





























- 快召唤伙伴们来围观吧
- 微博 QQ QQ空间 贴吧
- 文档嵌入链接
- 复制
- 微信扫一扫分享
- 已成功复制到剪贴板
09 Robot Metaphors + models + dialog
Robot Metaphors and Models
Braitenberg Vehicles and Quantum Automata Robots
Our Base Model and Designs
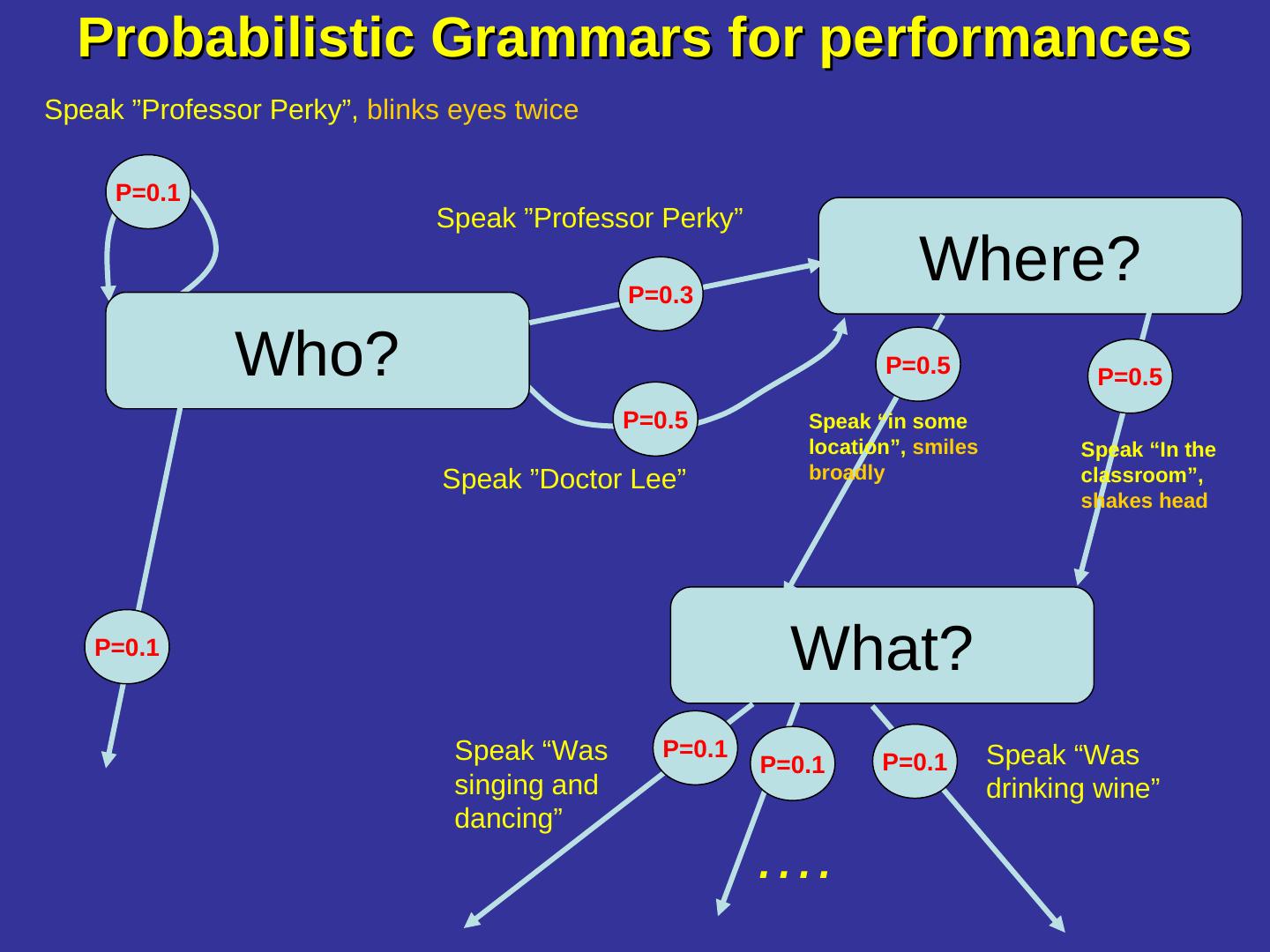
Probabilistic and Finite State Machines
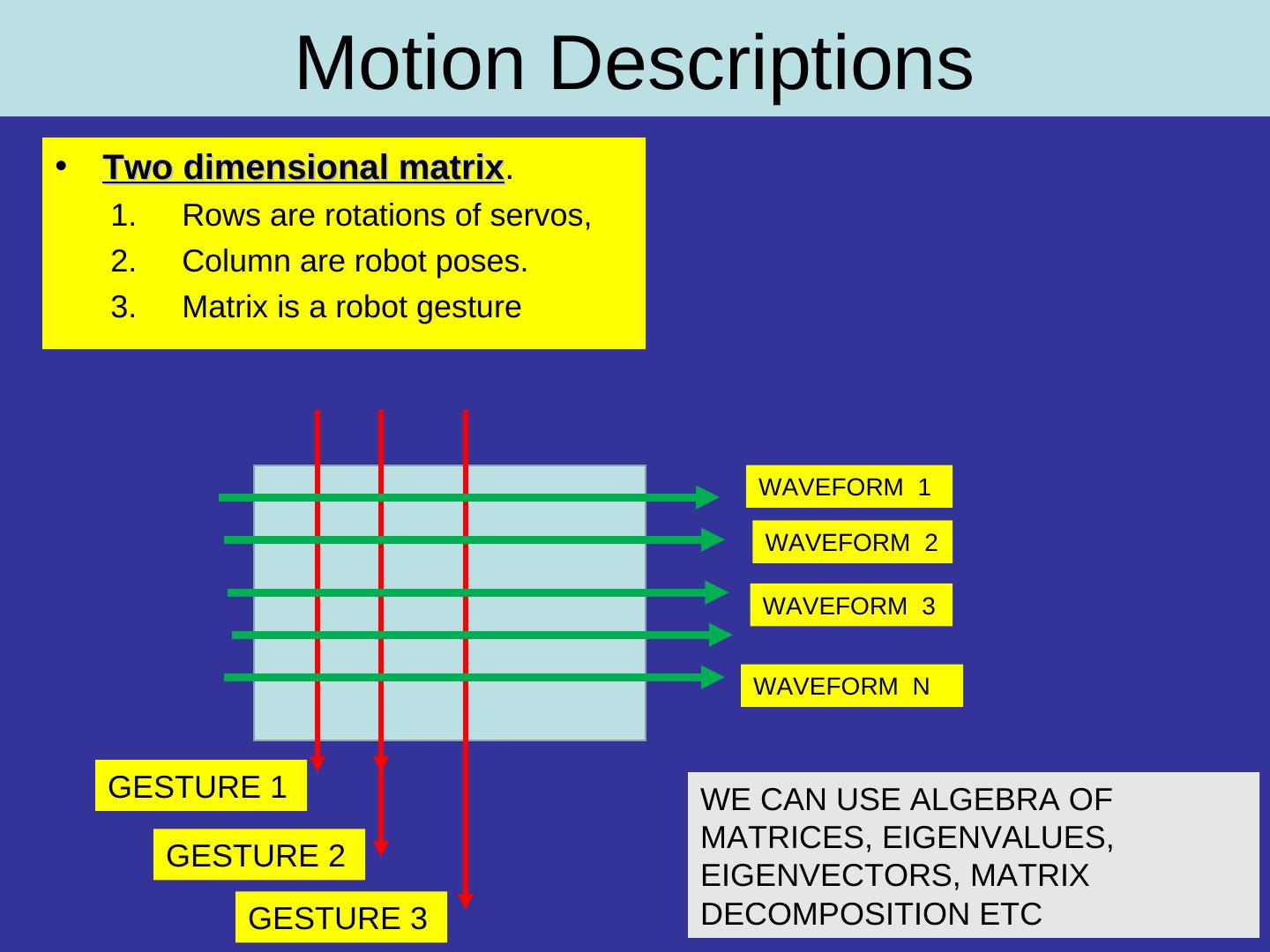
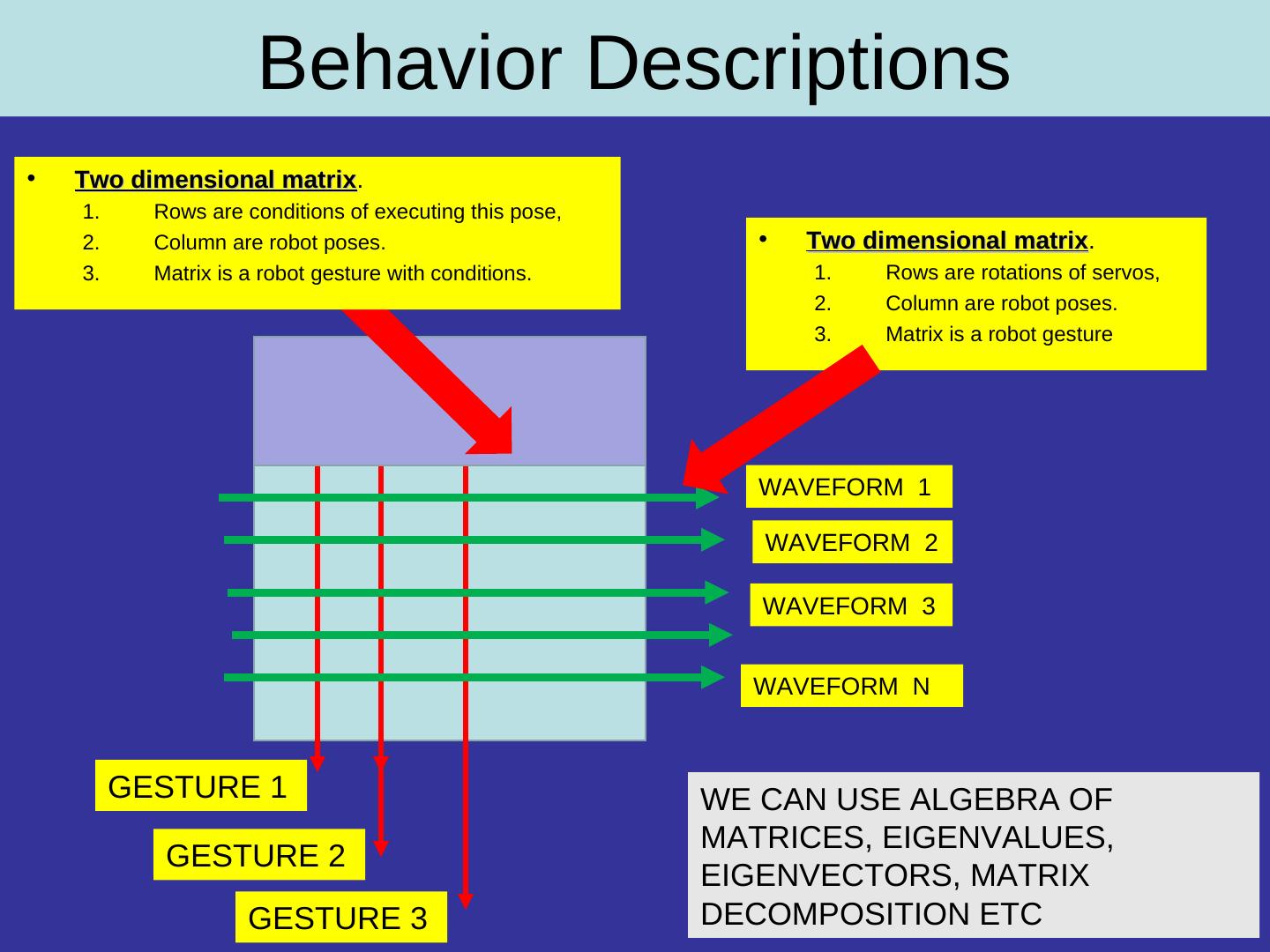
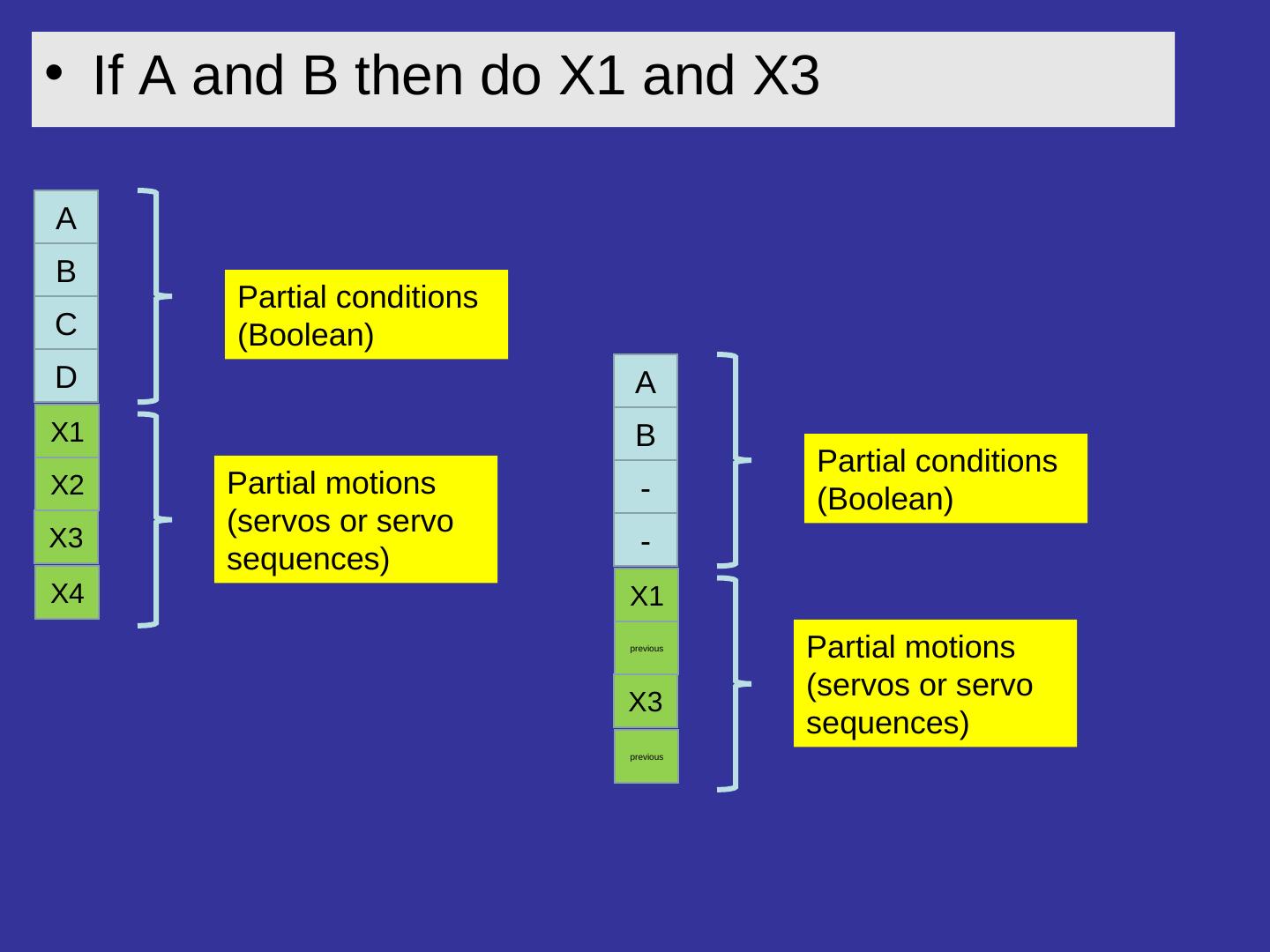
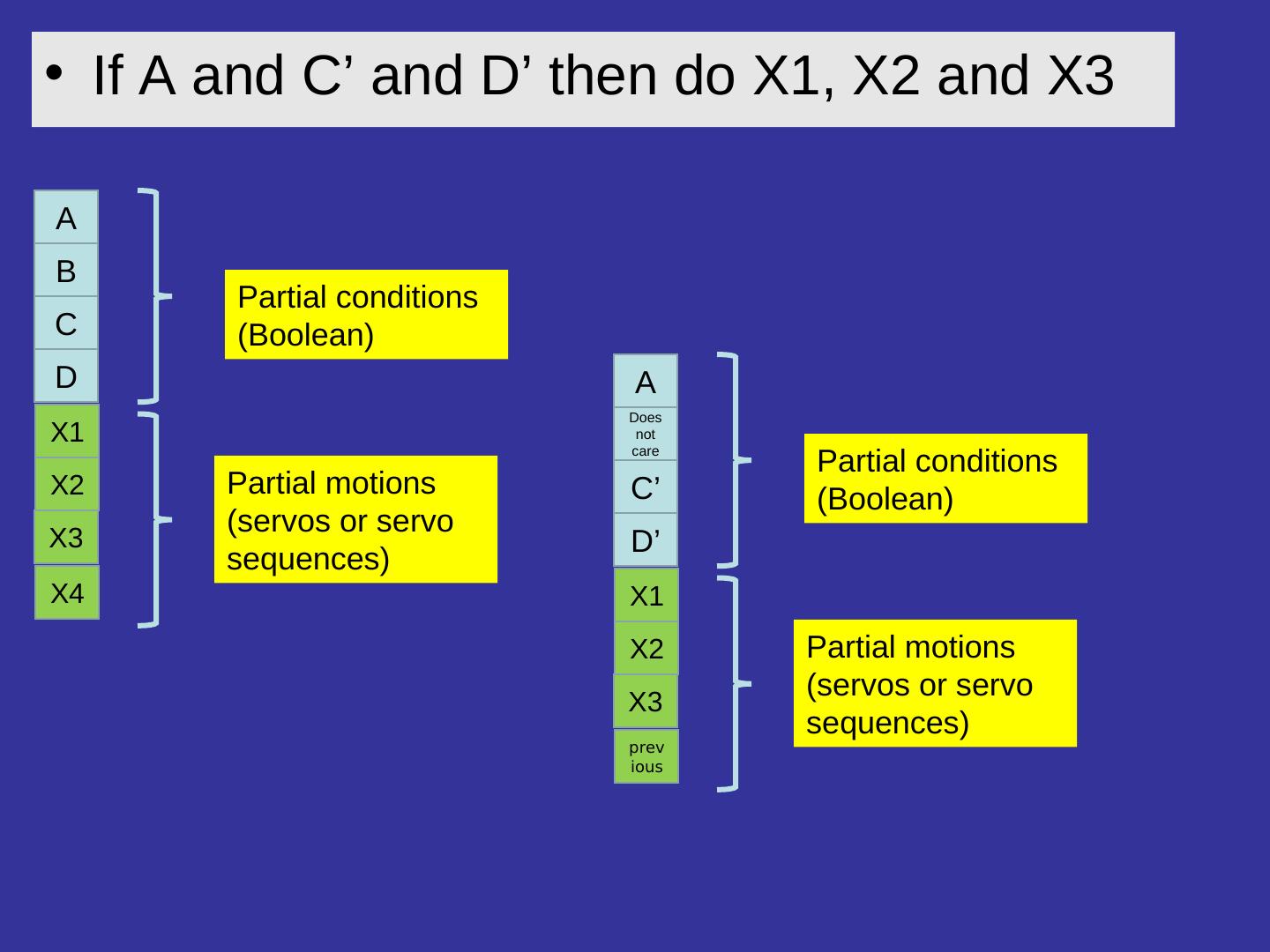
Descriptions of Motions and Behaviors
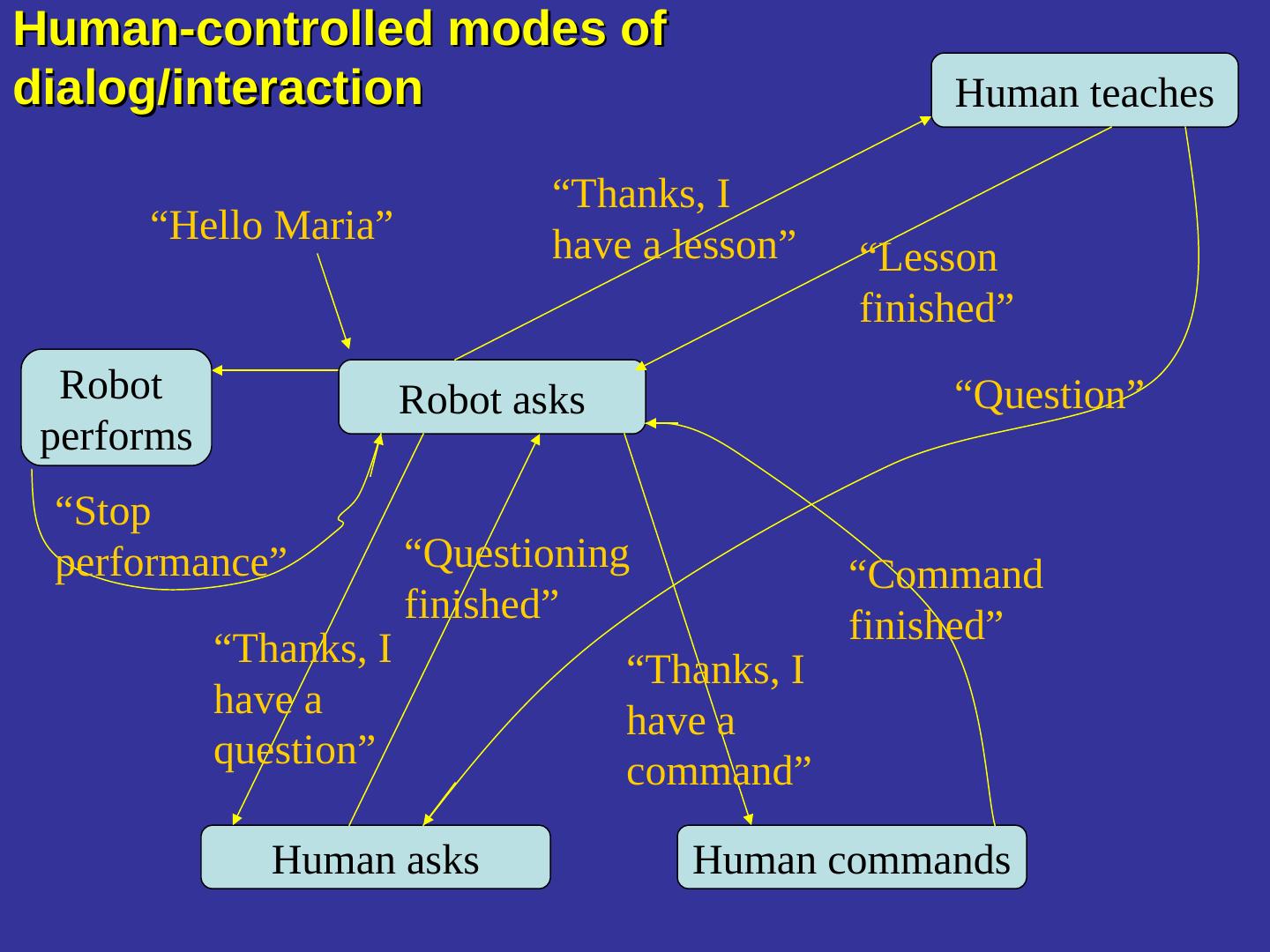
