





























- 快召唤伙伴们来围观吧
- 微博 QQ QQ空间 贴吧
- 文档嵌入链接
- 复制
- 微信扫一扫分享
- 已成功复制到剪贴板
05_Actuators Intro, DC Motors
A robot must be able to interact physically with the environment in which it is operating
Actuators are the components of a robot that enable it to affect the environment, say, by exerting forces upon it or moving through it
We’ll take a look at:1.Electric motors 2.Artificial muscles 3.Pneumatics & hydraulics
展开查看详情
1 .Robot Joints
2 . Robot Joints •Robot joints can be either rotary (also known as revolute) or prismatic (telescoping)
3 . Robot Joints (cont…) •Prismatic Cartesian robot • Actuators are used in order to produce mechanical movement in robots. Rotary SCARA robot
4 . Introduction 1. A robot must be able to interact physically with the environment in which it is operating 2. Actuators are the components of a robot that enable it to affect the environment, say, by exerting forces upon it or moving through it 3. We’ll take a look at: 1. Electric motors 2. Artificial muscles 3. Pneumatics & hydraulics
5 . Actuators • In this course we will only deal with electrical motors • In past we built pneumatic robots which you can still find in the lab. – We will build them again after purchasing air compressor • My first robot was very strong and it was hydraulic. – It pissed hot oil at students in Warsaw.
6 . Actuator Control 1. Robots are classified by control method into servo and non-servo robots 2. Non-servo robots are essentially open-loop devices whose movements are limited to predetermined mechanical stops 3. Servo robots use closed-loop computer control to determine their motion
7 . Types of Actuators 1. Some of the most common actuators are: 1. Electric motors, the most common actuators in mobile robots, used both to provide location by powering wheels or legs, and for manipulation by actuating robot arms 2. Artificial muscles of various types, none of which are very good approximations of living muscles 3. Pneumatic and hydraulic actuators, used in industry for large manipulation tasks but seldom for mobile robots
8 . Actuators • In this lecture we will present: • Motor and Encoder • H-Bridge • Pulse-Width-Modulation (PWM) • Servos • Other robotic actuators
9 . Actuators and motors • Most actuators convert electrical energy into mechanical energy through the use of electromagnetic fields and rotating wire coils. • When a voltage is applied to a motor, it outputs a fixed amount of mechanical power • (usually to a shaft, gear, and/or wheel), • spinning at some speed • with some amount of torque.
10 .Electric Motors
11 . Electrical Actuators • easy to control • from mW to MW • normally high velocities 1000 - 10000 rpm • several types • accurate servo control • ideal torque for driving • excellent efficiency • autonomous power system difficult
12 . Electric actuators •Mainly rotating but also linear ones are available •linear movement with gear or with real linear motor
13 . Electrical Actuator Types • DC-motors • brushless DC-motors • asynchronous motors Not discussed • synchronous motors • reluctance motors (stepper motors)
14 . Electric Motors 1. Electric motors are the most common source of torque for mobility and/or manipulation in robotics 2. The physical principle of all electric motors is that when an electric current is passed through a conductor (usually a coil of wire) placed within a magnetic field, a force is exerted on the wire causing it to move
15 . How Do Electric Motors Work?
16 . Components Of An Electric Motor • The principle components of an electric motor are: 1. North and south magnetic poles to provide a strong magnetic field. 1. Being made of bulky ferrous material they traditionally form the outer casing of the motor and collectively form the stator 2. An armature, which is a cylindrical ferrous core rotating within the stator and carries a large number of windings made from one or more conductors Stator (Rotating) Commutator Armature Brushes Brushes in fixed positions and in contact with the rotating commutator contacts. They carry direct A commutator, which rotates with the current to the coils, armature and consists of copper resulting in the required contacts attached to the end of the motion windings
