






- 快召唤伙伴们来围观吧
- 微博 QQ QQ空间 贴吧
- 文档嵌入链接
- 复制
- 微信扫一扫分享
- 已成功复制到剪贴板
32_MOTOR PARAMETERS
Informally Parameters and properties of DC Motors
展开查看详情
1 . Informally Parameters and properties of DC Motors
2 . Operating Voltage • Operating Voltage is the voltage recommended for powering the motor • A motor requires a power source within its operating voltage, • i.e., the recommended voltage range for best efficiency of the motor. • The motor will work fine on lower voltages (not always). But it will work at a lower power. • The motor can operate at higher voltages. • The power is increased!! • This will however shorten the operating life of the motor.
3 . Current and Work • When constant voltage is applied, a DC motor draws current in the amount proportional to the work it is doing. • E.g., if a robot is pushing against a wall, it is drawing more current (and draining more of its batteries) than when it is moving freely in open space. • The reason is the resistance to the motor motion introduced by the wall. • When there is no resistance to its motion, the motor draws the least amount of current; • When there is so much resistance as to cause the motor to stall, it draws the maximal amount of current. Copyright @ 2002 A. G. Billard
4 . Stall Current • If the resistance is very high (i.e., the wall won't move no matter how hard the robot pushes against it), the motor draws a maximum amount of power, and stalls. • The stall current of the motor is the most current it can draw at its specified voltage. Copyright @ 2002 A. G. Billard
5 . Motor Inefficiency • As any physical system, DC motors are not perfectly efficient. • The energy is not converted perfectly. • Some energy is wasted as heat generated by friction of mechanical parts. • Inefficiencies are minimized in well-designed (more expensive) motors, and their efficiency can be high. • How high? Copyright @ 2002 A. G. Billard
6 . Level of Efficiency of DC motors • Good DC motors can be made to be efficient in the 90th percentile. • Cheap DC motors can be as low as 50%. • Other types of effectors, such as miniature electrostatic motors, may have much lower efficiencies still. Copyright @ 2002 A. G. Billard
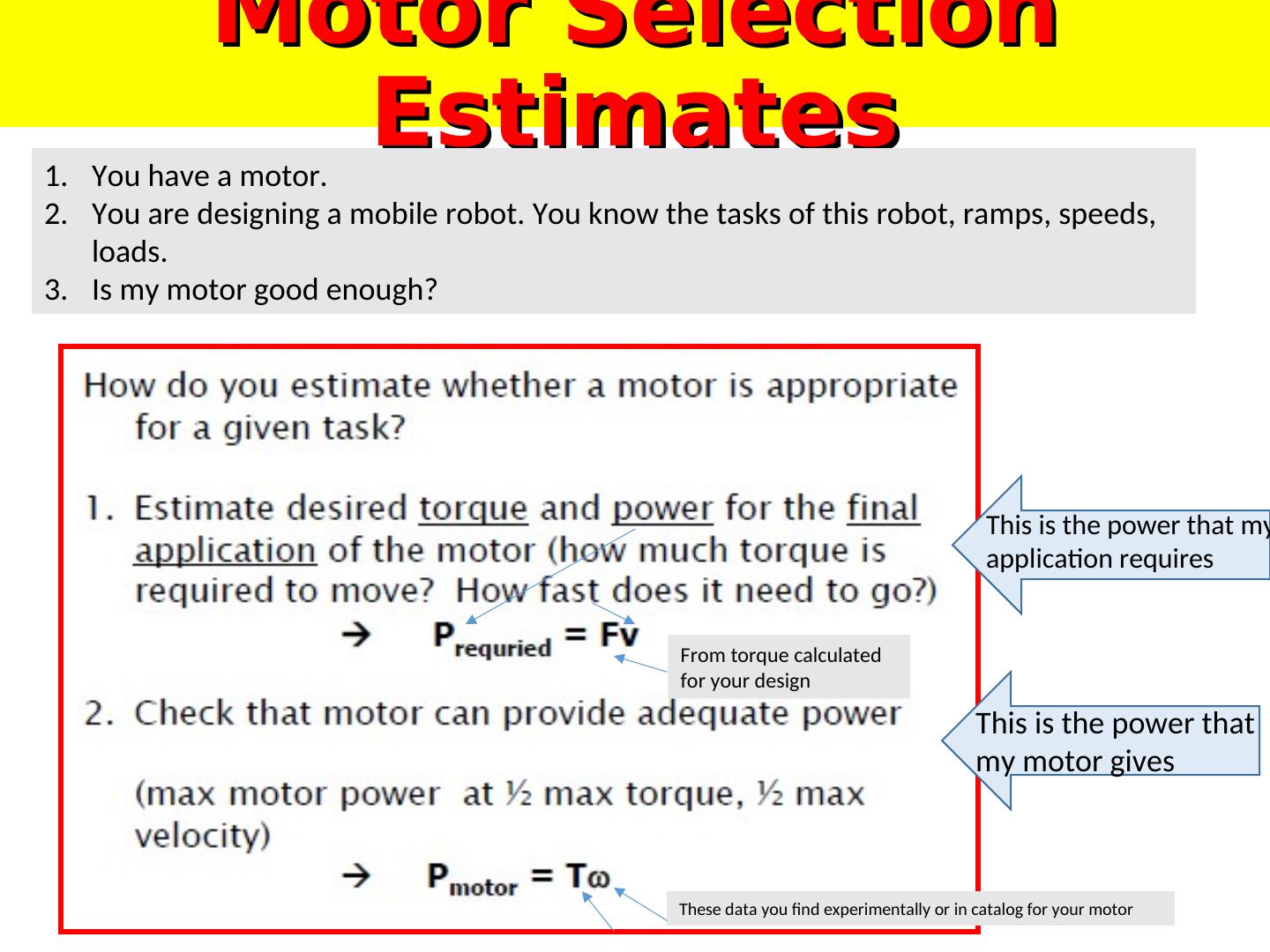
7 . Formally Characterizin g Electric Motors Characterizing motors Application of motor characteristics Choosing motors and gears
8 .Characterizing Motors Power Torque Speed
9 .Torque in DC Motors
