




















- 快召唤伙伴们来围观吧
- 微博 QQ QQ空间 贴吧
- 文档嵌入链接
- 复制
- 微信扫一扫分享
- 已成功复制到剪贴板
18 Generalized Braitenberg Vehicles
Lego Robots
DRIVE SYSTEMS
A Brief History of Robotics
W. Grey Walter’s Tortoise
Artificial Intelligence Robots
Basic idea of Braitenberg Vehicles
Simple Creatures
More Complex Creatures
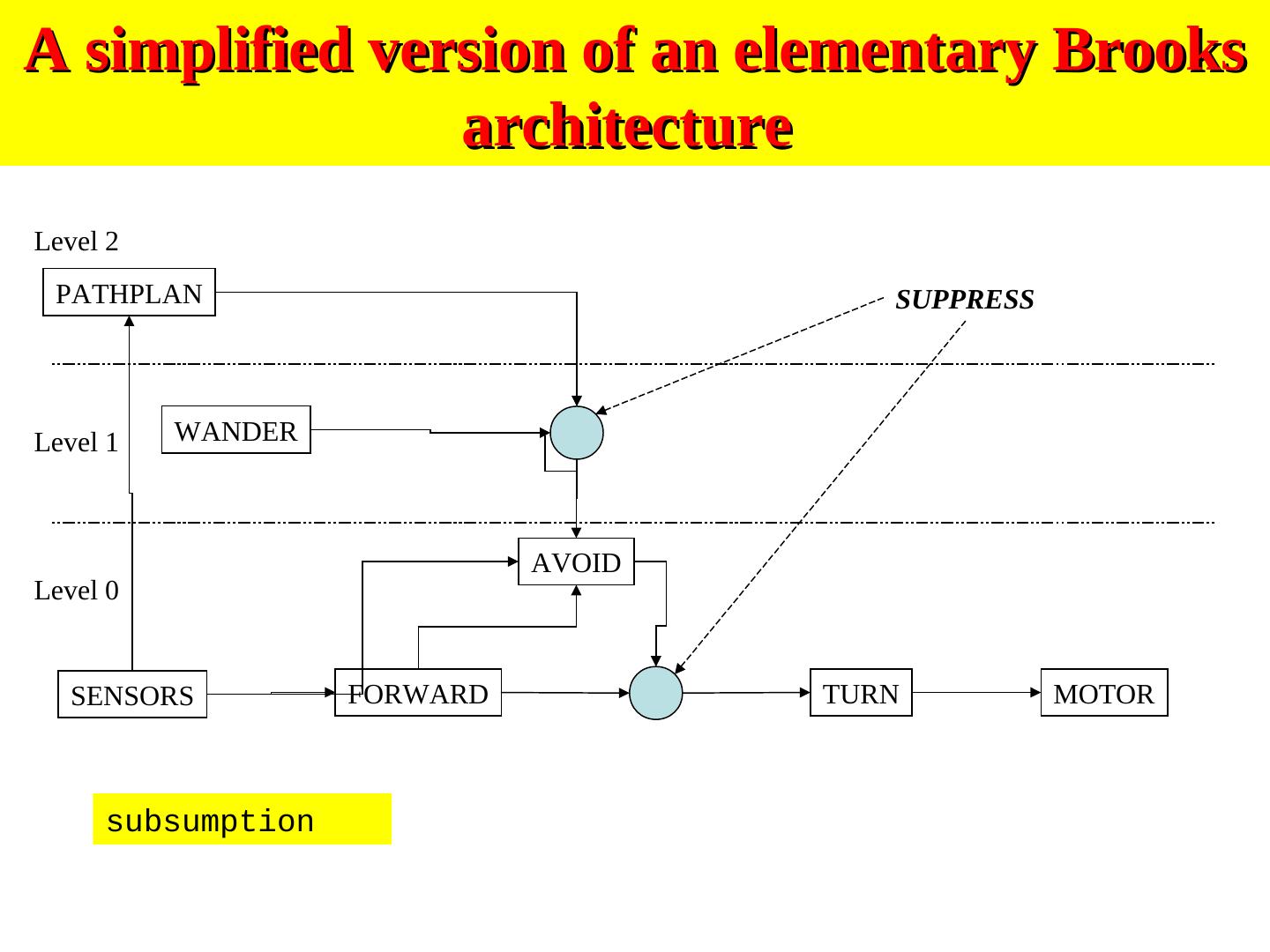
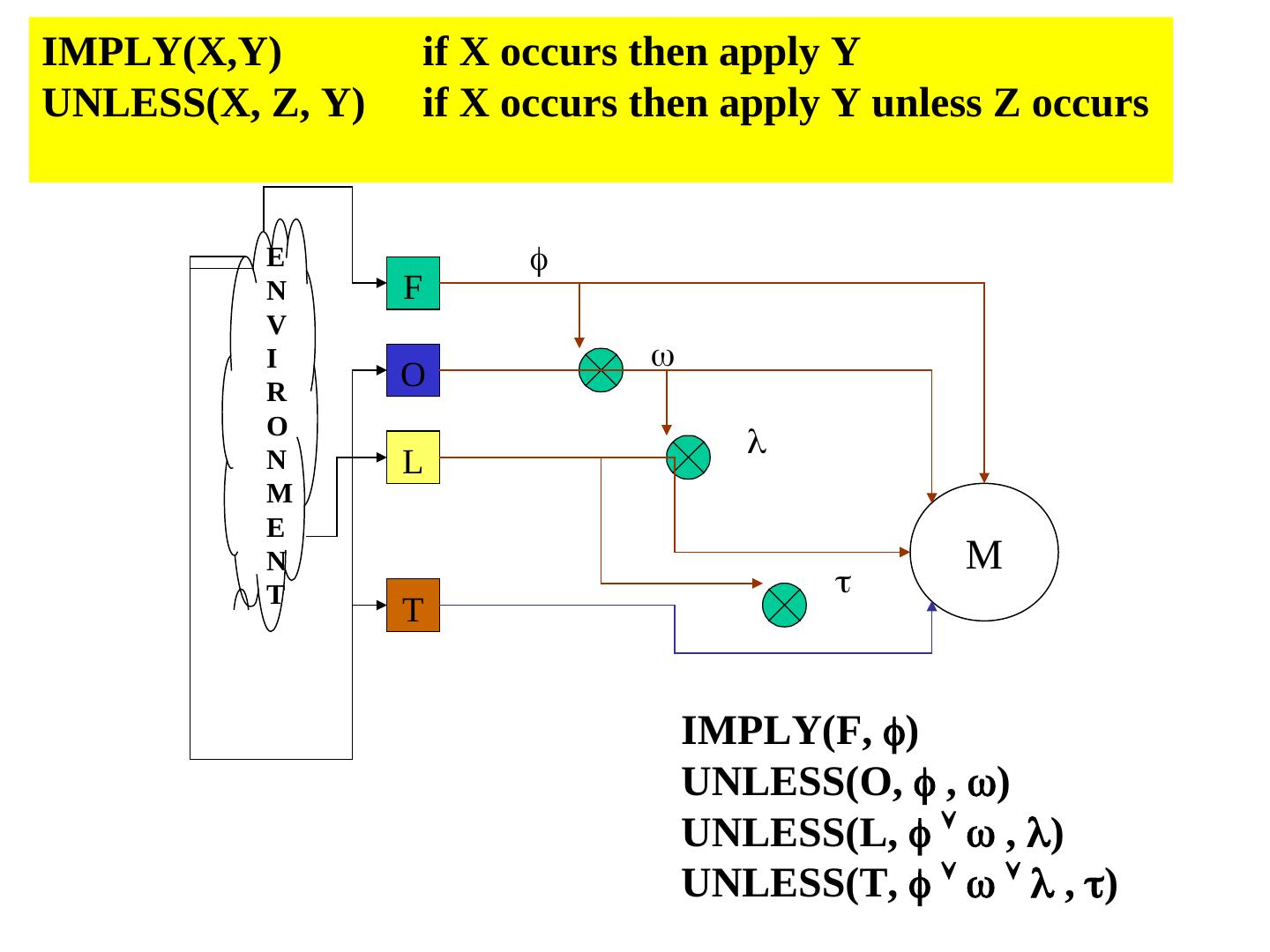
Subsumption Architecture of Brooks implemented in BV
展开查看详情
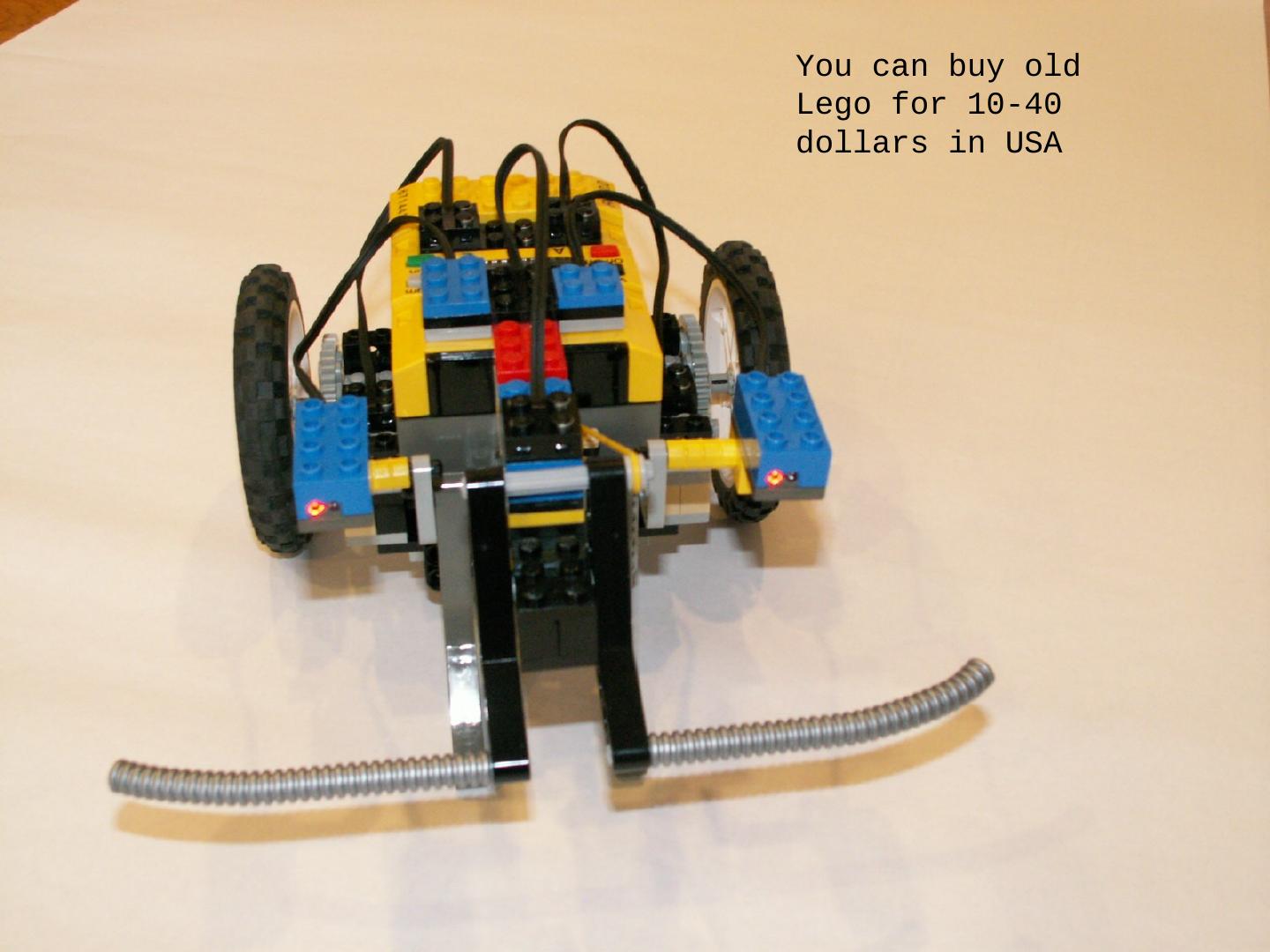
1 . Lego Robots • We built many robots from Lego kits. • We experimented with drives • We experimented with sensors • We experimented with “architectures’
