












- 快召唤伙伴们来围观吧
- 微博 QQ QQ空间 贴吧
- 文档嵌入链接
- 复制
- 微信扫一扫分享
- 已成功复制到剪贴板
10 Line following - Braitenberg, robot examples
Review and Ideas for future Projects
-Projects with robots for teens. What we already discussed.
-Analysis of a Braitenberg robot with memory
-Projects with robots for teens
Advanced Line Following
-APPLICATIONS OF LINE FOLLOWING IDEAS
展开查看详情
1 . Review and Ideas for future Projects
2 . Projects with robots for teens. What we already discussed. 1. Line following robots 2. Y shaped lines for robots that drive to selected locations. 3. Robots following walls on corridors. 4. Algorithms for mazes: 1. Right Wall Following Algorithm (RWFA) 2. Left Wall Following Algorithm (LWFA) 3. Deterministic Switch from from RWFA and LWFA based on mapping the known part of maze to memory. 4. Variants of searching mazes to find an exit. 5. Deterministic and probabilistic combinational behavior based on input – output matrix and multiplication of matrix by vector. 6. Combinational and State Machine based Braitenberg Vehicles
3 . Analysis of a Braitenberg robot with S S 1 2 memory LOGIC S 1 J Q M M M 1 1 2 S K Q M 0= happy 2 2 1 =angry S1 S2 Q S1 J S2 K Q Q+ Q+ M1 M2 0 0 00 00 00 00 0 1 0 0 10 00 01 11 1 0 0 1 00 01 10 0 0 1 0 1 10 01 11 0 0 1 1 0 01 00 10 0 0 1 S1 1 S2 0 Q 11 Q+ 00 M1 11 M2 0 0 1 01 1 0 001 11 10 1 1 0 1 1 S1 1 S2 1 1Q Q+ 0 0 1 0 0 0 0 0 1
