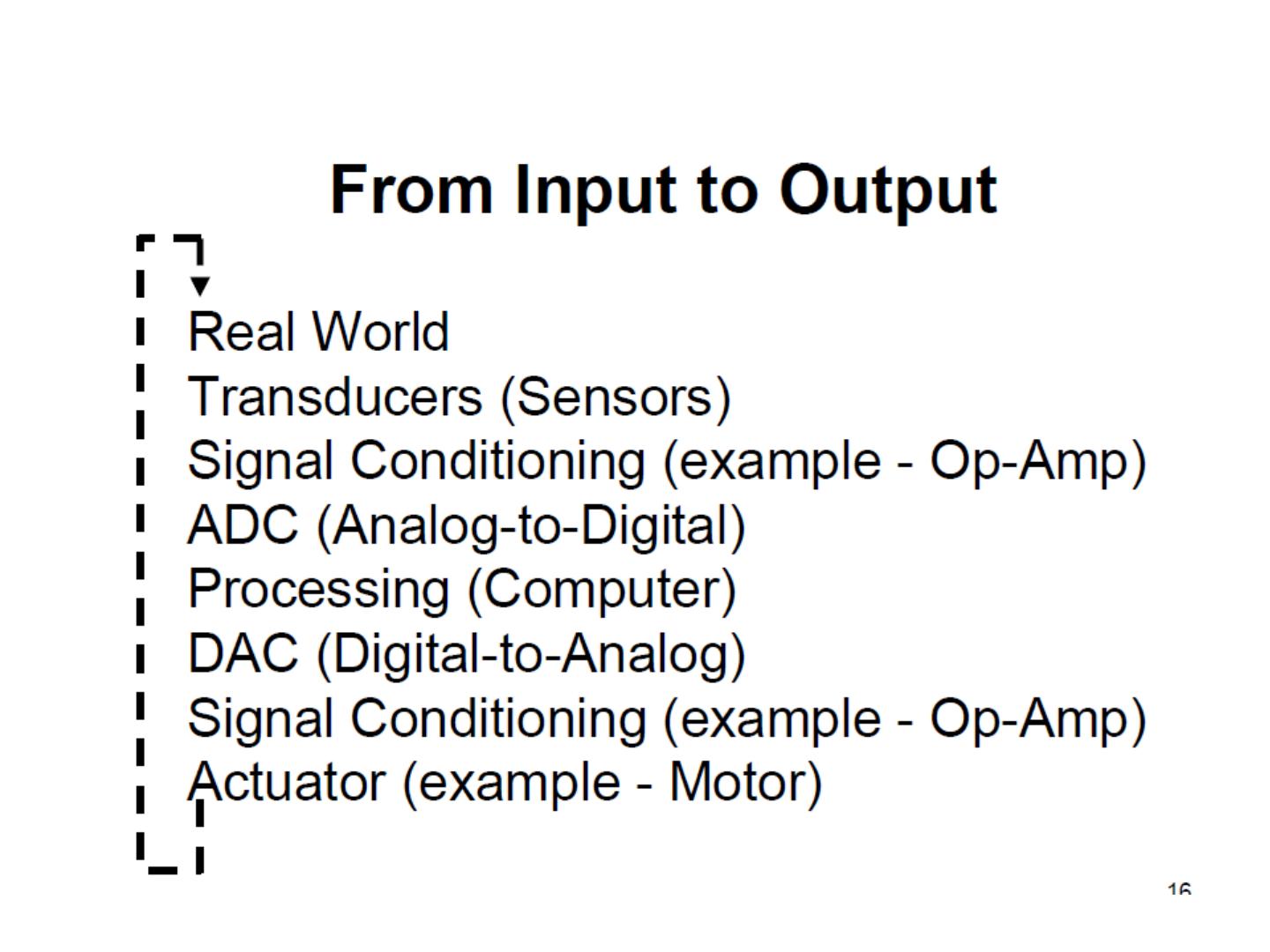
4 . Control System Terminology • Input - Excitation applied to a control system from an external source. • Output - The response obtained from a system • Feedback - The output of a system that is returned to modify the input. • Error - The difference between the input and the output.
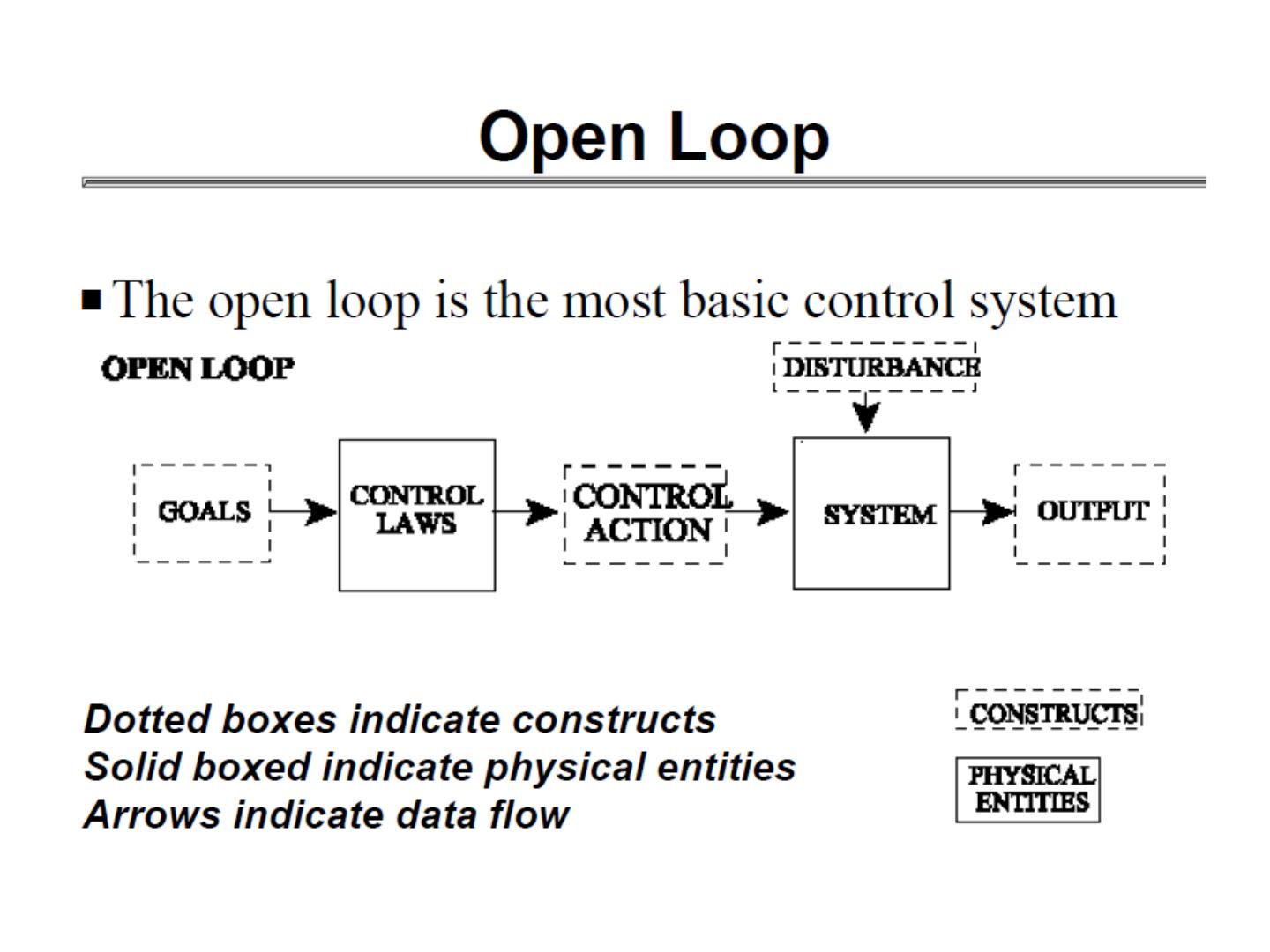
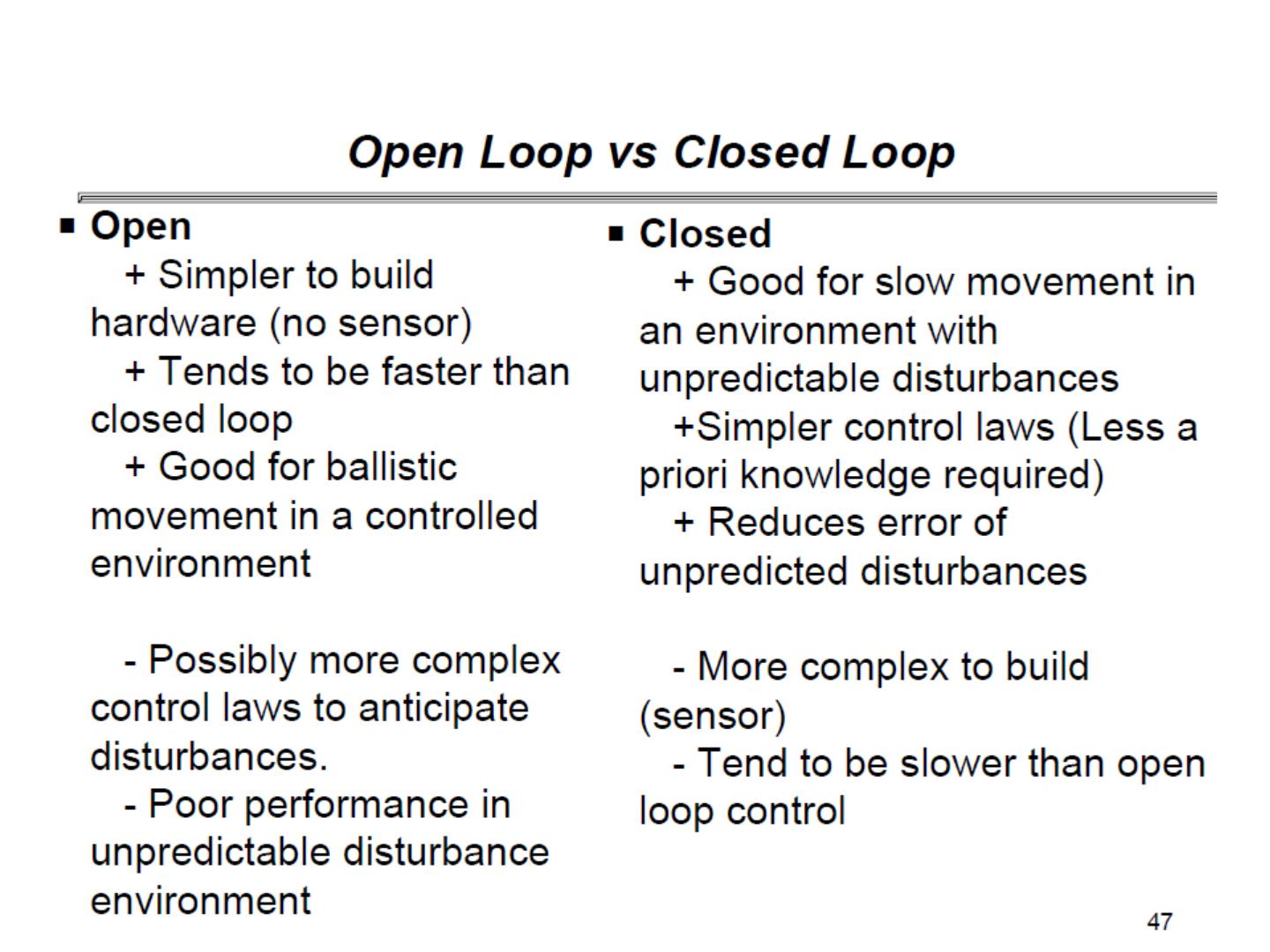
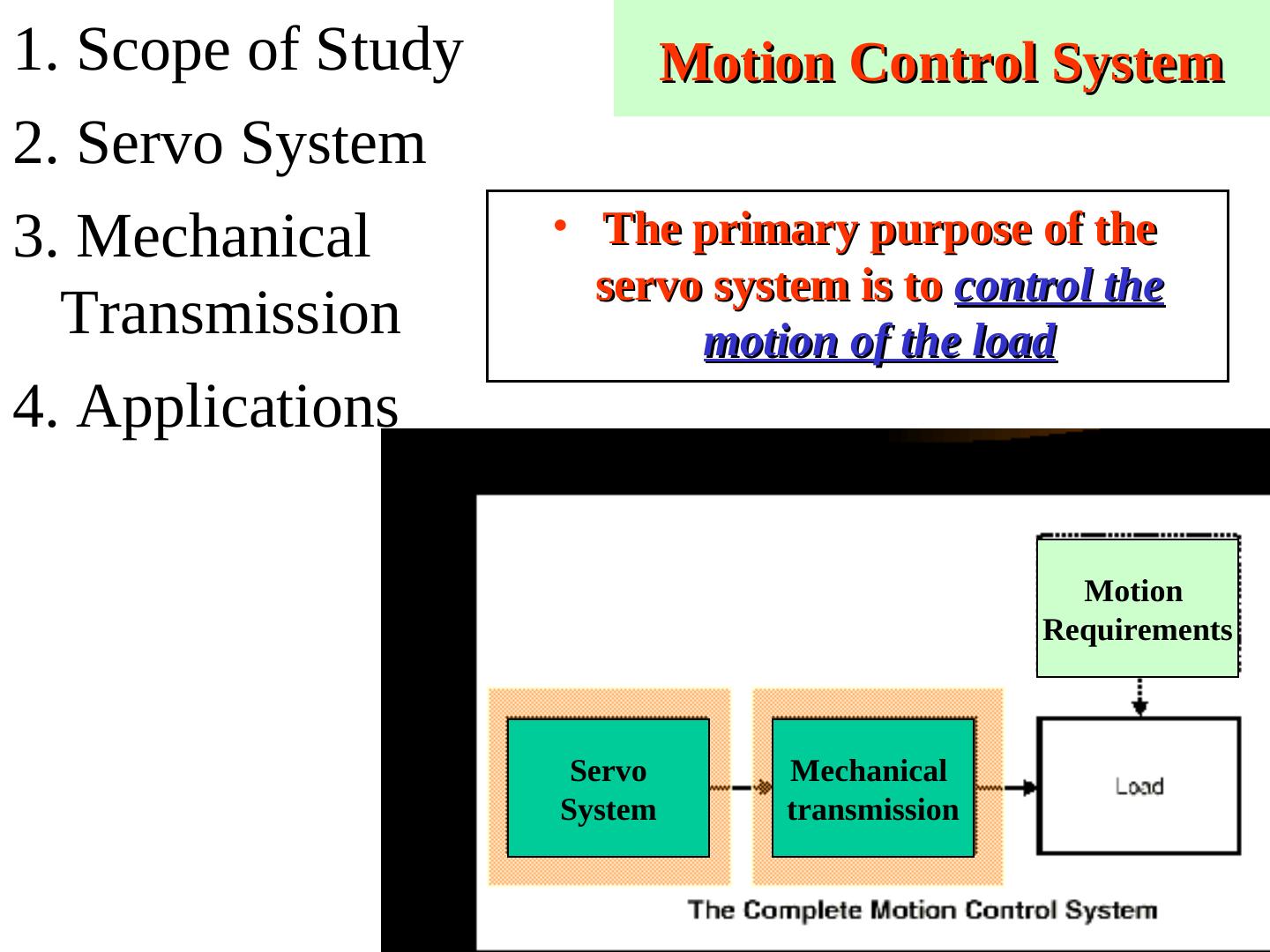
5 . Types of Control Systems • Open-Loop Simple control system which performs its function without concerns for initial conditions or external inputs. Must