2 .You can buy old Lego for 10-40 dollars in USA
3 .
4 .
5 .
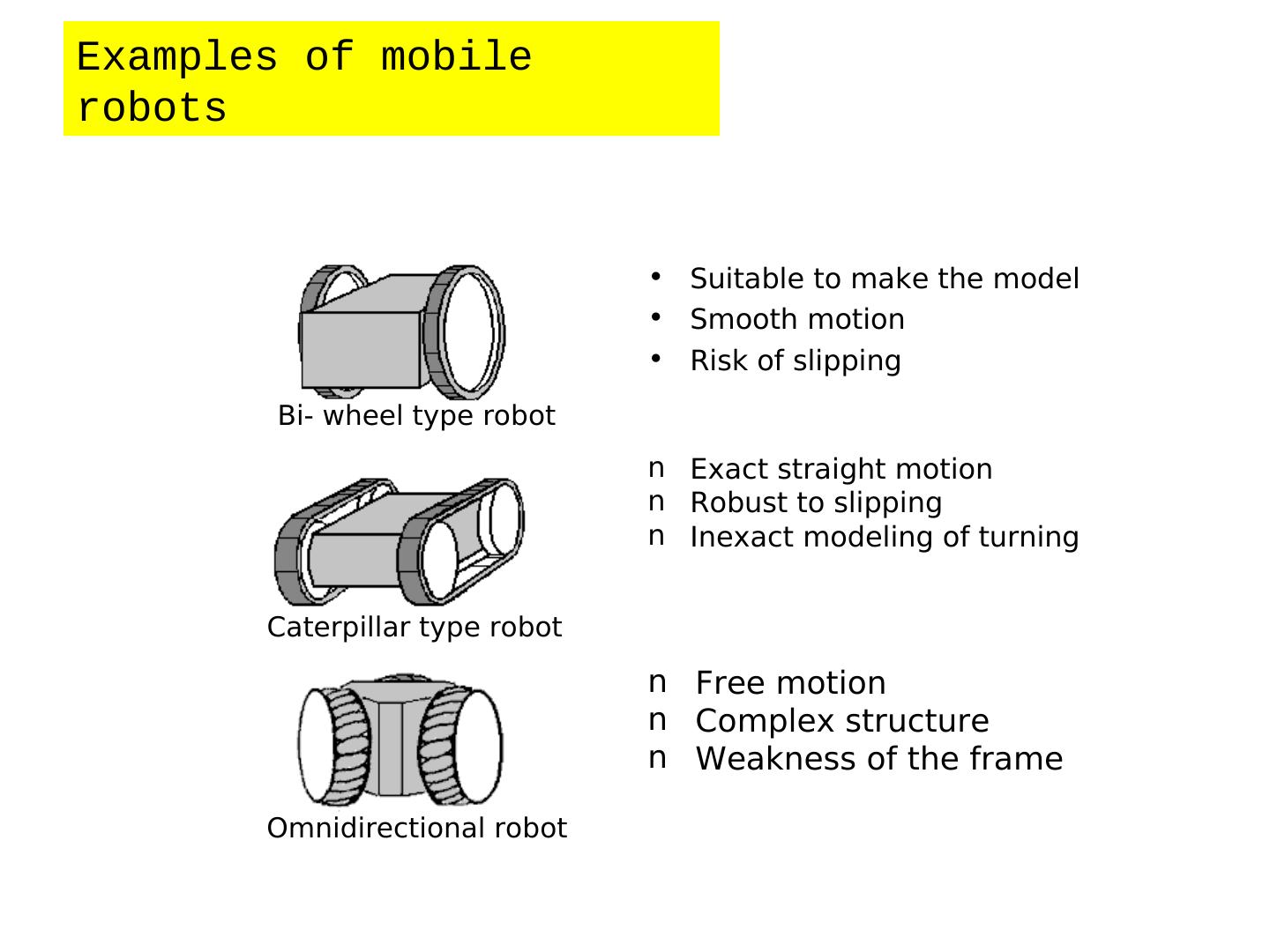
6 . DRIVE SYSTEMS • ‘differential steering’ • contrast to steering wheel • balance • other options: tanks, bicycles, etc
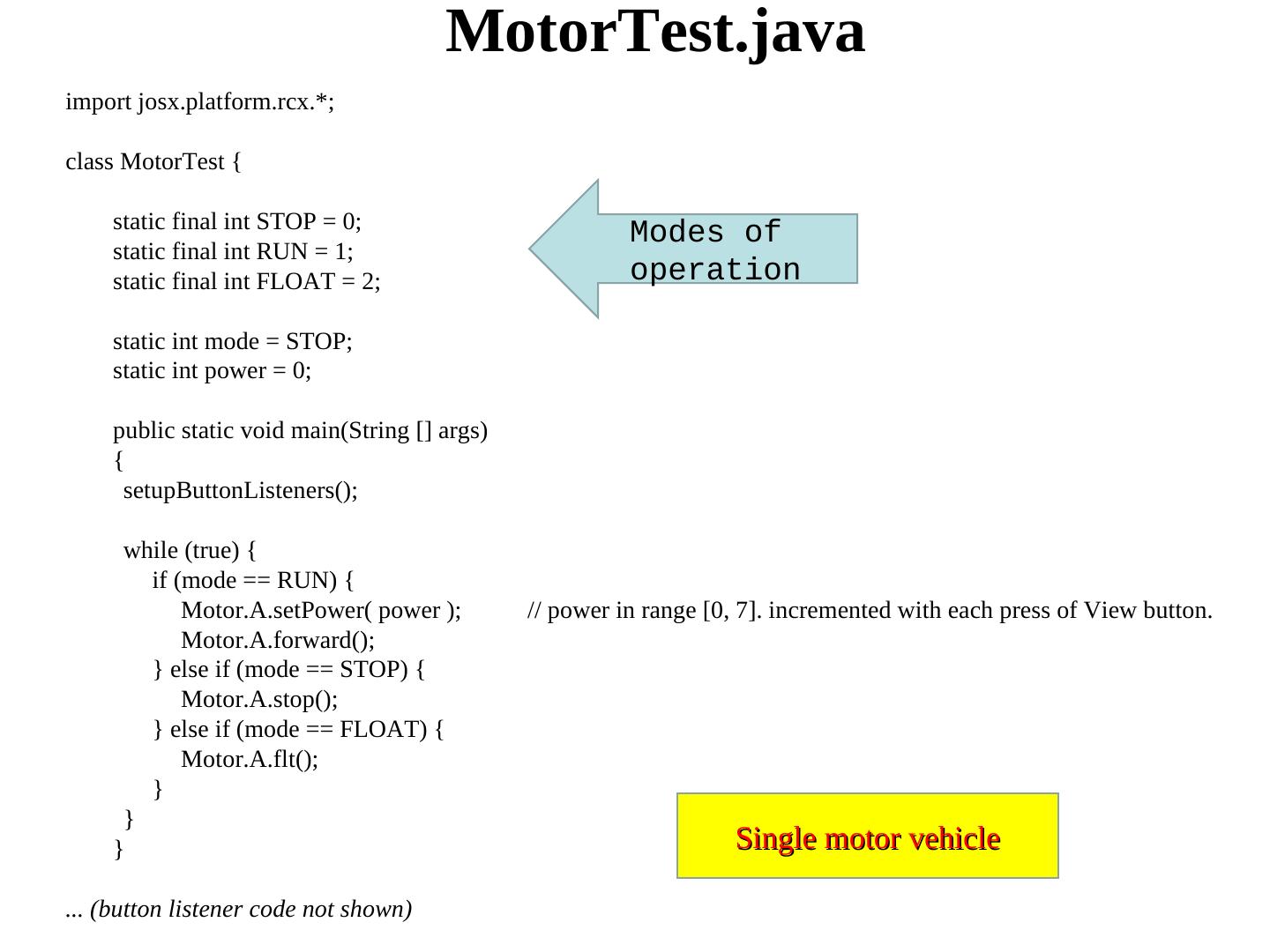
7 . Drive System • ratios and reduction—why? • gears: pro: efficient, accurate, strong con: need precise alignment, backlash • pulleys: pro: simplicity, flexibility con: slippage, poor durability • motor control: speed, direction, braking • note: Connector direction matters .