10 . Speed, Angular Acceleration, and Torque • (omega) omega) ) • Motor speed is commonly measured in: • rpm (revolutions per minute) • or ra) d/sec (radians per second) • (omega) a) lpha) ) • Angular acceleration is commonly measured in ra) d/sec2 •T • Torque is measured in: • N-m (Newton-meters) • or ft-lbs (foot pounds) commonly
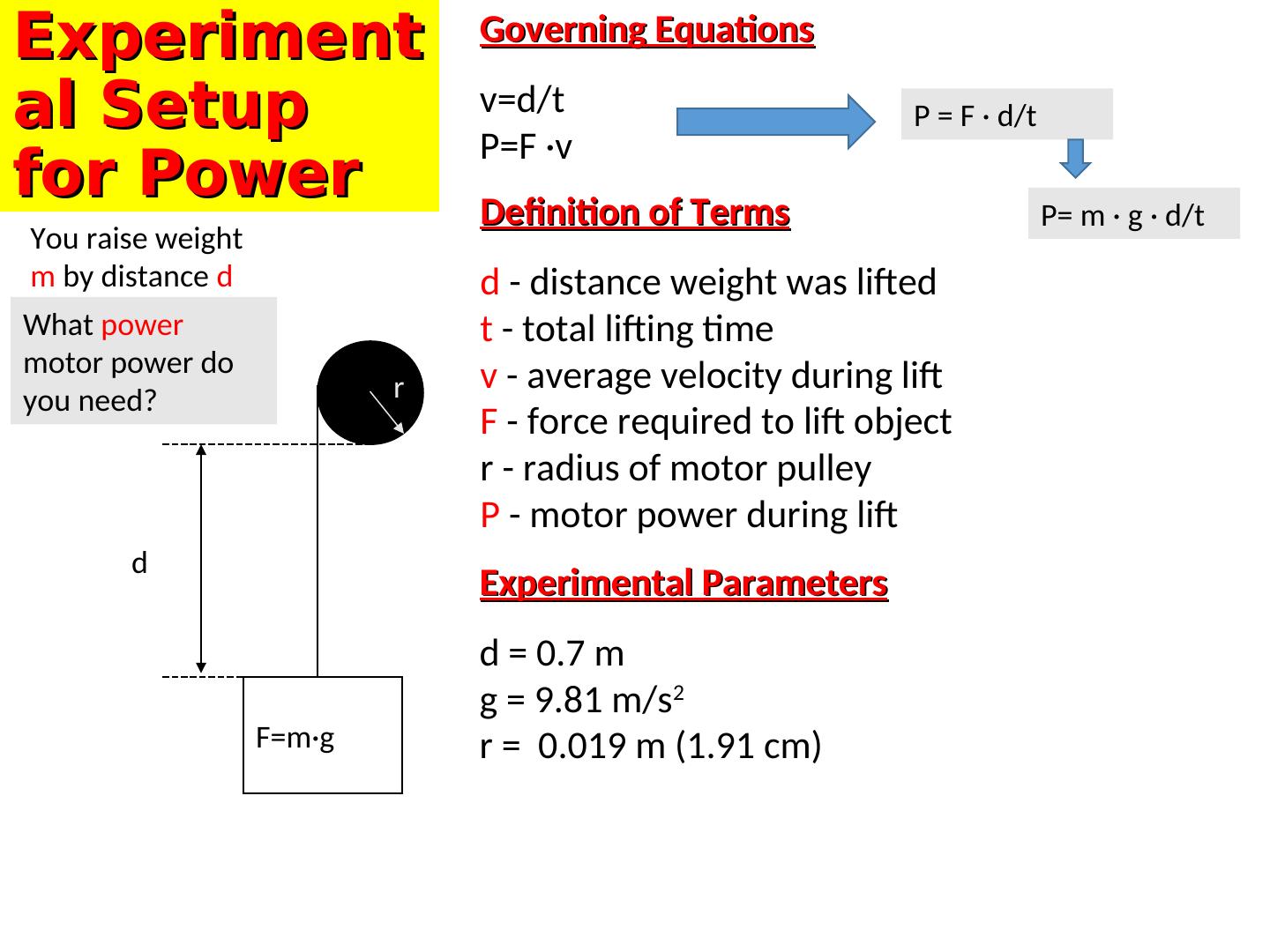
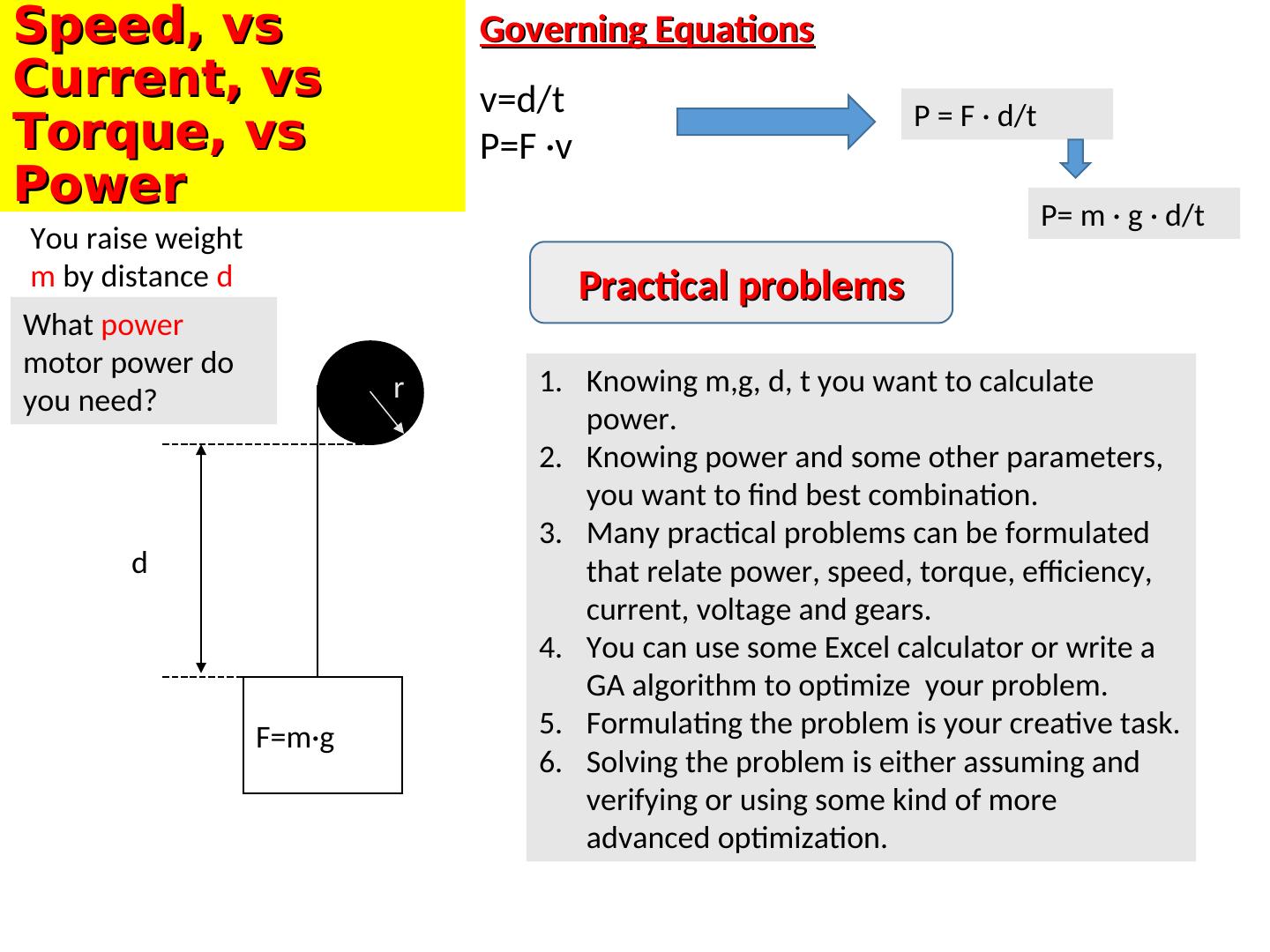
11 . What is Torque Torque? • T=F·d Where force has the units of N (Newtons) and distance has the units of m (meters) resulting in torque units of N-m Newton meters F d
12 . Torque at the Motor Shaft • Within a motor's operating current range, the more current is used, the more torque or rotational force is produced at the shaft. • The strengths of the magnetic field generated in the wire loops is directly proportional to the applied current and thus the produced torque at the shaft. Copyright @ 2002 A. G. Billard
13 . Stall Torque • Besides sta) ll current, current a motor also has its sta) ll torque. • Stall torque is the amount of rotational force produced when the motor is stalled at its operating voltage. Copyright @ 2002 A. G. Billard
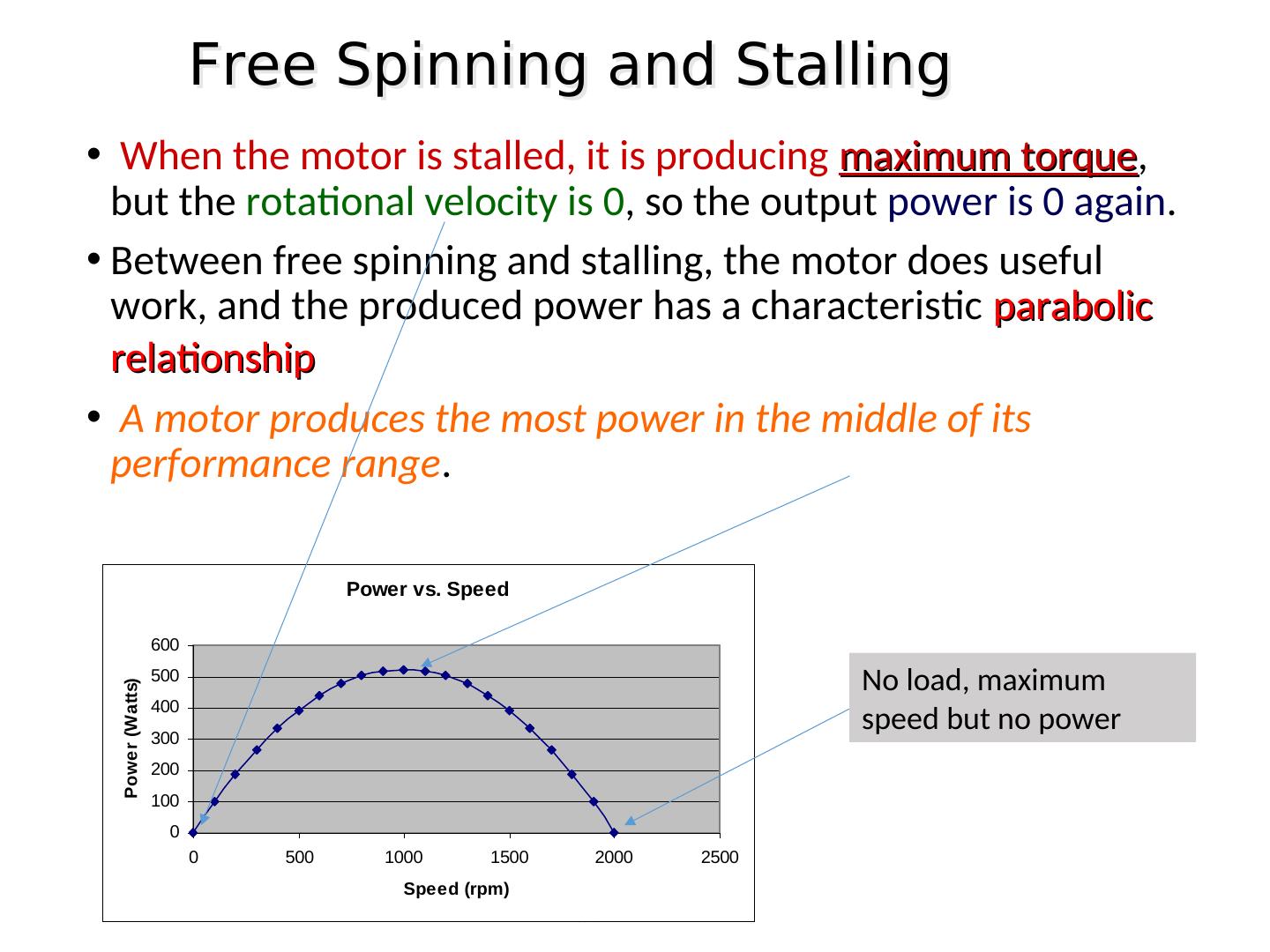