be closely monitored. • Closed-Loop (feedback) Uses the output of the process to modify the process to produce the desired result. Continually adjusts the process.
6 .Control Systems
7 .Transducer or Sensor Factors
8 .Open Loop Controller
9 .
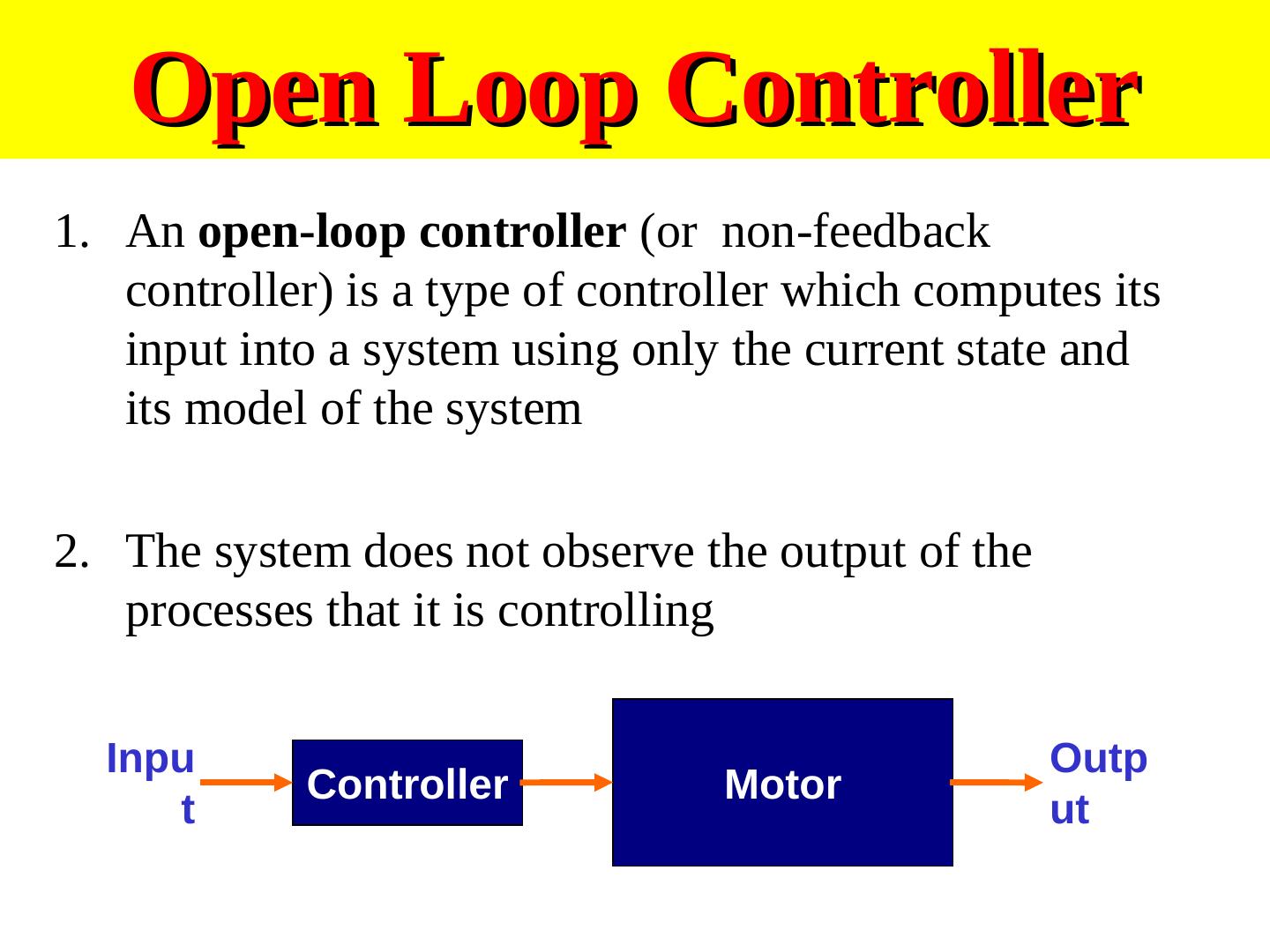
10 . Open Loop Controller 1. An open-loop controller (or non-feedback controller) is a type of controller which computes its input into a system using only the current state and its model of the system 2. The system does not observe the output of the processes that it is controlling Inpu Outp Controller Motor t ut
11 .