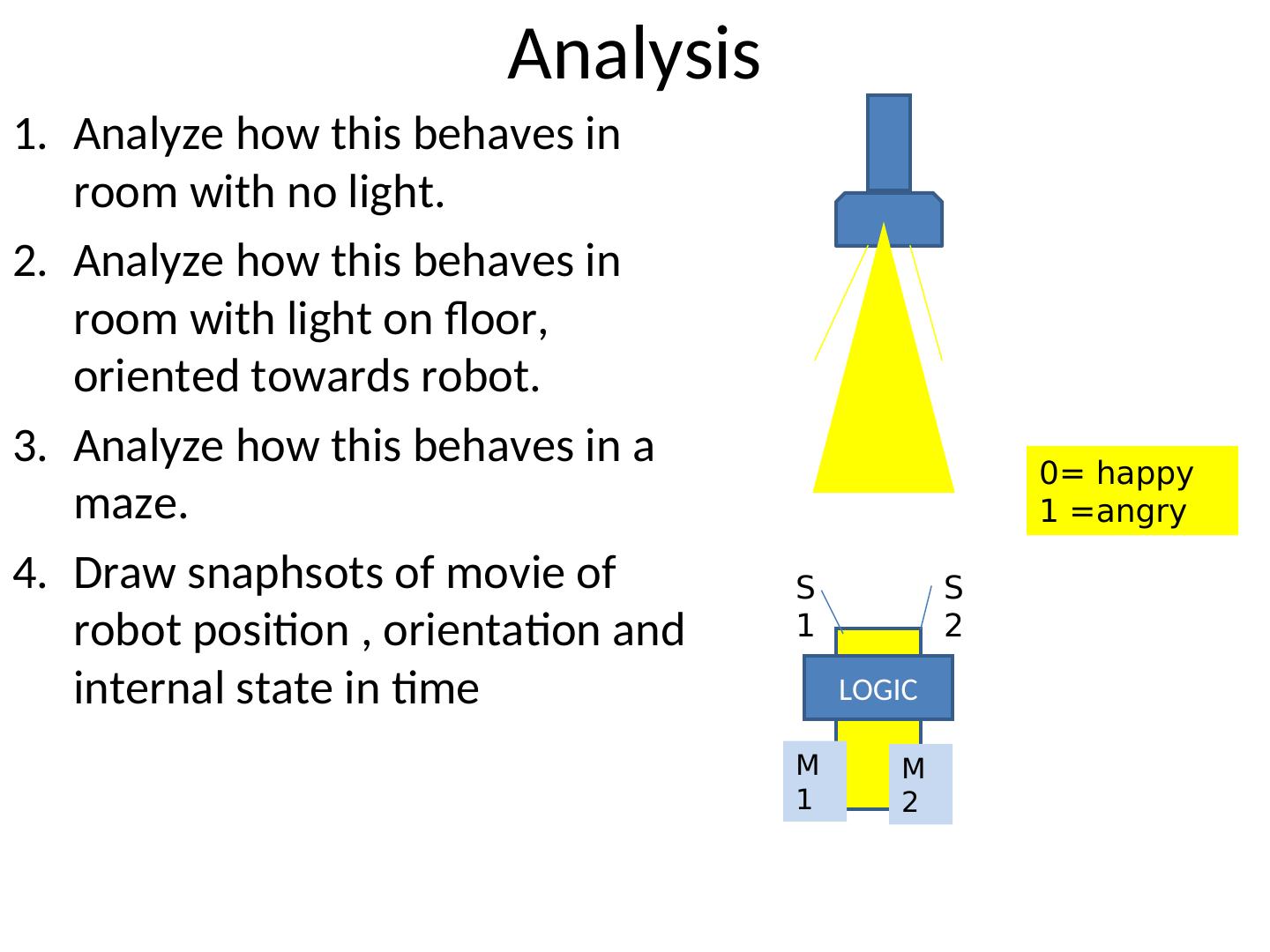
4 . Analysis 1. Analyze how this behaves in room with no light. 2. Analyze how this behaves in room with light on floor, oriented towards robot. 3. Analyze how this behaves in a 0= happy maze. 1 =angry 4. Draw snaphsots of movie of S S robot position , orientation and 1 2 internal state in time LOGIC M M 1 2
5 .Maze exit
6 .Wall is on the left Robots marks his motion for Left Wall algorithm in blue exit
7 .Robots maps its position in memory and now is back in the same point Robots marks his motion for Left Wall algorithm in blue exit