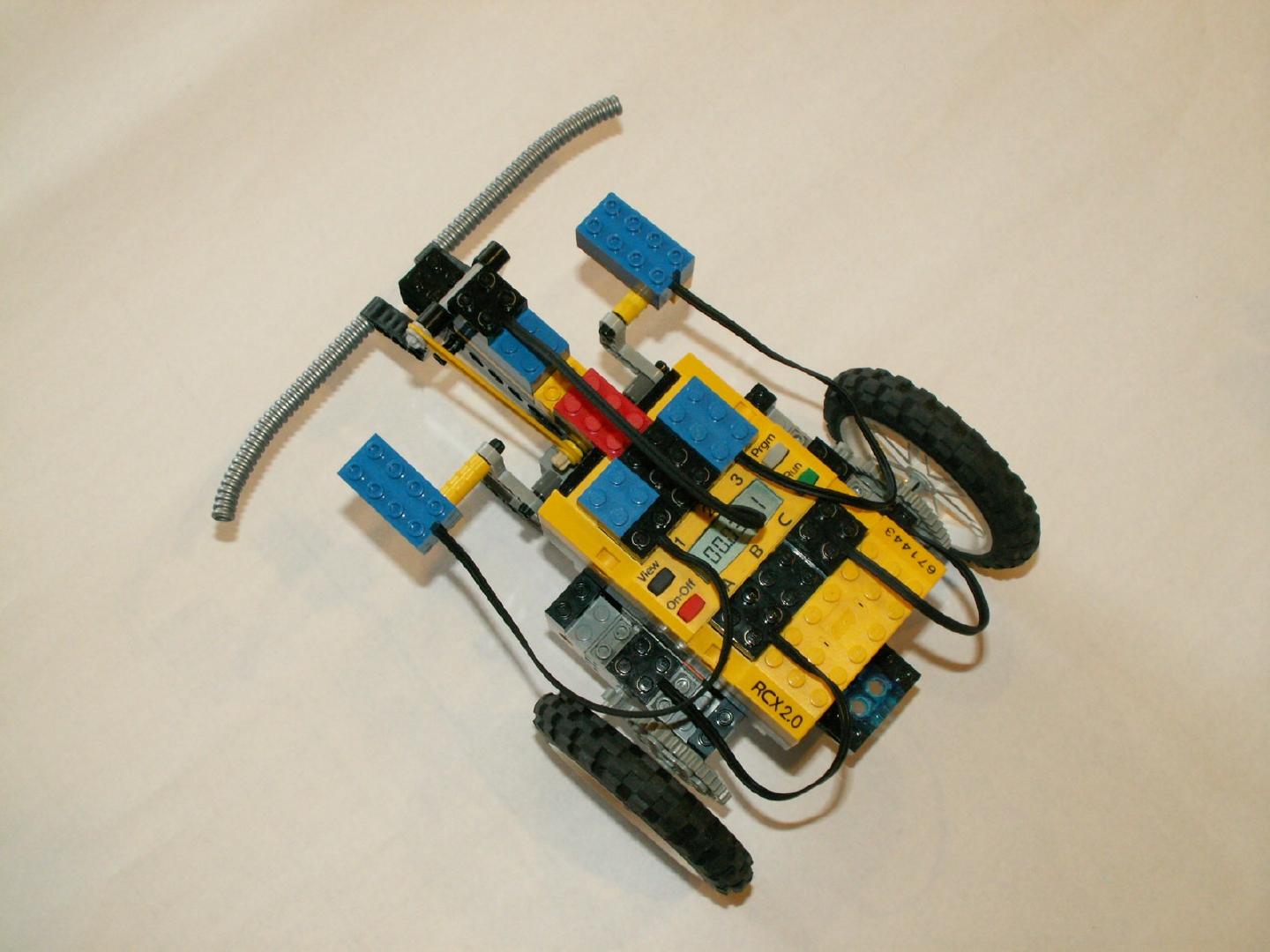
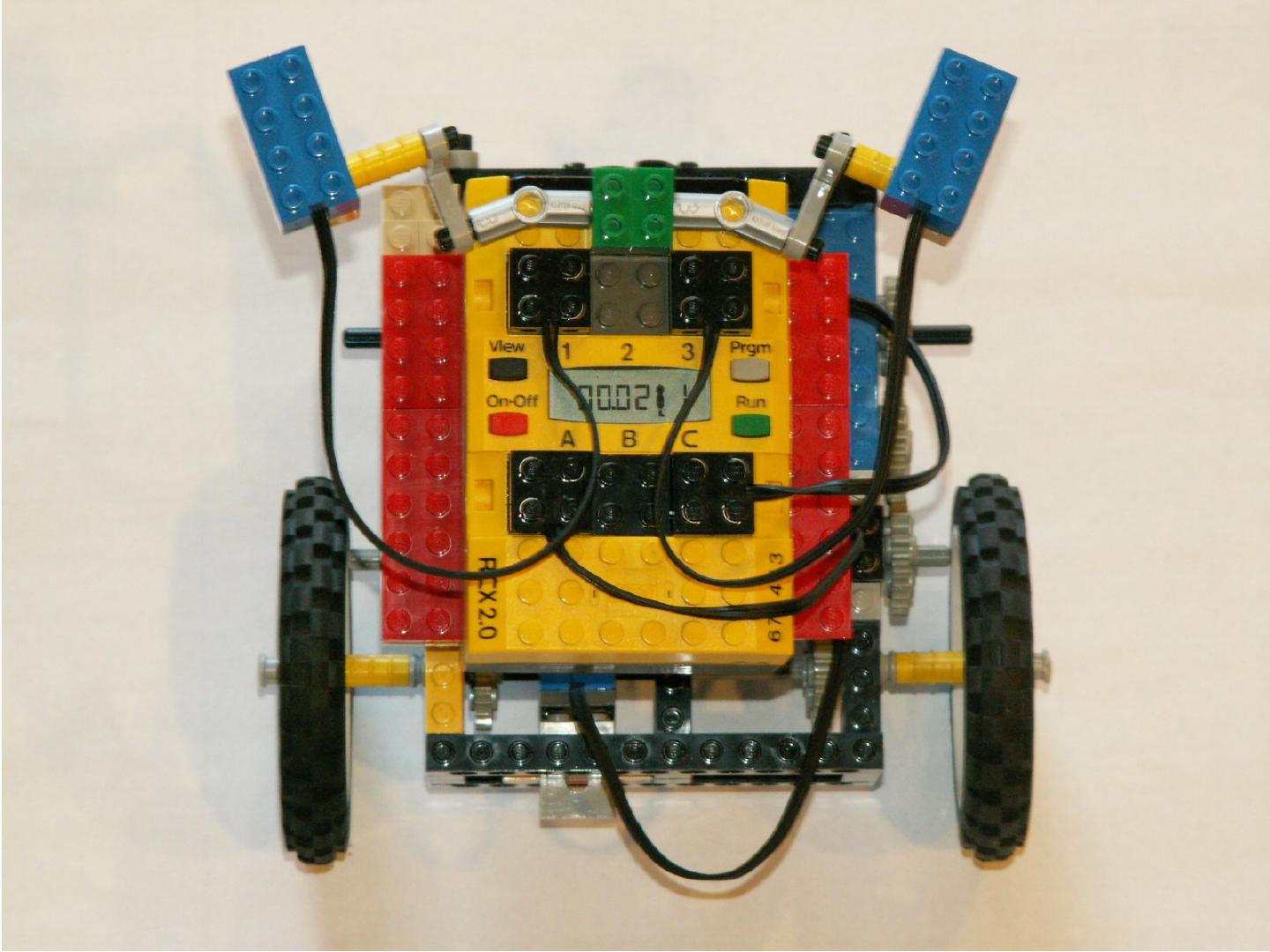
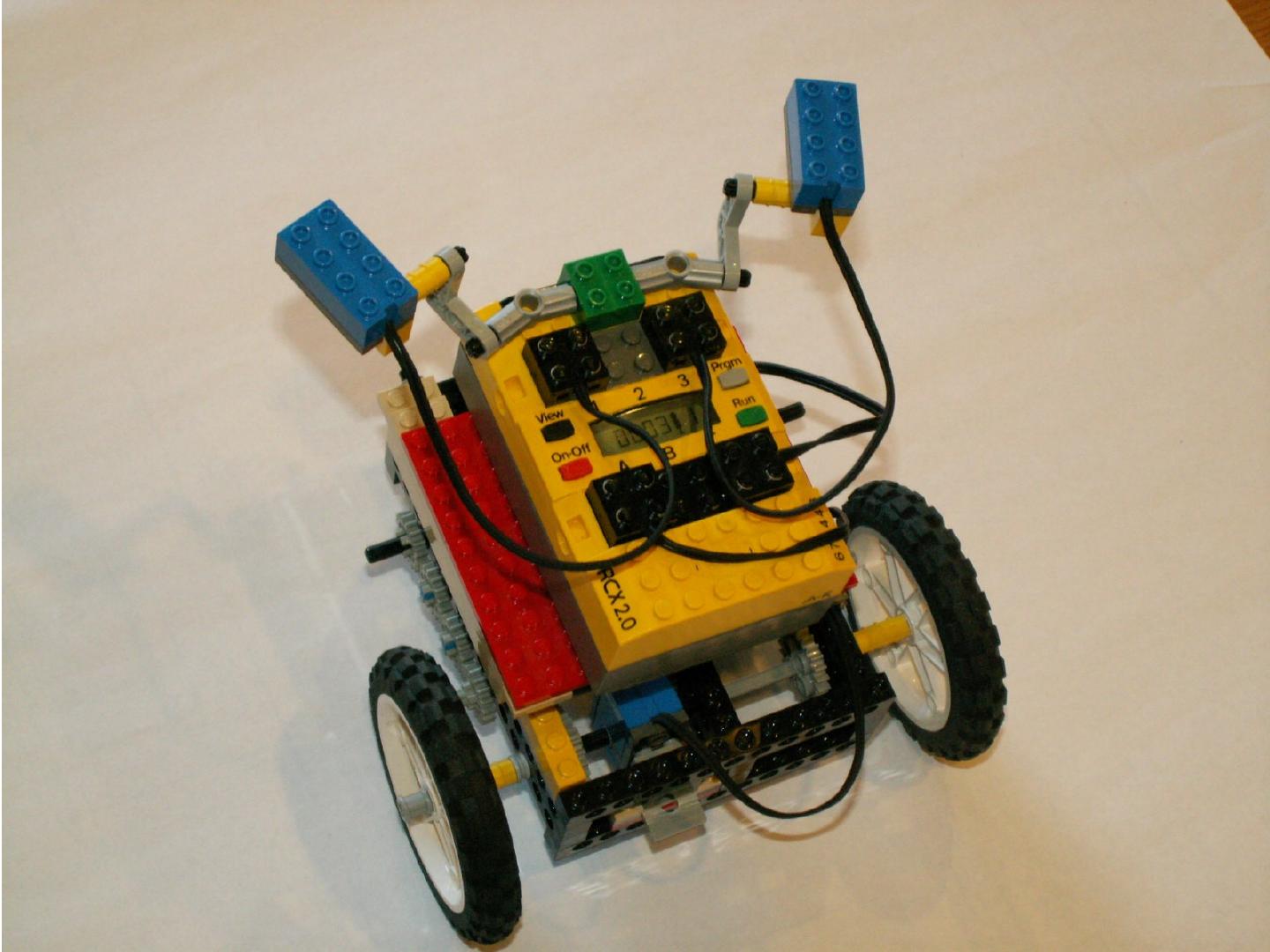
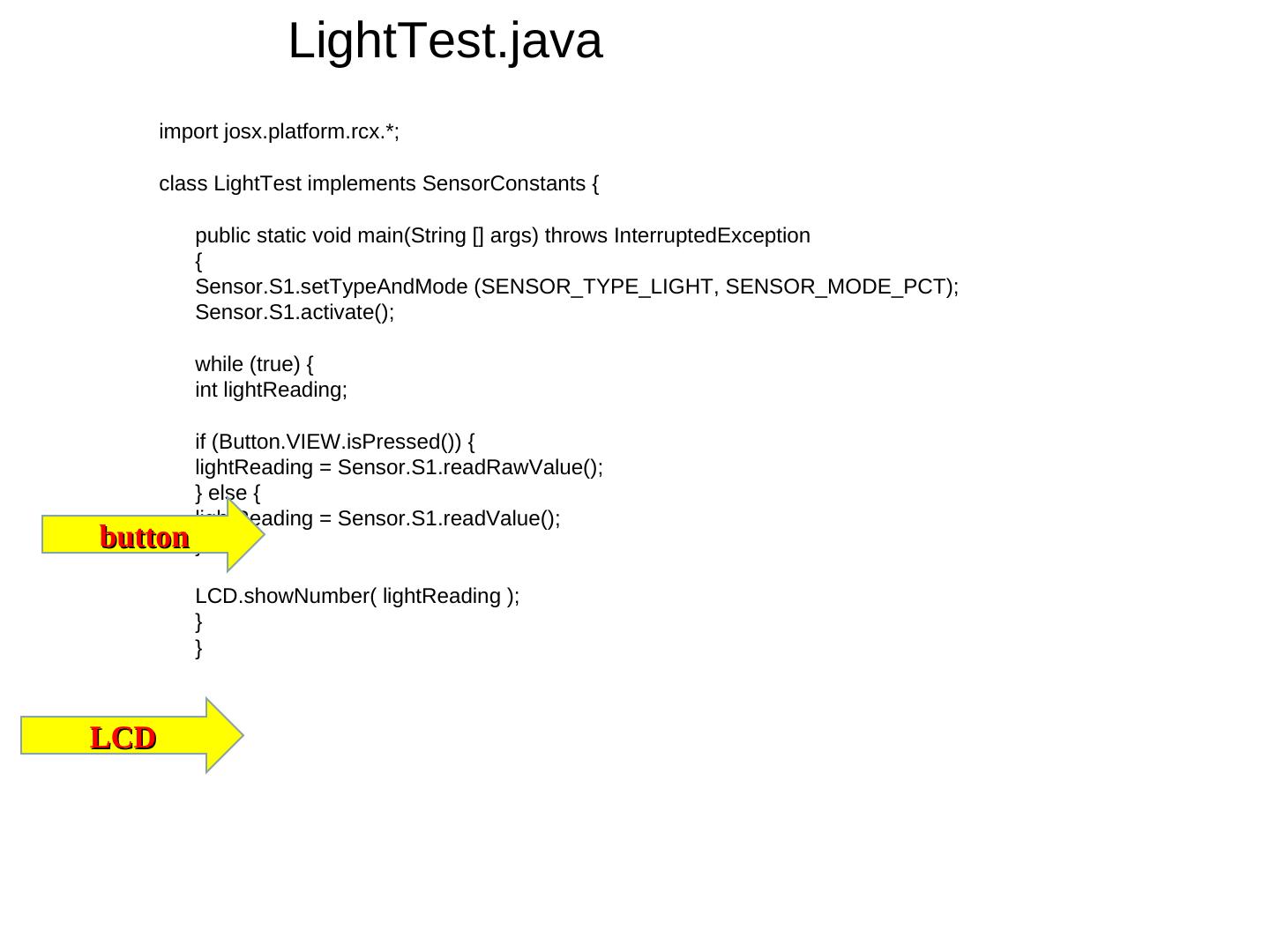
8 . Example Vehicle Design • Differentially-steered vehicle with pulley drive • See handout for construction details
9 .More advanced controls in microprocessors and FPGAs
10 . A Brief History of Robotics
11 . A Brief History of Robotics 1. Robotics grew out of the fields of control theory, cybernetics and AI 2. Robotics, in the modern sense, can be considered to have started around the time of cybernetics (1940s) 3. Early AI had a strong impact on how it evolved (1950s-1970s), emphasizing reasoning and abstraction, removal from direct situatedness and embodiment 4. In the 1980s a new set of methods was introduced and robots were put back into the physical world
12 . Why we apply Control Theory in robotics? • The mathematical study of the properties of automated control systems – Helps understand the fundamental concepts governing all mechanical systems (steam engines, aeroplanes, etc.) • Feedback: measure state and