12 . Open Loop Controller (cont…) 1. Open-loop control is useful for well-defined systems where the relationship between input and the resultant state can be modeled by a mathematical formula 2. For example determining the voltage to be fed to an electric motor that drives a constant load, in order to achieve a desired speed would be a good application of open-loop control
13 . Open Loop Controller (cont…) 1. An open-loop controller is often used in simple processes because of its simplicity and low-cost, especially in systems where feedback is not critical 2. Generally, to obtain a more accurate or more adaptive control, it is necessary to feed the output of the system back to the inputs of the controller
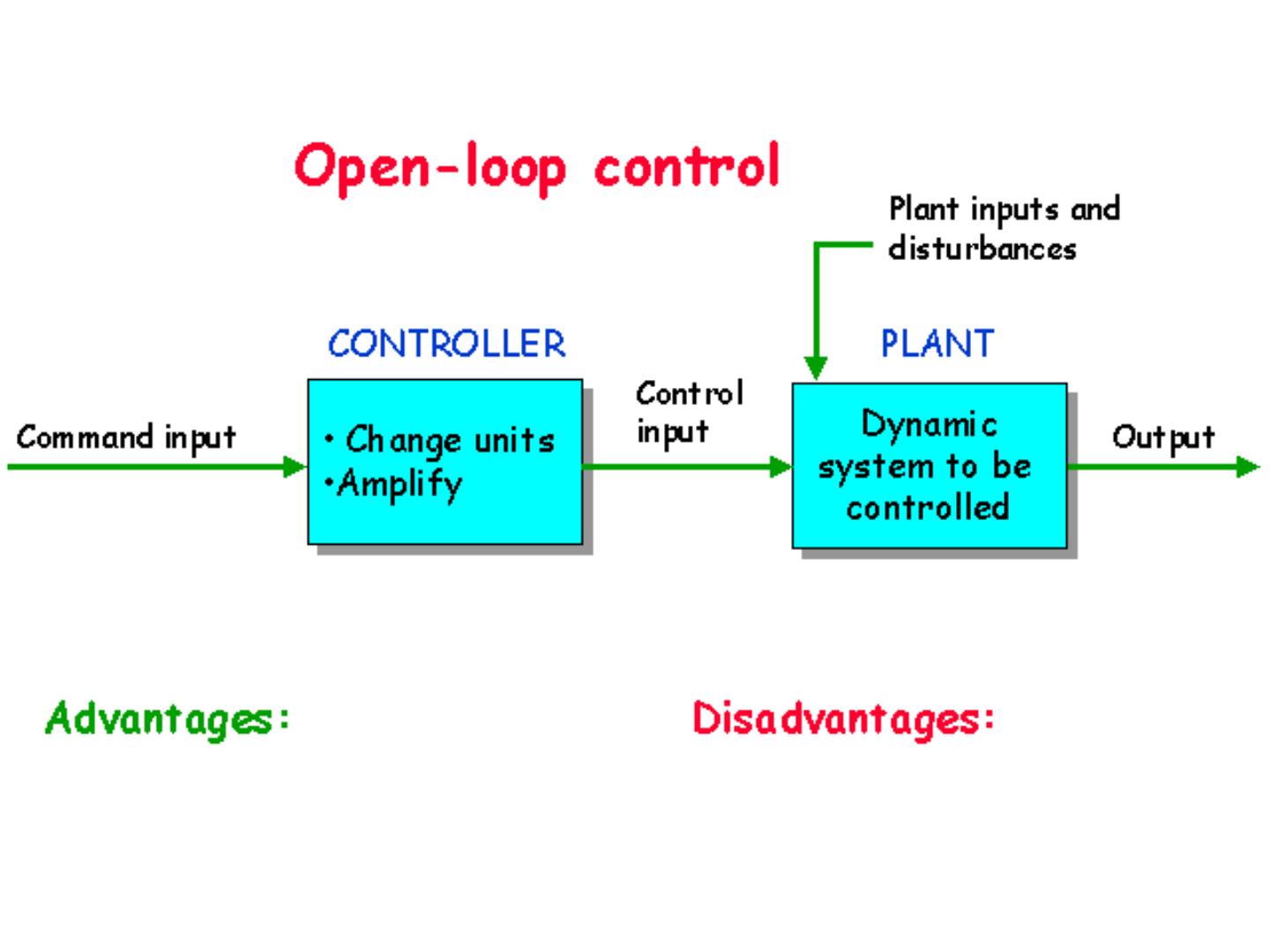
14 . Open-loop control • Advantages: Stability not a problem Cheaper than closed-loop Can be used even if output cannot be measured • Disadvantages: Changes in system or disturbances ? errors Periodic calibration required
15 .Closed Loop Controller
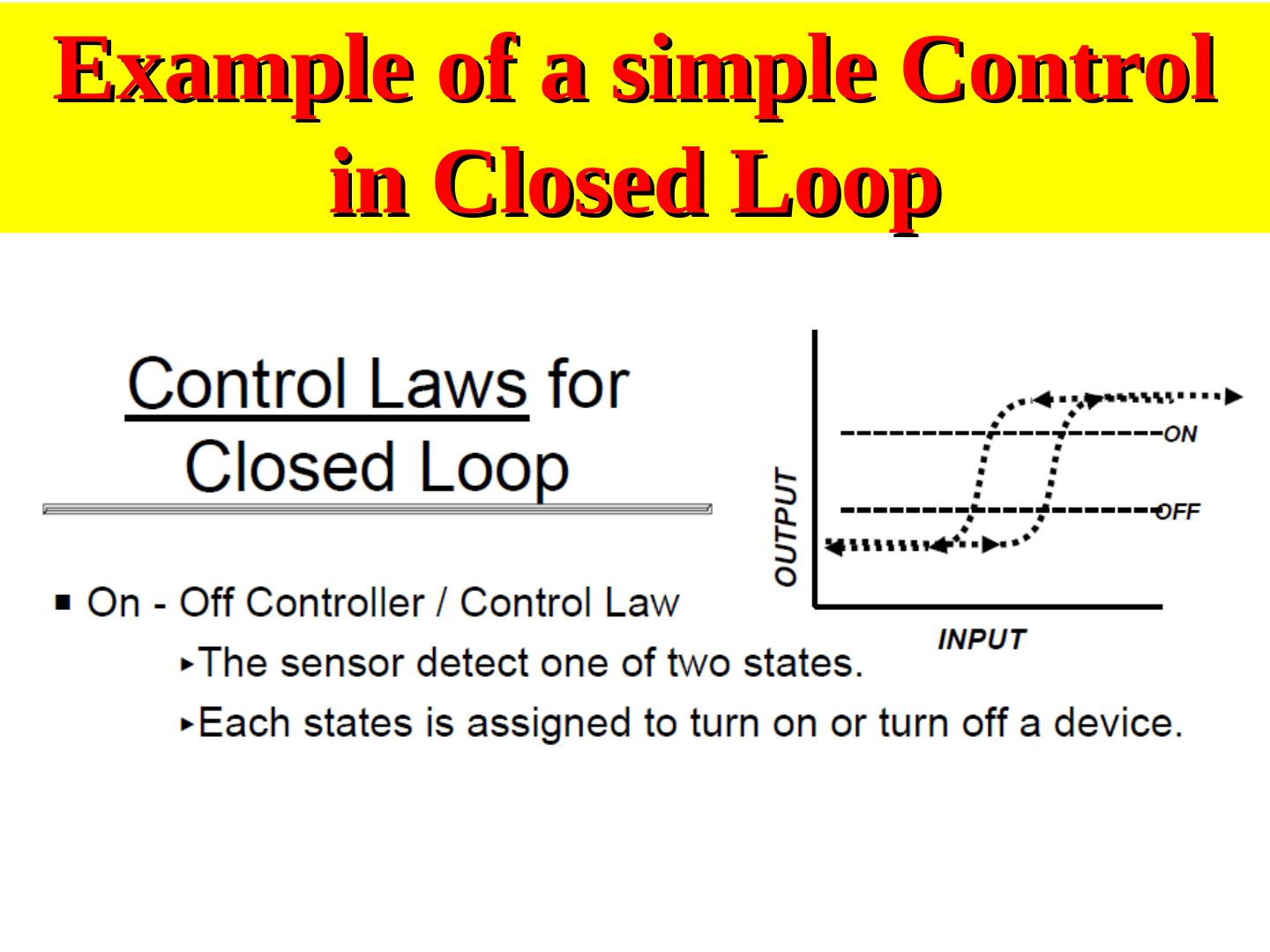
16 .Example of a simple Control in Closed Loop
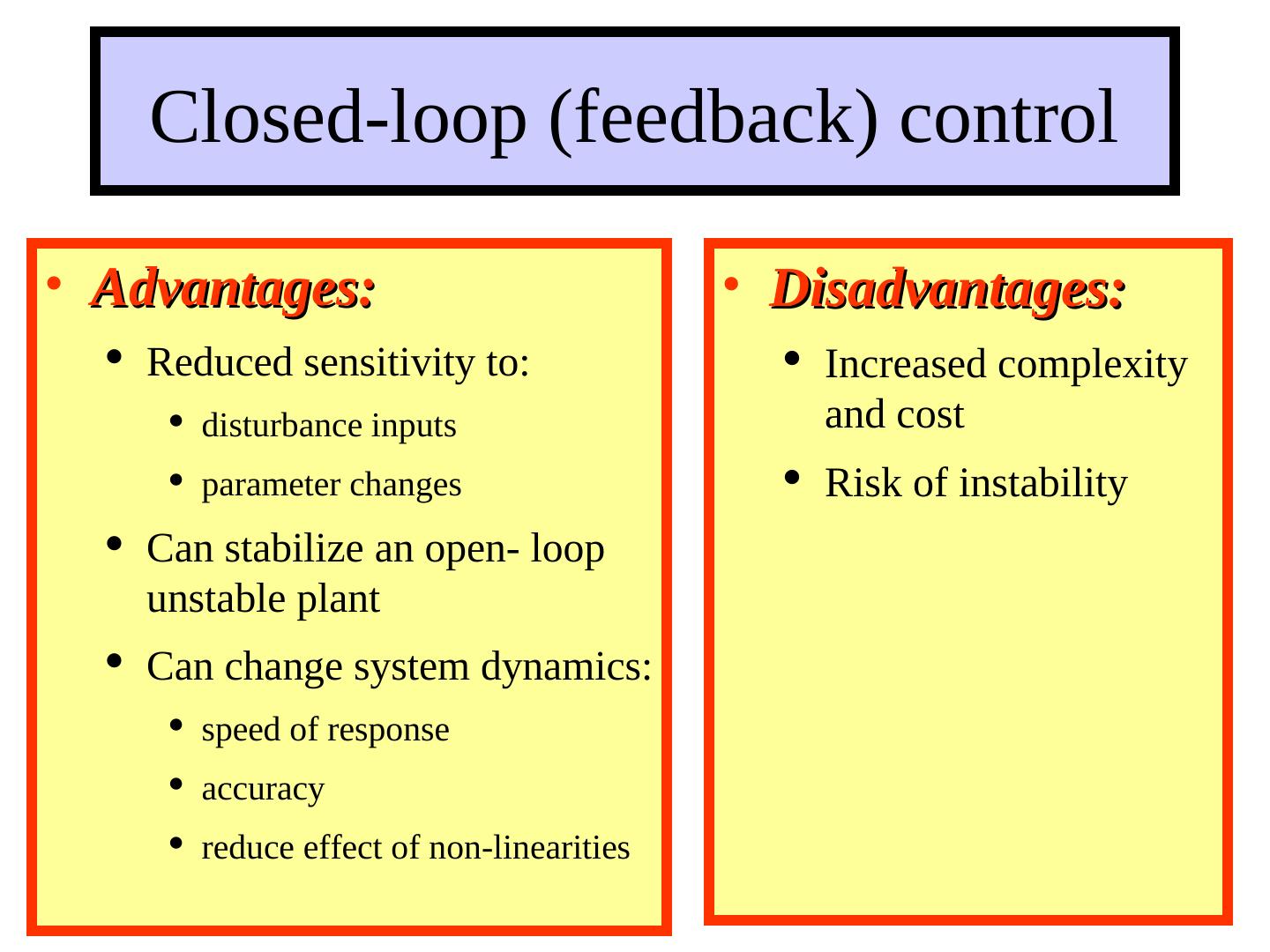
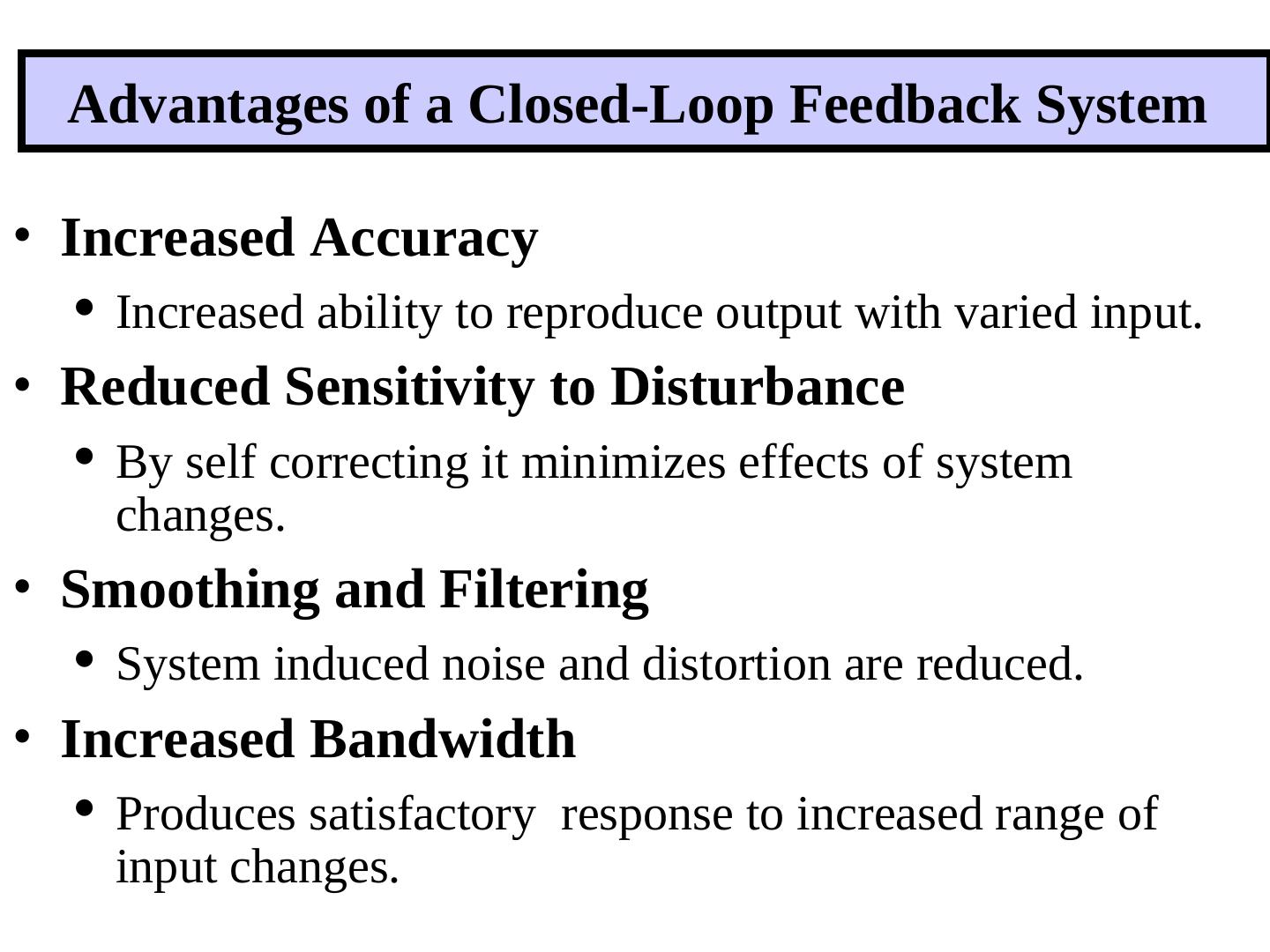