8 . Robot starts left wall Robot moves to other following algorithm (wall at wall left) Robots marks his motion for Left Wall algorithm in crosses X X exit
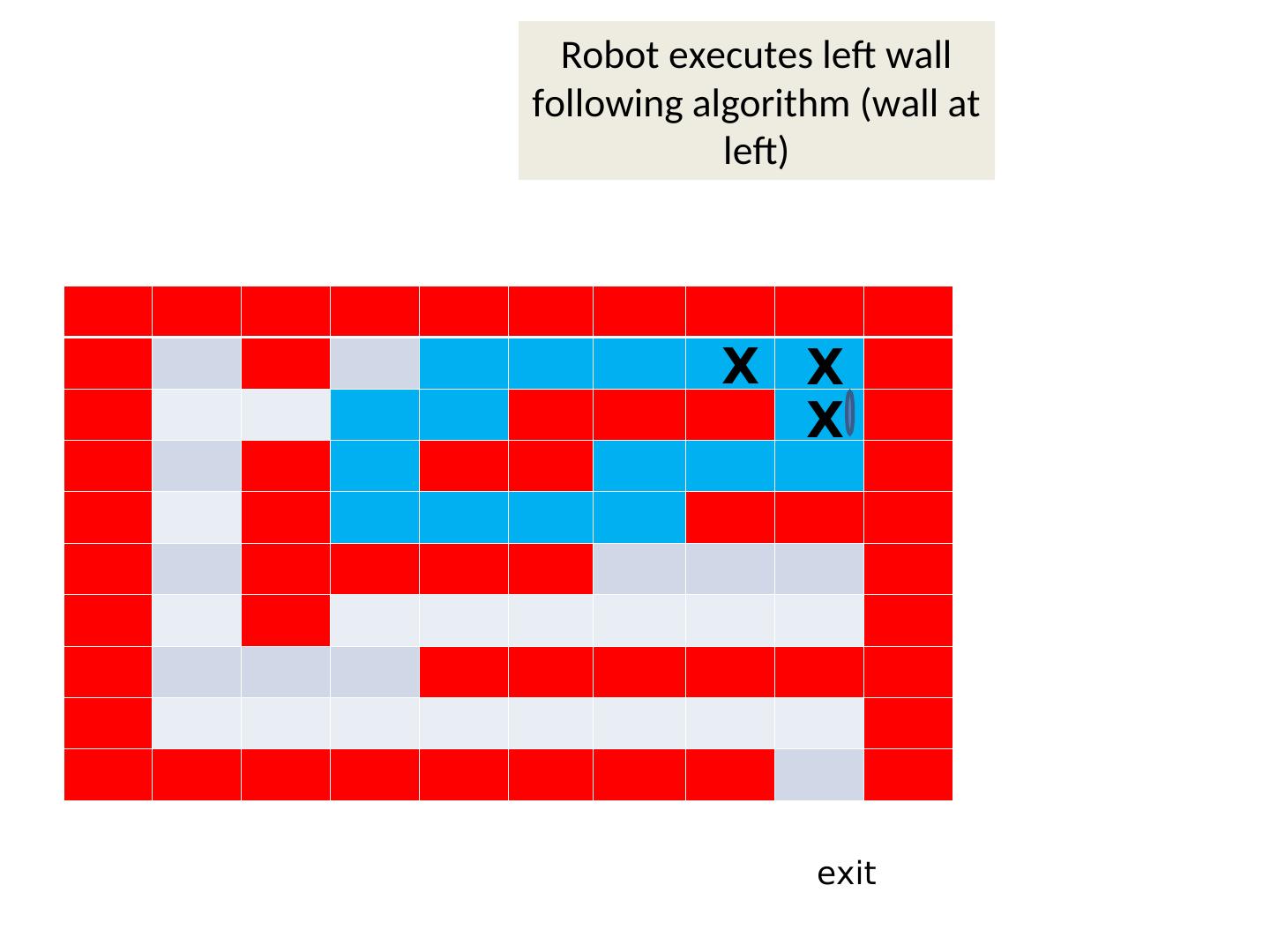
9 . Robot executes left wall following algorithm (wall at left) X X exit
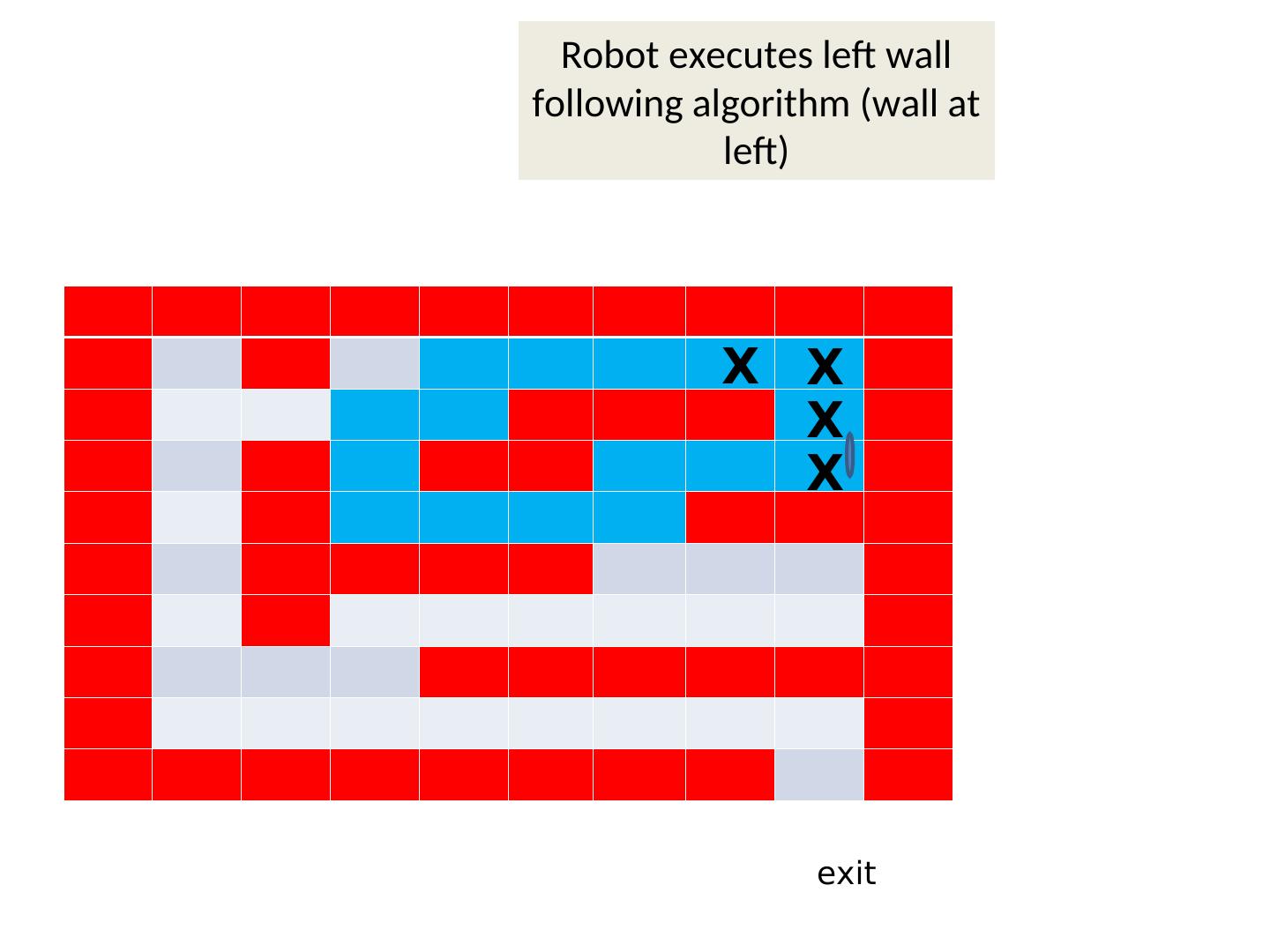
10 . Robot executes left wall following algorithm (wall at left) X X X exit
11 . Robot executes left wall following algorithm (wall at left) X X X X exit
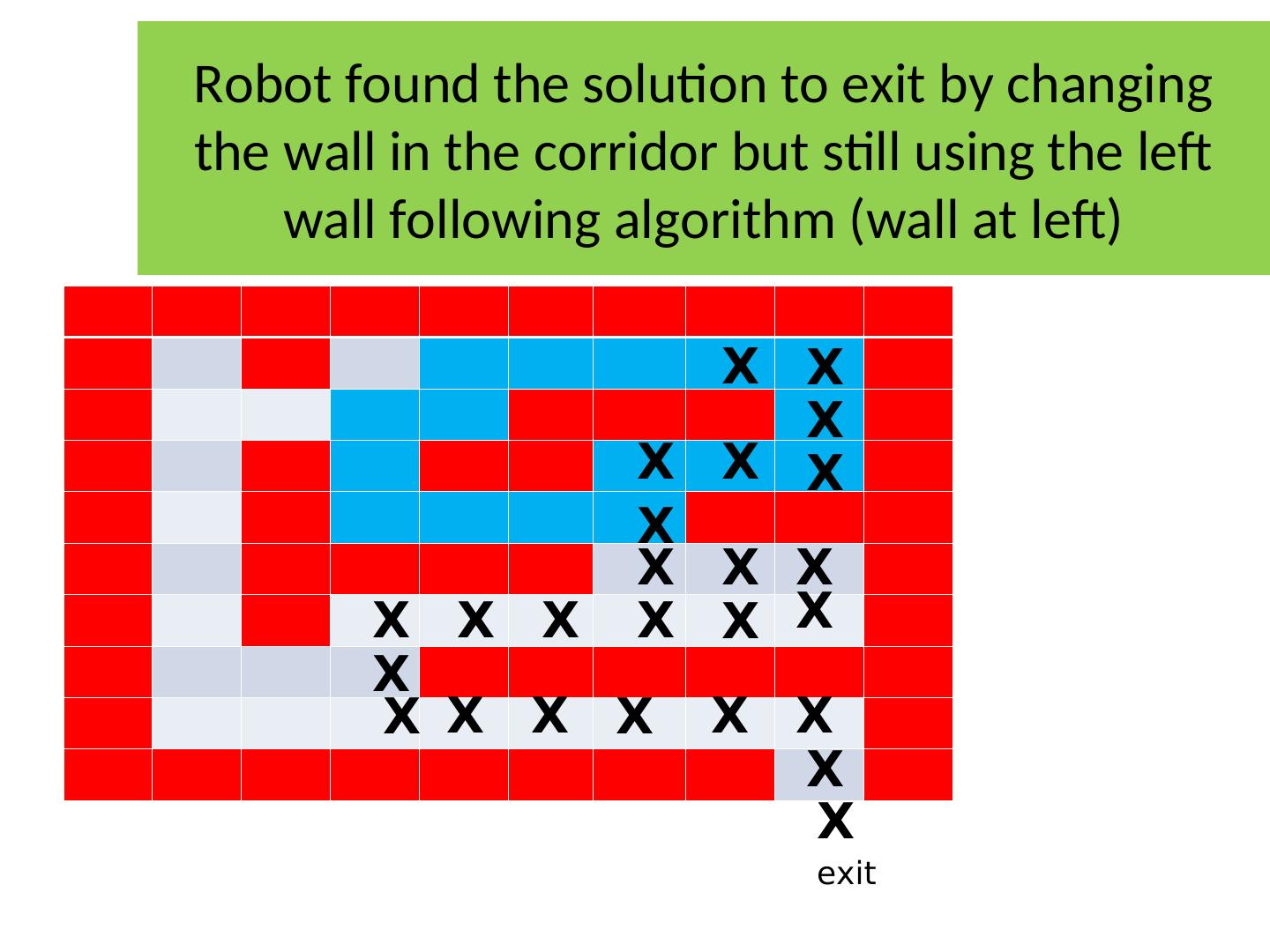
12 .Robot found the solution to exit by changing the wall in the corridor but still using the left wall following algorithm (wall at left) X X X X X X X X X X X X X X X X X X X X X X X X X exit