Dialog and Robot’s Knowledge
展开查看详情
1 .Robot Metaphors and Models
2 .Animatronic “Robot” or device brain effectors
3 .Perceiving “Robot” sensors brain
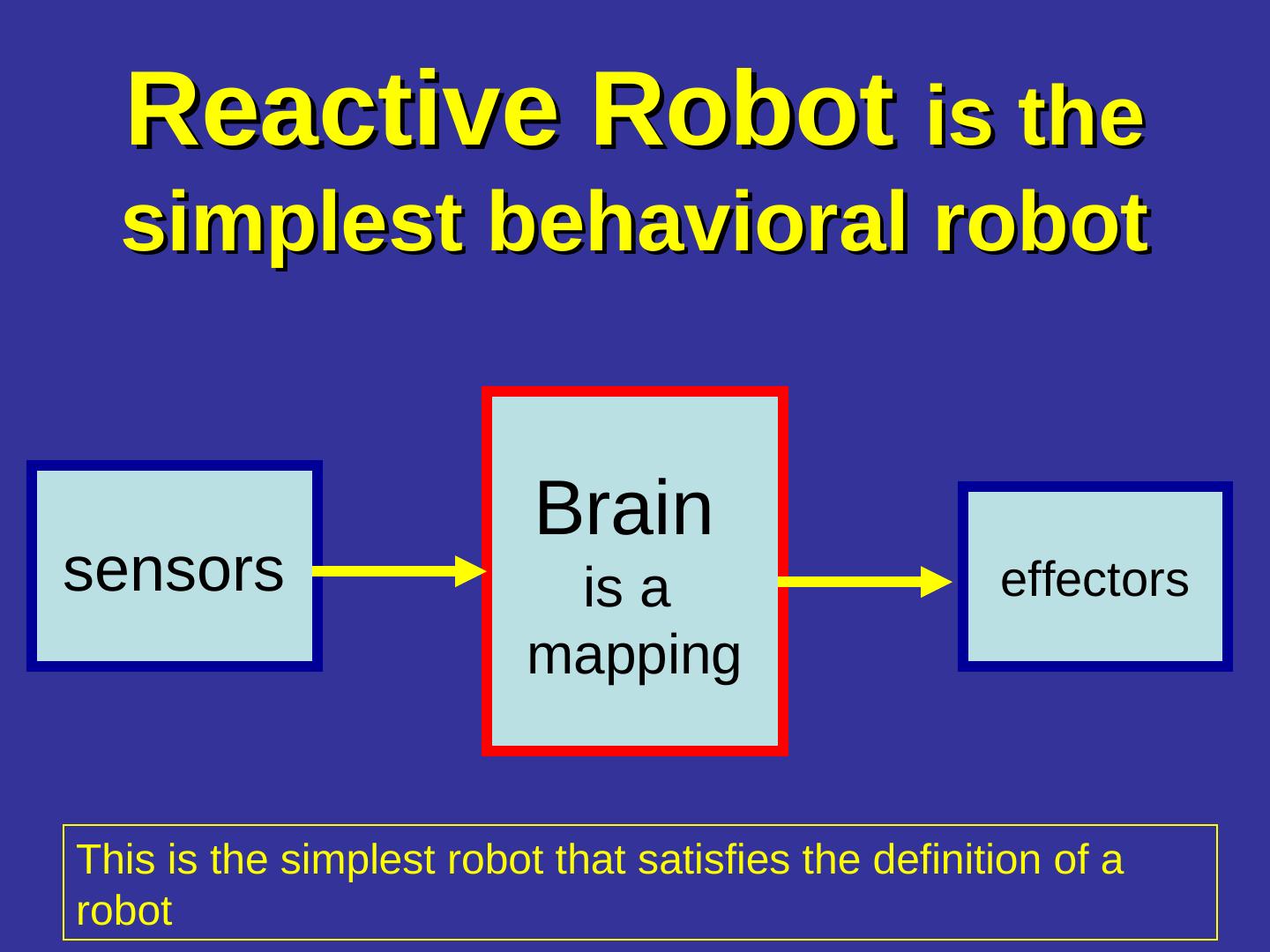
4 . Reactive Robot is the simplest behavioral robot Brain sensors is a effectors mapping This is the simplest robot that satisfies the definition of a robot
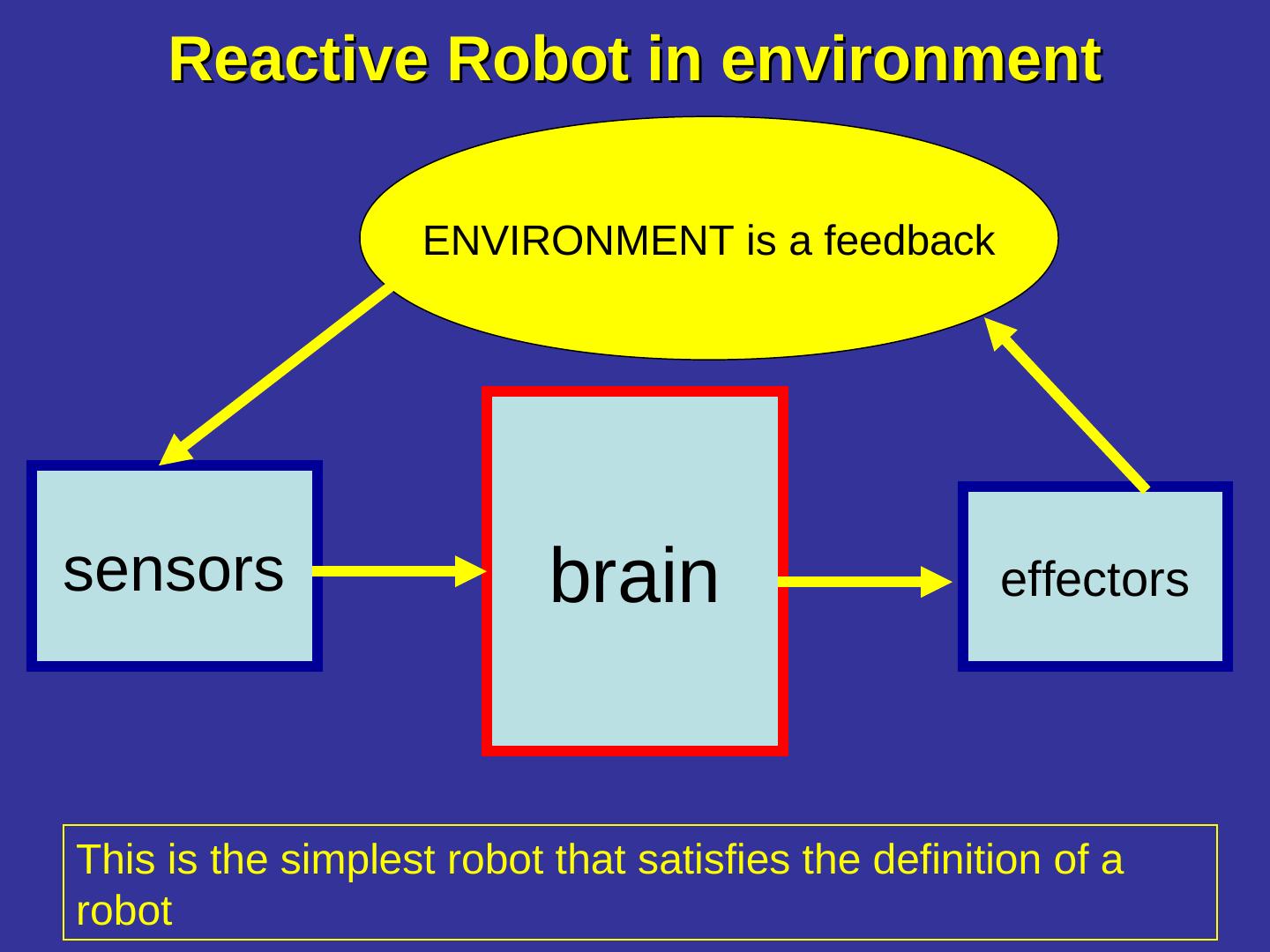
5 . Reactive Robot in environment ENVIRONMENT is a feedback sensors brain effectors This is the simplest robot that satisfies the definition of a robot
