展开查看详情
1 .Servo Systems
Servo is mechanism based on
feedback control.
The controlled quantity is
mechanical.
Jussi Suomela HUT/Automation 1
�
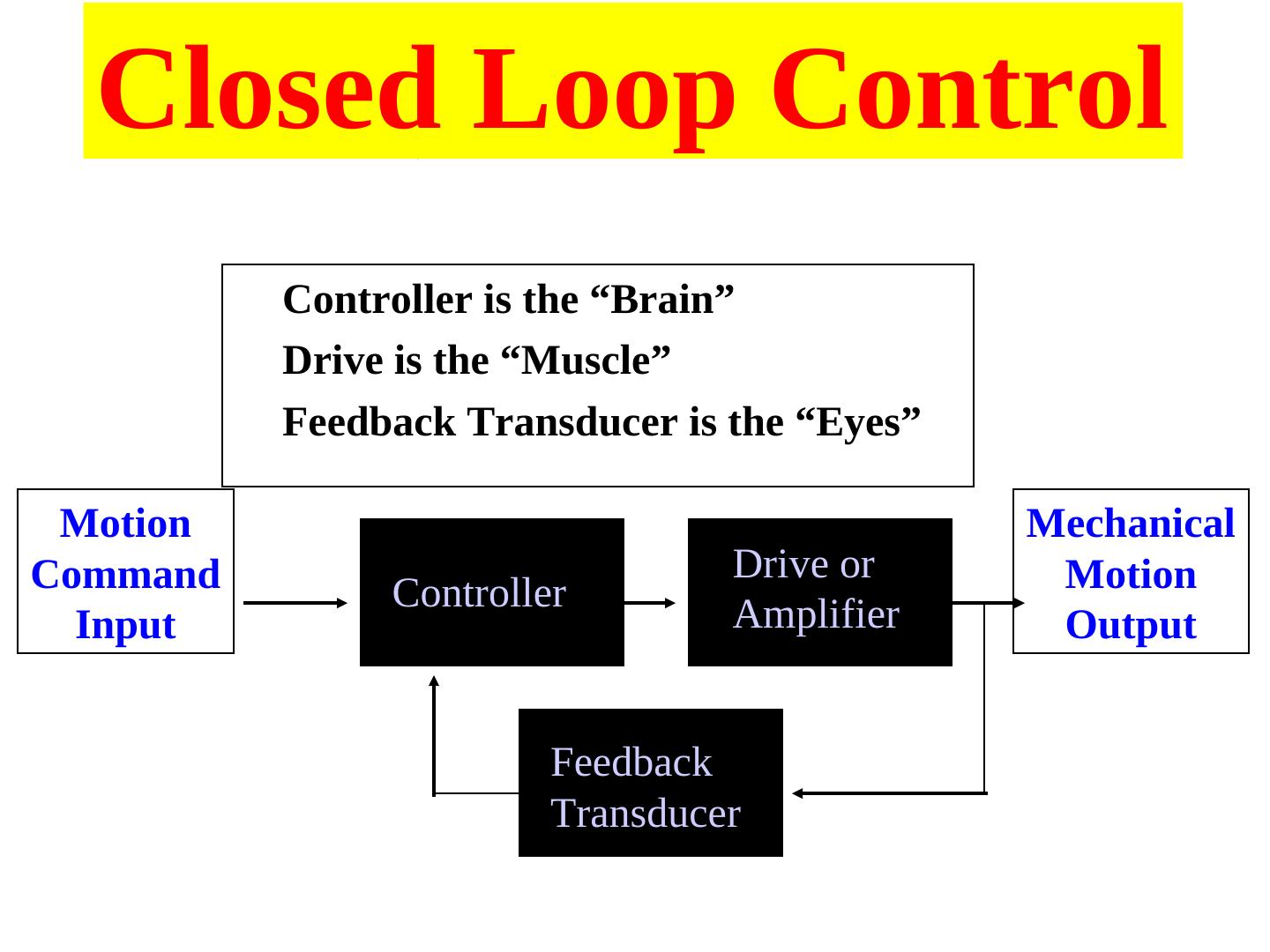
2 . Closed Loop Control
Your Partner In Productivity
• Controller is the “Brain”
• Drive is the “Muscle”
• Feedback Transducer is the “Eyes”
Motion Mechanical
Command Drive or Motion
Controller Amplifier
Input Output
Feedback
Transducer
�
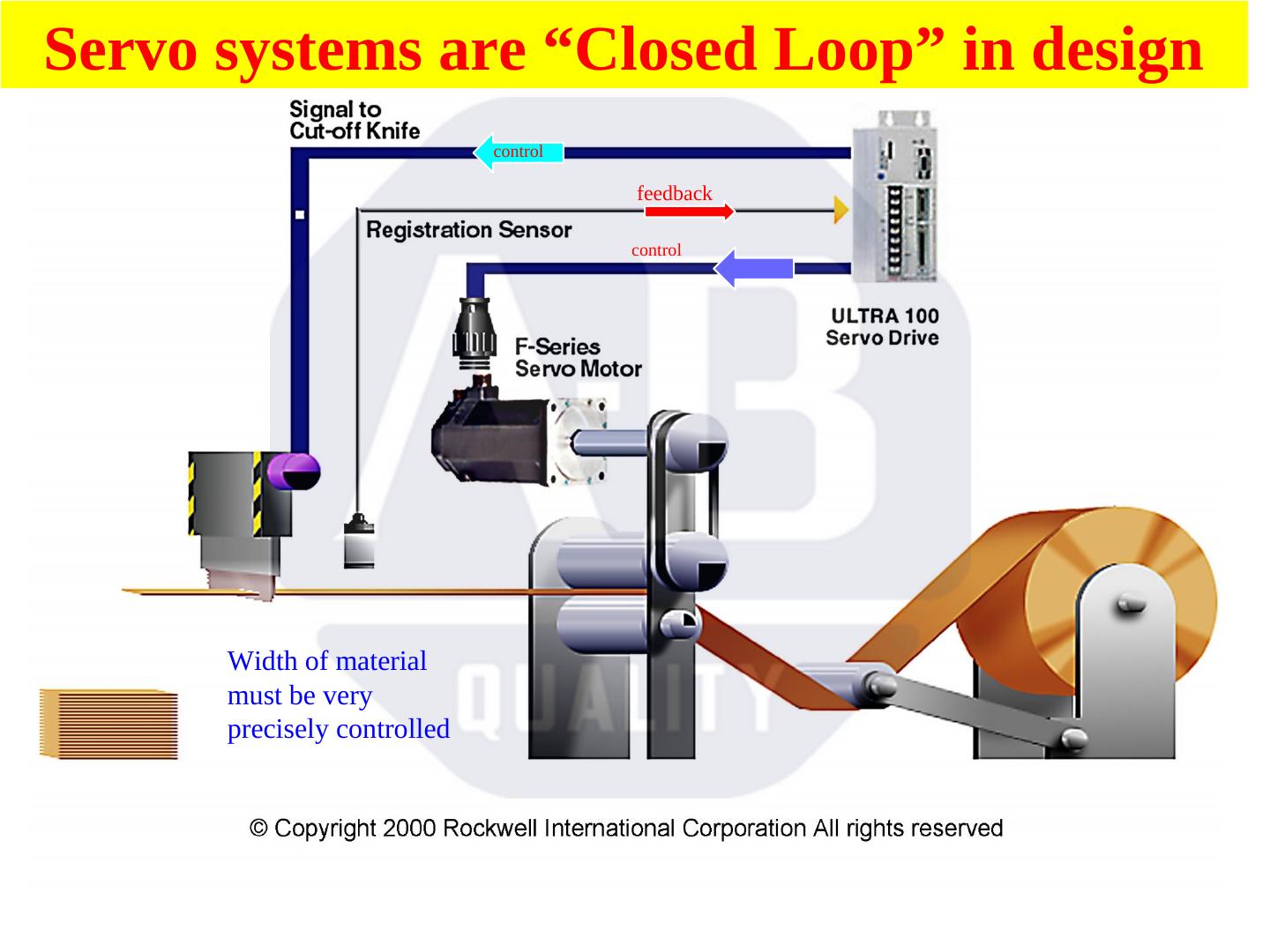
3 .Servo systems are “Closed Loop” in design
Your Partner In Productivity control
feedback
• Uses feedback for automatic correction control
• High performance
Width of material
must be very
precisely controlled
�
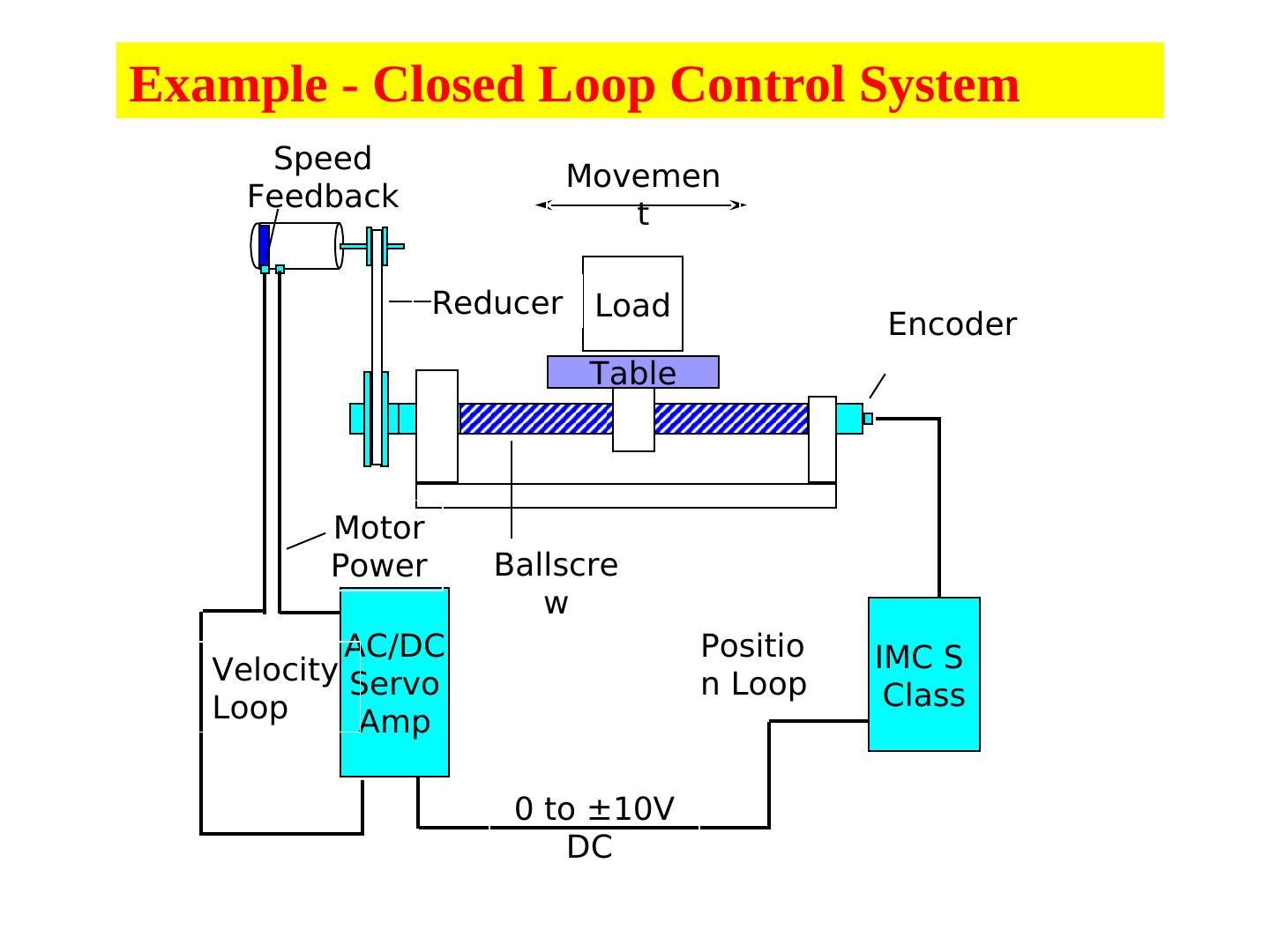
4 .Example - Closed Loop Control System
Speed
Movemen
Feedback
t
Reducer Load
Encoder
Table
Motor
Power Ballscre
w
AC/DC Positio IMC S
Velocity Servo n Loop
