展开查看详情
1 .Building Line Following
and Food Following
Robots
�
2 . A simple robot
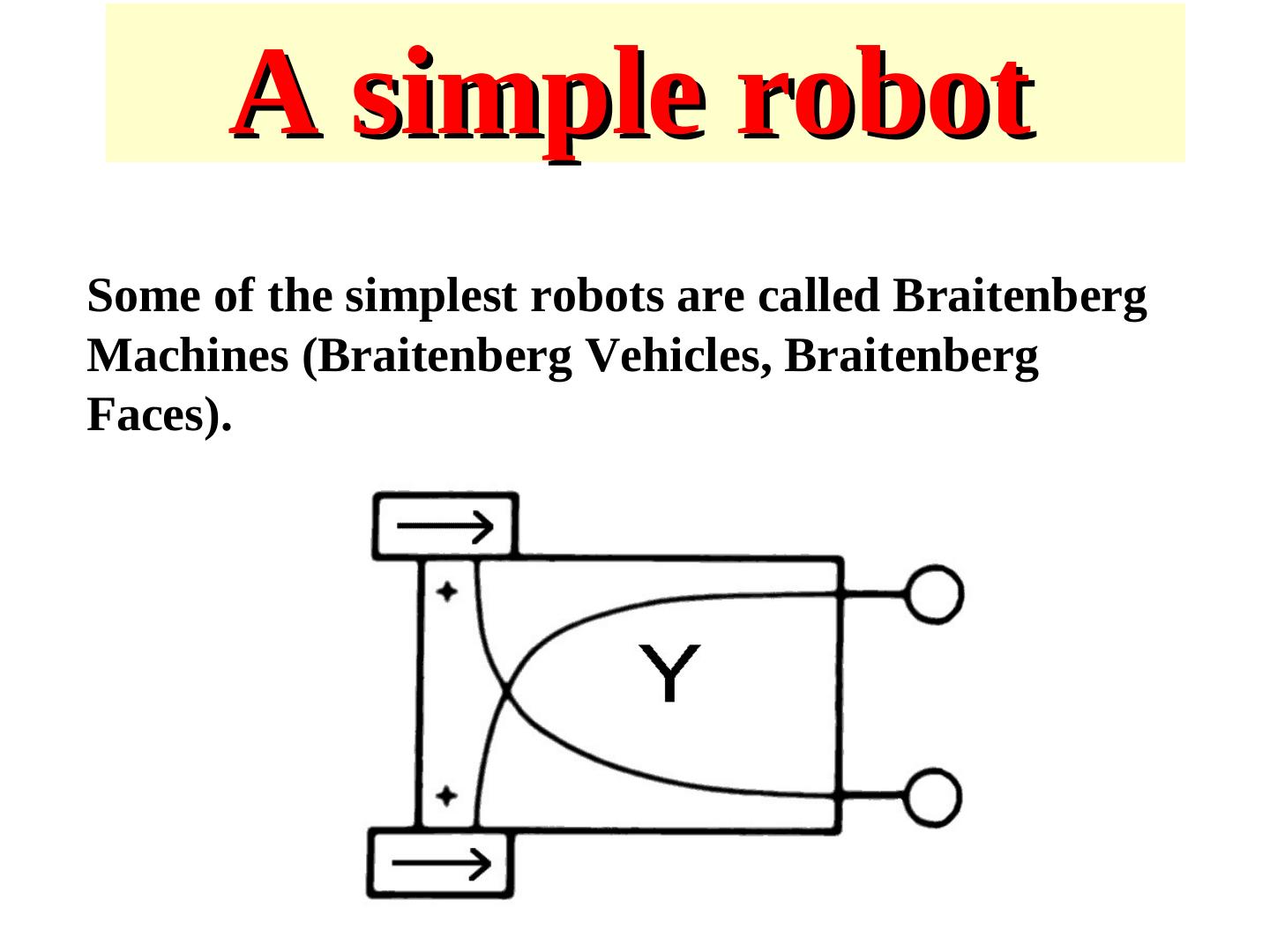
Some of the simplest robots are called Braitenberg
Machines (Braitenberg Vehicles, Braitenberg
Faces).