6 .Braitenberg Vehicles and Quantum Automata Robots
7 .Another Example: Braitenberg Vehicles and Quantum BV
8 .Braitenberg Vehicles
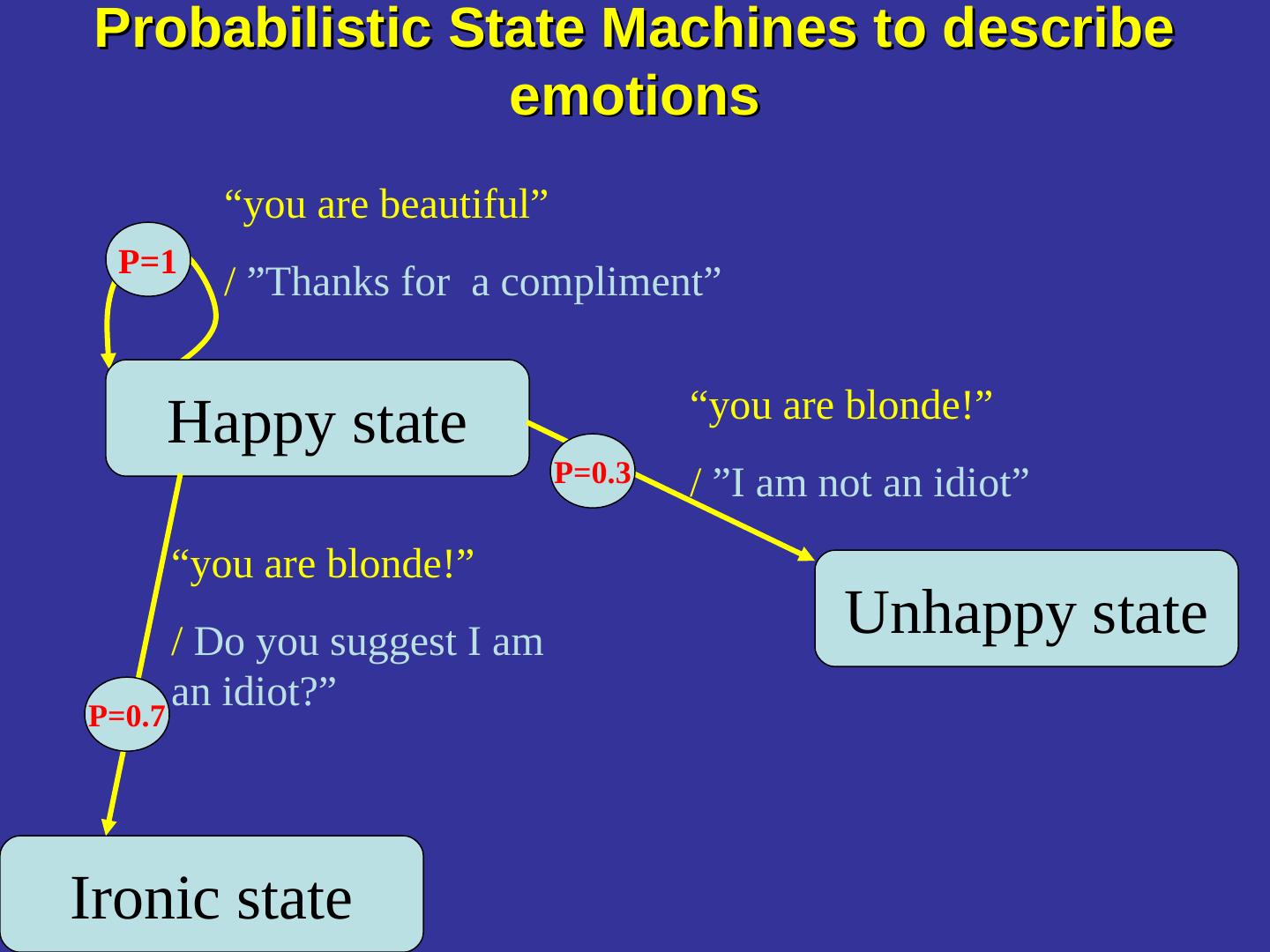
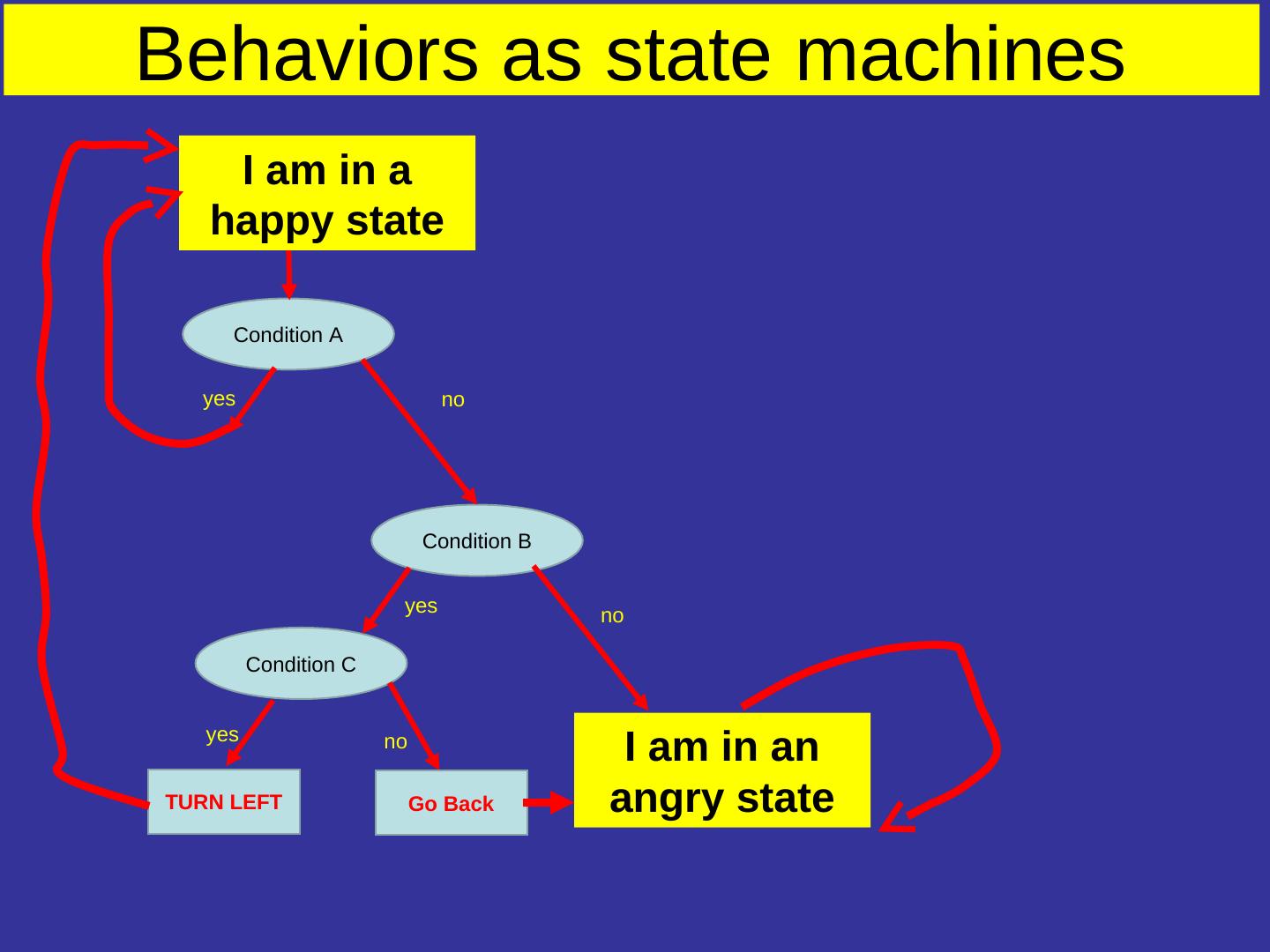
9 . Emotional Robot has a simple form of memory or state Brain is a sensors Finite effectors State Machine This is the simplest robot that satisfies the definition of a robot
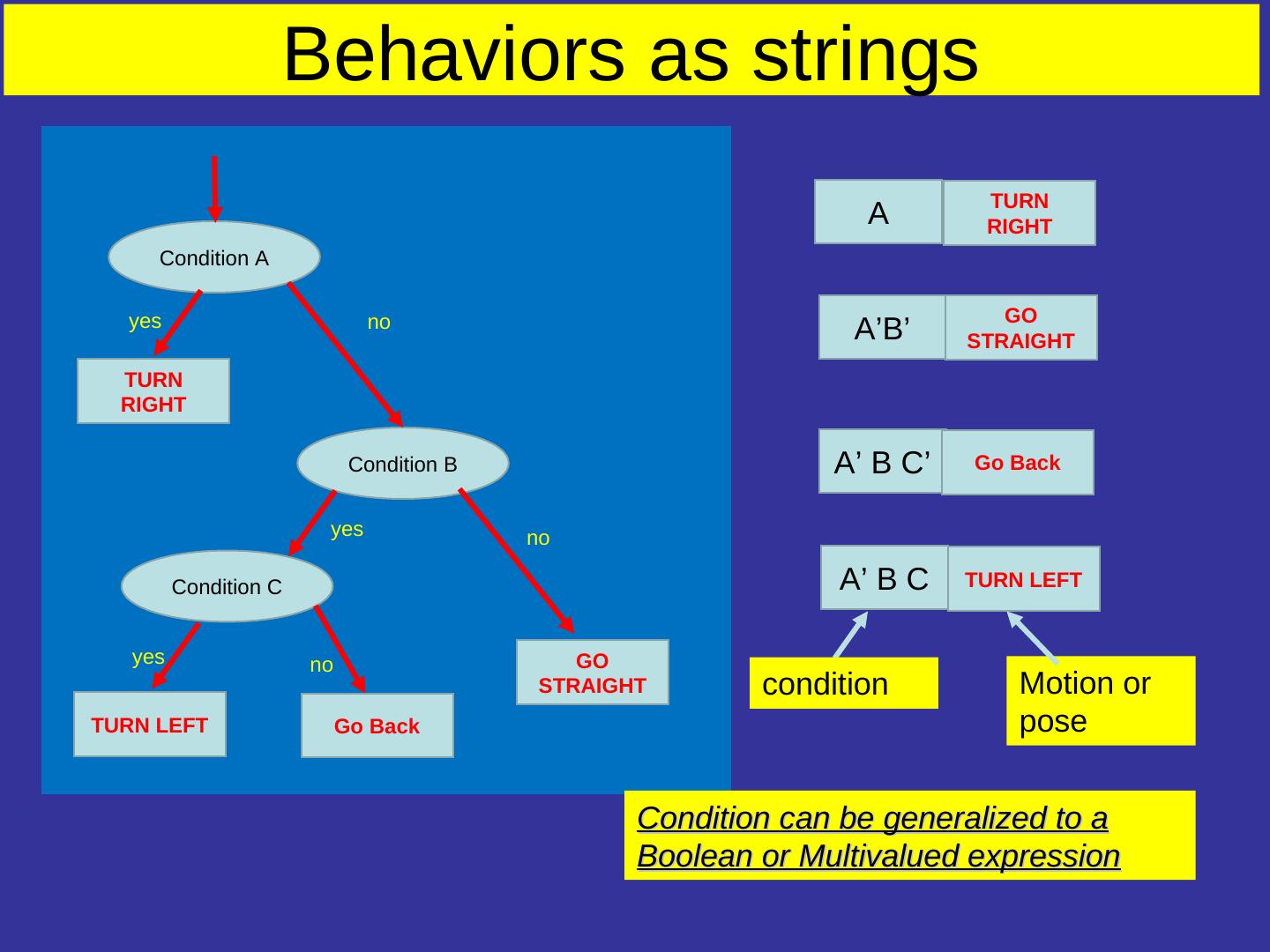
10 . Behavior as an interpretation of a string • Newton, Einstein and Bohr. • Hello Professor • Hello Sir • Turn Left . Turn right. behavior