17 . How Do Electric Motors Work? 1. The classic DC motor has a rotating armature in the form of an electromagnet 2. A rotary switch called a commutator reverses the direction of the electric current twice every cycle, to flow through the armature so that the poles of the electromagnet push and pull against the permanent magnets on the outside of the motor 3. As the poles of the armature electromagnet pass the poles of the permanent magnets, the commutator reverses the polarity of the armature electromagnet. 4. During that instant of switching polarity, inertia keeps the motor going in the proper direction + + + - Stator + - - - Armature Rotating commutator (Rotating) Commutator Brushes
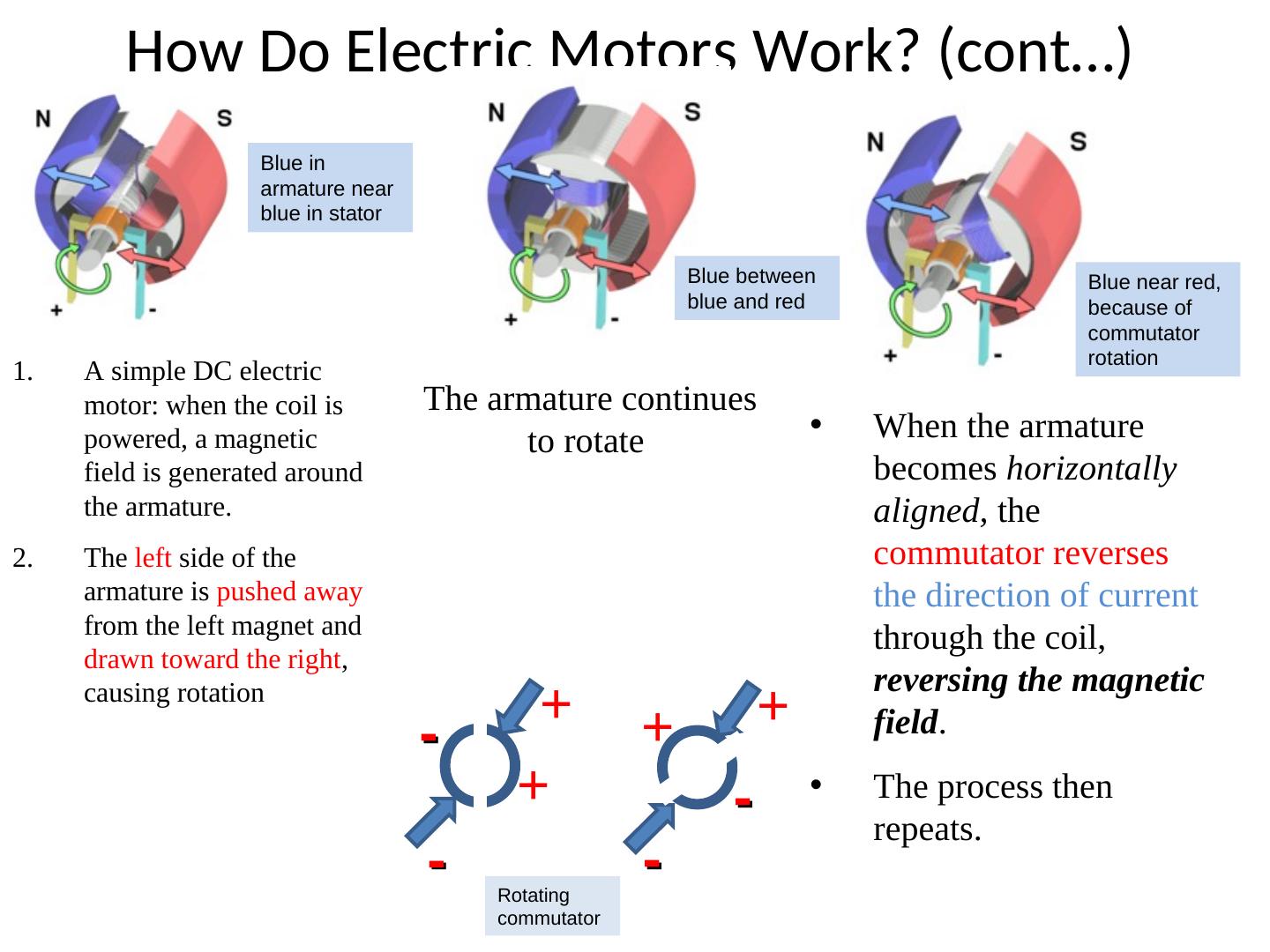
18 . How Do Electric Motors Work? (cont…) Blue in armature near blue in stator Blue between Blue near red, blue and red because of commutator rotation 1. A simple DC electric motor: when the coil is The armature continues powered, a magnetic to rotate • When the armature field is generated around becomes horizontally the armature. aligned, the 2. The left side of the commutator reverses armature is pushed away the direction of current from the left magnet and through the coil, drawn toward the right, reversing the magnetic causing rotation + + + - field. + - • The process then repeats. - Rotating - commutator
19 . Application of Electric Motors 1. Electric motors usually have a small rating, ranging up to a few horsepower 2. They are used in small appliances, battery operated vehicles, for medical purposes and in other medical equipment like x-ray machines 3. Electric motors are also used in toys, and in automobiles as auxiliary motors – for the purposes of seat adjustment, power windows, sunroof, mirror adjustment, blower motors, engine cooling fans and the like
20 .High quality DC-Motors • Not cheap • easy to control • 1W - 1kW • can be overloaded • brushes wear • limited overloading on high speeds Jussi Suomela HUT/Automation 20
21 . Motor Loading Motors apply torque in response to loading. Motor Loading happens when there is any opposing force (such as friction or a heavy mass) acting as a load and requiring the motor to output torque to overcome it. The higher the load placed on a motor output, the more the motor will “fight back” with an opposing torque. However, since the motor outputs a fixed amount of Motor applies torque to overcome power, the more torque the motor outputs, the the friction of a wheel turning slower its rotational speed. against the ground REMEMBER THAT MOTORS STALL. DO NOT DAMAGE THE SERVOS!! nt Draw A DC Motor draws a certain amount of electrical current (measured in amps) depending on how much If you keep increasing the load on a motor, load is placed on it. the motor eventually stops spinning or As the load increases on the motor, the more torque stalls. the motor outputs to overcome it and the more current the motor draws.
22 . DC-motor control • Controller + H-bridge • PWM-control • Speed control by controlling motor current=torque • Efficient small components • PID control
23 .H-Bridge
24 . H-Bridge • Hardware Implementation with Microcontroller: • 2 Digital output pins from microcontroller, [one at Gnd, one at Vcc] feed into a power amplifier • Alternative: – use only 1 digital output pin plus one inverter, – then feed into a power amplifier
25 .Power Amplifier
26 .This was a kind of projects in this class 30 years ago. Now we use ready boards.
27 .Experiment with a DC motor. How to measure the torque?
28 . Experiment with a DC motor. How to measure motor’s Top Speed in RPM? Count pulses
29 .Program to measure speed
相关推荐

加关注
3秒后跳转登录页面
去登陆