17 . Closed Loop Controller 1. Closed-loop controllers have the following advantages over open- loop controllers: 1. Disturbance rejection (such as unmeasured friction in a motor) 2. Guaranteed performance even with model uncertainties, when the model structure does not match perfectly the real process and the model parameters are not exact 3. Unstable processes can be stabilized 4. Reduced sensitivity to parameter variations 5. Improved reference tracking performance
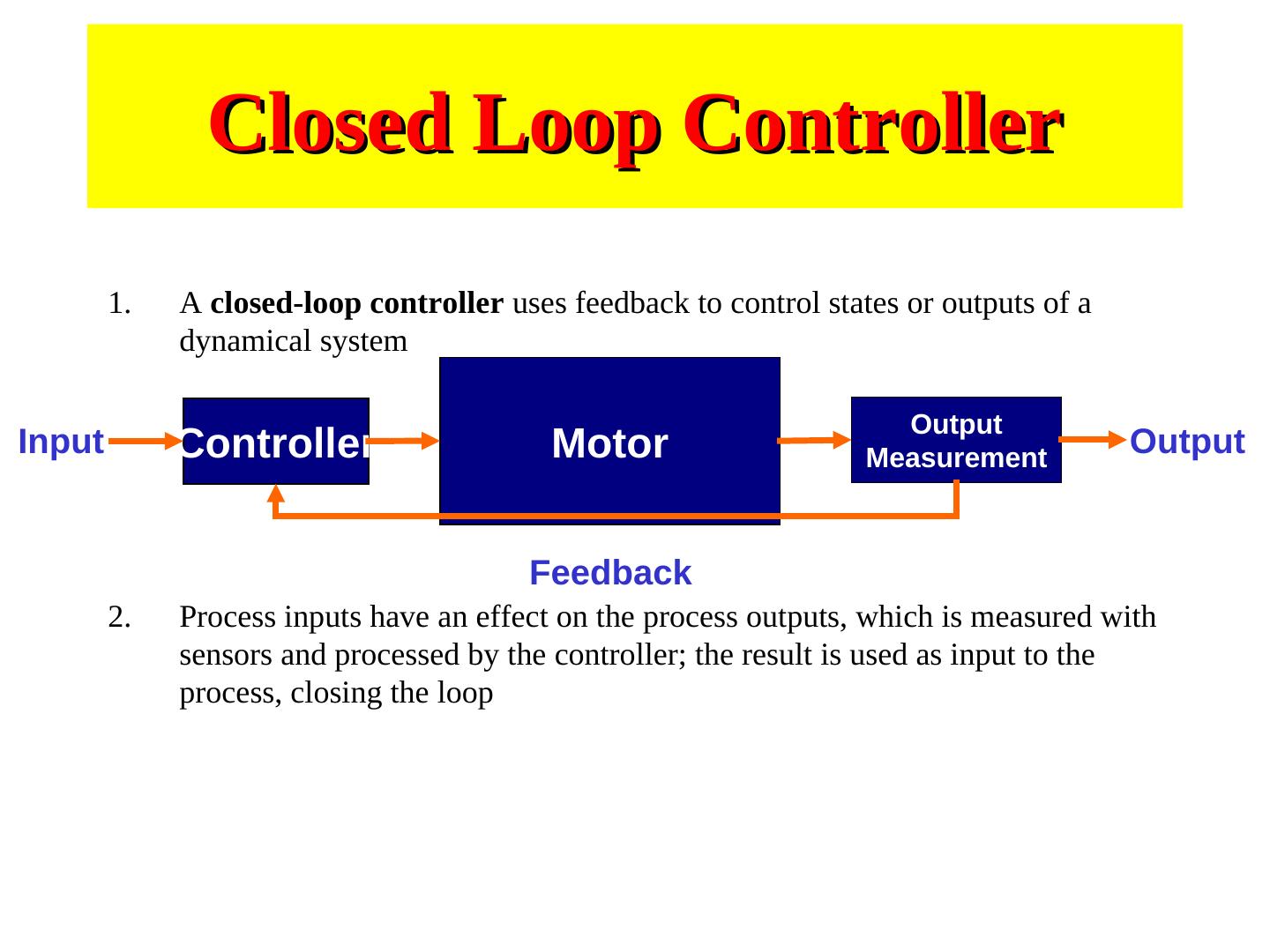
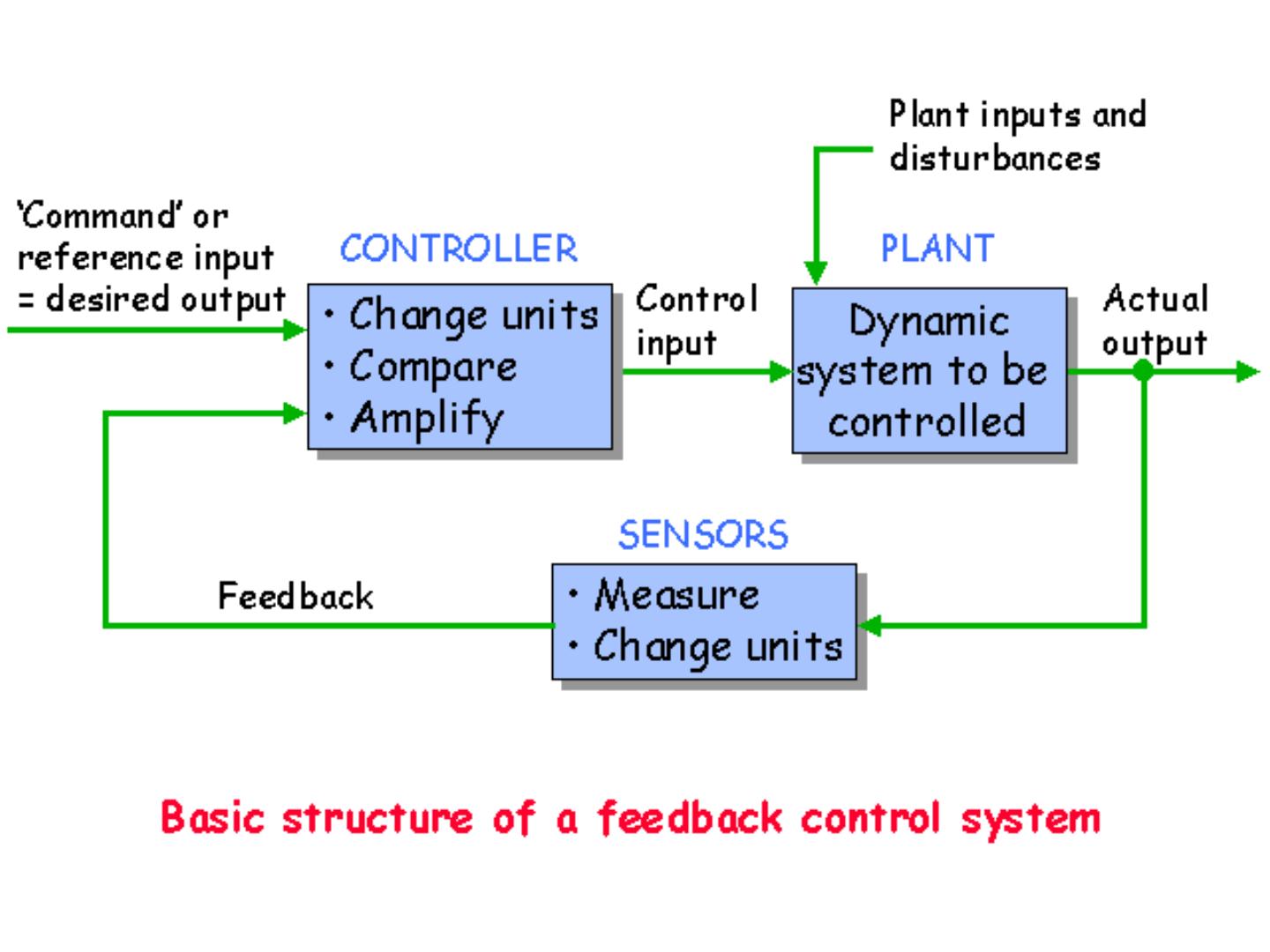
18 . Closed Loop Controller 1. A closed-loop controller uses feedback to control states or outputs of a dynamical system Output Input Controller Motor Measurement