11 . Behavior as an interpretation of a tree • Newton, Einstein and Bohr. • Hello Professor • Hello Sir • Turn Left . Turn right. behavior Grammar. Derivation. Alphabets.
12 .Our Base Model and Designs
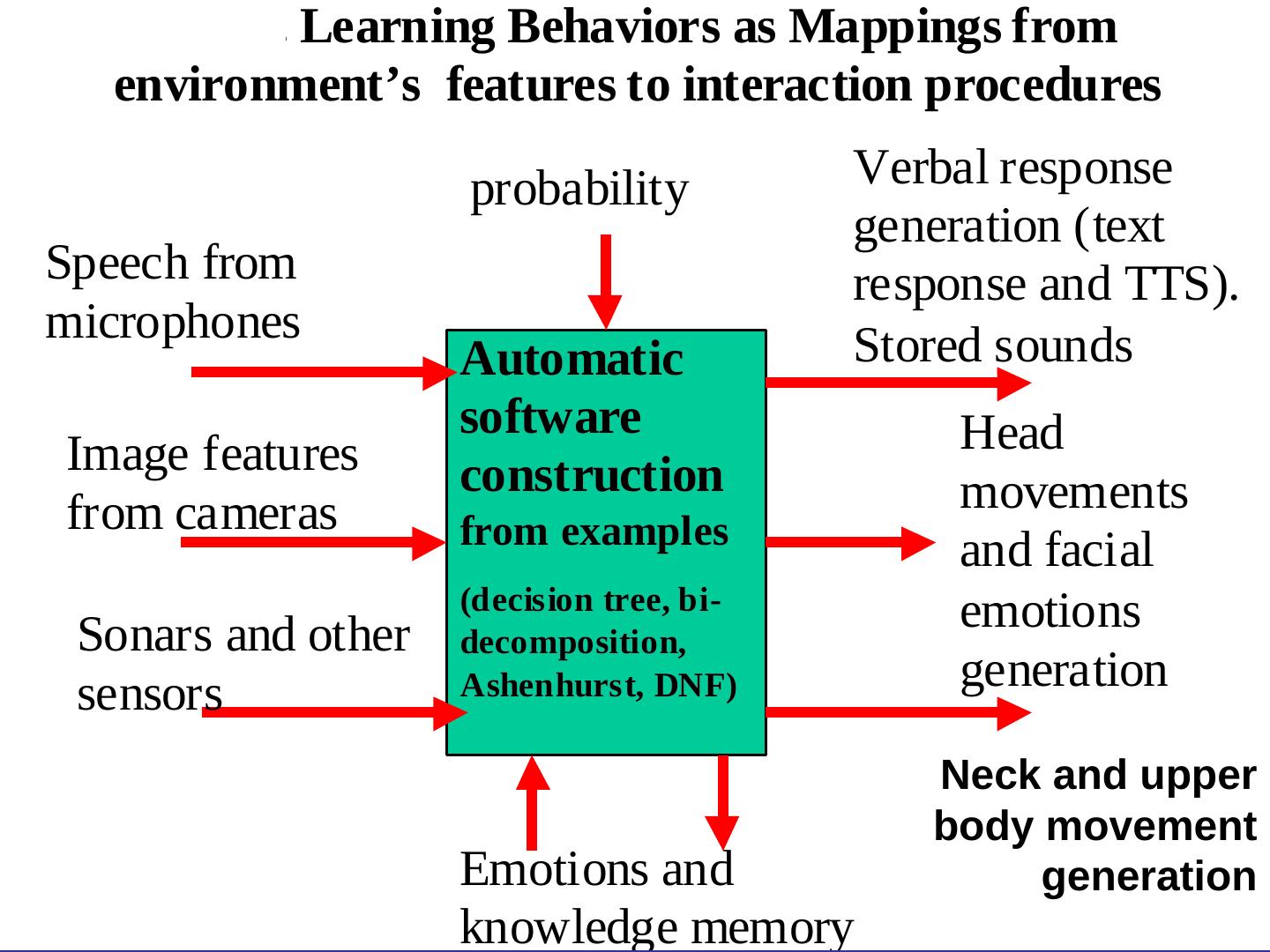
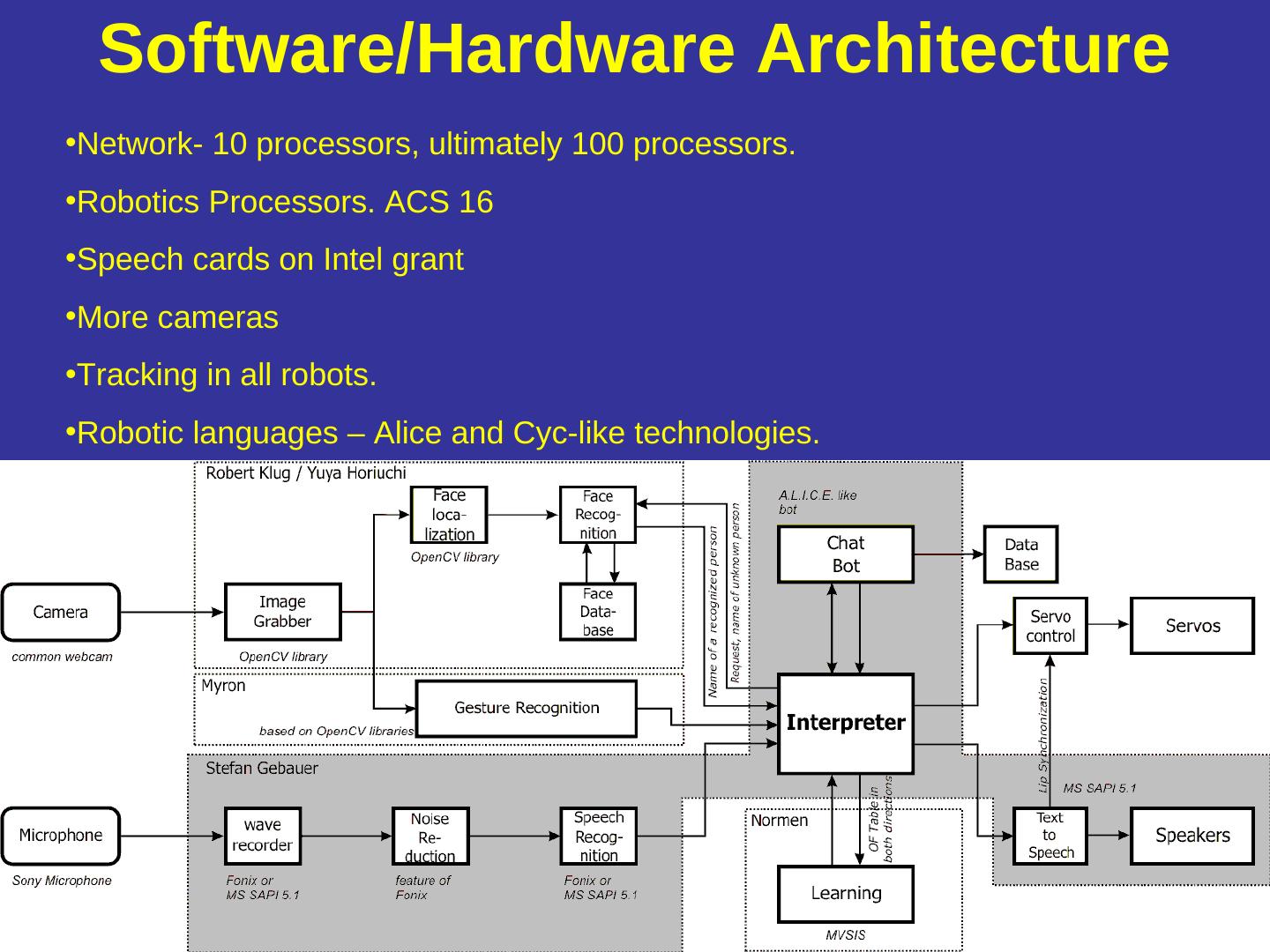
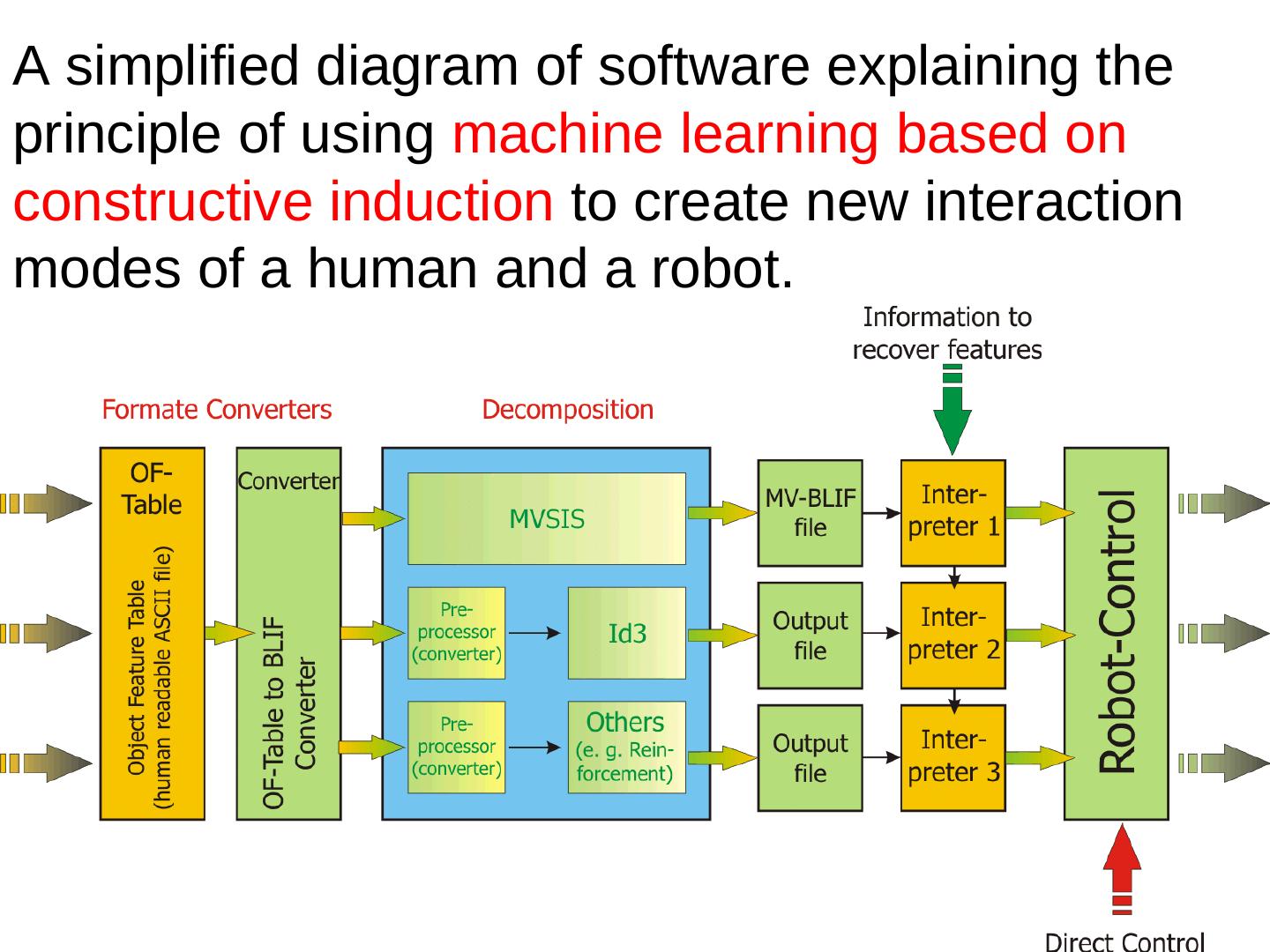
13 . Fig. 1. Learning Behaviors as Mappings from environment’s features to interaction procedures probability Verbal response generation (text Speech from response and TTS). microphones Stored sounds Automatic software Head Image features construction