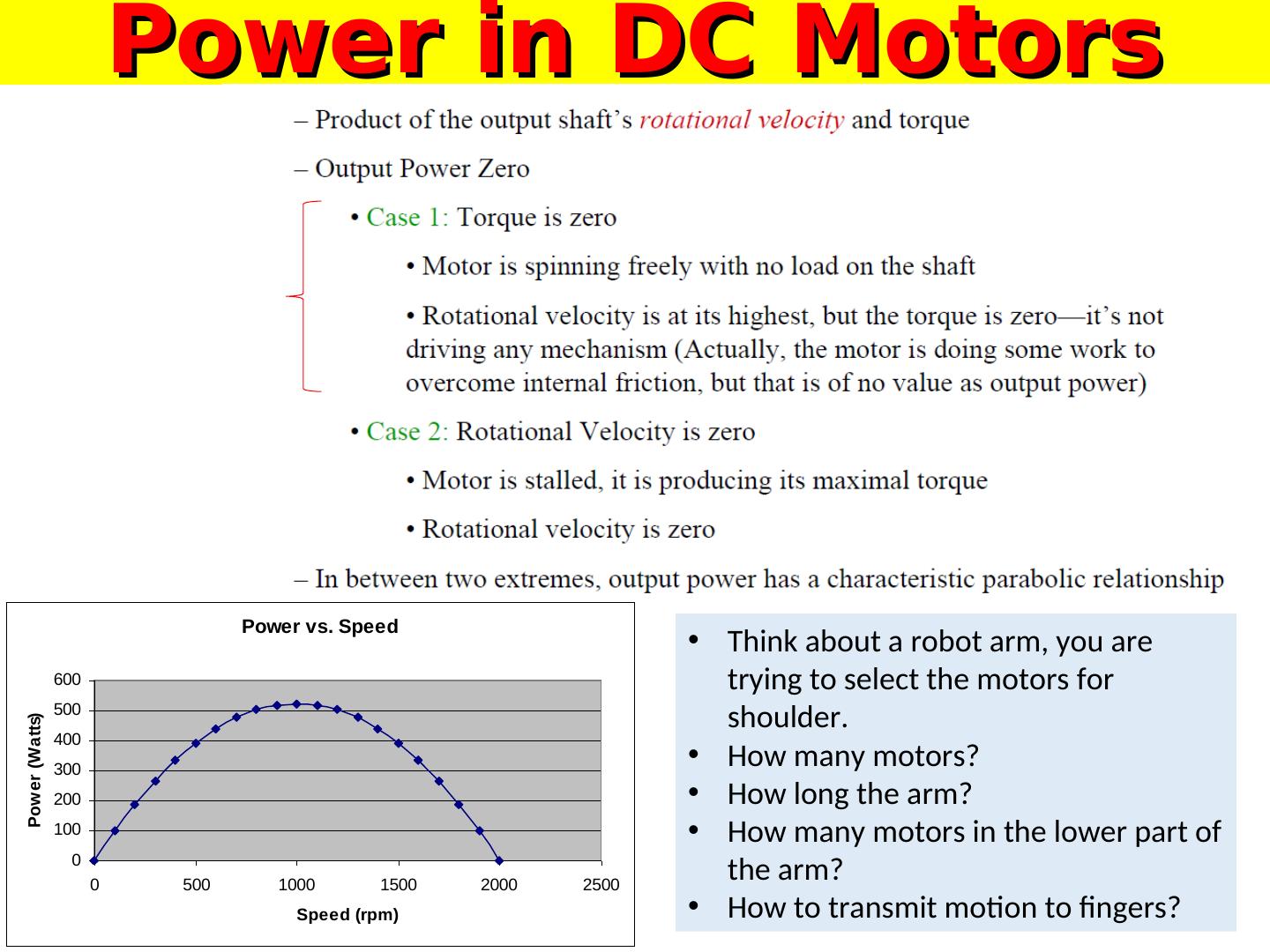
14 . Free Spinning and Stalling • When the motor is stalled, it is producing maximum torque, torque but the rotational velocity is 0, so the output power is 0 again. • Between free spinning and stalling, the motor does useful work, and the produced power has a characteristic parabolic relationship • A motor produces the most power in the middle of its performance range. Power vs. Speed 600 500 No load, maximum Power (Watts) 400 300 speed but no power 200 100 0 0 500 1000 1500 2000 2500 Speed (rpm) Copyright @ 2002 A. G. Billard
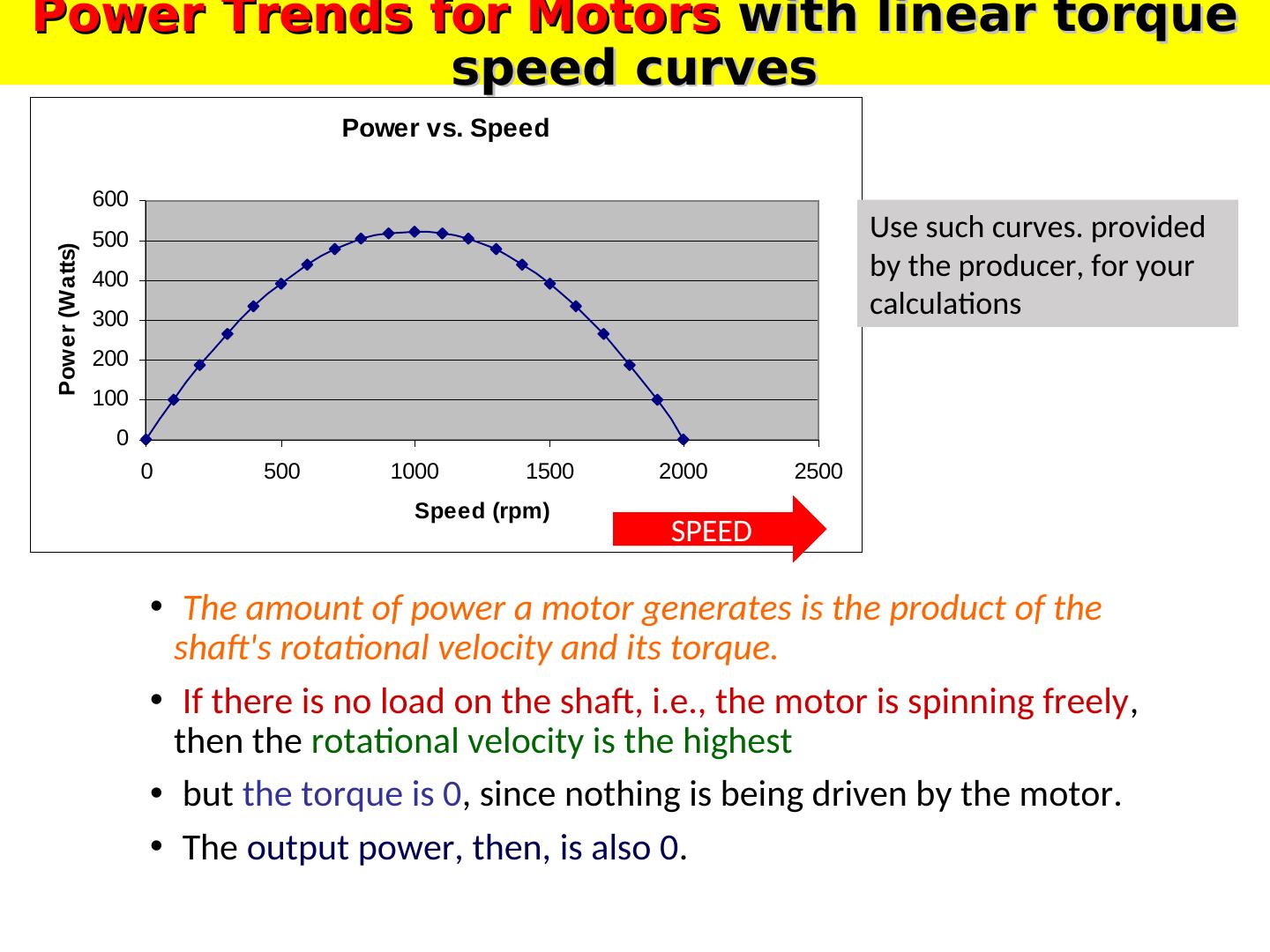
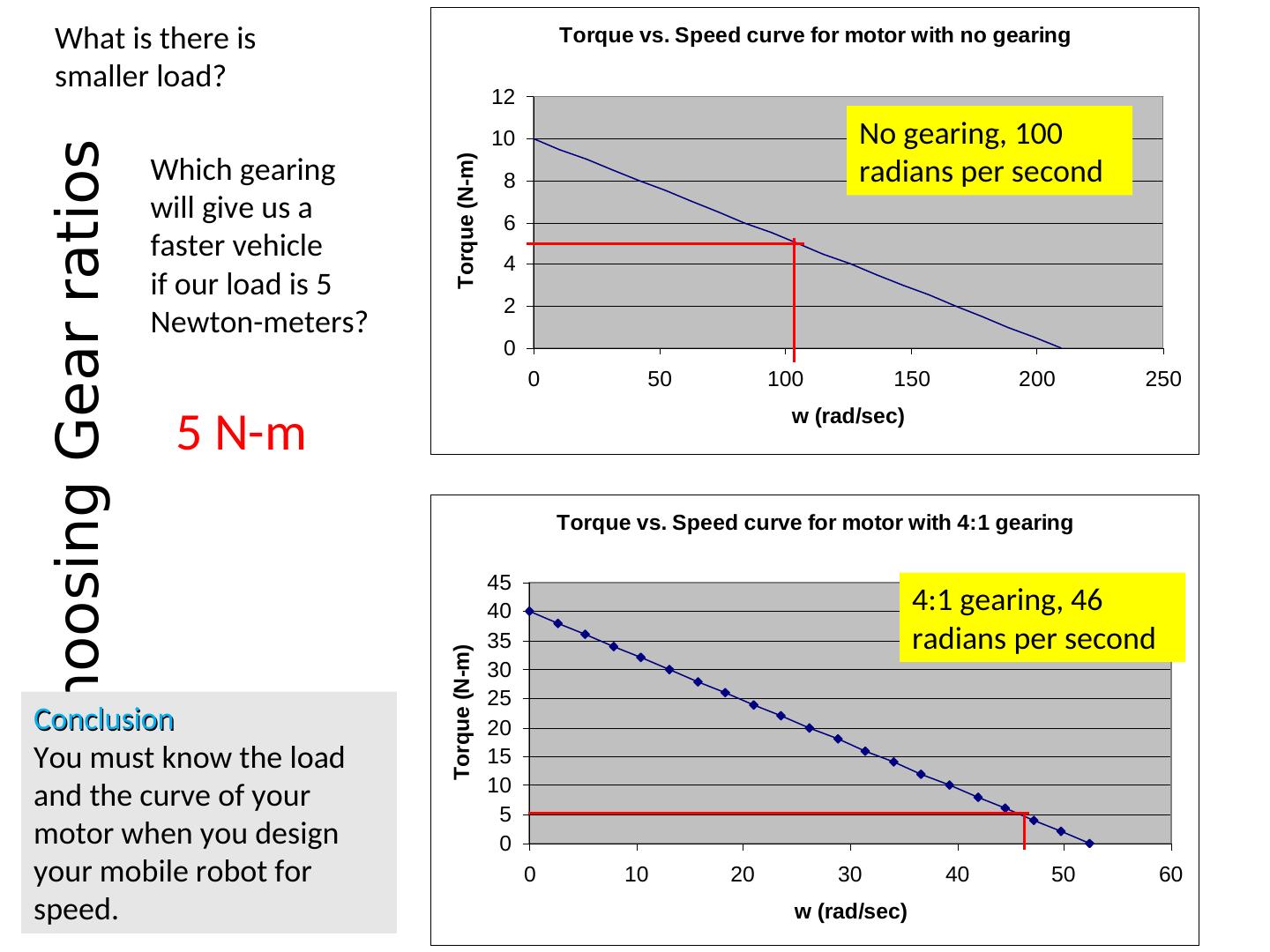
15 .Power Trends for Motors with linear torque speed curves Power vs. Speed 600 500 Use such curves. provided Power (Watts) 400 by the producer, for your 300 calculations 200 100 0 0 500 1000 1500 2000 2500 Speed (rpm) SPEED • The amount of power a motor generates is the product of the shaft's rotational velocity and its torque. • If there is no load on the shaft, i.e., the motor is spinning freely, then the rotational velocity is the highest • but the torque is 0, since nothing is being driven by the motor. • The output power, then, is also 0.