take an action based on it – Idea: continuously feeding back the current state and comparing it to the desired state, then adjusting the current state to minimize the difference (negative feedback). – The system is said to be self-regulating • E.g.: thermostats – if too hot, turn down, if too cold, turn up
13 . Control Theory through History • Thought to have originated with the ancient Greeks – Time measuring devices (water clocks), water systems • Forgotten and rediscovered in Renaissance Europe – Heat-regulated furnaces (Drebbel, Reaumur, Bonnemain) – Windmills • James Watt’s steam engine (the governor)
14 . Cybernetics • Pioneered by Norbert Wiener in the 1940s – Comes from the Greek word “kibernts” – governor, steersman • Combines principles of control theory, information science and biology • Sought principles common to animals and machines, especially with regards to control and communication • Studied the coupling between an organism and its environment
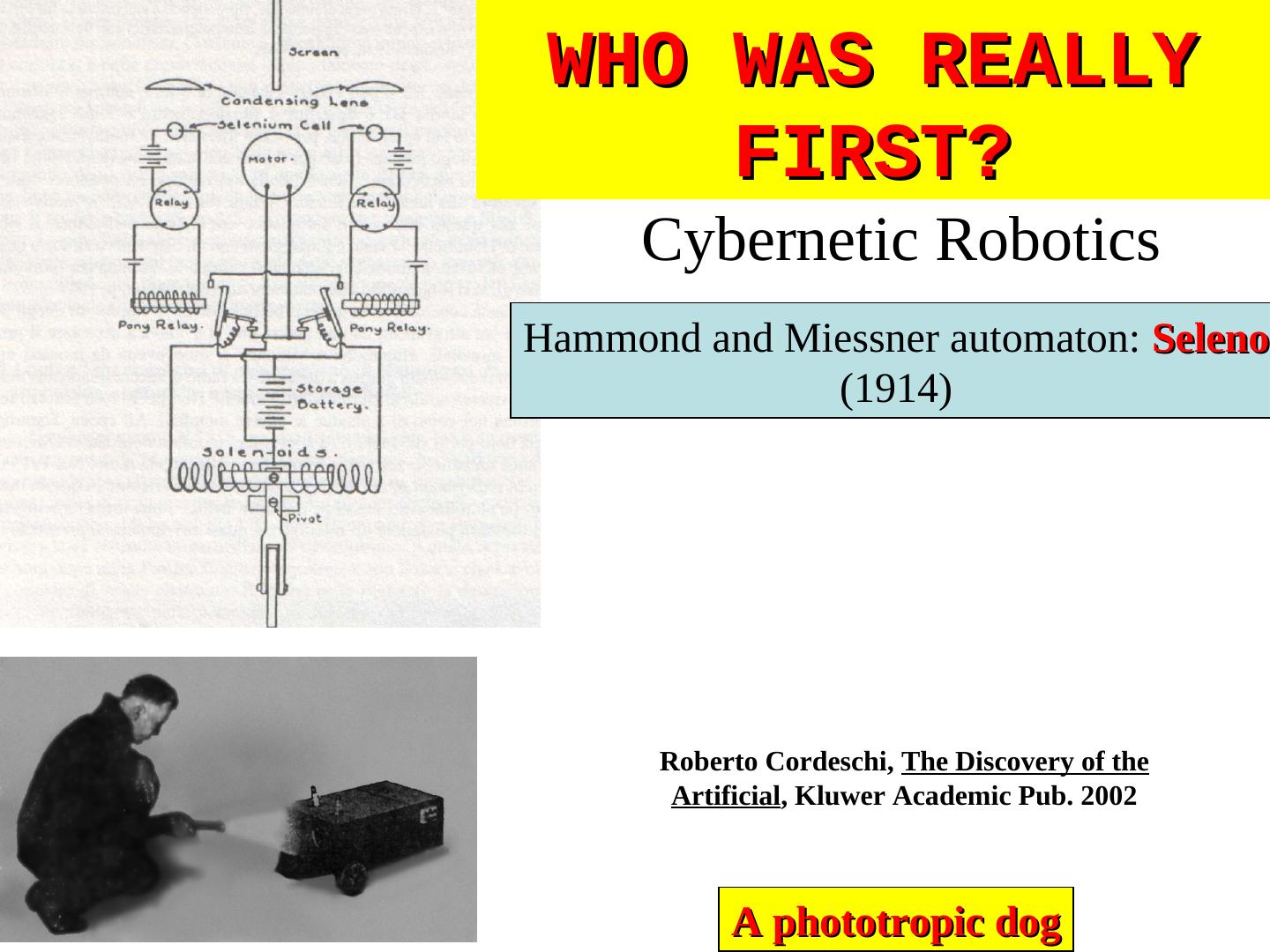