from cameras movements from examples and facial (decision tree, bi bi-- emotions Sonars and other decomposition, sensors Ashenhurst,, DNF) Ashenhurst generation Neck Neck and shoulders and upper movement generation body movement Emotions and generation knowledge memory
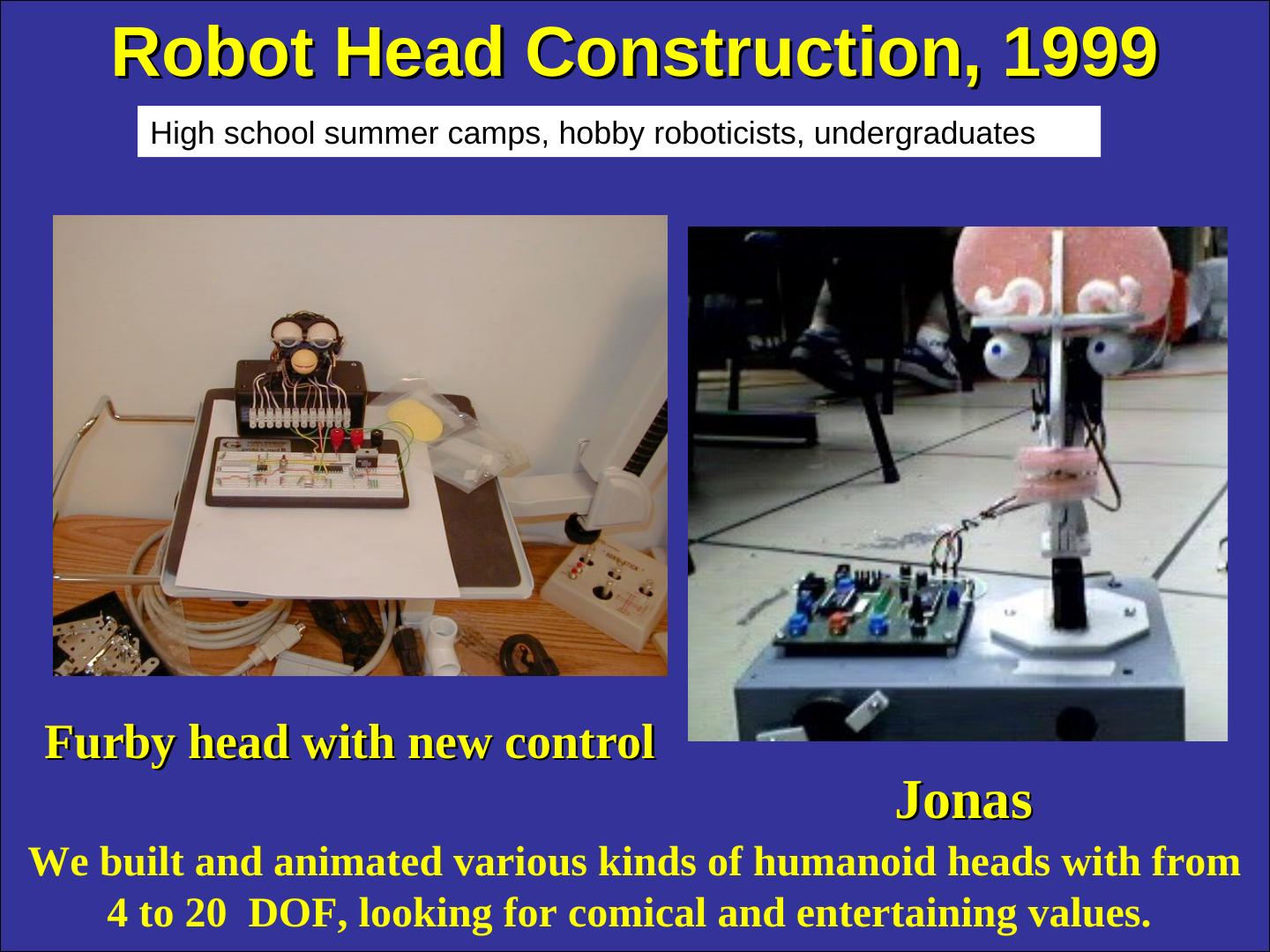
14 . Robot Head Construction, 1999 High school summer camps, hobby roboticists, undergraduates Furby head with new control Jonas We built and animated various kinds of humanoid heads with from 4 to 20 DOF, looking for comical and entertaining values.