Loop Class
Amp
0 to ±10V
DC
�
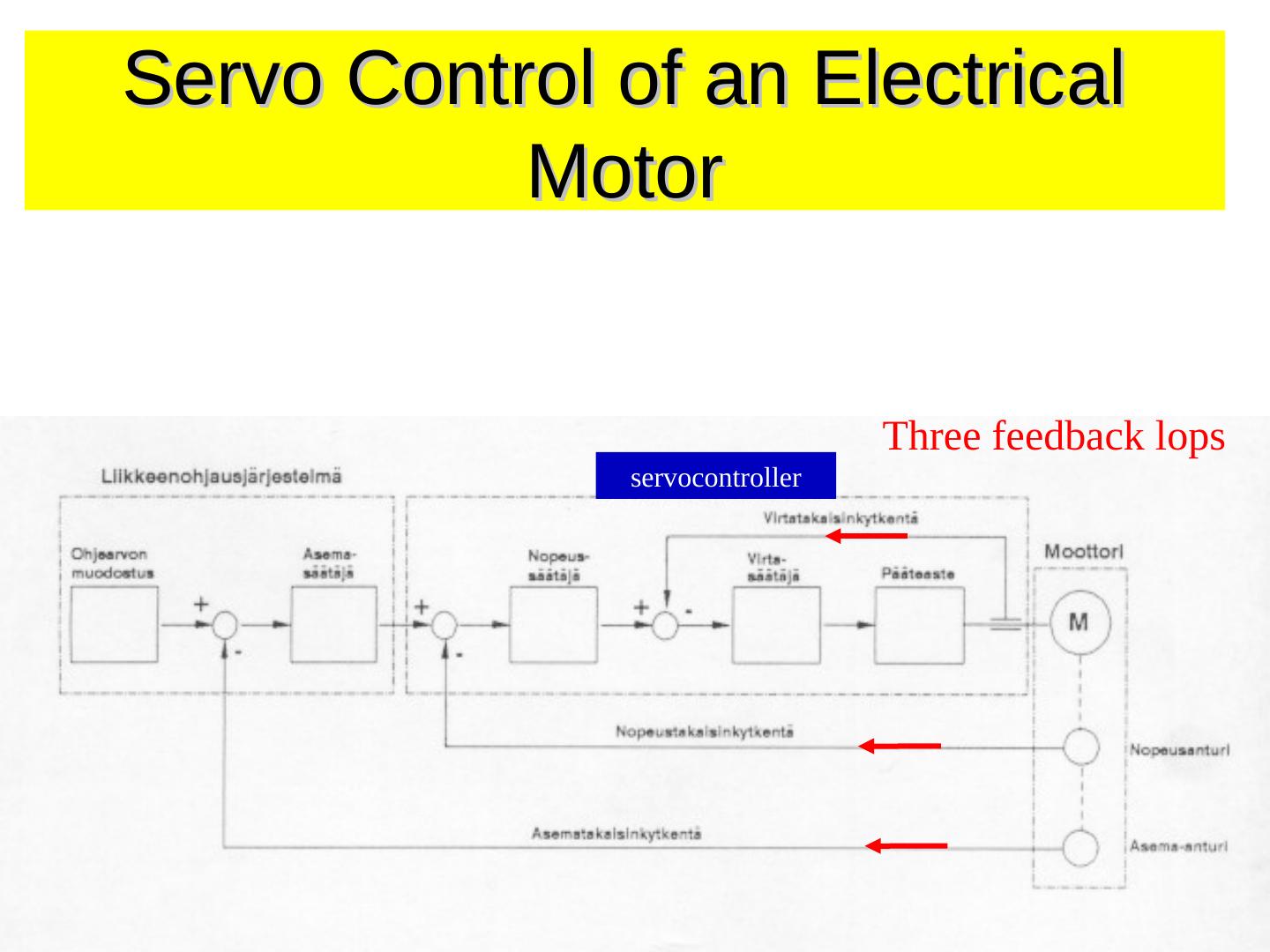
5 . Servo Control of an Electrical
Motor
Three feedback lops
servocontroller
Jussi Suomela HUT/Automation 5
�
6 . Properties of Servo Systems
high maximum torque/force allows high (de)acceleration
high zero speed torque/force
high bandwidth provides accurate and fast control
robustness
Servo Systems are
not servos
Jussi Suomela HUT/Automation 6
�
7 .How to design good Servo Systems?
Terminology:
Do not confuse “servos” with “servo motors”
DC motors (brushed or brushless) are also sometimes also referred to as
“servo motors”
See: http://www.theproductfinder.com/motors/bruser.htm
“So when does a motor become a servo motor?motor
There are certain design criteria that are desired when building a
servo motor, which enable the motor to more adequately handle
the demands placed on a closed loop system.