15 . WHO WAS REALLY FIRST? Cybernetic Robotics Hammond and Miessner automaton: Seleno (1914) Roberto Cordeschi, The Discovery of the Artificial, Kluwer Academic Pub. 2002 A phototropic dog
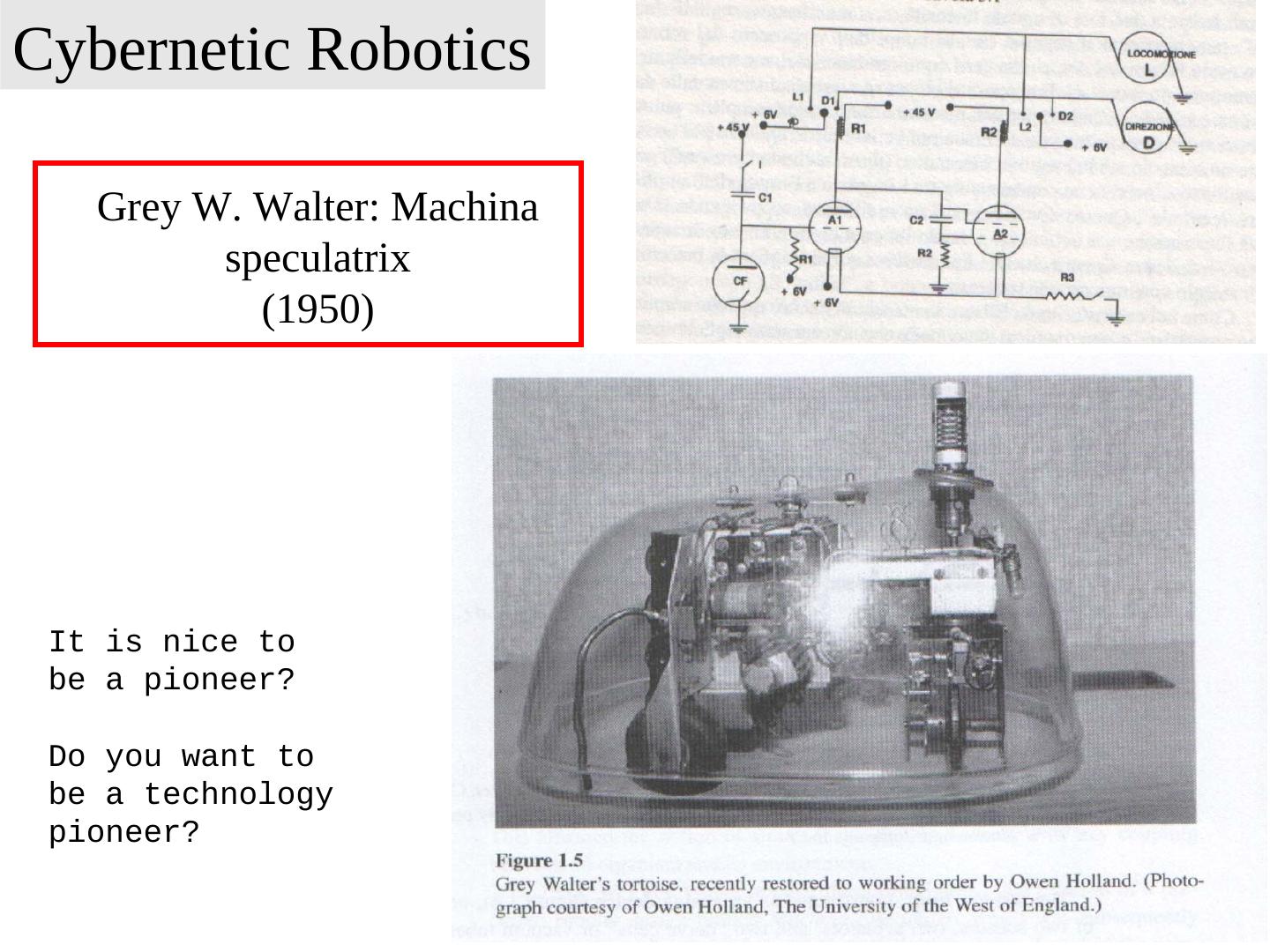
16 . W. Grey Walter’s Tortoise • “Machina Speculatrix” (1953) – 1 photocell, 1 bump sensor, 2 motor, 3 wheels, 1 battery • Behaviors: – seek light – head toward moderate light – back from bright light – turn and push – recharge battery • Uses reactive control, with behavior prioritization
17 .W. Grey Walter’s Tortoise
18 .• Grey W. Walter makes use of psychological terms when he describes his machine as: – "spontaneous," – "purposeful," – "independent" • Robot is able to "recognize" itself and other individuals of the same species. • Robot is able to exhibit a food-searching instinct – (it automatically went towards its 'nest' to recharge its batteries when they were about to run out). 1. Walter admitted that all this could be seen as nothing but a series of tricks. 2. Nonetheless, an outside observer, let us say a biologist, would have used just this mentalistic terminology had he witnessed this behavior in real animals.