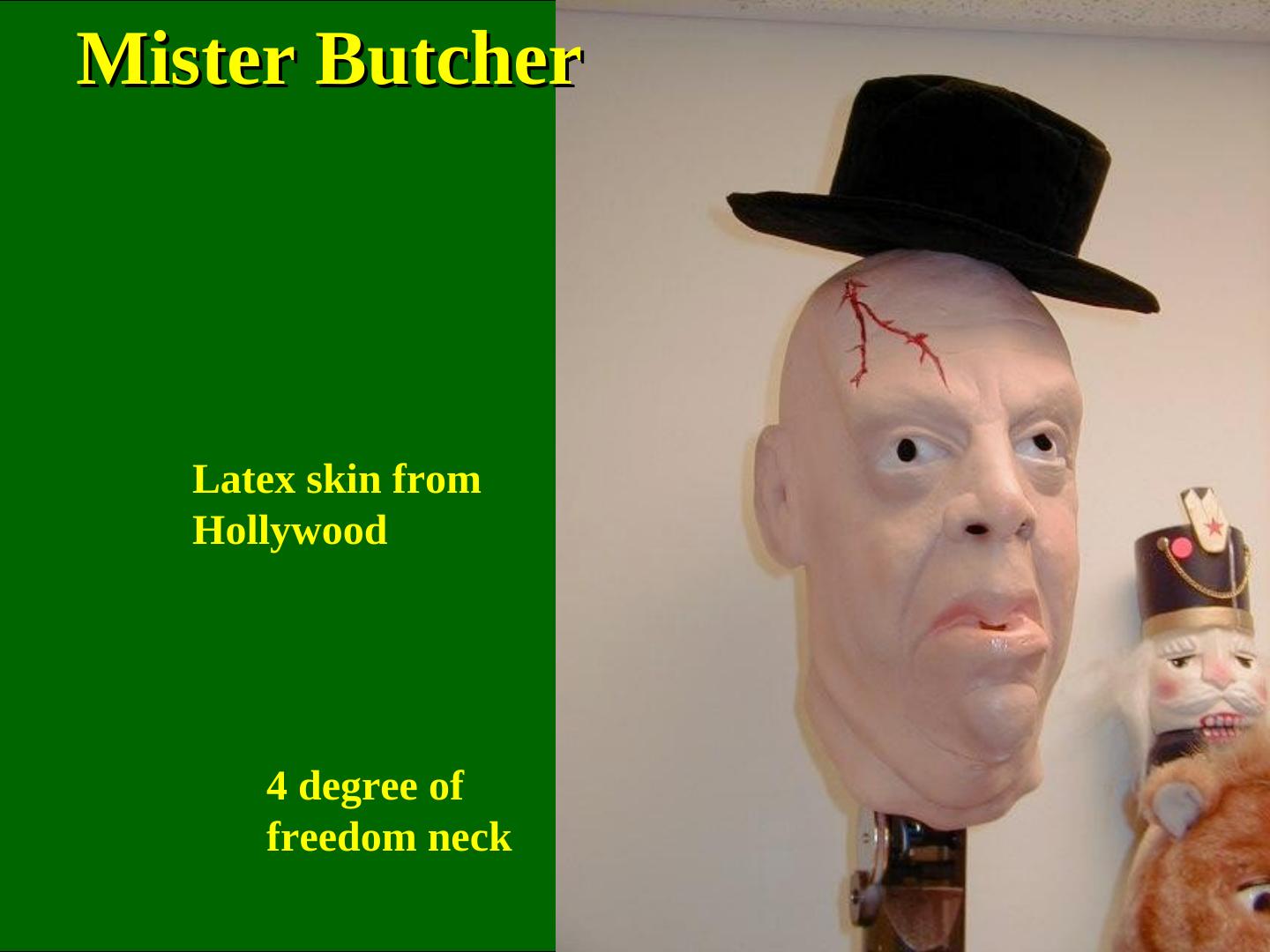
15 .Mister Butcher Latex skin from Hollywood 4 degree of freedom neck
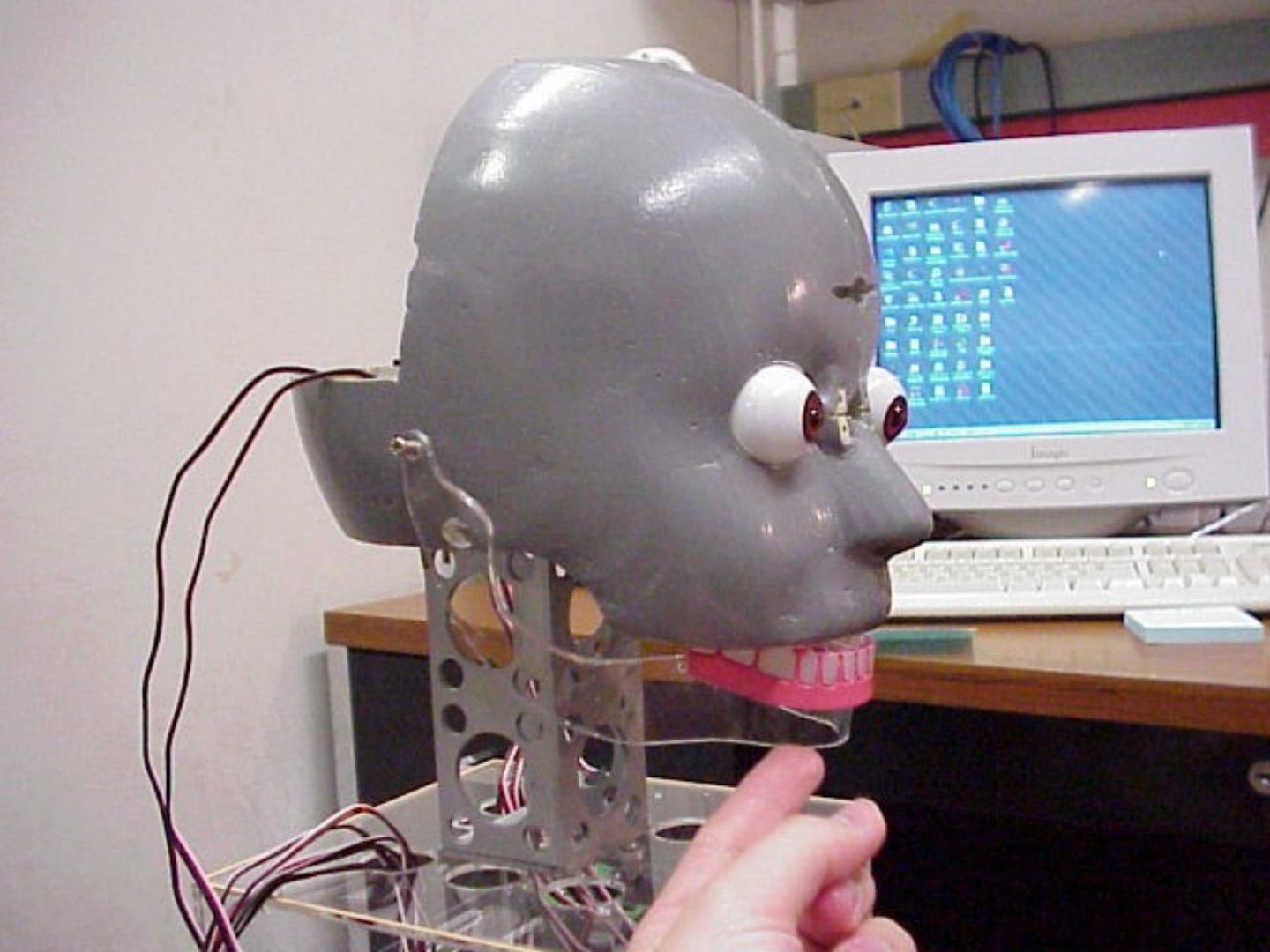
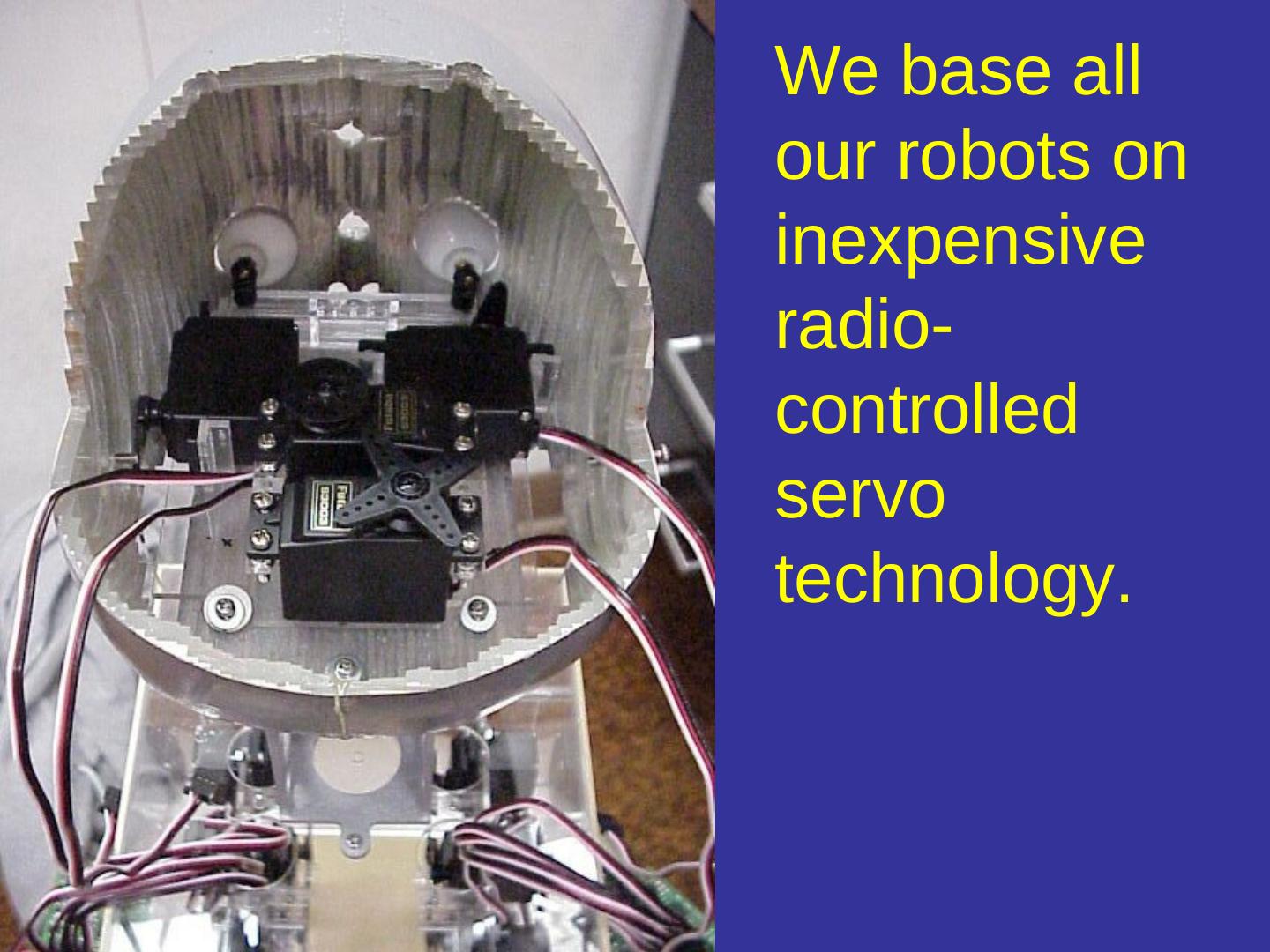
16 .Robot Head Construction, 2000 Skeleton Alien We use inexpensive servos from Hitec and Futaba, plastic, playwood and aluminum. The robots are either PC-interfaced, use simple micro-controllers such as Basic Stamp, or are radio controlled from a PC or by the user.