Output Feedback 2. Process inputs have an effect on the process outputs, which is measured with sensors and processed by the controller; the result is used as input to the process, closing the loop
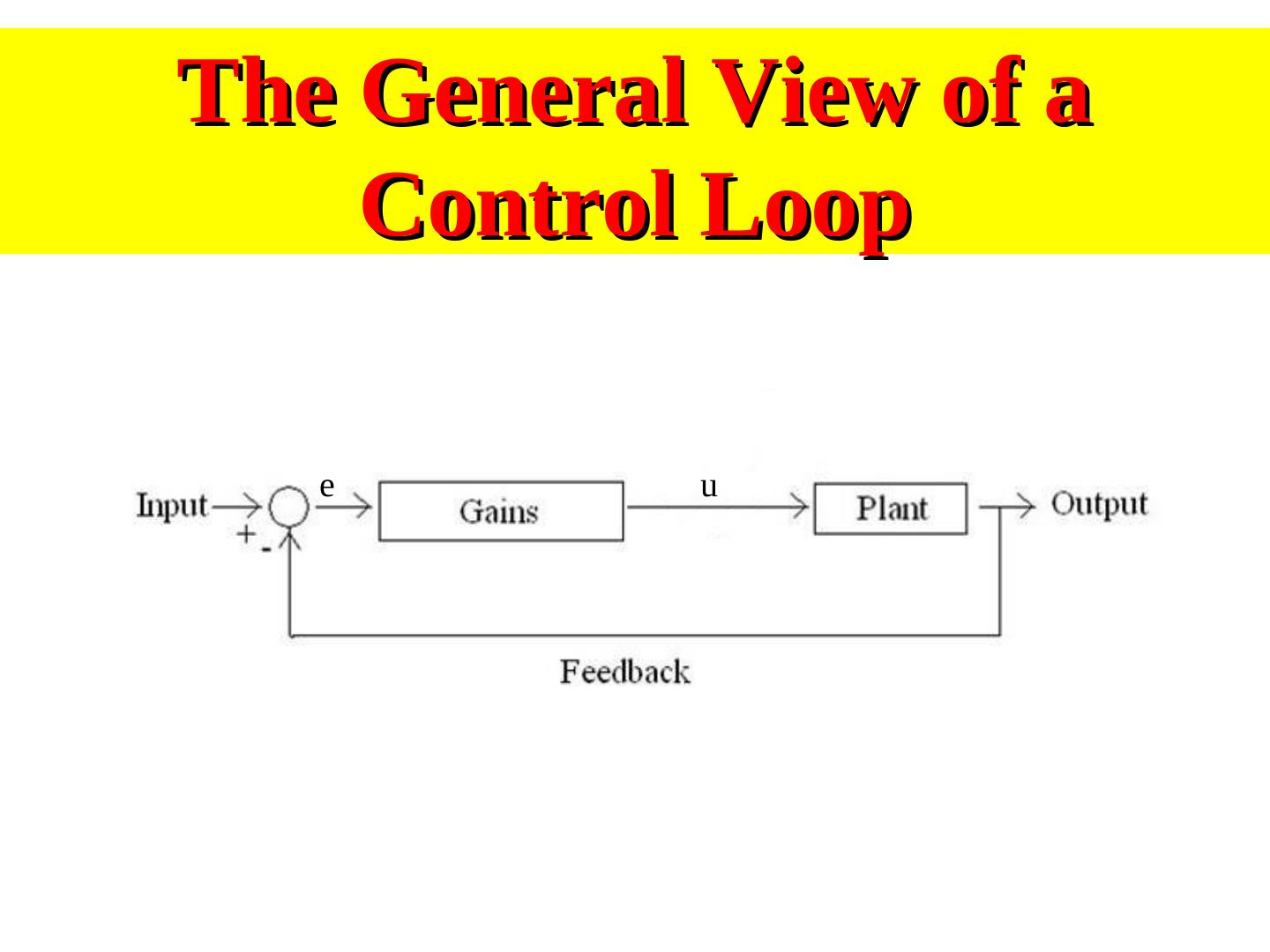
19 .The General View of a Control Loop e u
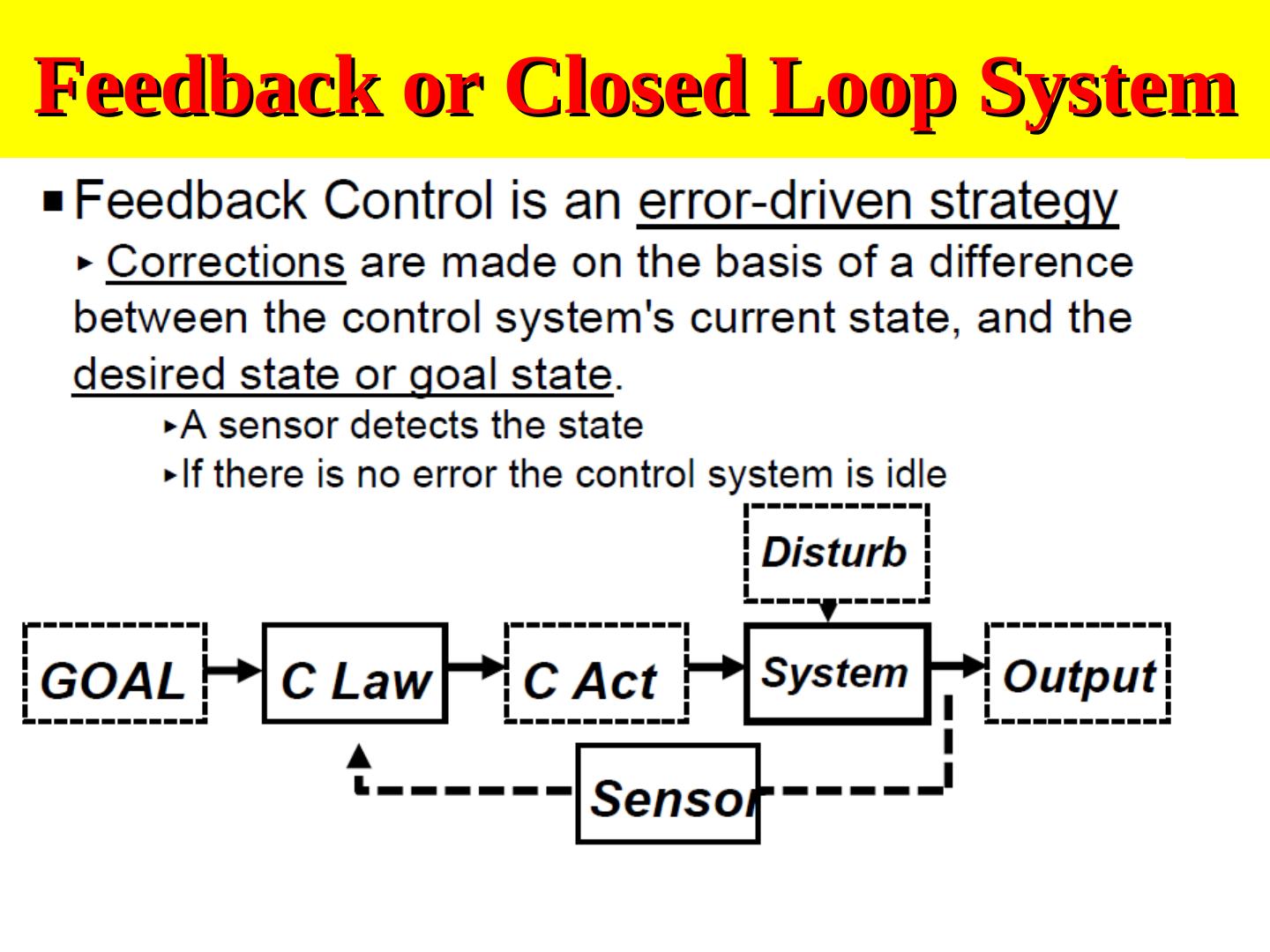
20 .Feedback or Closed Loop System
21 . PID Control • Proportional Integral Derivative Control • The Basic Problem: – We have n joints, each with a desired position which we have specified – Each joint has an actuator which is given a command in units of torque – Most common method for determining required torques is by feedback from joint sensors