19 .Cybernetic Robotics Grey W. Walter: Machina speculatrix (1950) A photosensible tortoise It is nice to be a pioneer? Do you want to be a technology pioneer?
20 . Principles of Walter’s Tortoise • Parsimony – Simple is better • Exploration or speculation – Never stay still, except when feeding (i.e., recharging) • Attraction (positive tropism) – Motivation to move toward some object (light source) • Aversion (negative tropism) – Avoidance of negative stimuli (heavy obstacles, slopes) • Discernment – Distinguish between productive/unproductive behavior (adaptation)
21 . Artificial Intelligence Robots
22 . Artificial Intelligence • Officially born in 1955 at Dartmouth University – Marvin Minsky, John McCarthy, Herbert Simon • Intelligence in machines – Internal models of the world – Search through possible solutions – Plan to solve problems – Symbolic representation of information – Hierarchical system organization – Sequential program execution
23 . AI and Robotics • AI influence to robotics: – Knowledge and knowledge representation are central to intelligence • Perception and action are more central to robotics • New solutions developed: behavior-based systems – “Planning is just a way of avoiding figuring out what to do next” (Rodney Brooks, 1987) • Distributed AI (DAI) – Society of Mind (Marvin Minsky, 1986): simple, multiple agents can generate highly complex intelligence • First robots were mostly influenced by AI (deliberative)
24 .Shakey and others • At Stanford Research Institute (late 1960s) • A deliberative system • Visual navigation in a very special world • STRIPS planner • Vision and contact sensors
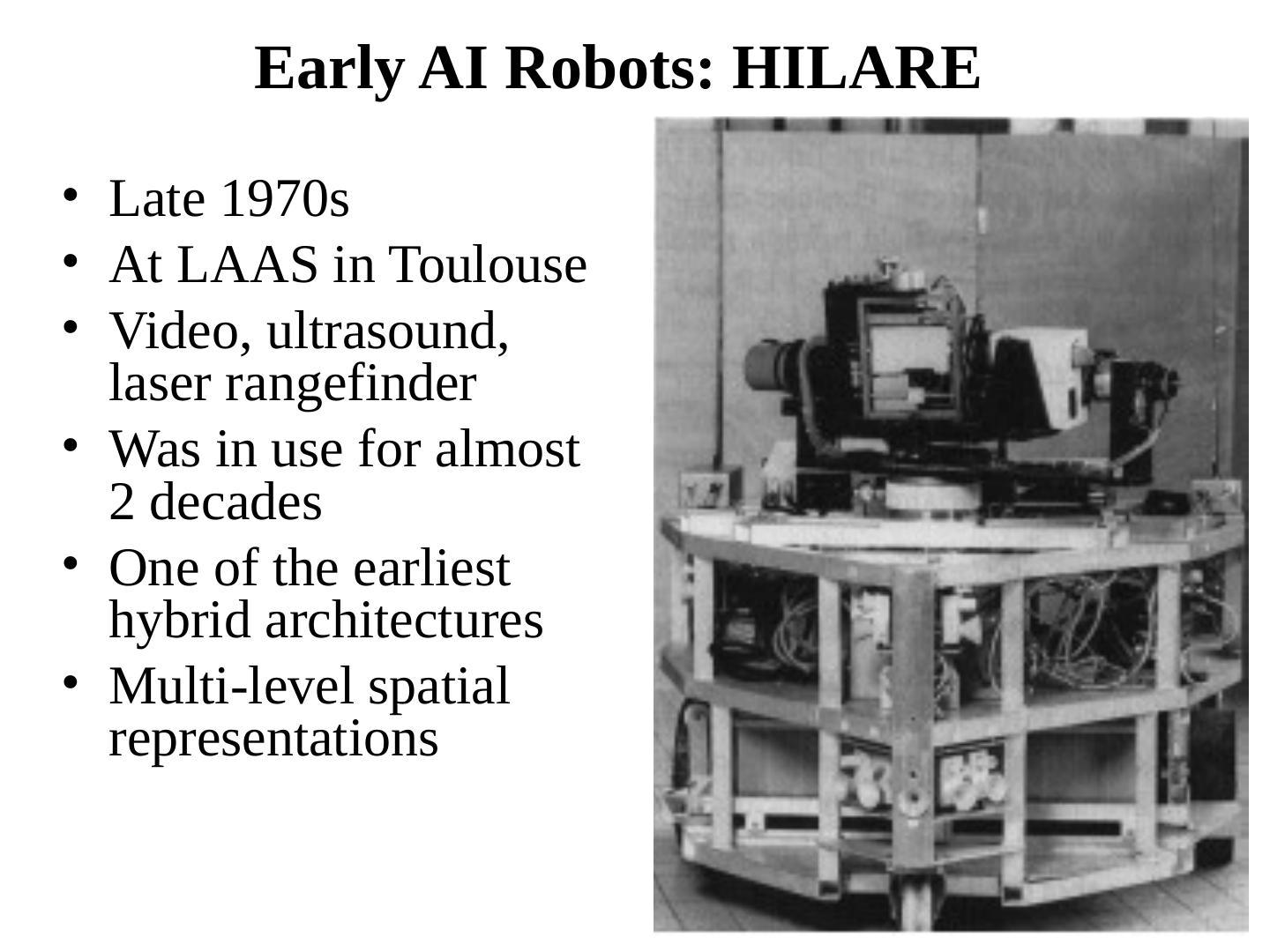
25 . Early AI Robots: HILARE • Late 1970s • At LAAS in Toulouse • Video, ultrasound, laser rangefinder • Was in use for almost 2 decades • One of the earliest hybrid architectures • Multi-level spatial representations
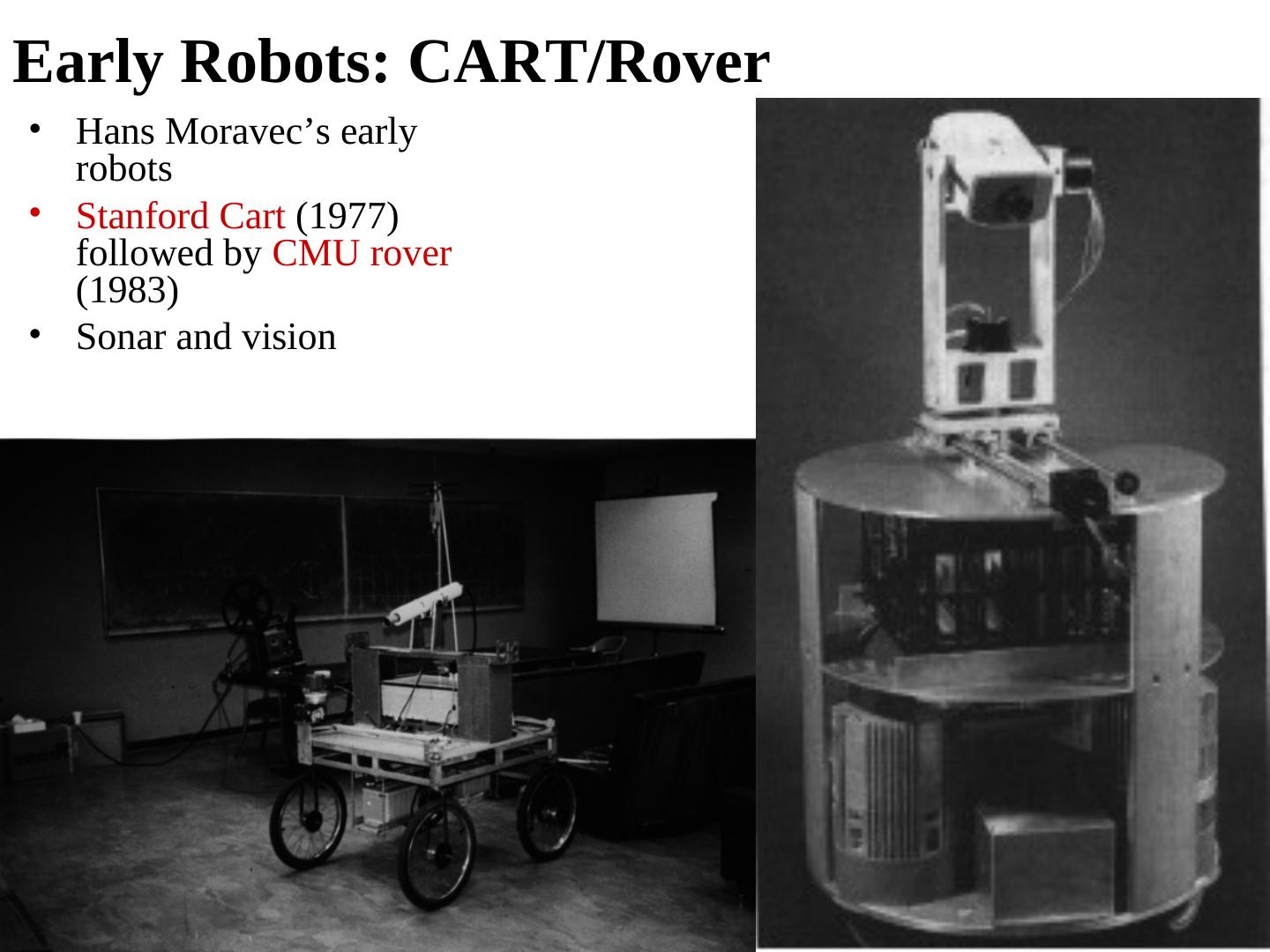
26 .Early Robots: CART/Rover • Hans Moravec’s early robots • Stanford Cart (1977) followed by CMU rover (1983) • Sonar and vision
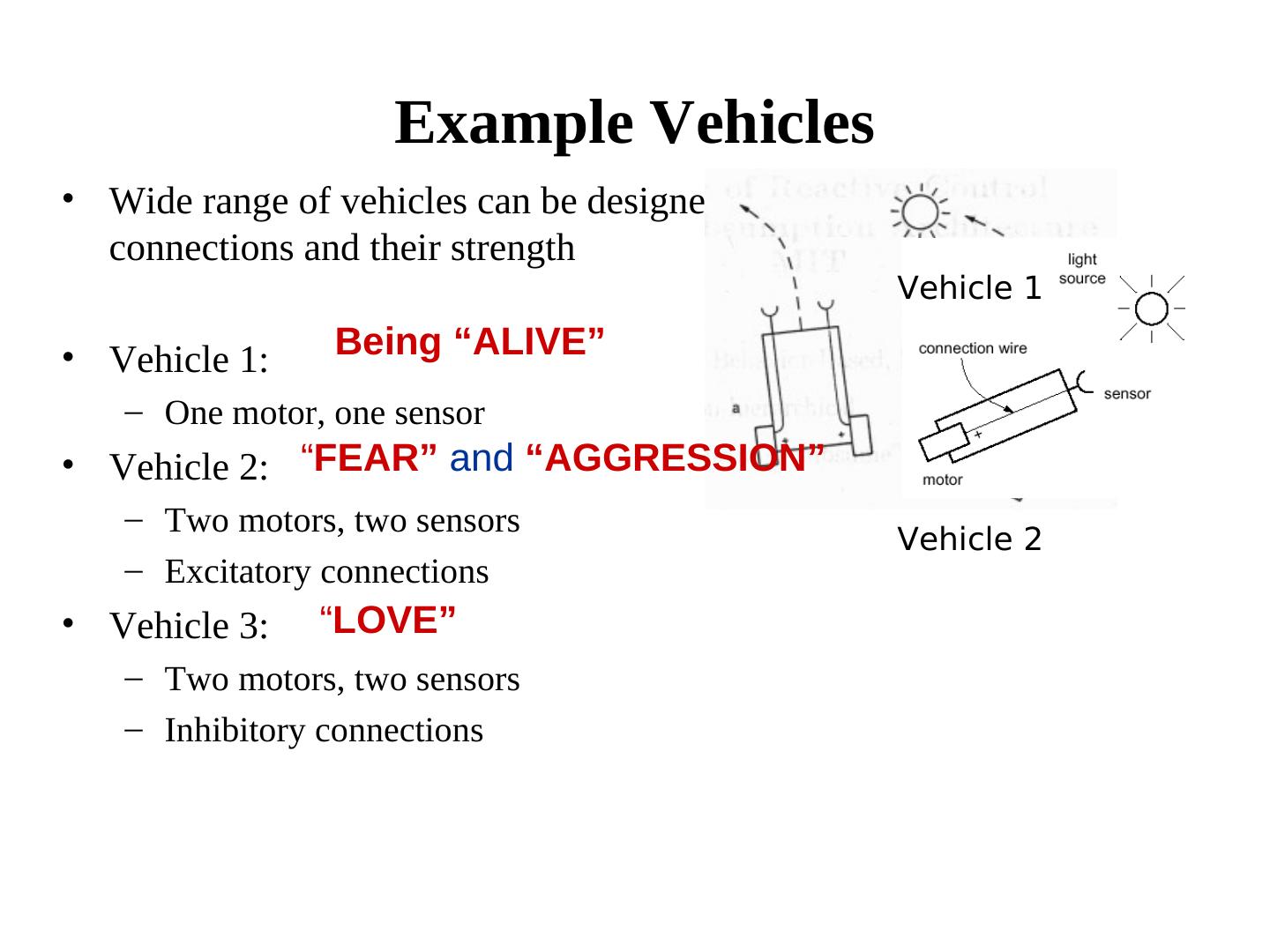