�
3 . Back to basics
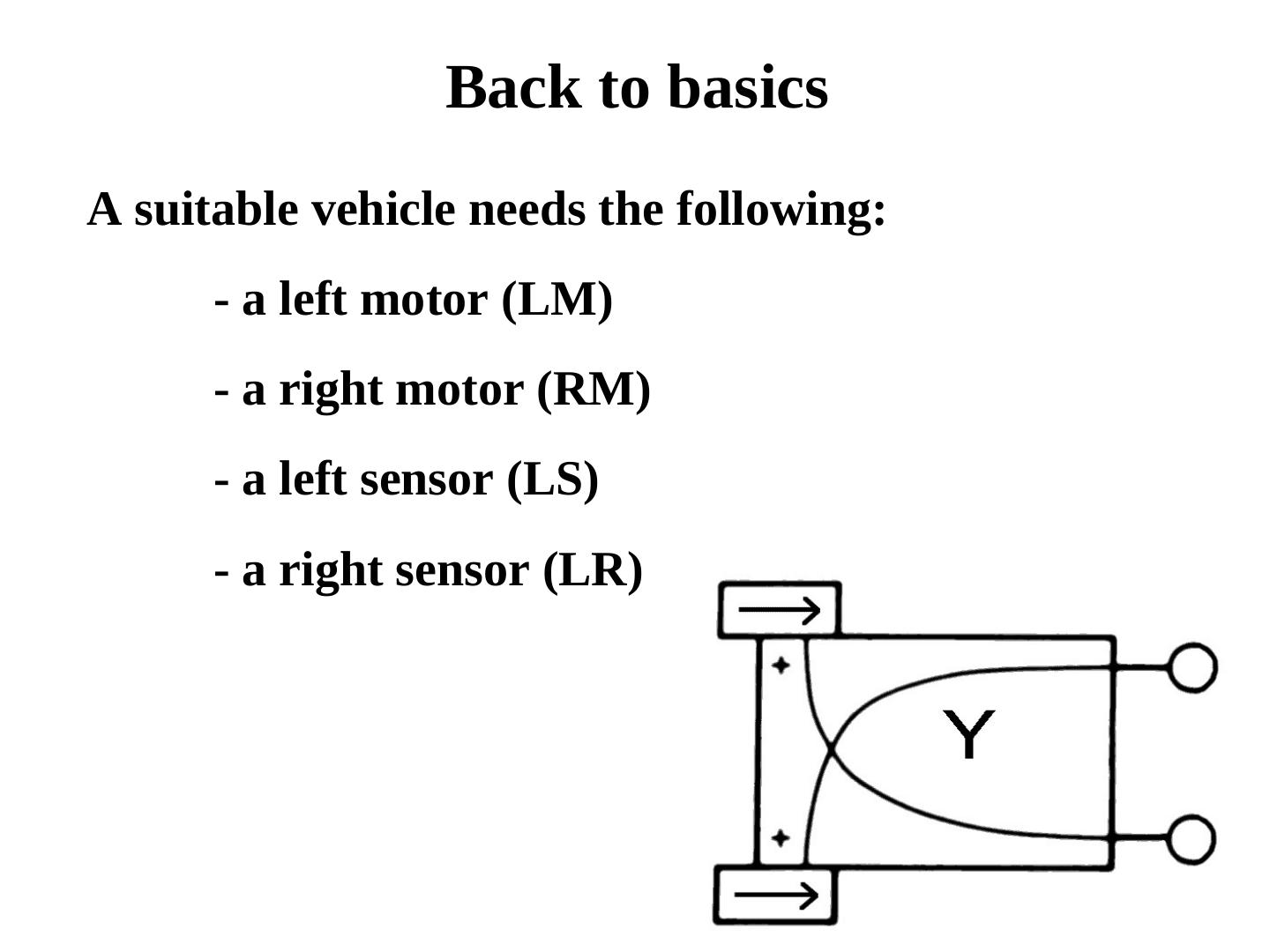
A suitable vehicle needs the following:
- a left motor (LM)
- a right motor (RM)
- a left sensor (LS)
- a right sensor (LR)
�
4 . Back to basics
A suitable program needs the following:
- a way of driving each motor as a function of
the reading on the sensor on the opposite side
�
5 . Back to basics
And the environment needs to ensure that the
change in sensory inputs produced by the
movement of the vehicle leads to some interesting
and obviously useful behaviour…
…with a simple performance measure so that
we can have a competition
�
6 . Constraints
All vehicles will have to be run in exactly the same
environment
The only suitable sensors are light sensors
�
8 . How termites work
Termites (and many other trail-following insects)
follow trails by sensing concentrations of special
chemicals (pheromones) using their antennae.
�
9 . How termites work
They use a technique called osmotropotaxis.
Roughly speaking,
1. their left legs go at a speed controlled by the
strength of the sensory input to their right
antenna,
2. their right legs go at a speed controlled by the
strength of the input to their left antenna…
In other words, they operate just like little
Braitenberg vehicles, and this enables them to
follow trails.
�
10 .Could we make visible trails on the ground,
and sense them with light sensors?
Yes…there are some trails on the floor of the
arena…
�
11 . But surely…
…if the trail is either black or white, won’t the
sensors only ever give maximum or minimum
readings?
No, because the sensor takes in reflected light from
an area, not a point.
If the area is wholly inside the black region, you’ll
get the minimum reading (with some noise)
And if it’s wholly inside the white region, you’ll get
the maximum reading (with some noise)
�
12 . But surely…
…if the trail is either black or white, won’t the
sensors only ever give maximum or minimum
readings?
No, because the sensor takes in reflected light from
an area, not a point.
If the area contains both black and white regions –
if the sensor is somewhere on the borderline – then
the reading will be somewhere in between the
minimum and maximum (again, with some noise)
�
13 . A basic strategy
If we space the sensors so that they are separated
by just less than the width of the trail, then when
both sensors read the minimum, we know we must
be on the trail…
…and so moving forwards is a good idea
�
14 . A basic strategy
If the sensor on the left reads the maximum, and
the sensor on the right reads the minimum, we
know we’re moving off the trail to the left…
…so turning right is a good idea
�
15 . A basic strategy
If the sensor on the right reads the maximum, and
the sensor on the left reads the minimum, we know
we’re moving off the trail to the right…
…so turning left is a good idea
�
16 . A basic strategy
And if both sensors read the maximum, you know
you’ve completely lost it
Of course, you could devise some cunning way to
get back on the trail (termites do)…
�
17 . But…
What if one or both sensors give a reading
somewhere in between?
The quick and dirty solution: keep on doing
whatever you were doing – it won’t last
The elegant solution: you can produce one if you
want, but it won’t make any difference…
�
18 . The performance measure
We can break this into two stages:
(1) How far down the trail you get
(2) If you make it to the end, how long it took
�
19 . First, catch your robot
1. You can make whatever you like, but since time
is so short I recommend that you use a version of
the Trusty robot
2. Described in Jonathan Knudsen’s “The
Unofficial Guide to Lego Mindstorms Robots”