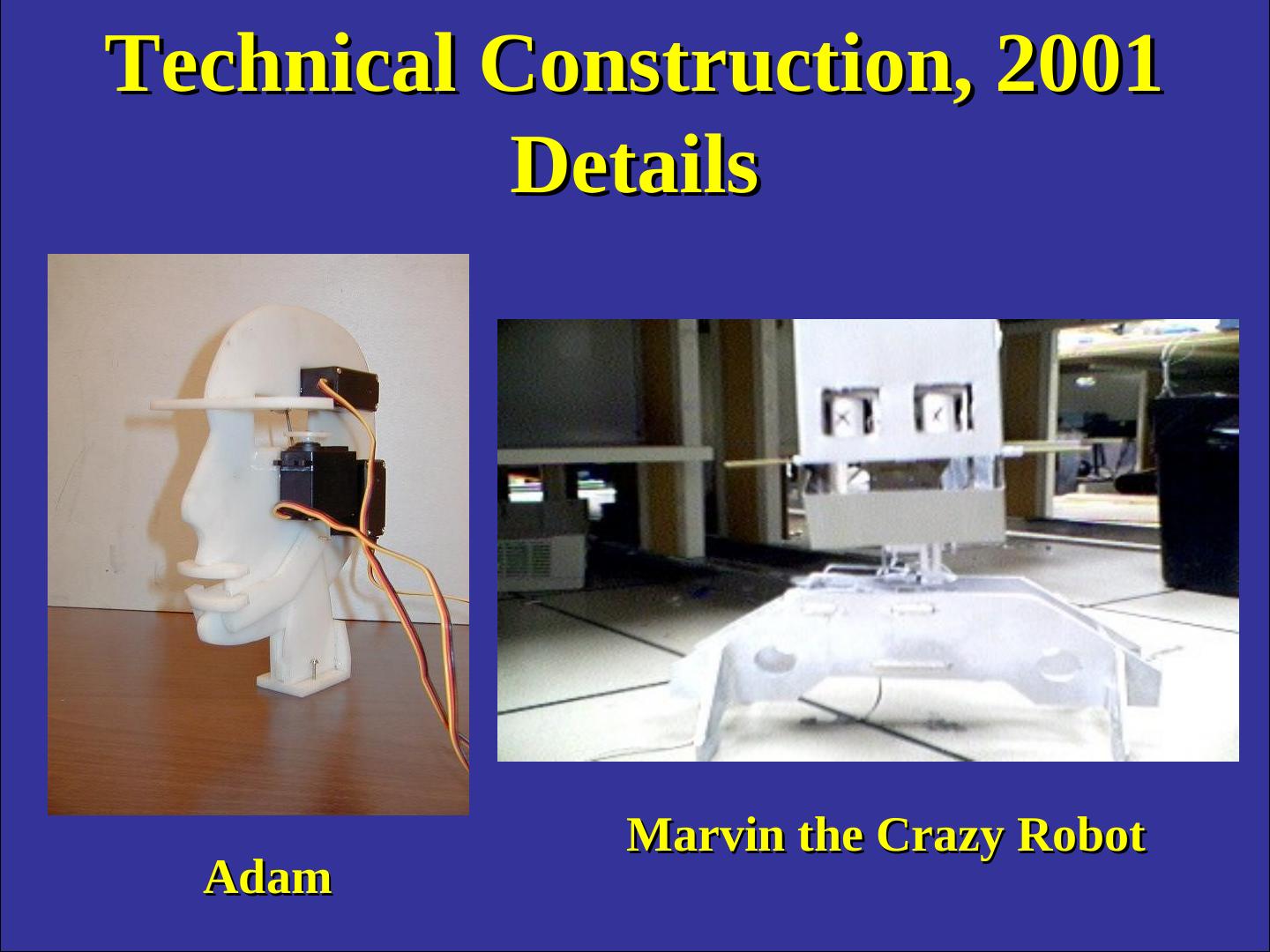
17 .Technical Construction, 2001 Details Marvin the Crazy Robot Adam
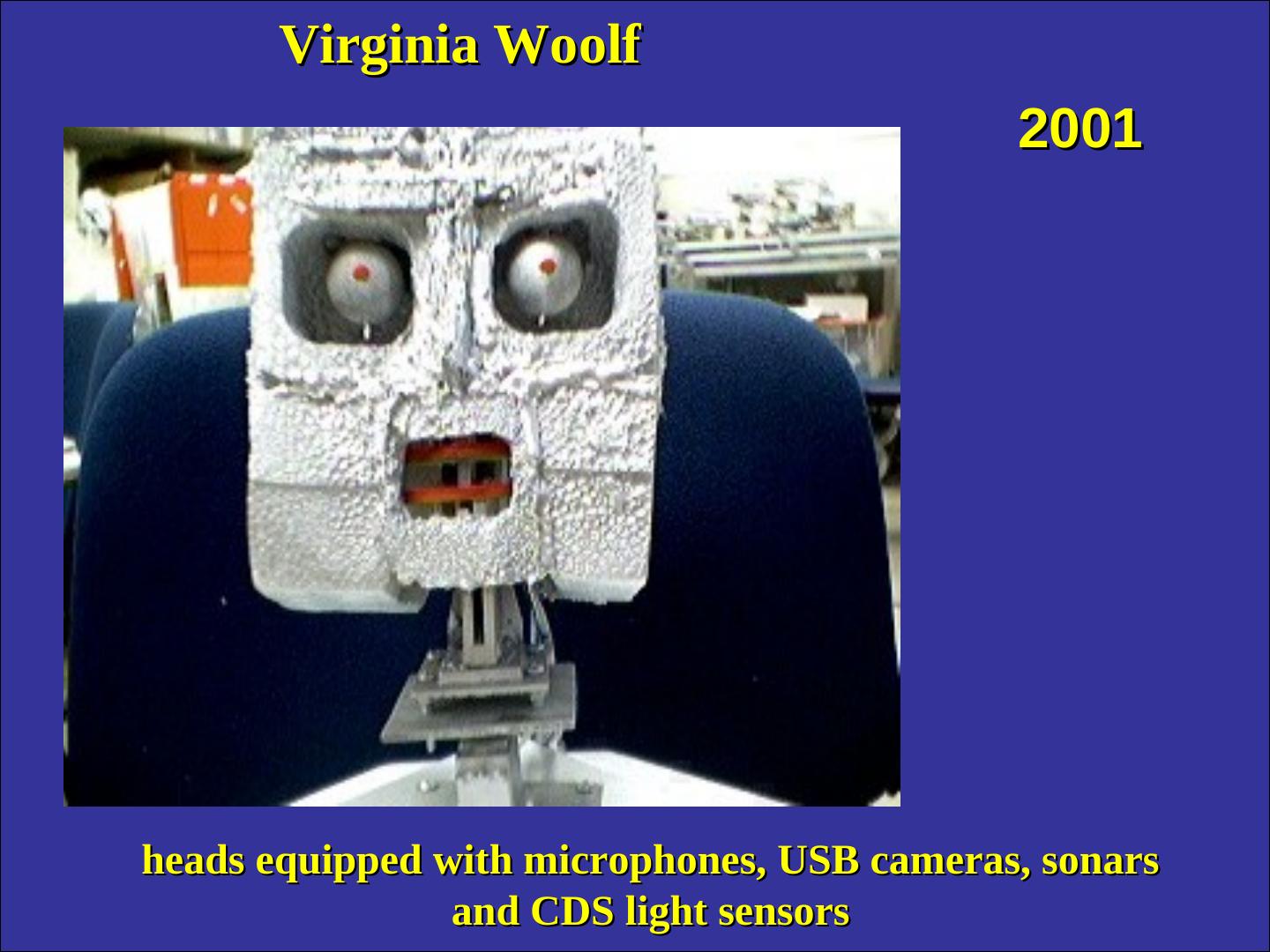
18 . Virginia Woolf 2001 heads equipped with microphones, USB cameras, sonars and CDS light sensors
19 . 2002 Max BUG (Big Ugly Robot) Image processing and pattern recognition uses software developed at PSU, CMU and Intel (public domain software available on WWW). Software is in Visual C++, Visual Basic, Lisp and Prolog.
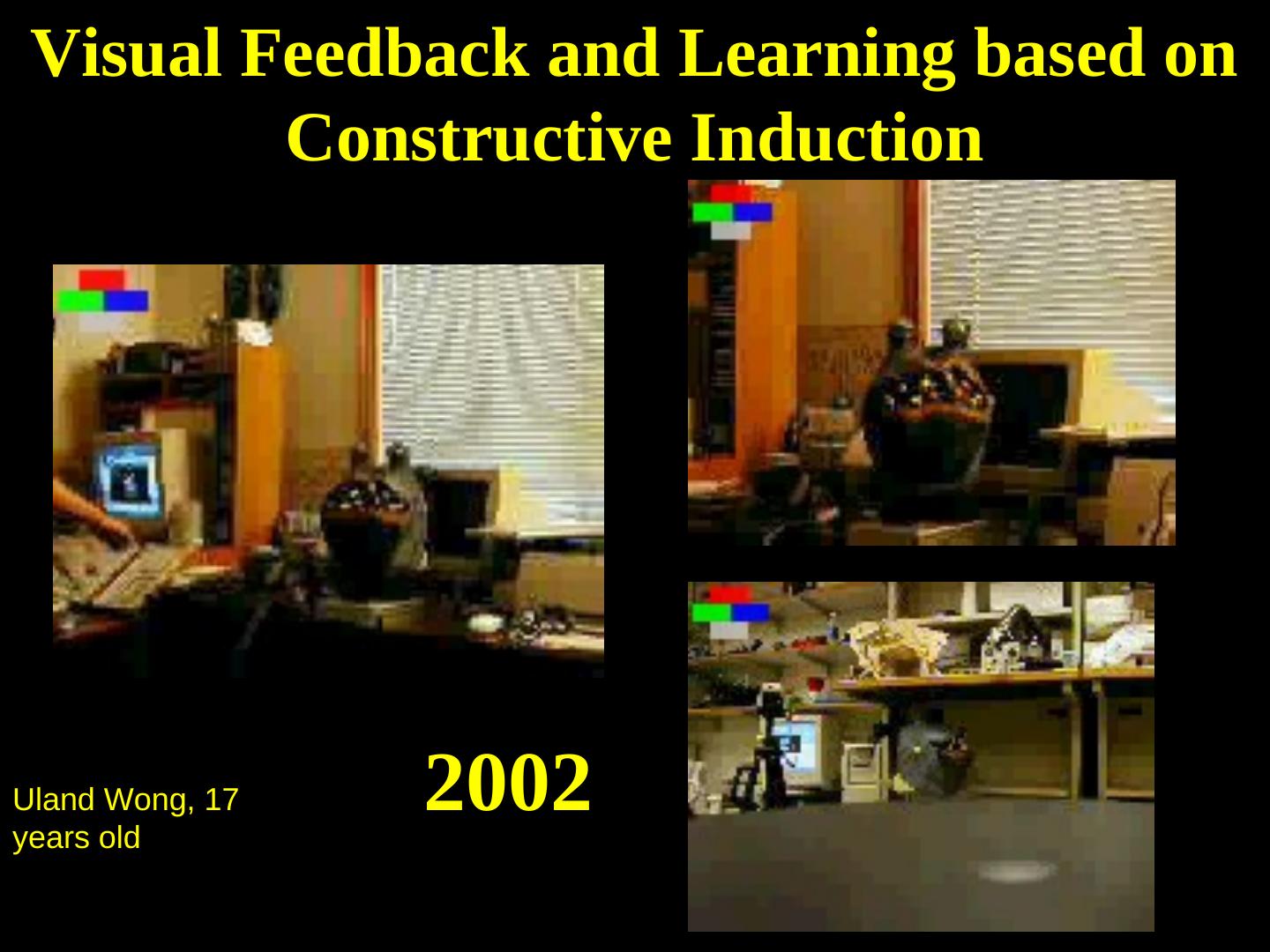
20 . Visual Feedback and Learning based on Constructive Induction Uland Wong, 17 years old 2002
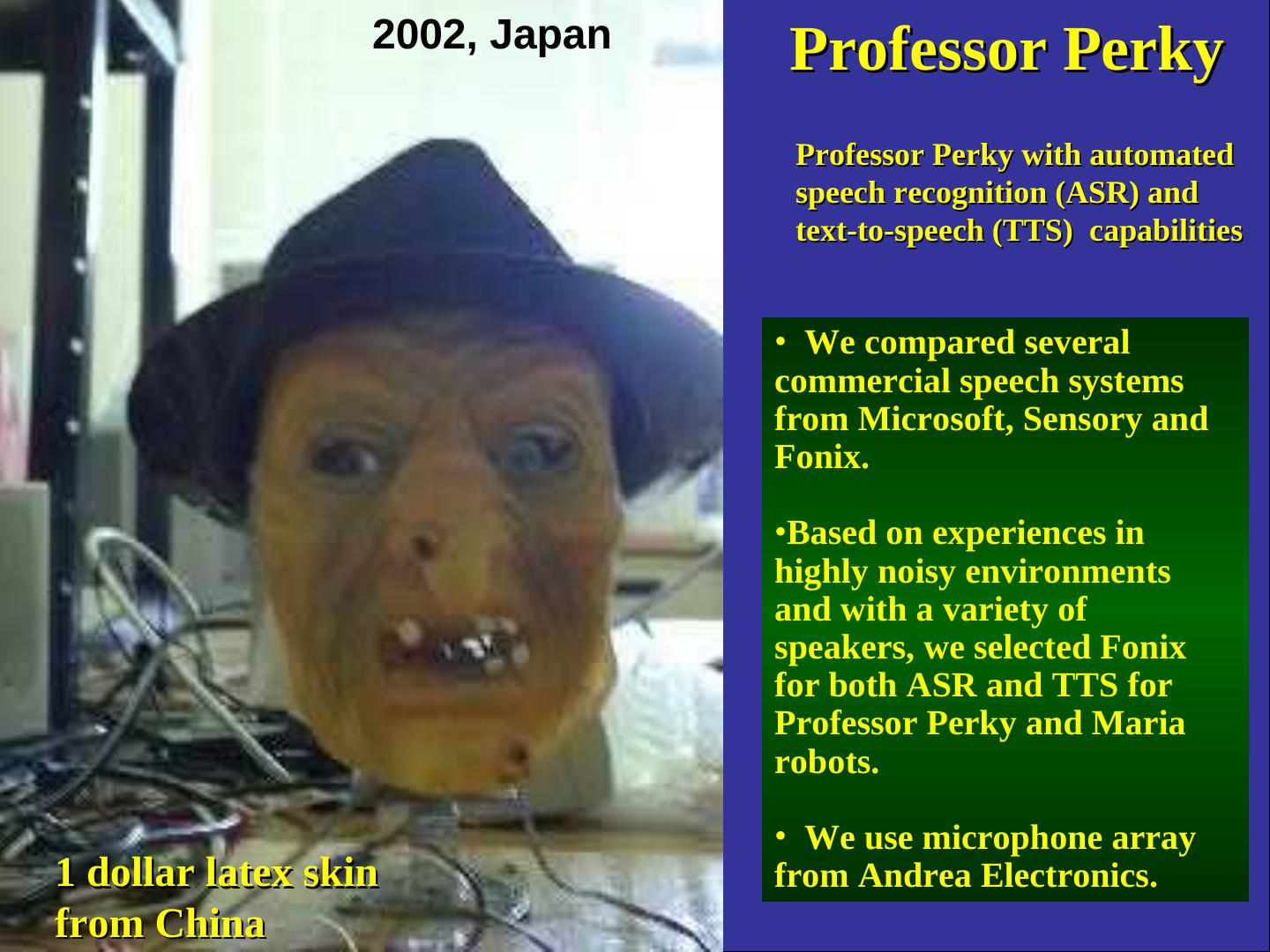
21 . 2002, Japan Professor Perky Professor Perky with automated speech recognition (ASR) and text-to-speech (TTS) capabilities • We compared several commercial speech systems from Microsoft, Sensory and Fonix. •Based on experiences in