22 . What is PID Control? • Proportional, Integral, & Derivative Control – Proportional: Multiply current error by constant to try to resolve error – Integral: Multiply sum of previous errors by constant to resolve steady state error (error after system has come to rest) – Derivative: Multiply time derivative of error change by constant to resolve error as quickly as possible
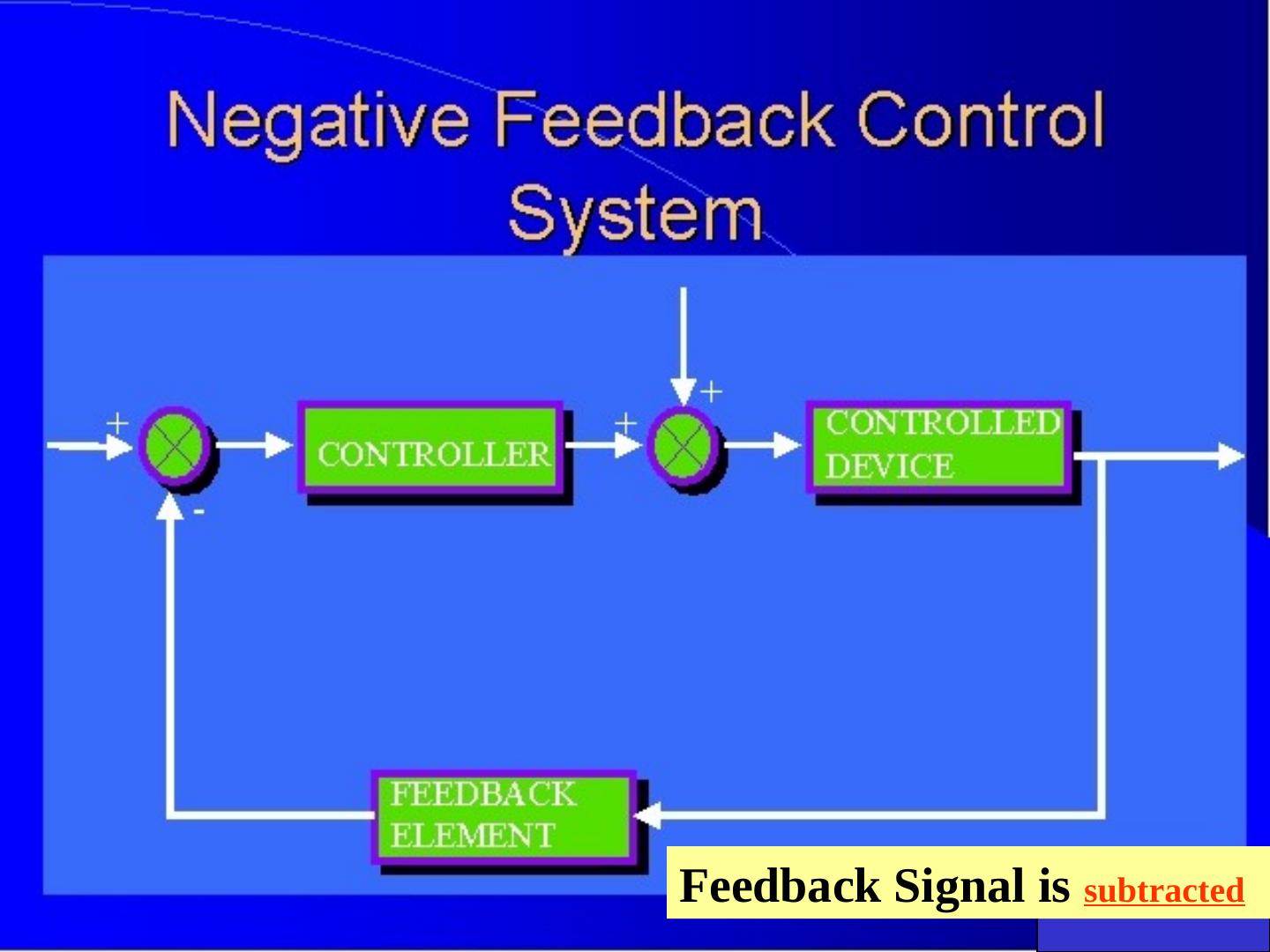
23 .Feedback Signal is subtracted
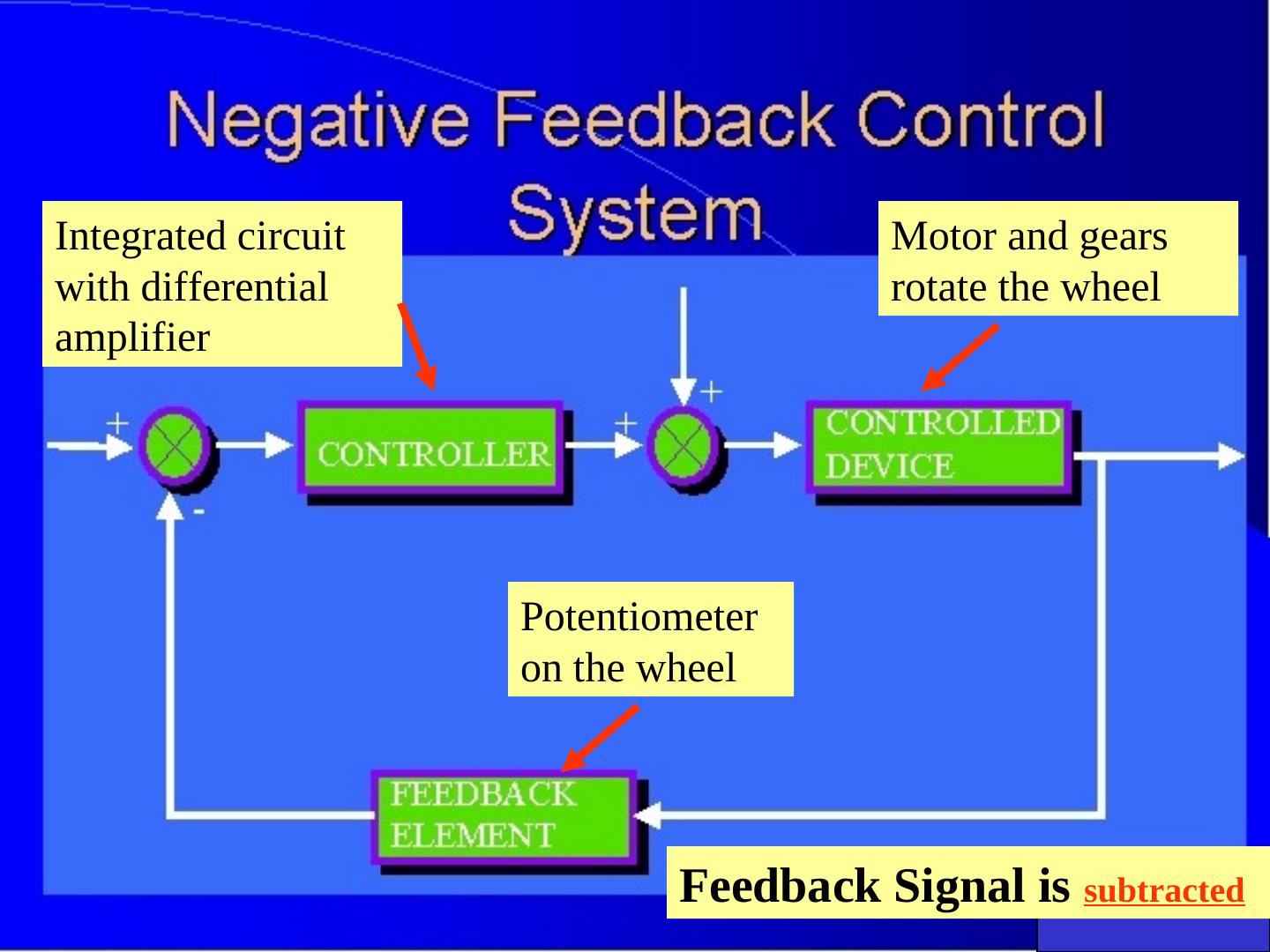
24 .Integrated circuit Motor and gears with differential rotate the wheel amplifier Potentiometer on the wheel Feedback Signal is subtracted