16 . Speed and Torque • Most DC motors have unloaded speeds in the range of 3,000 to 9,000 RPM (revolutions per minute), or 50 to 150 RPS (revolutions per second). • This puts DC motors in the high-speed but low-torque category (compared to some other actuators). • How often do you need to drive something very light that rotates very fast (besides a fan)? Copyright @ 2002 A. G. Billard
17 .From Motor Torque to wheel speed
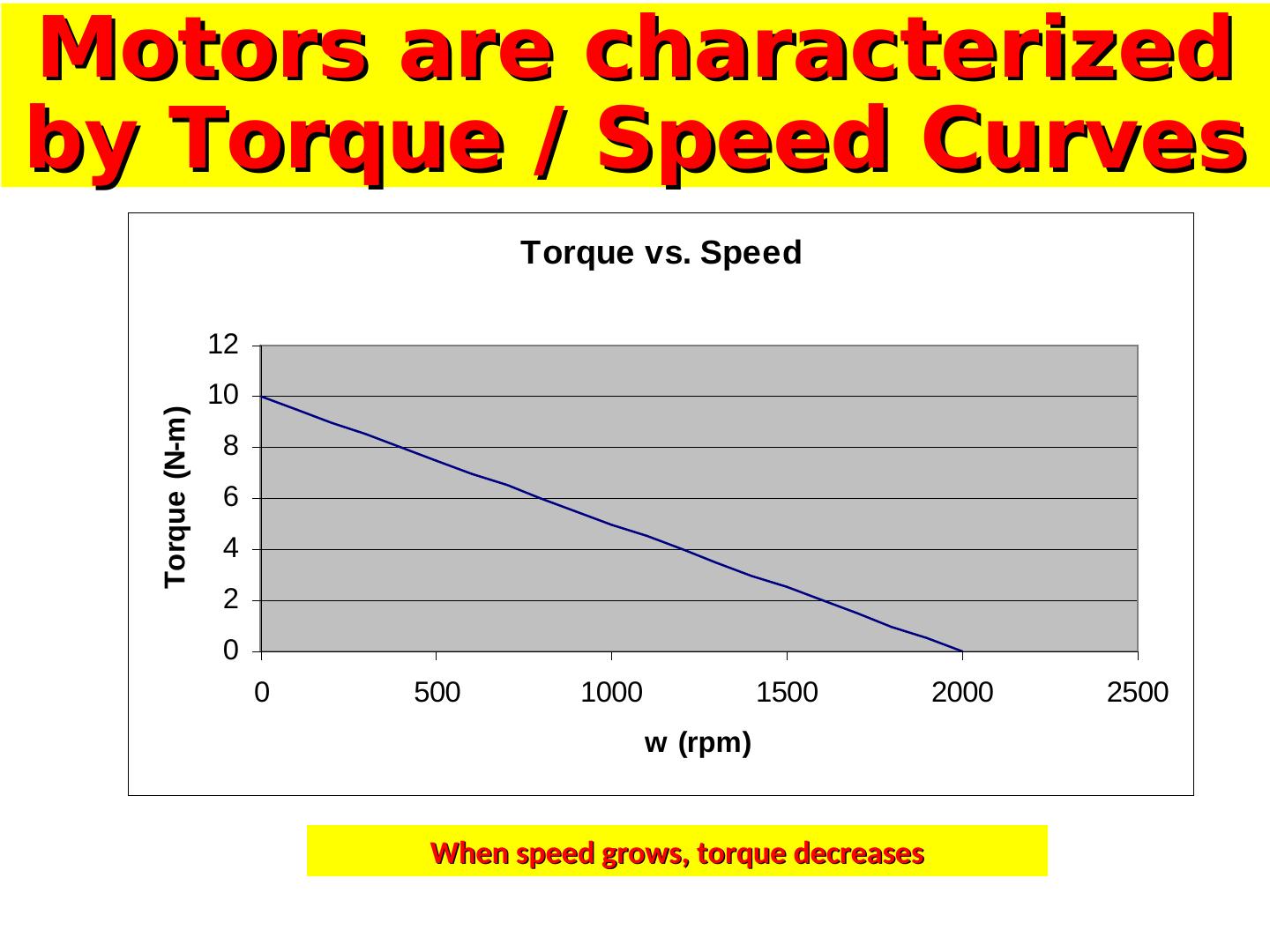
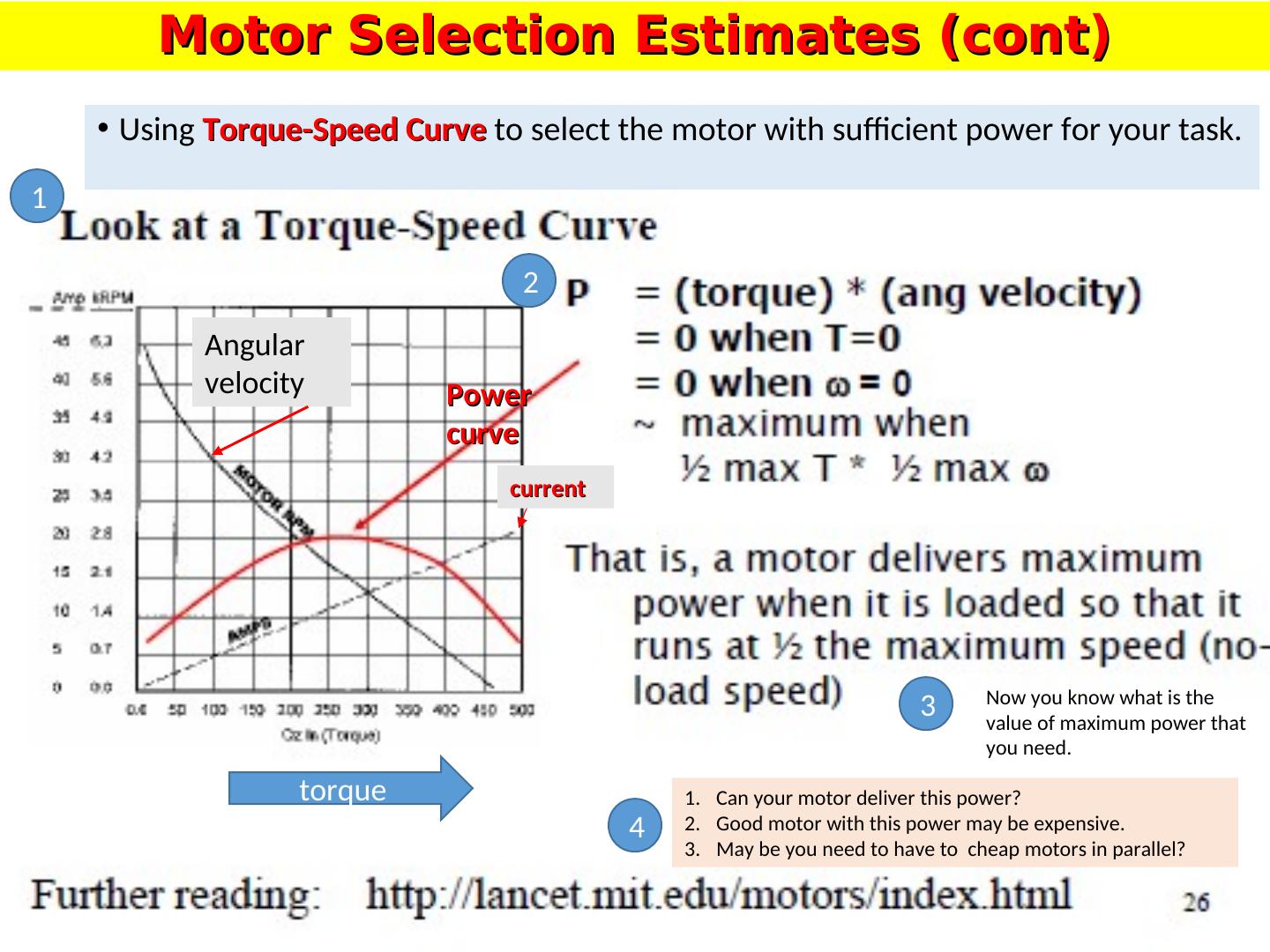
18 .Motors are characterized by Torque / Speed Curves Torque vs. Speed 12 10 Torque (N-m) 8 6 4 2 0 0 500 1000 1500 2000 2500 w (rpm) When speed grows, torque decrea) ses
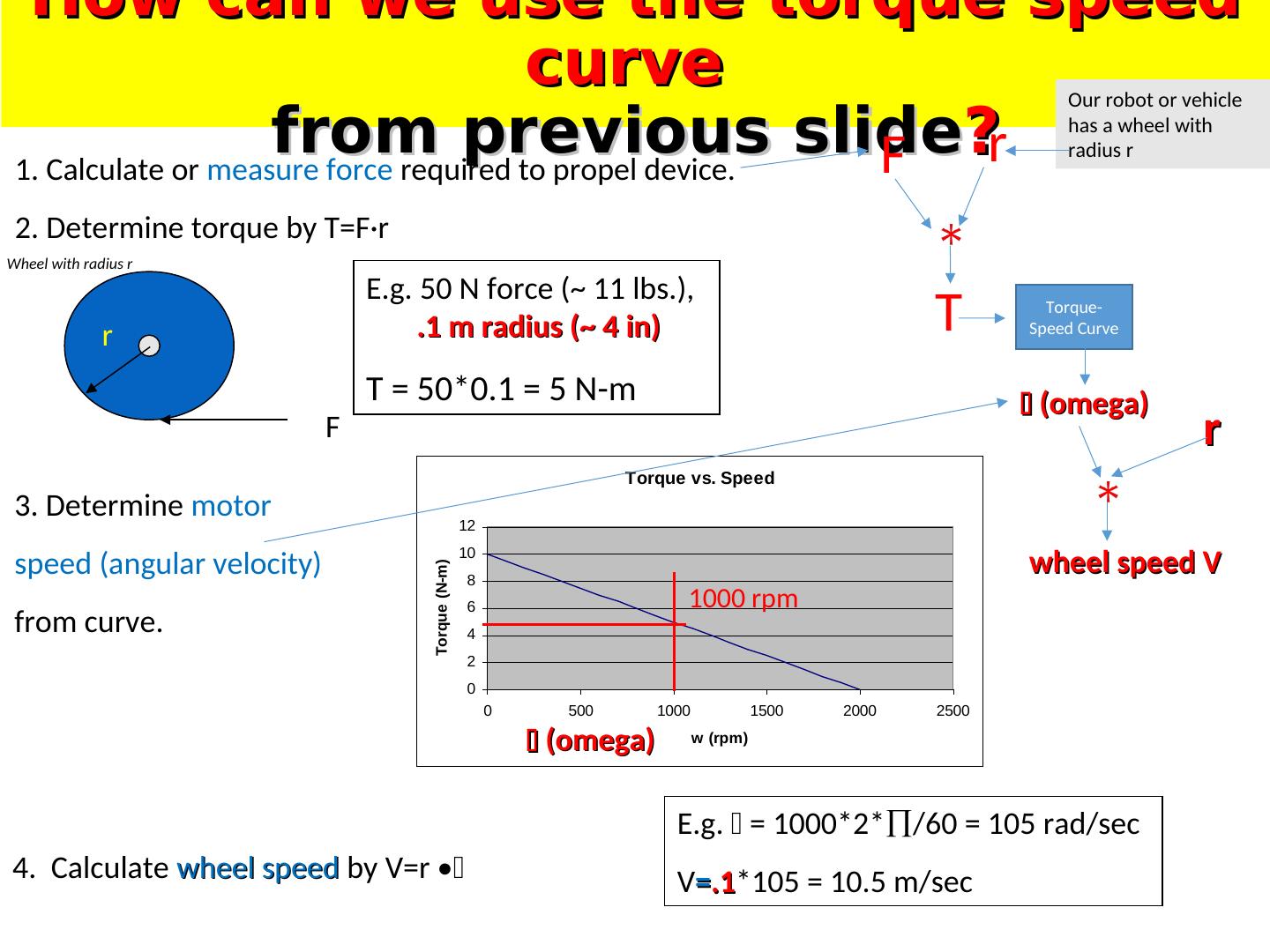
19 . How can we use the torque speed curve Our robot or vehicle from previous 1. Calculate or measure force required to propel device. slide F ?r has a wheel with radius r 2. Determine torque by T=F·r Wheel with radius r E.g. 50 N force (~ 11 lbs.), r .1 m ra) dius (omega) ~ 4 in) T