13 . Projects with robots for teens 1. Robot finding cans and bringing them to safe place. 2. Robot attacking or escaping other robots. 3. Robots boxing. 4. Robots shooting one another. 5. Robots fencing. 6. Repeated Prisoner Dilemma for robots. 7. Repeated Chicken for robots. 8. Subsumption Architecture 9. Maze Searching 10. Genetic Algorithm 11. Tree search
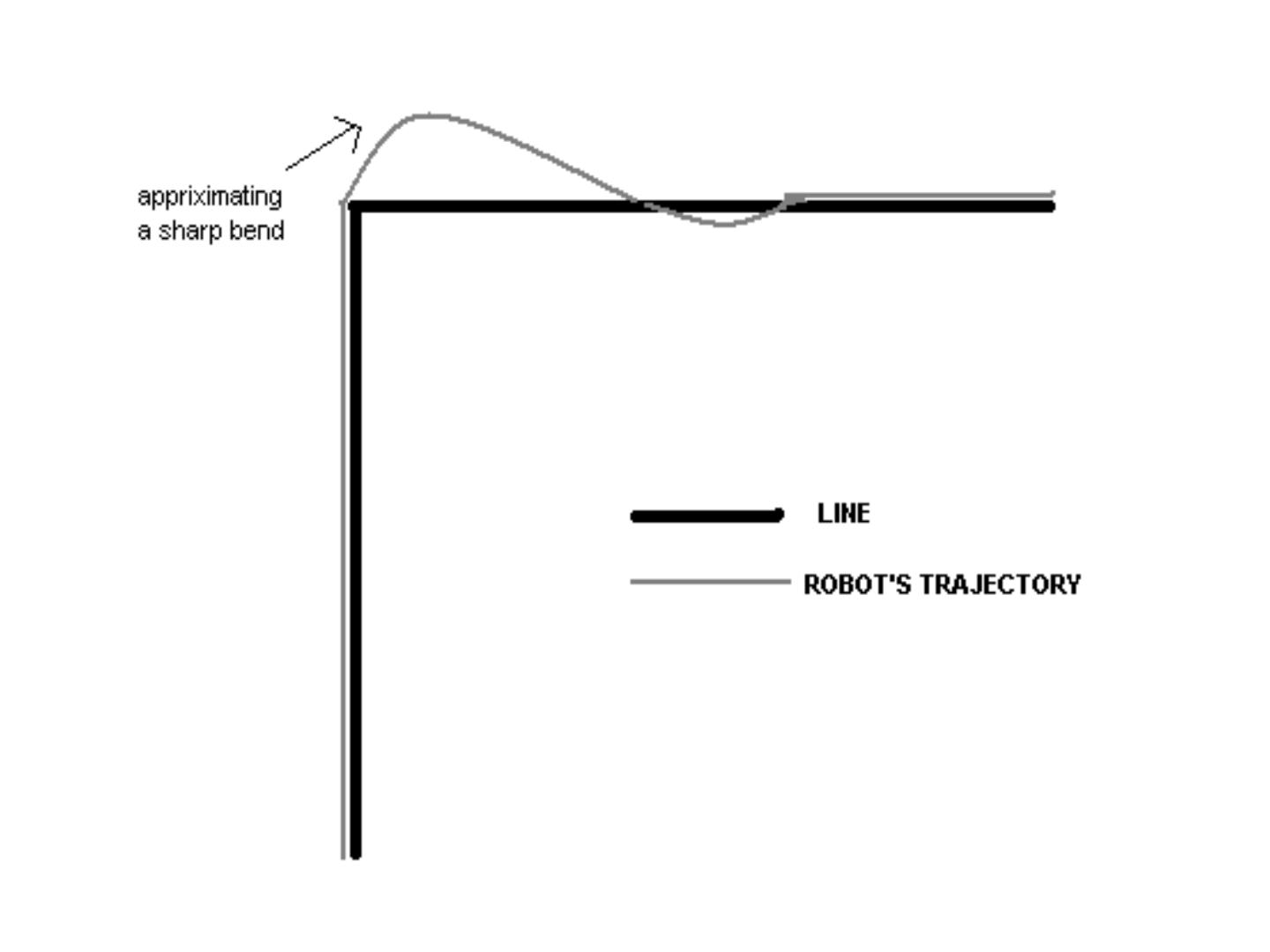
14 .Advanced Line Following
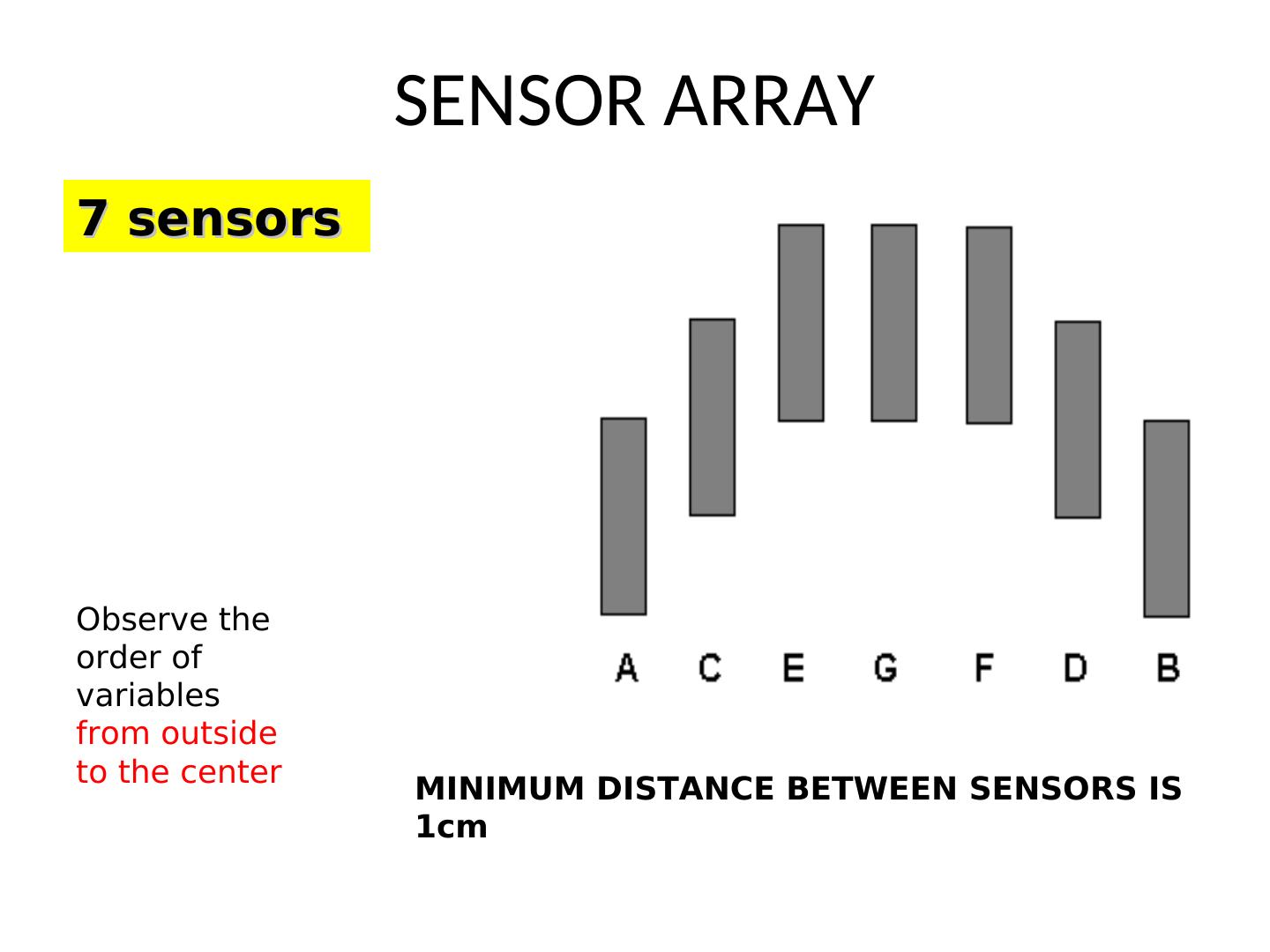
15 . SENSOR ARRAY 7 sensors Observe the order of variables from outside to the center MINIMUM DISTANCE BETWEEN SENSORS IS 1cm
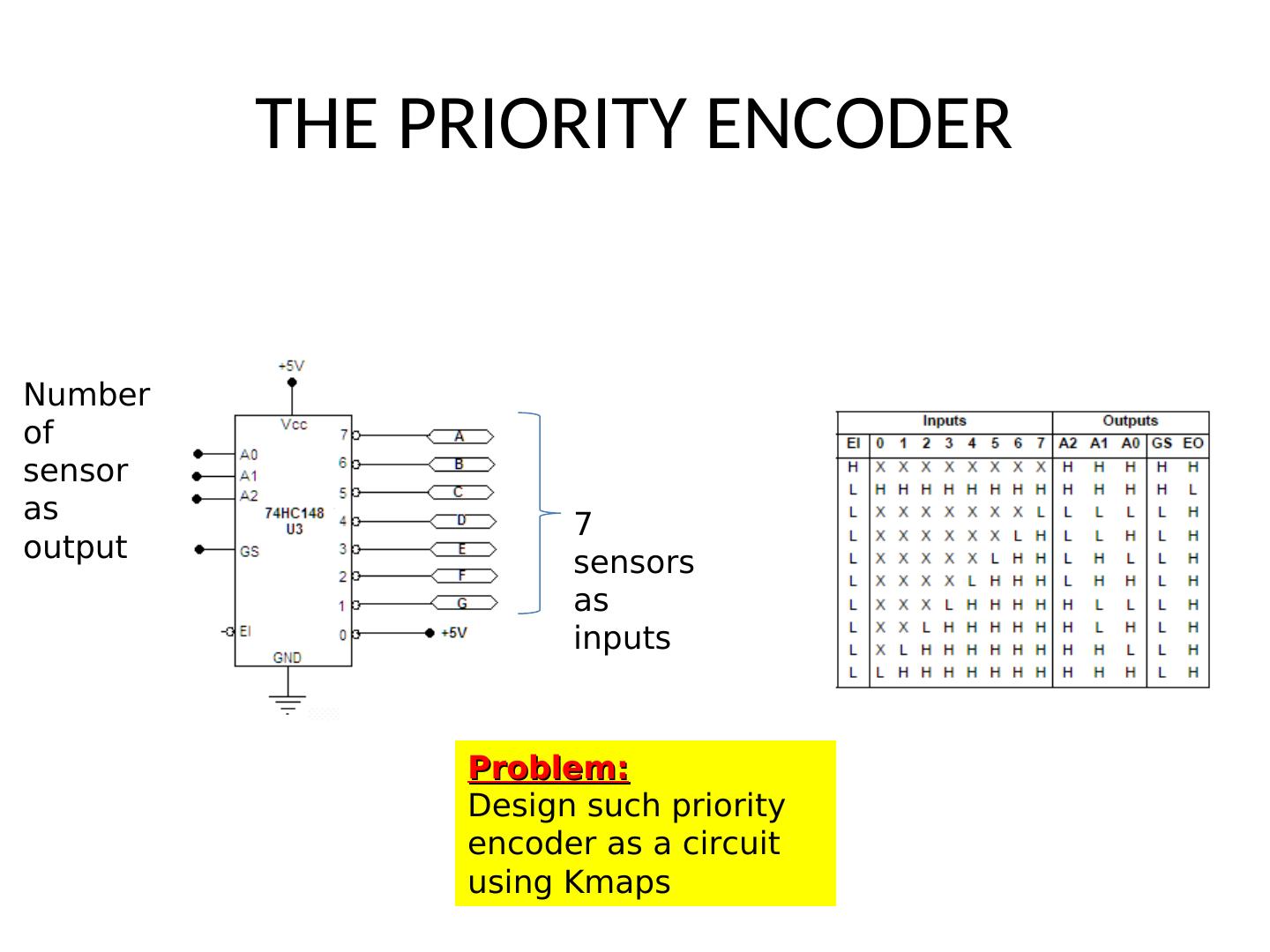