27 . Basic idea of Braitenberg Vehicles reminder and new concepts
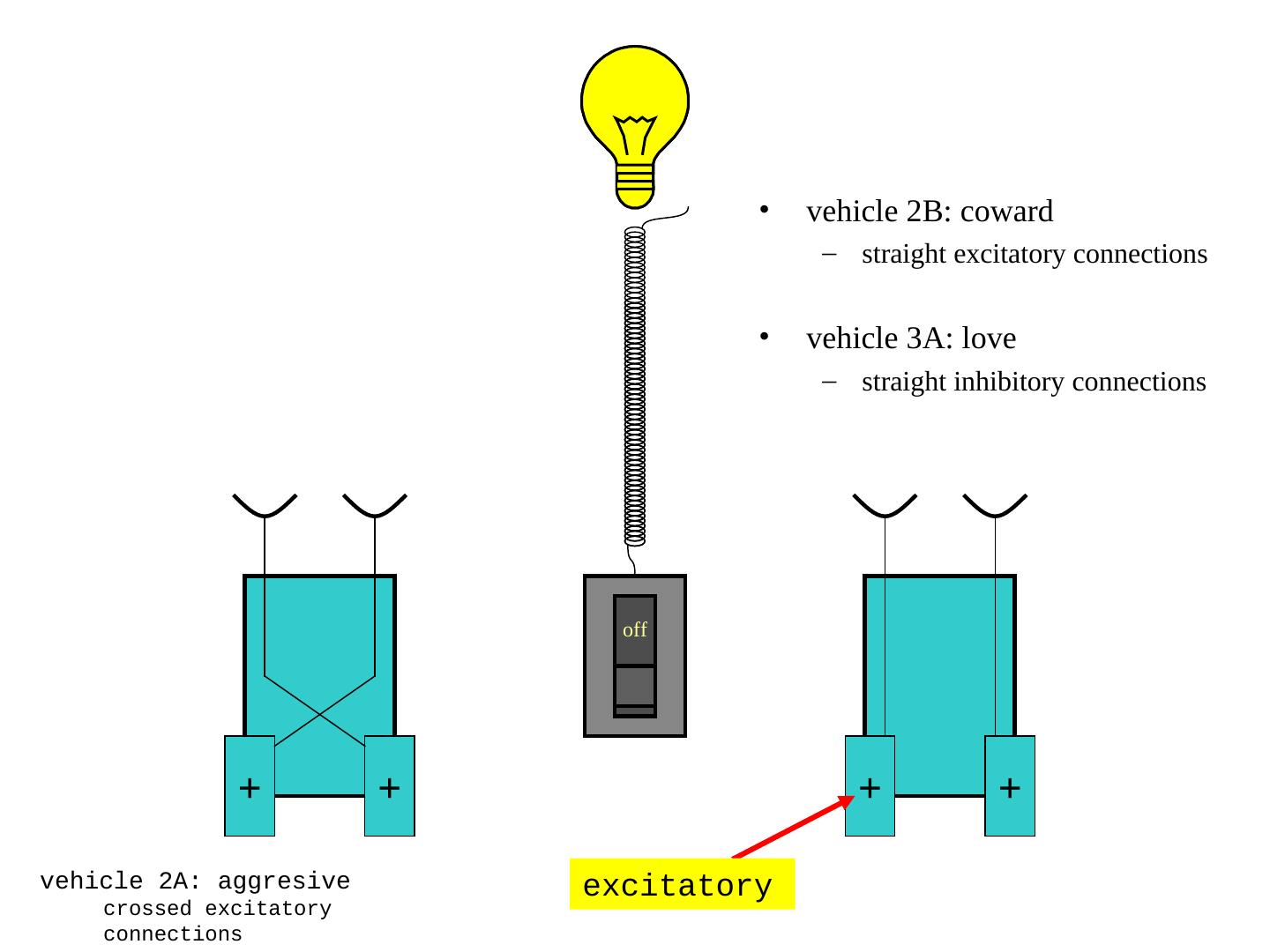
28 . Background • In Vehicles, Valentino Braitenberg describes a set of thought experiments in which increasingly complex vehicles are built from simple mechanical and electronic components. • Braitenberg uses these thought experiments to explore psychological ideas and the nature of intelligence. • Throughout the book, we see more intricate behaviors emerge from the interaction of simple component parts and simple behaviors
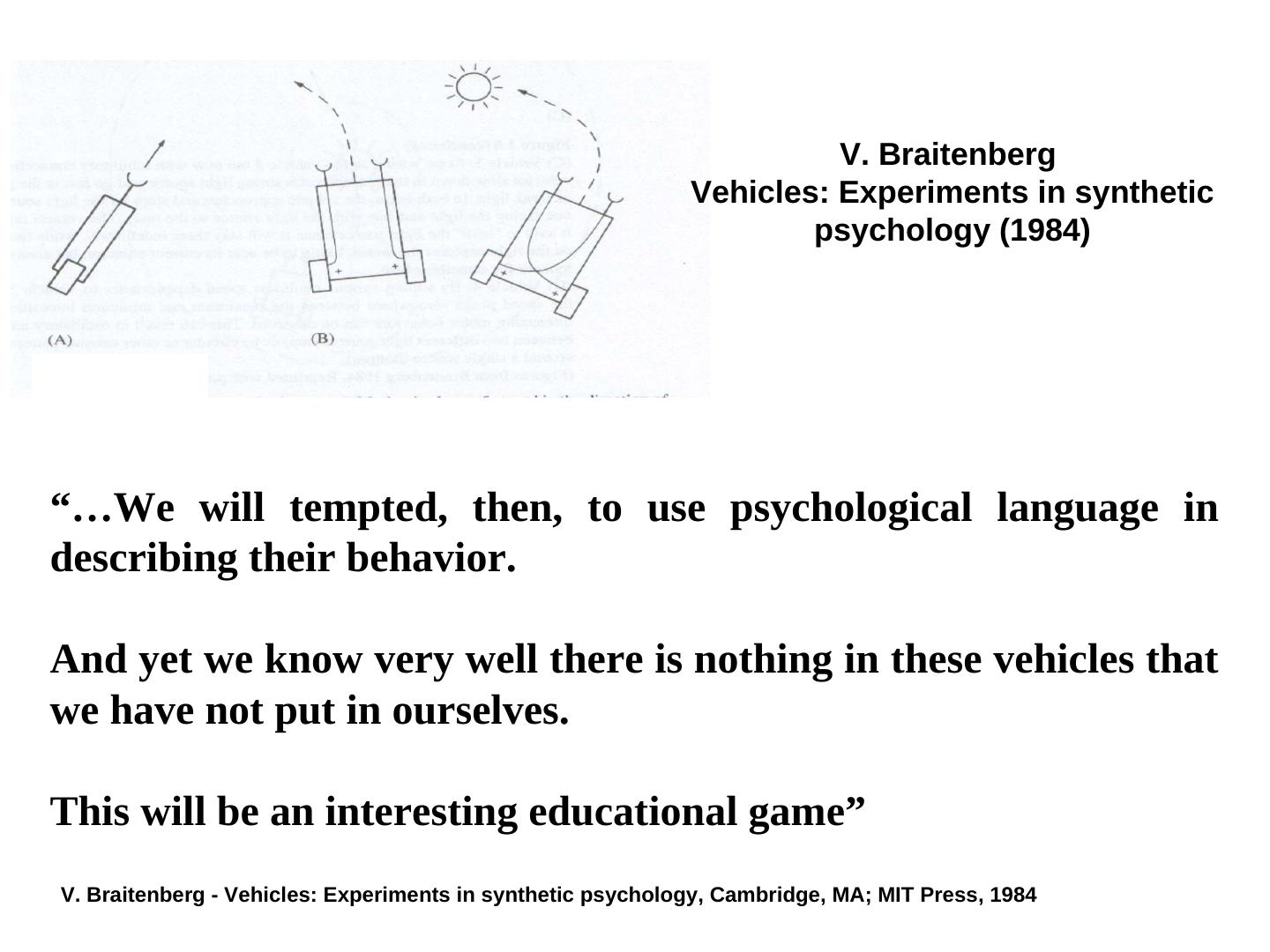
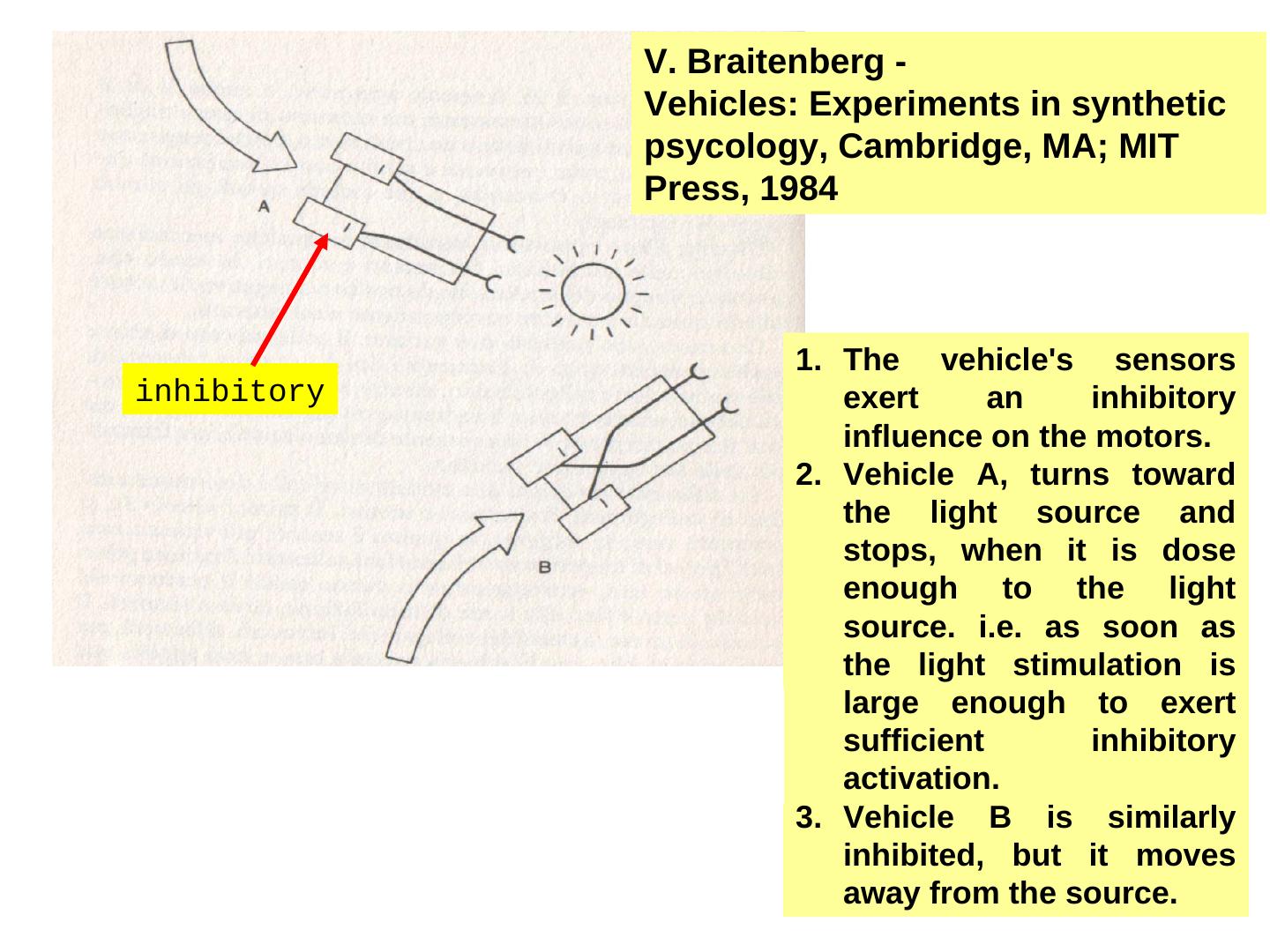
29 . V. Braitenberg Vehicles: Experiments in synthetic psychology (1984) “…We will tempted, then, to use psychological language in describing their behavior. And yet we know very well there is nothing in these vehicles that we have not put in ourselves. This will be an interesting educational game” V. Braitenberg - Vehicles: Experiments in synthetic psychology, Cambridge, MA; MIT Press, 1984
3秒后跳转登录页面
去登陆