First of all, servo systems need to rapidly respond to changes in
speed and position, which require high acceleration and
deceleration rates.
This calls for extremely high intermittent torque.
�
8 . Intermittent Torque in Servos
Torque is related to current in the brushed servo motor.
So the designers need to keep in mind the ability of the
motor to handle short bursts of very high current, which can
be many times greater than the continuous current
requirements.
Another key characteristic of the brushed servo motor is a
high ratio of torque to inertia.
This ratio is an important factor in determining motor
responsiveness.
Further, servo motors need to respond to small changes in
the control signal.
So the design requires reaction to small voltage variations.
�
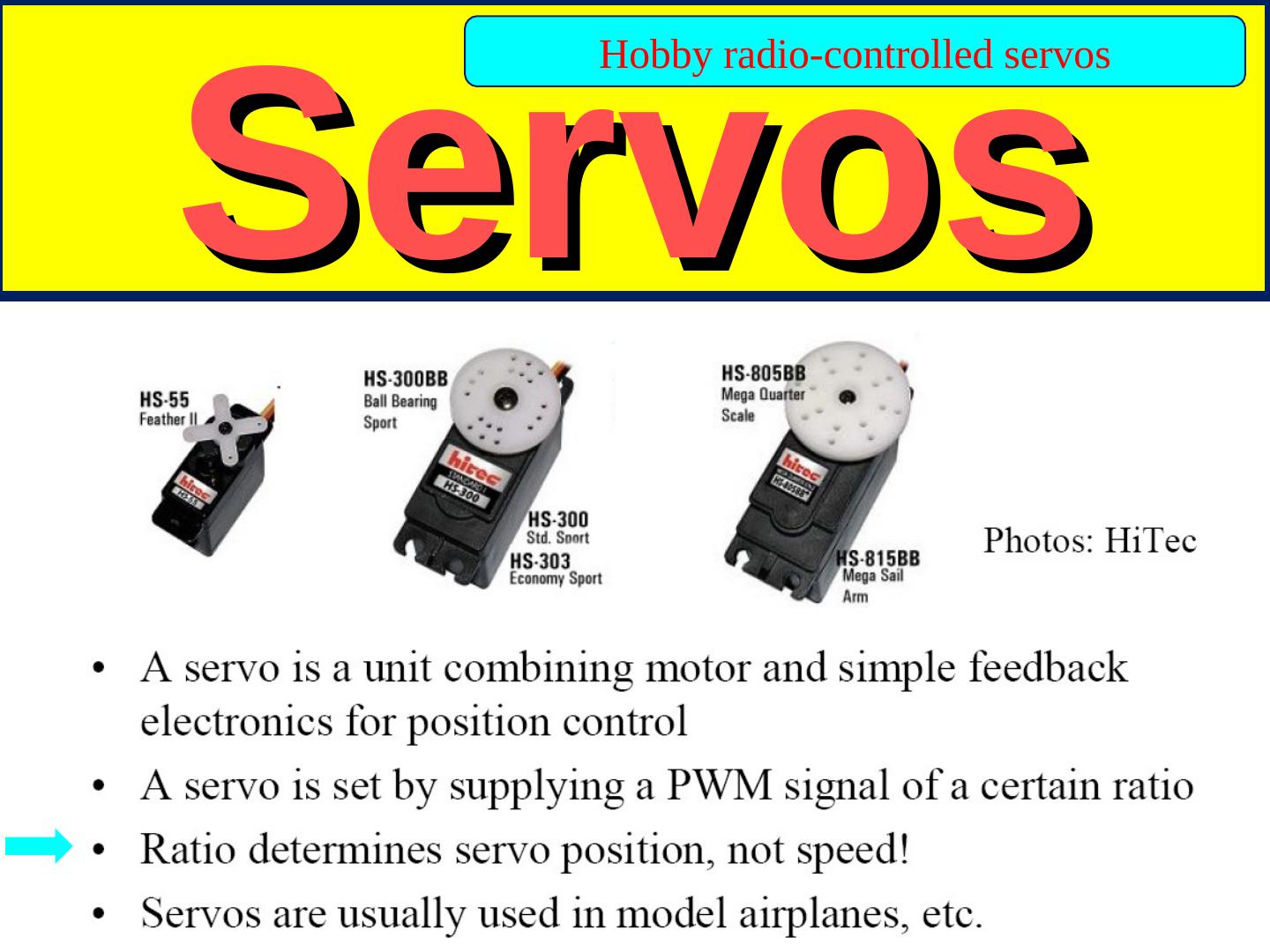
9 .Servos
Hobby radio-controlled servos
�
10 .Small Servos (servo-motors) for small
robots
Positioning applications:
�
11 .Three-wire interface of standard
servos
�
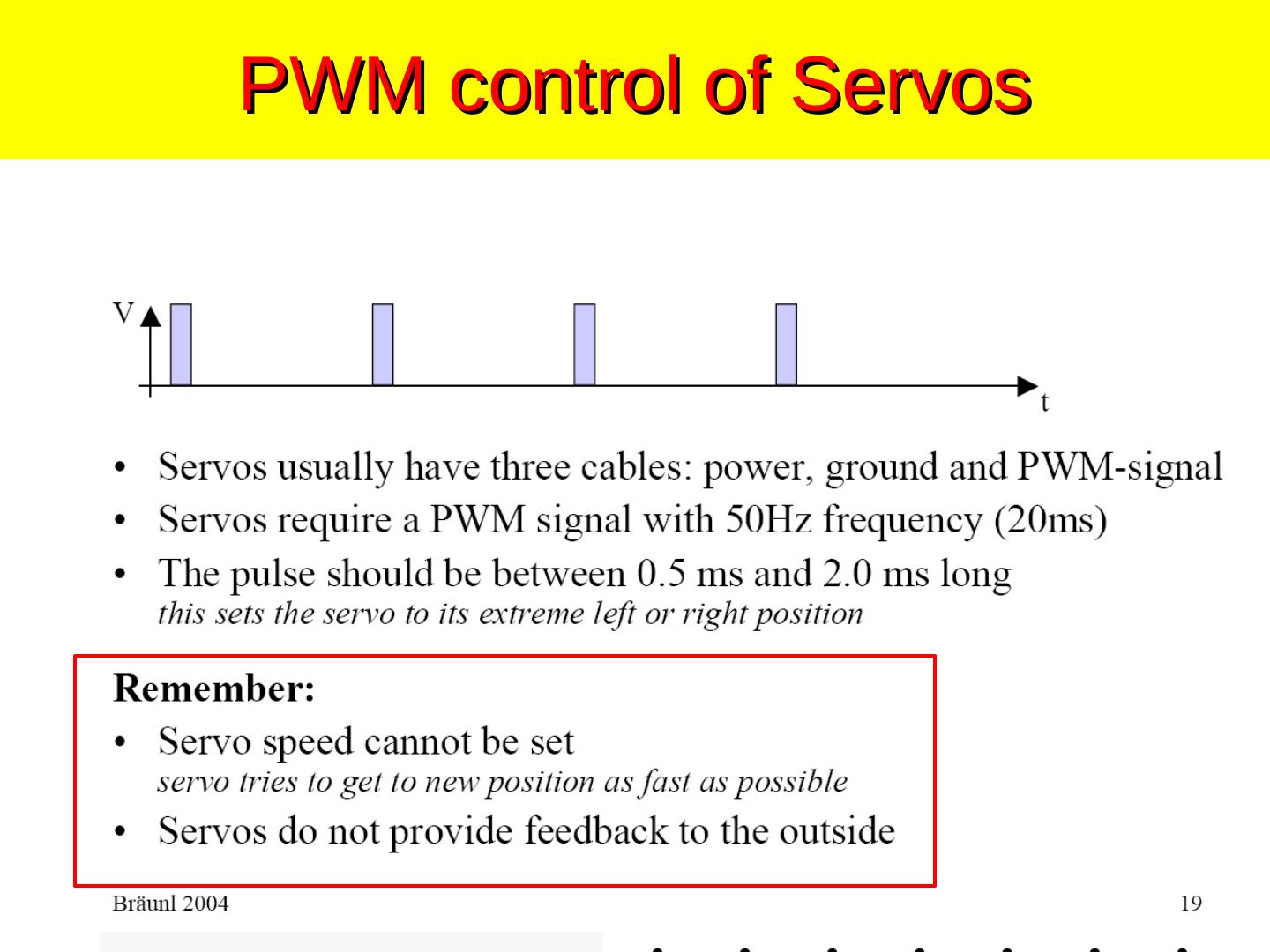
12 .PWM control of Servos