Torque- Speed Curve T = 50*0.1 = 5 N-m (omega) omega) ) F r Torque vs. Speed 3. Determine motor 12 10 speed (angular velocity) wheel speed V Torque (N-m) 8 6 1000 rpm from curve. 4 2 0 0 500 1000 1500 2000 2500 (omega) omega) ) w (rpm) E.g. = 1000*2*/60 = 105 rad/sec 4. Calculate wheel speed by V=r • V=.1*105 = 10.5 m/sec .1
20 .Power is the rate at which work is done • Light bulb use about 100 Watts • Economy automobiles produce about 120 HP (90,000 W) • High performance jet engines produce about 50,000 HP (37 million Watts)
21 .Power of a motor
22 . Power of a motor •P=T• •Power is the torque times the a) ngula) r velocity •If T is in N-m and is in rad/sec, power has the units of Watts
23 . Power in DC Motors Power vs. Speed • Think about a robot arm, you are 600 trying to select the motors for 500 shoulder. Power (Watts) 400 300 • How many motors? 200 • How long the arm? 100 • How many motors in the lower part of 0 0 500 1000 1500 2000 2500 the arm? Speed (rpm) • How to transmit motion to fingers?
24 . Calculating power from speed and torque of the motor • Spreadsheet application converts motor speed to rad/sec • Spreadsheet calculates power using P=T* 1rev 2rrad 1 min min 1rev 60 sec Revolutions Radians per Seconds per minute per minute revolution 100 * 2*3,14/60 = 10.5 Speed (rpm) Speed (rad/s) Torque (N-m) Power (W) 0 0.0 10 0 100 10.5 9.5 99 200 20.9 9 188 300 31.4 8.5 267 400 41.9 8 335 First convert to radians per second Speed increases, torque decreases
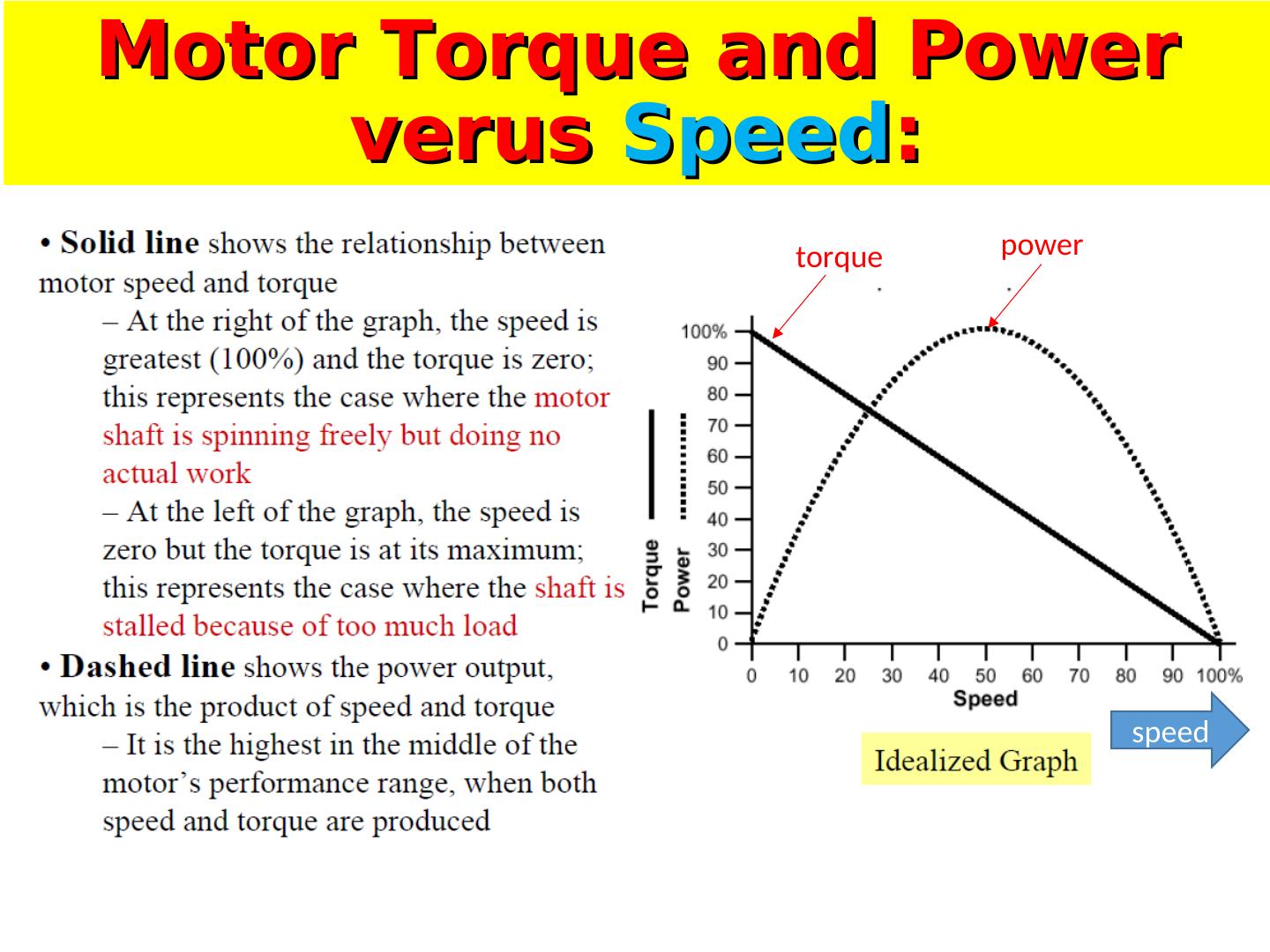
25 .Motor Torque and Power verus Speed: torque power speed
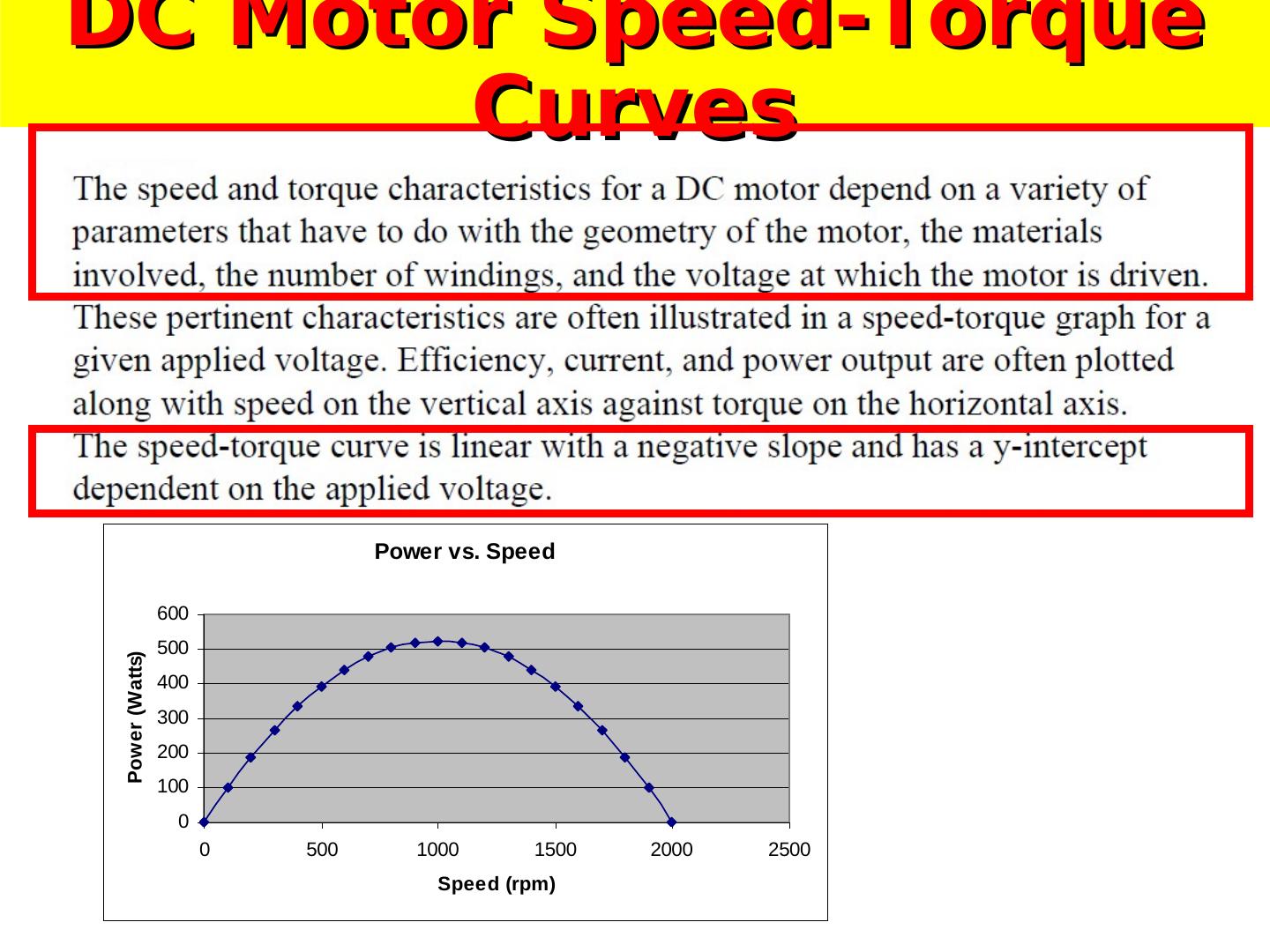
26 .DC Motor Speed-Torque Curves Power vs. Speed 600 500 Power (Watts) 400 300 200 100 0 0 500 1000 1500 2000 2500 Speed (rpm)
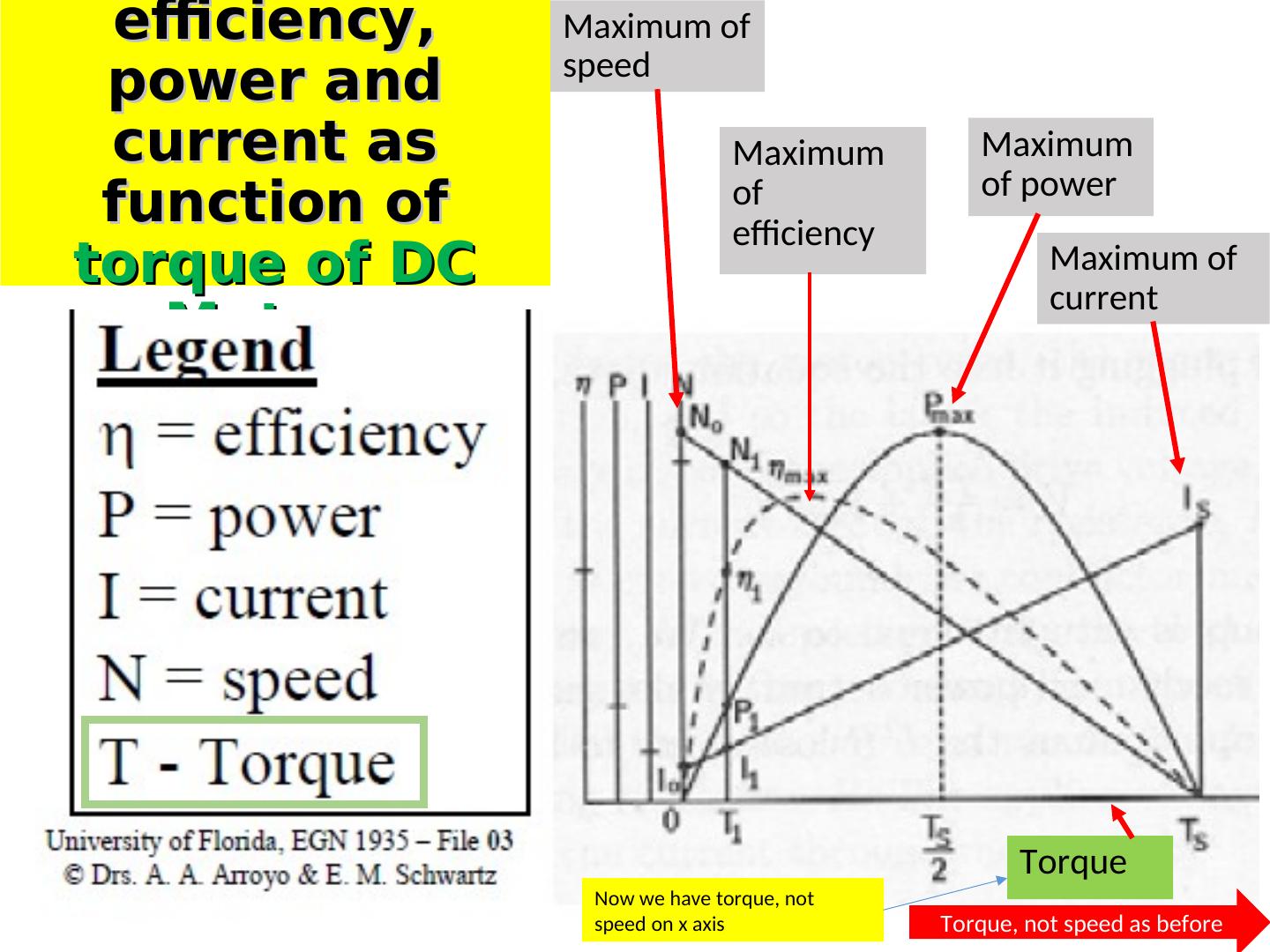
27 . efficiency, Maximum of power and speed current as Maximum Maximum of power function of of efficiency torque of DC Maximum of current Motors Torque Now we have torque, not speed on x axis Torque, not speed as before