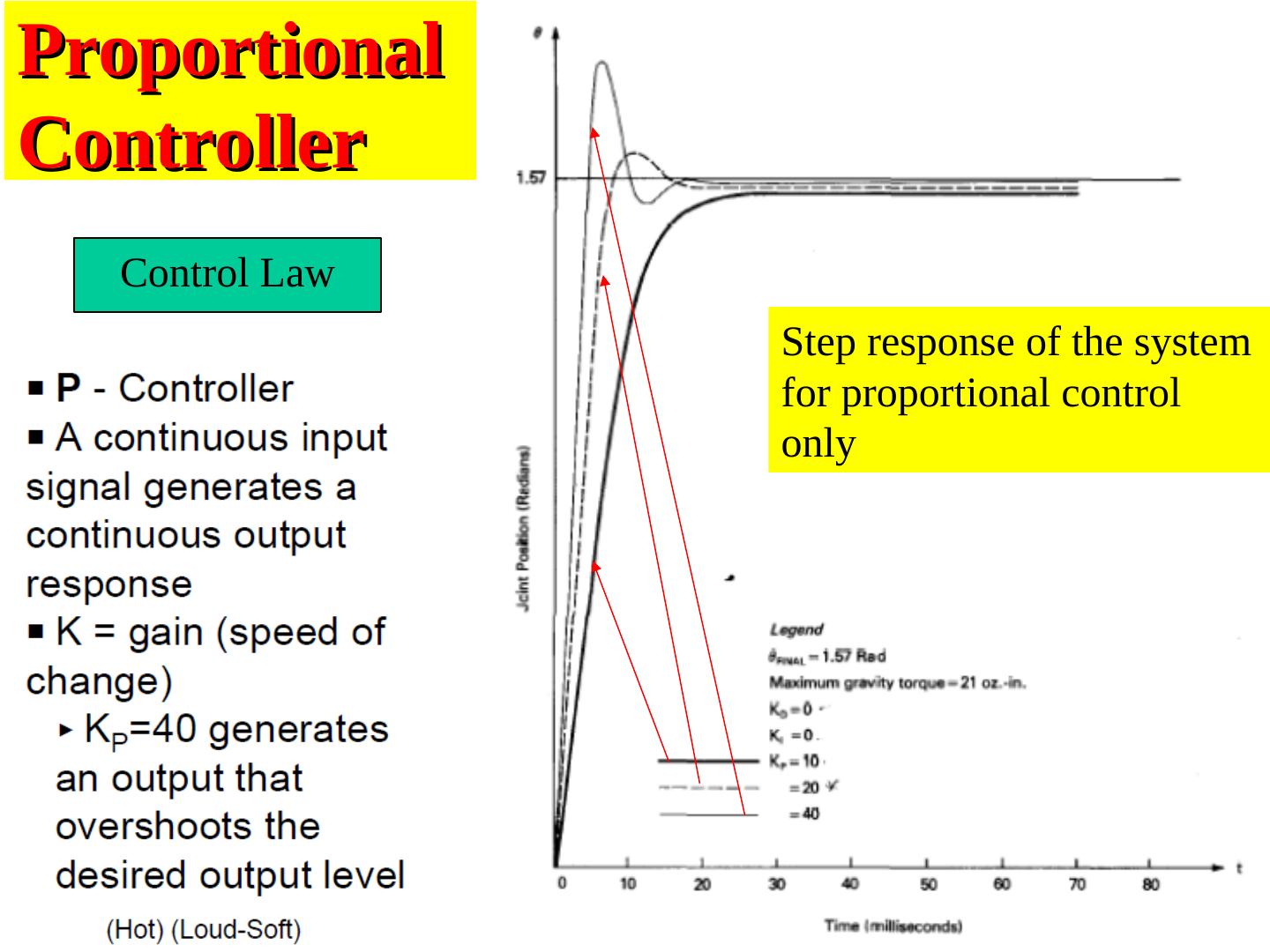
25 .Proportional Controller Control Law Step response of the system for proportional control only
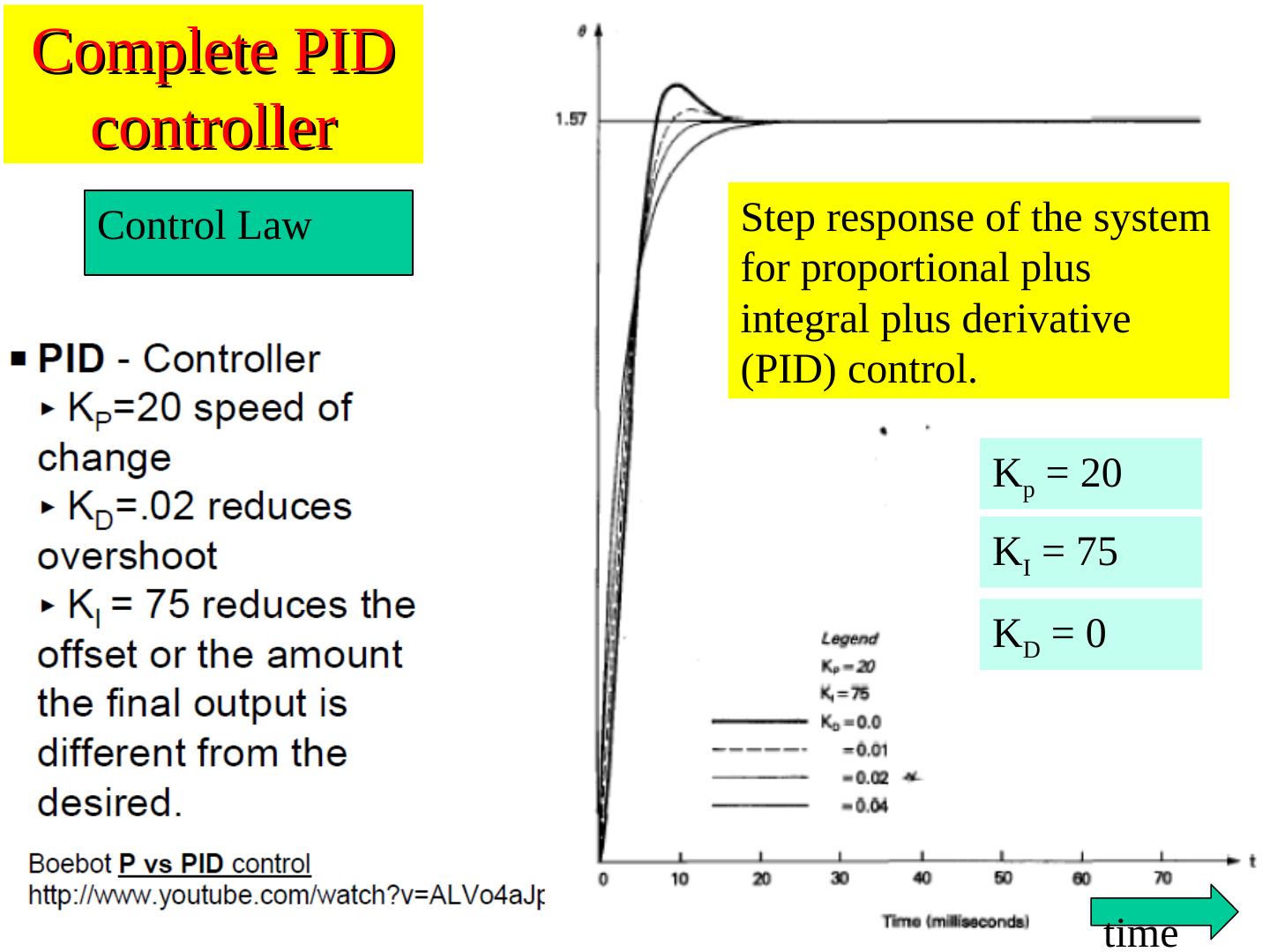
26 .Complete PID controller Control Law Step response of the system for proportional plus integral plus derivative (PID) control. Kp = 20 KI = 75 KD = 0 time
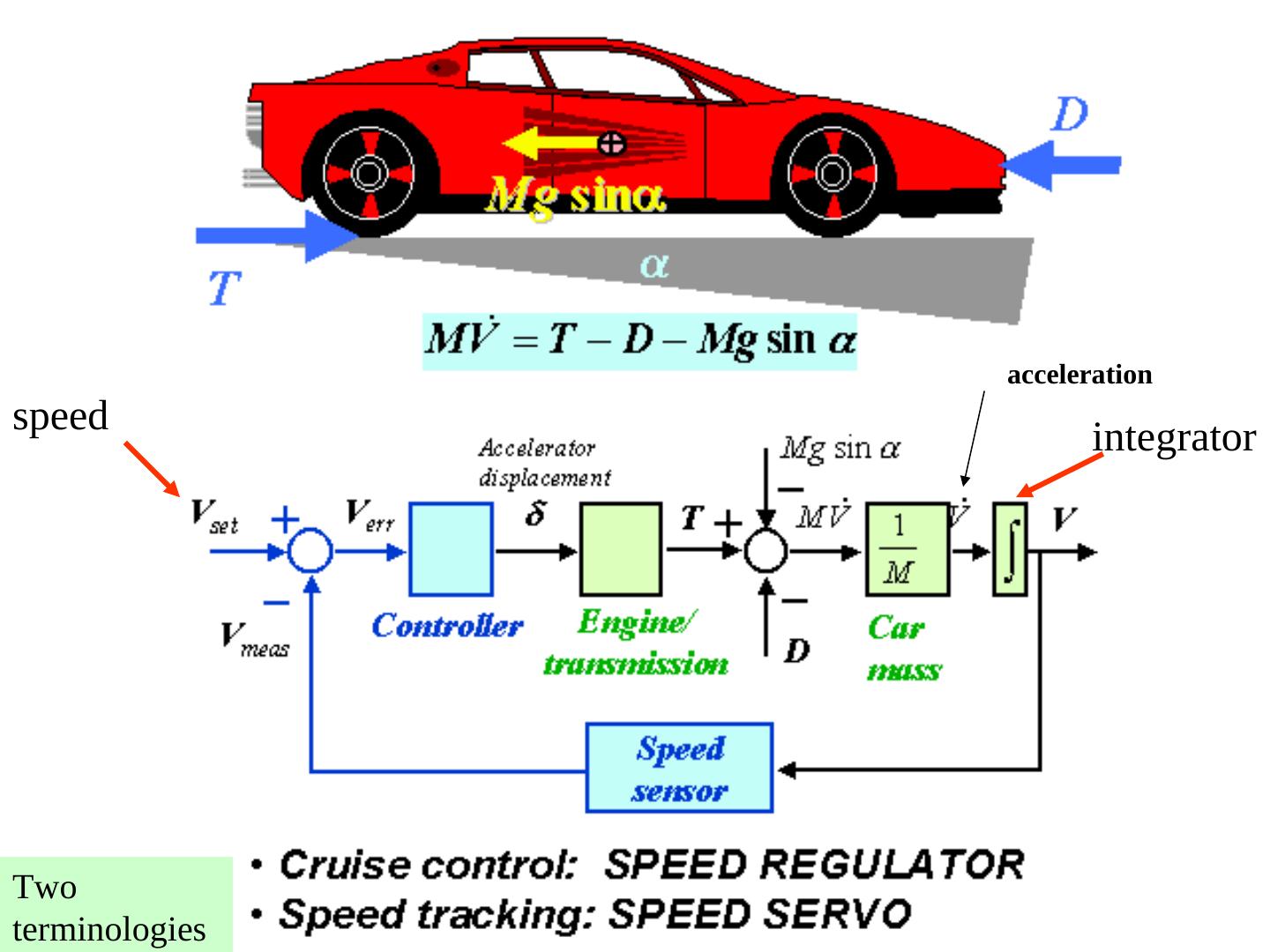
27 .Cruise Control
28 .Example V = velocity, speed
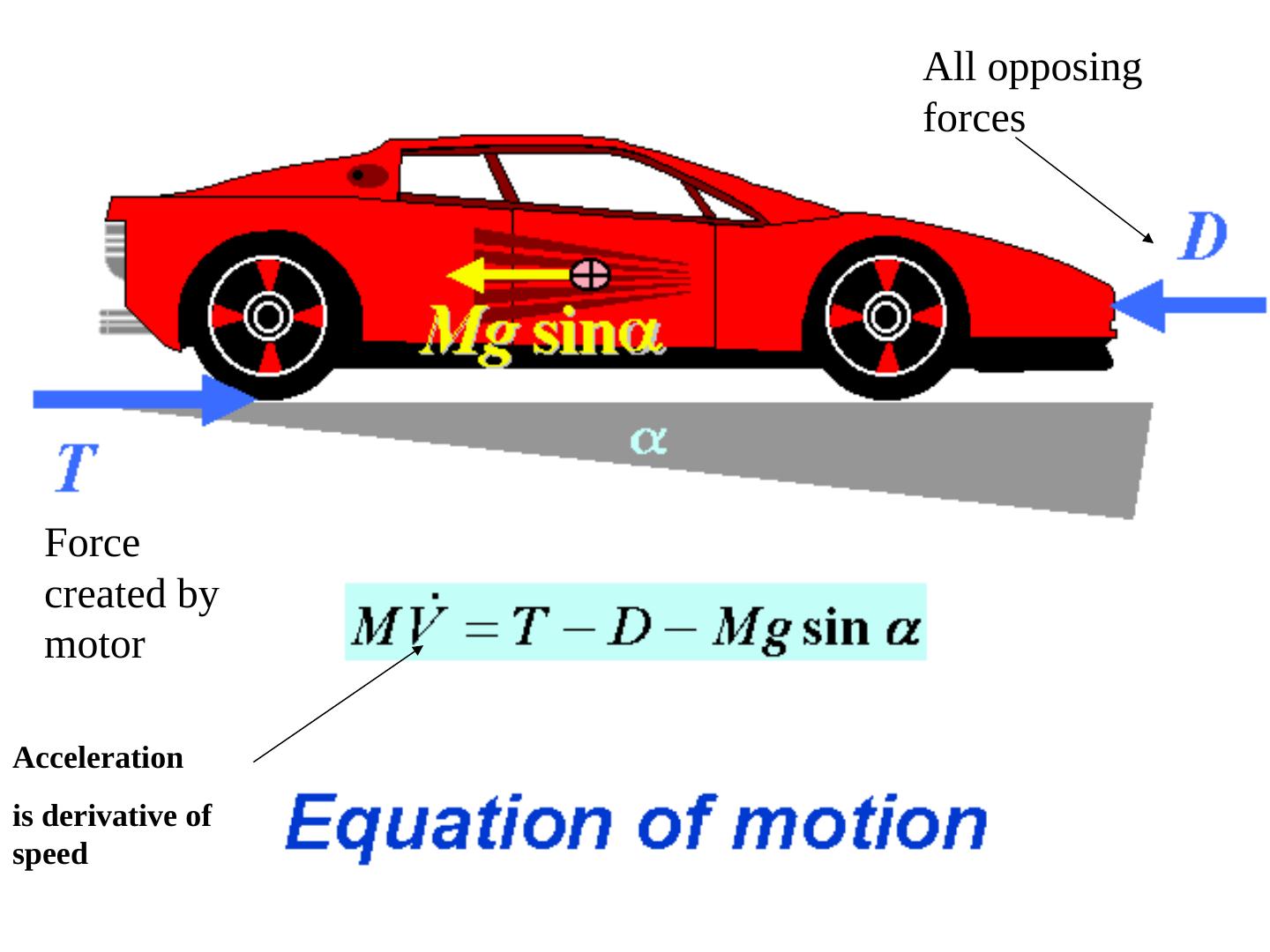
29 . All opposing forces Force created by motor Acceleration is derivative of speed
相关推荐

加关注
3秒后跳转登录页面
去登陆