16 . THE PRIORITY ENCODER Number of sensor as 7 output sensors as inputs Problem: Design such priority encoder as a circuit using Kmaps
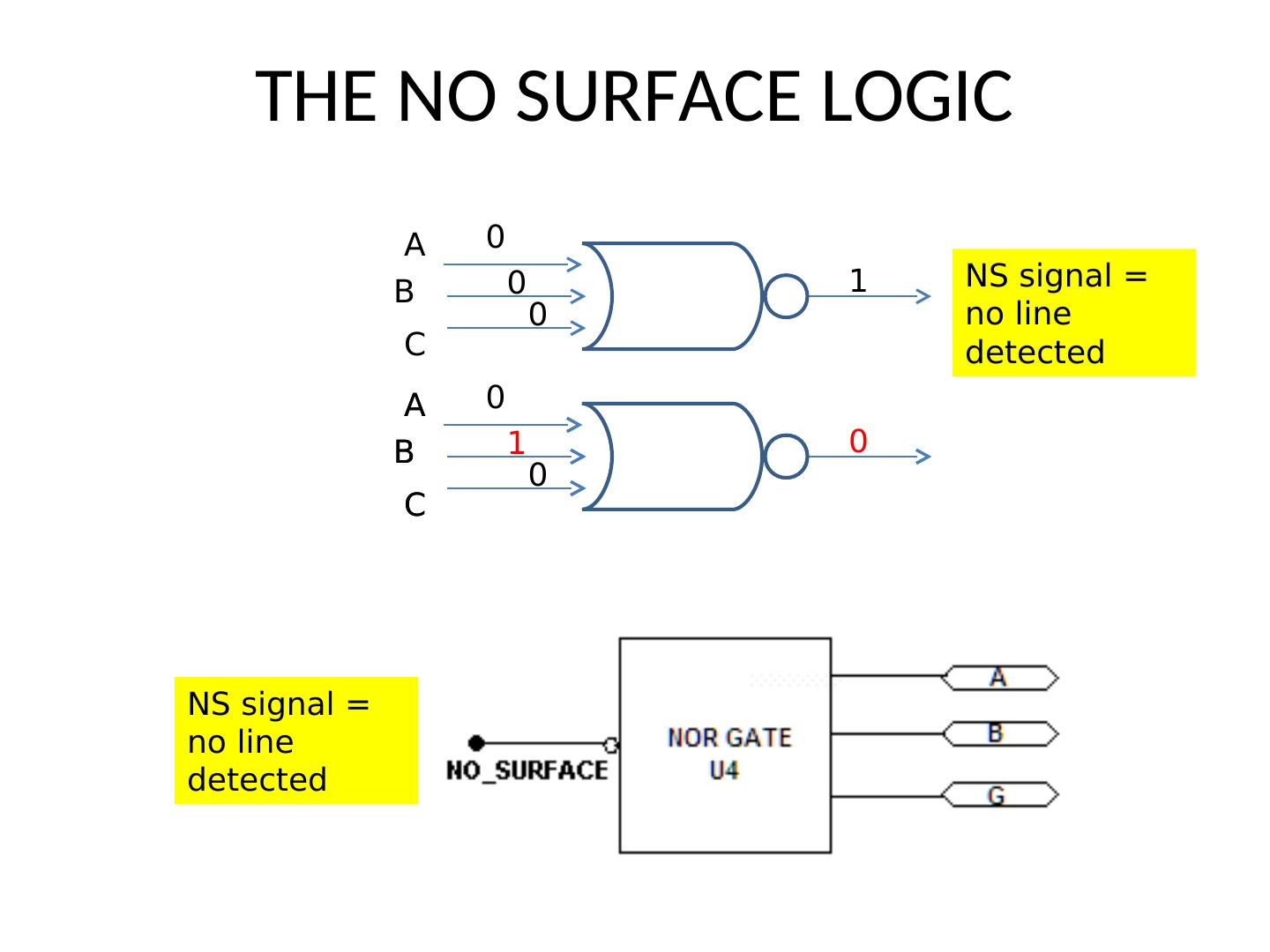
17 . THE NO SURFACE LOGIC A 0 B 0 1 NS signal = 0 no line C detected A 0 B 1 0 0 C NS signal = no line detected
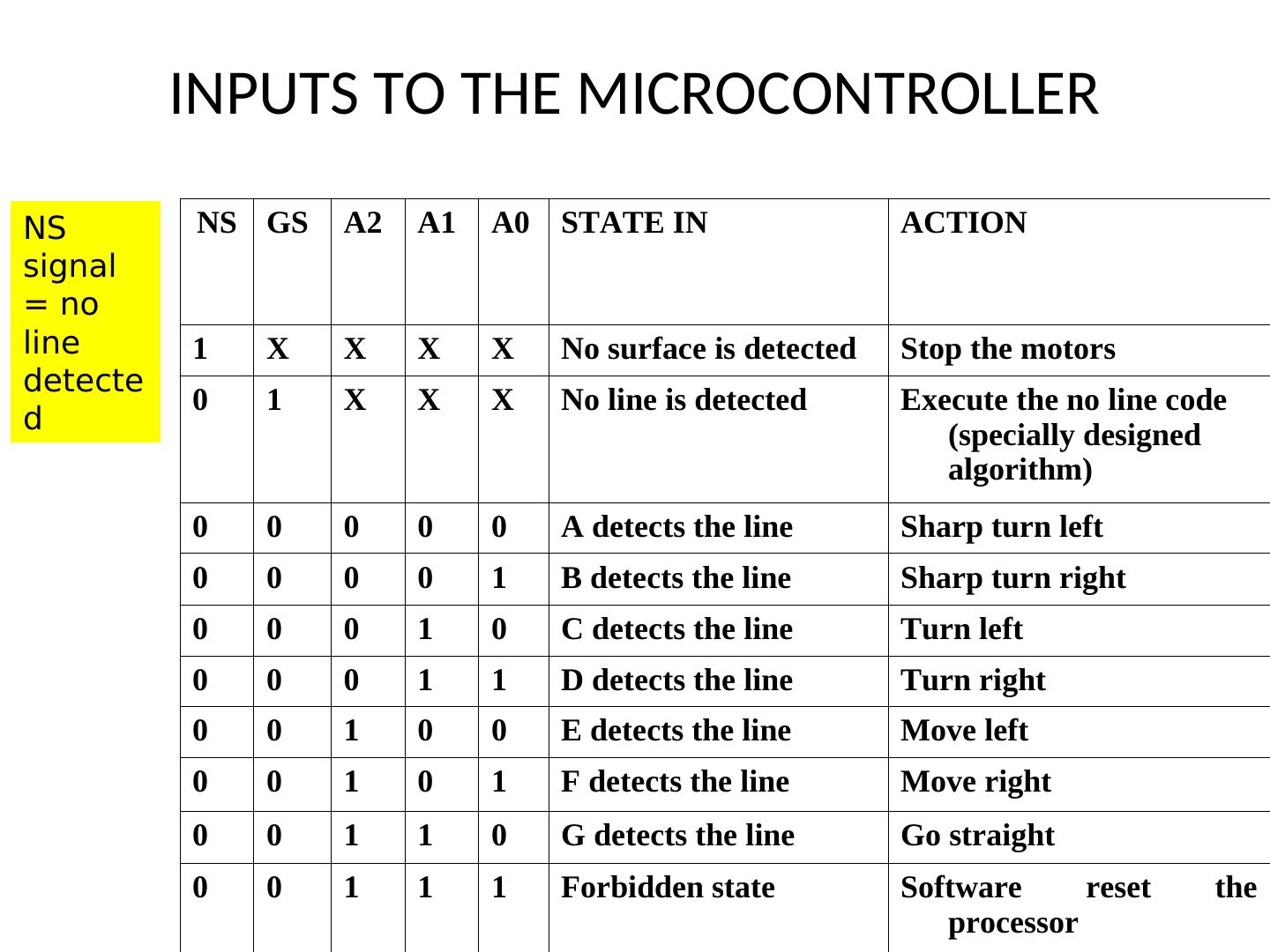
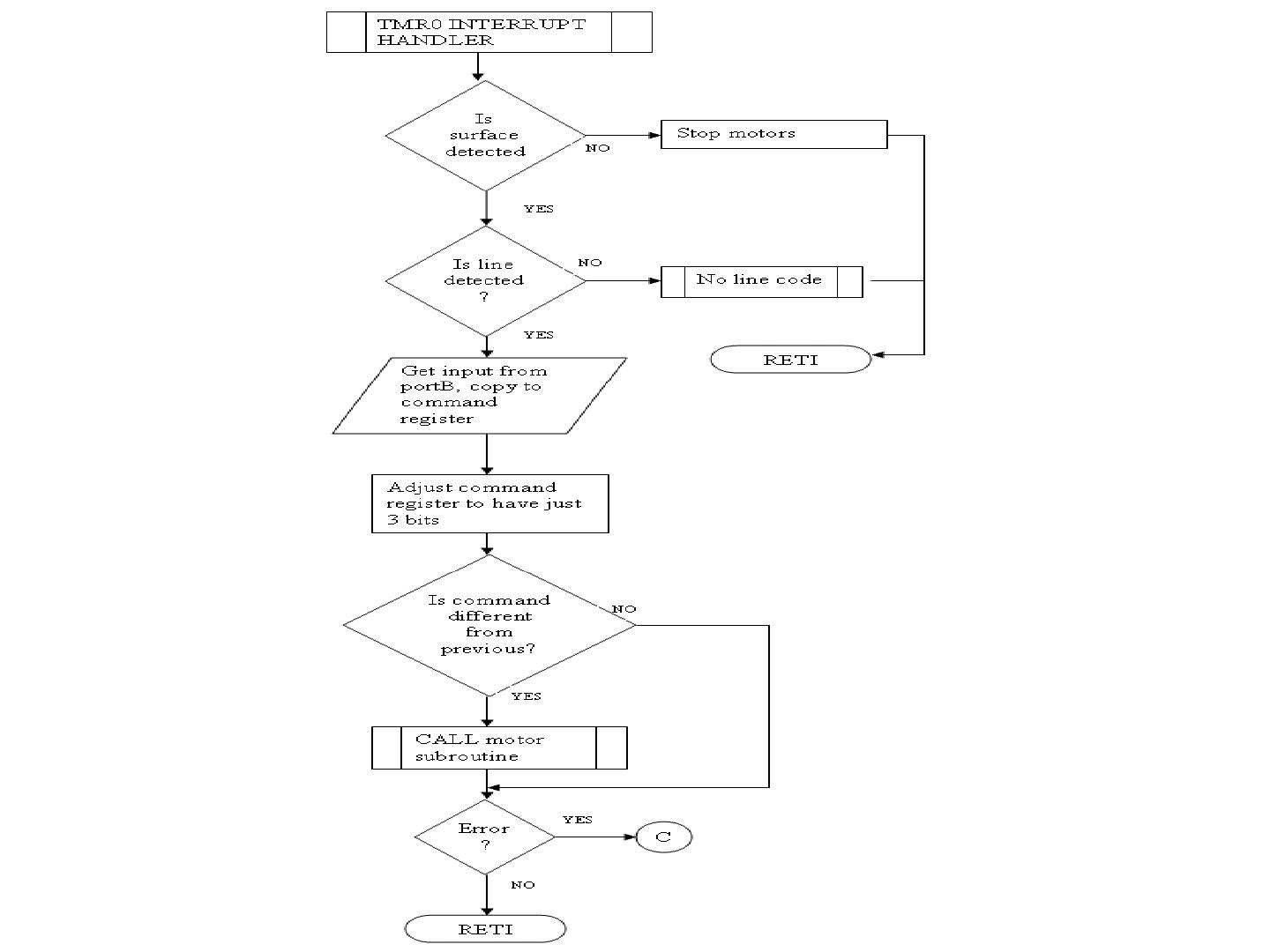
18 . INPUTS TO THE MICROCONTROLLER NS NS GS A2 A1 A0 STATE IN ACTION signal = no line 1 X X X X No surface is detected Stop the motors detecte 0 1 X X X No line is detected Execute the no line code d (specially designed algorithm) 0 0 0 0 0 A detects the line Sharp turn left 0 0 0 0 1 B detects the line