28 . Motors and Robots • DC motors are best at high speed and low torque. torque • In contrast, robots need to pull loads • (i.e., move their bodies and manipulators, all of which have significant mass), • thus requiring more torque and less speed. speed • As a result, the performance of a DC motor typically needs to be adjusted. What do you • How? think? Copyright @ 2002 A. G. Billard
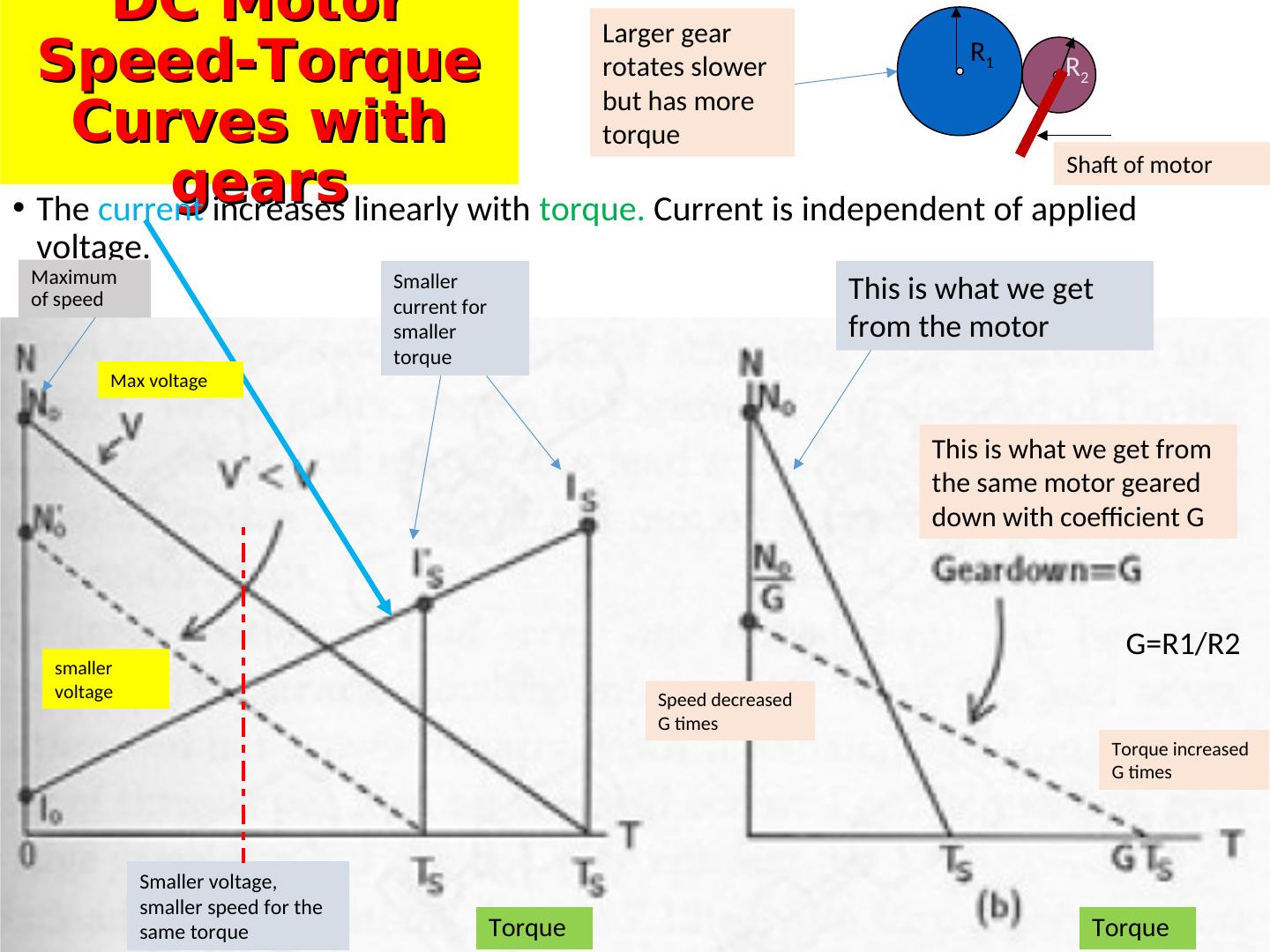
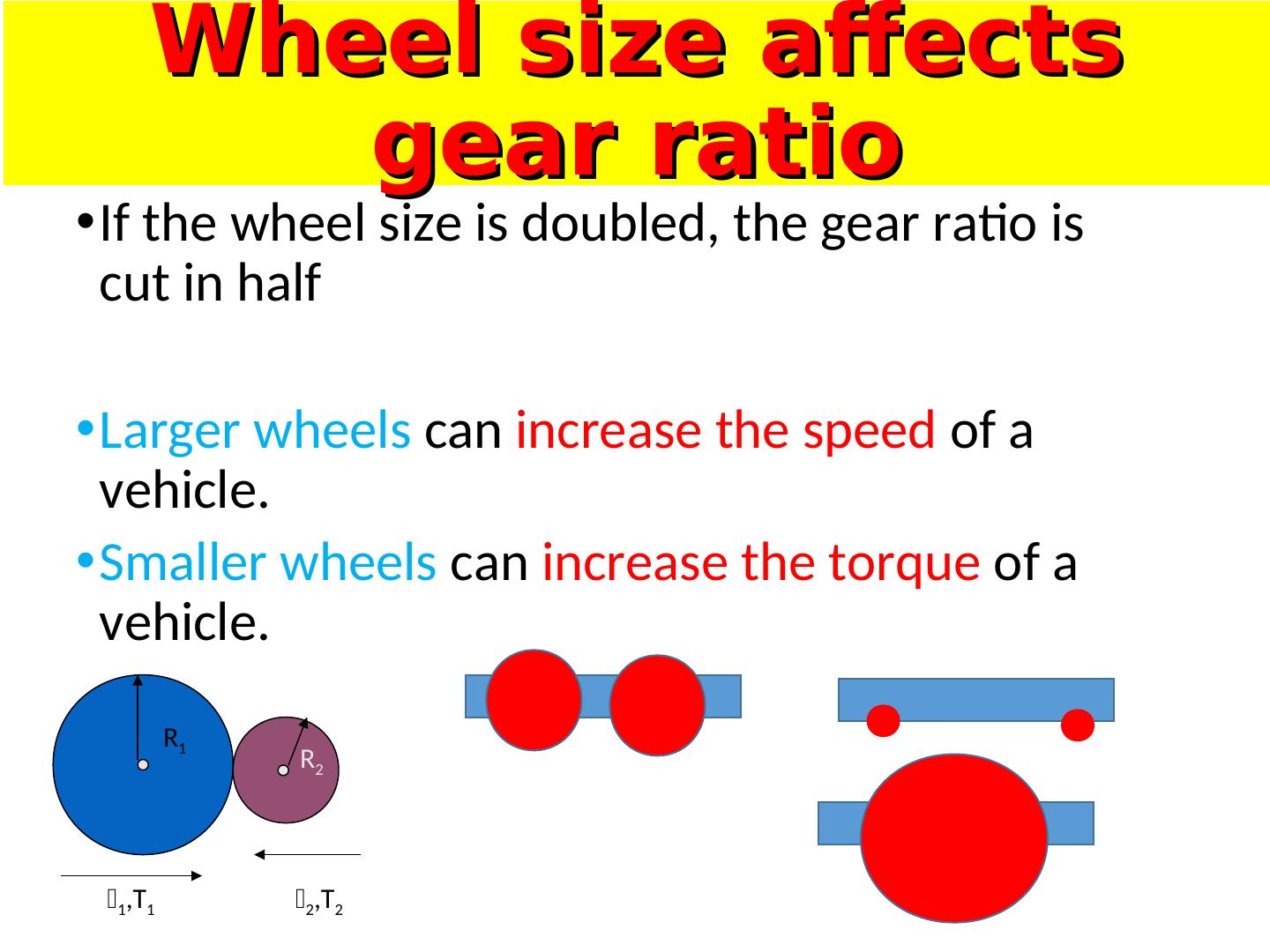
29 . DC Motor Larger gear Speed-Torque rotates slower R R 1 2 Curves with but has more torque gears ,T Shaft ,T of motor • The current increases linearly with torque. Current is independent of applied 1 1 2 2 voltage. Maximum Smaller of speed current for This is what we get smaller from the motor torque Max voltage This is what we get from the same motor geared down with coefficient G G=R1/R2 smaller voltage Speed decreased G times Torque increased G times Smaller voltage, smaller speed for the same torque Torque Torque
相关推荐

加关注
3秒后跳转登录页面
去登陆