�
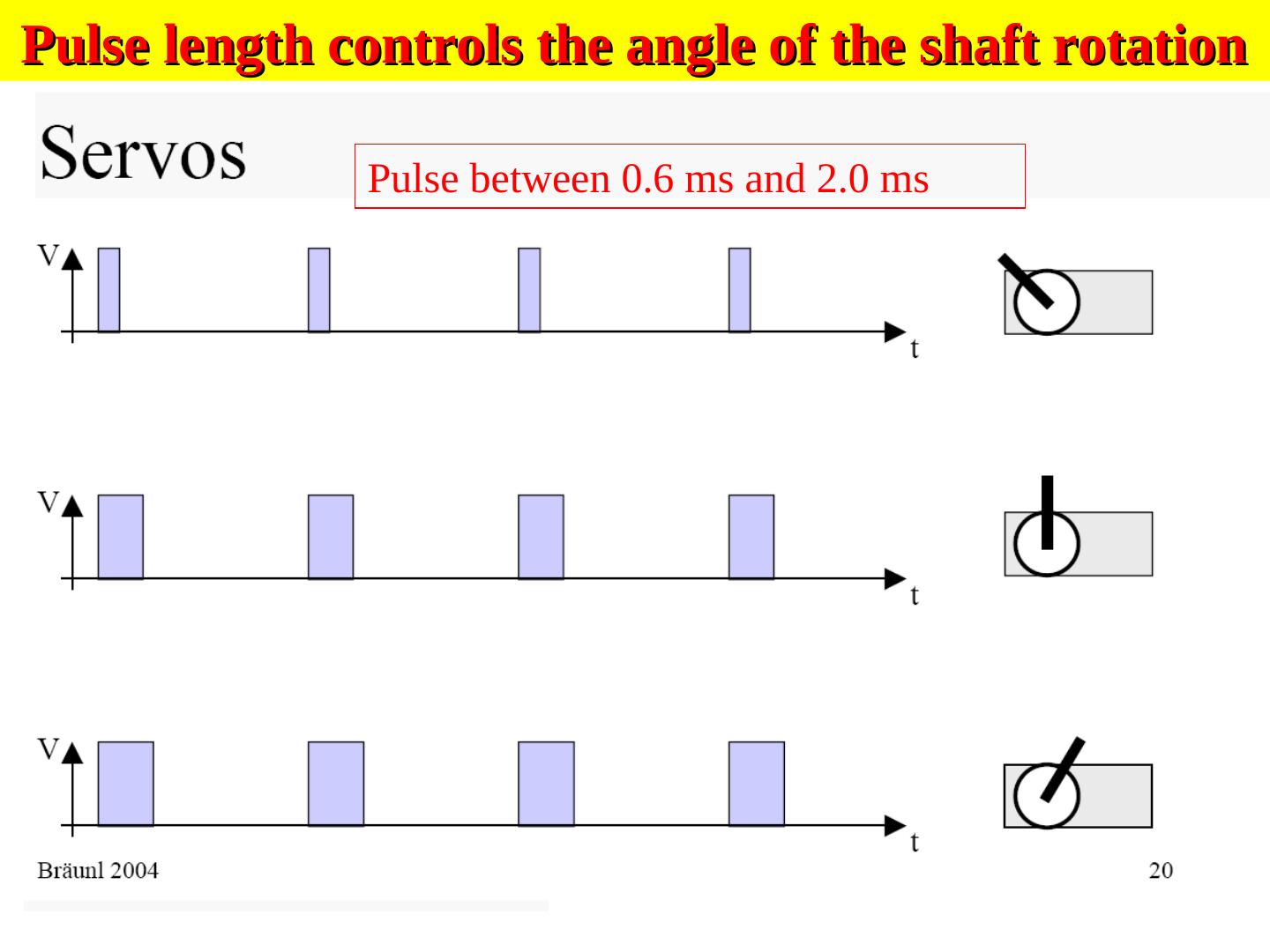
13 .Pulse length controls the angle of the shaft rotation
Pulse between 0.6 ms and 2.0 ms
�
14 .Speed Control PWM is not the
same as the Servo PWM
Single pulse width
counterclockwise
center
clockwise
�
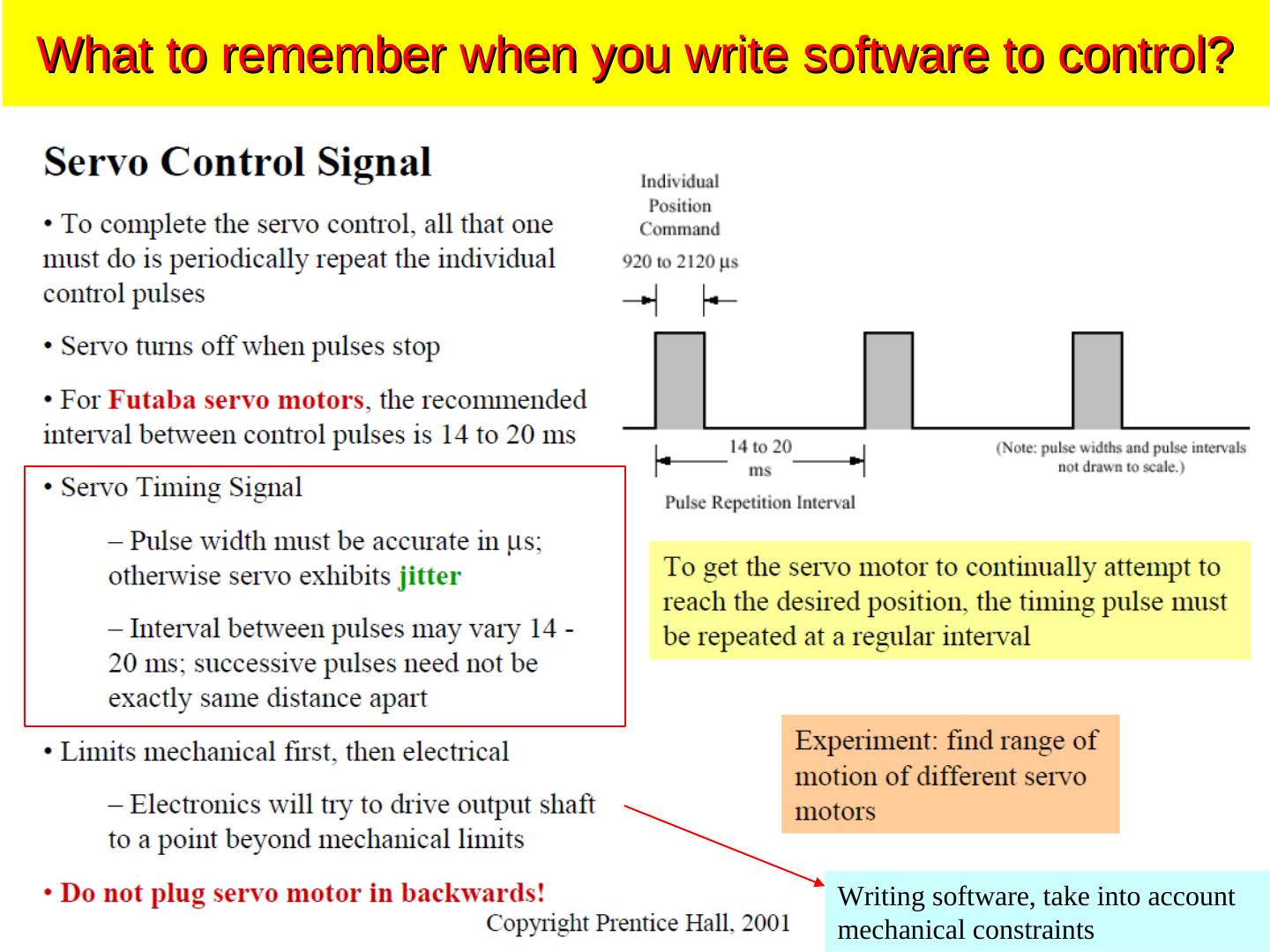
15 .What to remember when you write software to control?
Writing software, take into account
mechanical constraints
�
16 . “Winch servo” and how to
convert from standard servo
�
17 .Pneumatic & Hydraulic Actuators
1. Large manipulators in industry frequently employ hydraulic drives,
• since such drives provide a higher torque-to-weight ratio than electric motors
2. However, because of the maintenance problems associated with
pressurized oil (including leaks), hydraulic motors are not used in
smaller mobile robots
3. Pneumatic drives have been used as actuators in the past but are not
currently popular
4. Air is compressible, resulting in nonlinear behavior of the actuator
�
18 .Sources
• Braunl
• Jussi Suomela
Jussi Suomela HUT/Automation 18