Sharp turn right 0 0 0 1 0 C detects the line Turn left 0 0 0 1 1 D detects the line Turn right 0 0 1 0 0 E detects the line Move left 0 0 1 0 1 F detects the line Move right 0 0 1 1 0 G detects the line Go straight 0 0 1 1 1 Forbidden state Software reset the processor
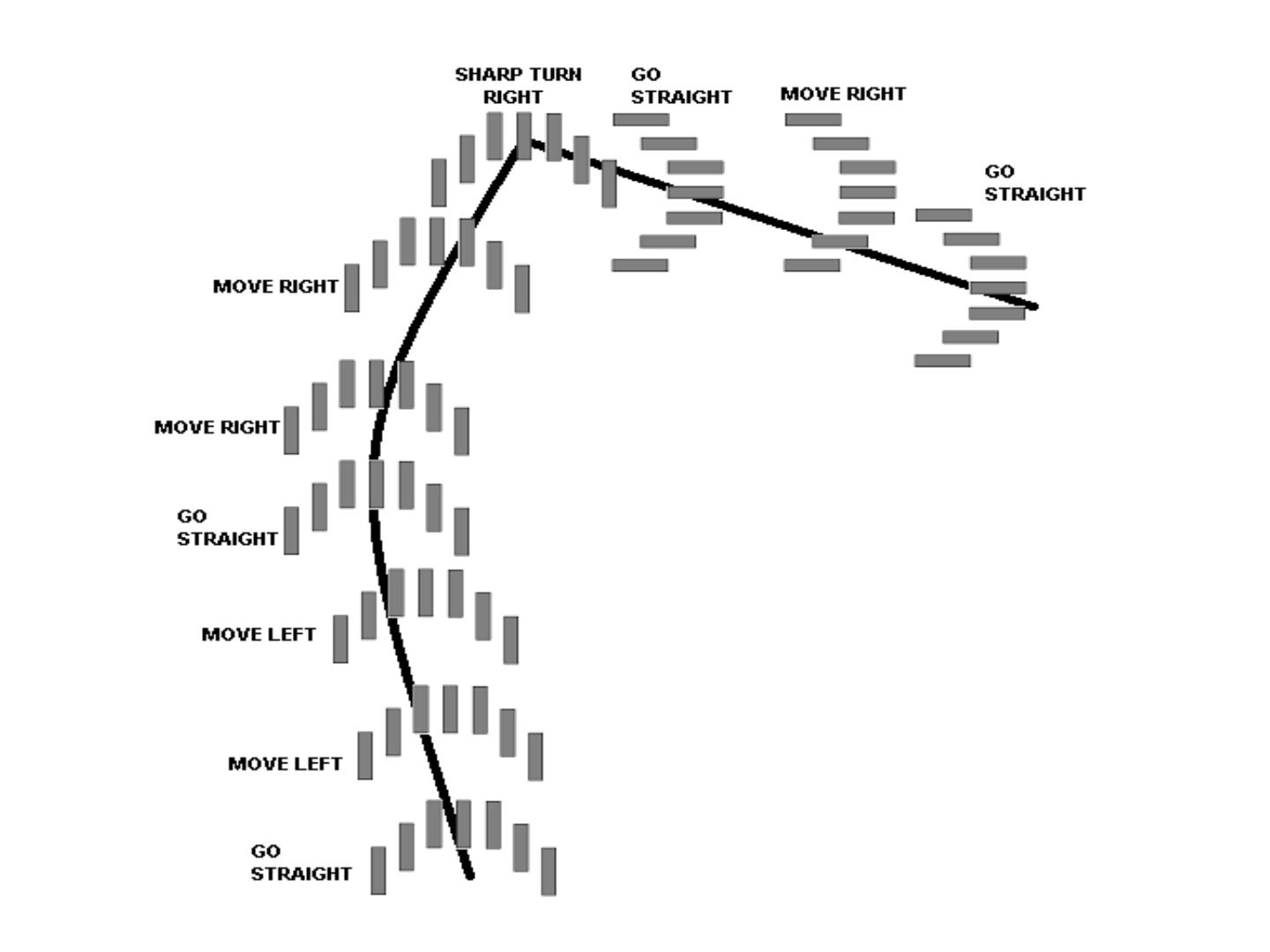
19 .How this algorithm based on sensors works?
20 .
21 .LINE FIND MODE
22 .
23 . Generalizations • Wall following • Vision based Wall following • Labyrinth problems • Can collecting tasks
24 .FLOW CHART
25 .
26 .
27 . RESULT AND CONCLUSION 1. The robot follows a line as demonstrated. 2. It effectively overcomes problems such as “barren land syndrome” and line breaks. 3. The hardware and software works as designed.
28 . APPLICATIONS OF LINE FOLLOWING IDEAS 1. Industrial automated equipment carriers 2. Automated cars. 3. Tour guides in museums and other similar applications. 4. Second wave robotic reconnaissance operations.
29 . LIMITATIONS 1. Choice of line is made in the hardware abstraction and cannot be changed by software. 2. Calibration is difficult, and it is not easy to set a perfect value. 3. The steering mechanism is not easily implemented in huge vehicles and impossible for non-electric vehicles (petrol powered). 4. Few curves are not made efficiently, and must be avoided.
3秒后跳转登录页面
去登陆