highly noisy environments and with a variety of speakers, we selected Fonix for both ASR and TTS for Professor Perky and Maria robots. • We use microphone array 1 dollar latex skin from Andrea Electronics. from China
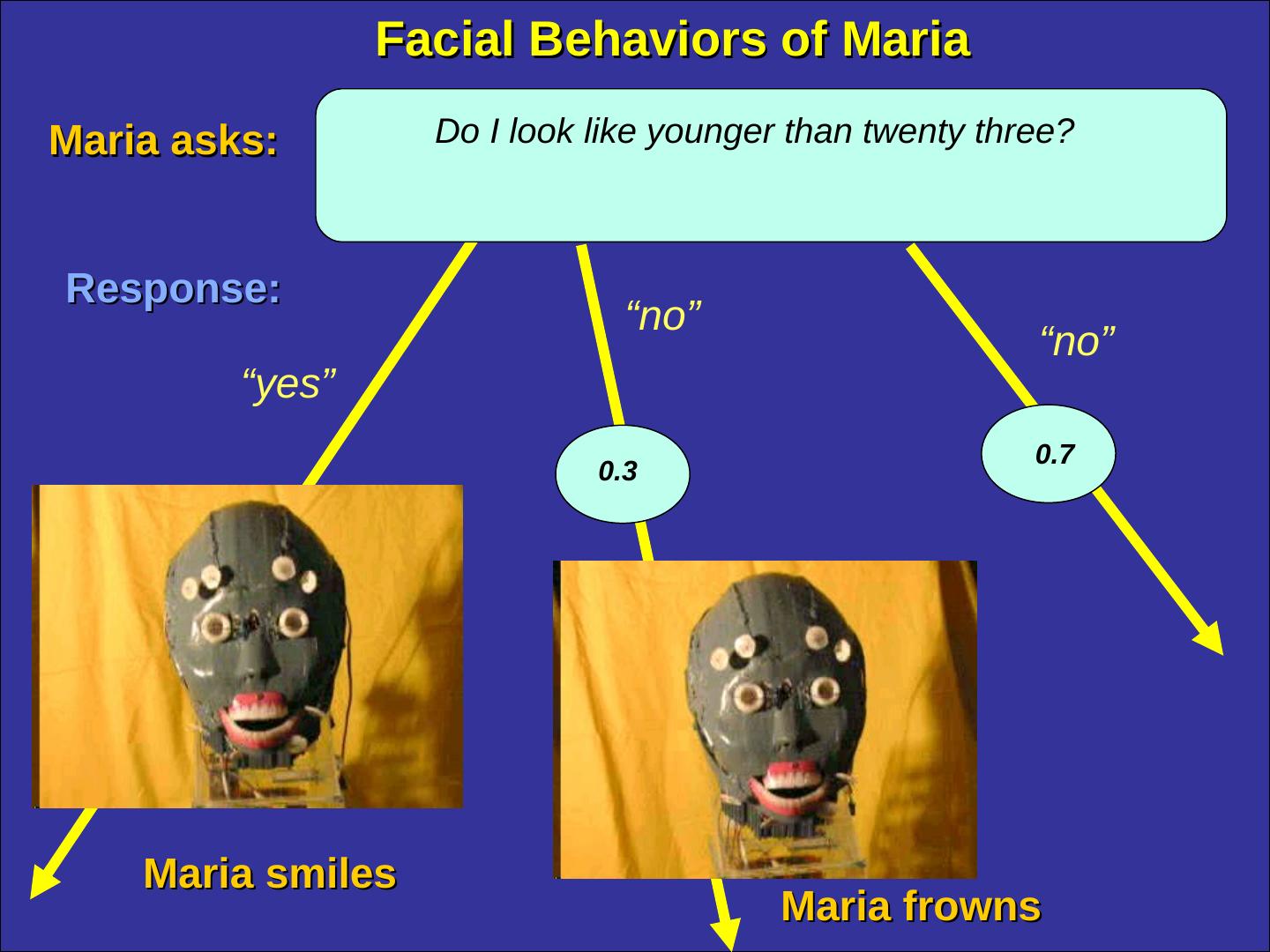
22 . Maria, 2002/2003 20 DOF
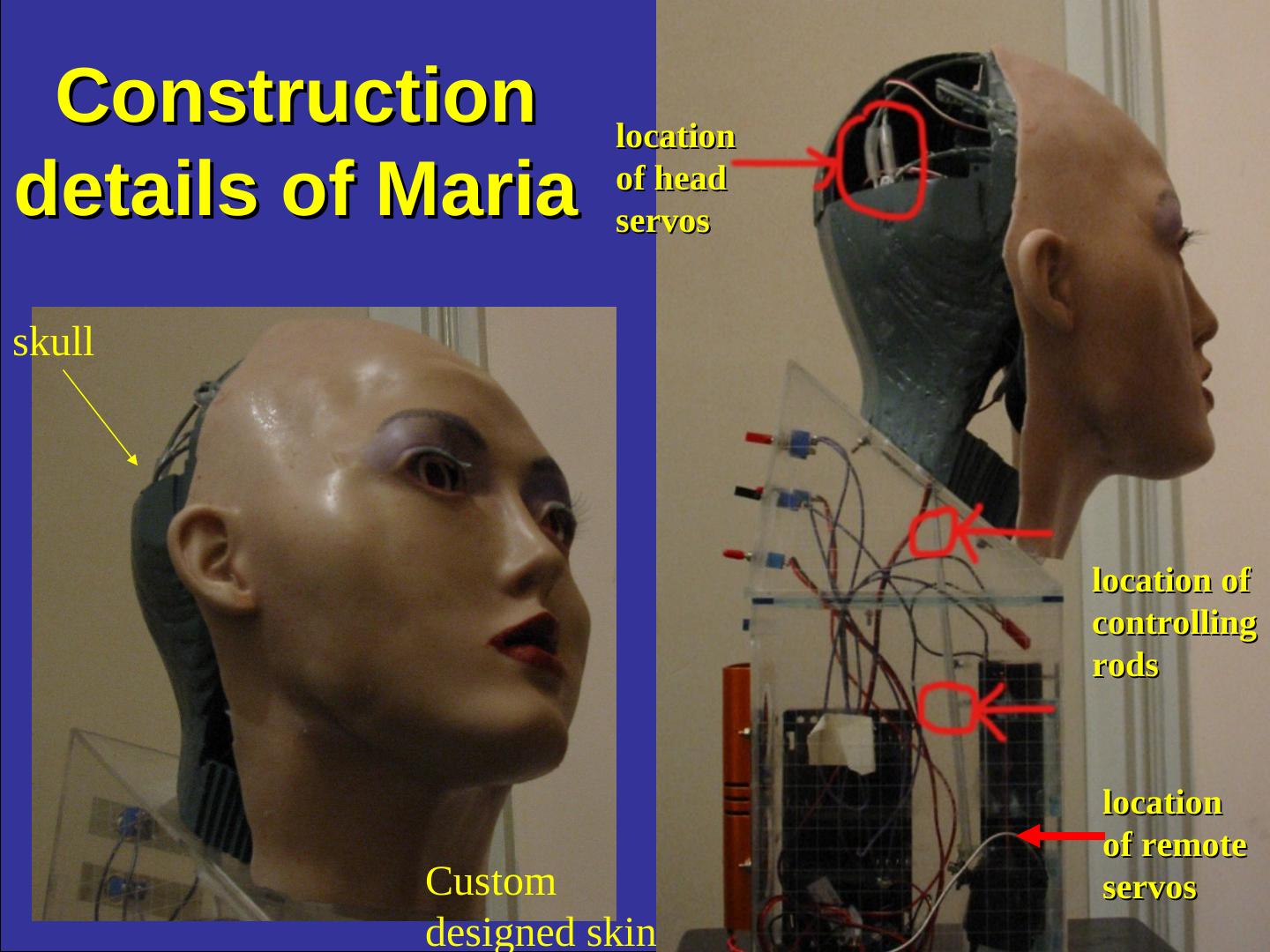
23 . Construction location details of Maria of head servos skull location of controlling rods location of remote Custom servos designed skin
24 .Animation of eyes and eyelids
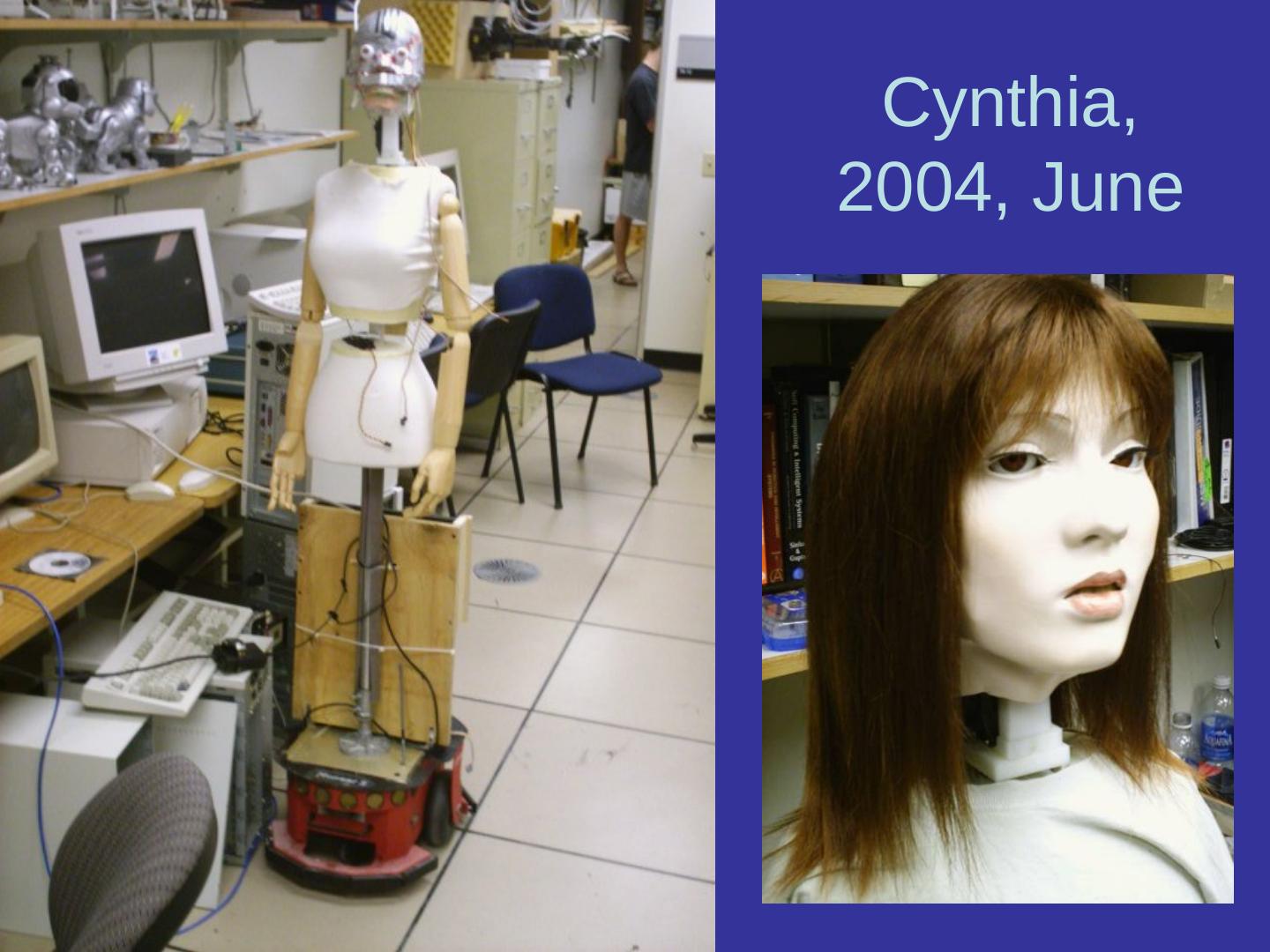
25 . Cynthia, 2004, June
26 . Currently the hands are not moveable. We have a separate hand design project.
27 . Software/Hardware Architecture •Network- 10 processors, ultimately 100 processors. •Robotics Processors. ACS 16 •Speech cards on Intel grant •More cameras •Tracking in all robots. •Robotic languages – Alice and Cyc-like technologies.
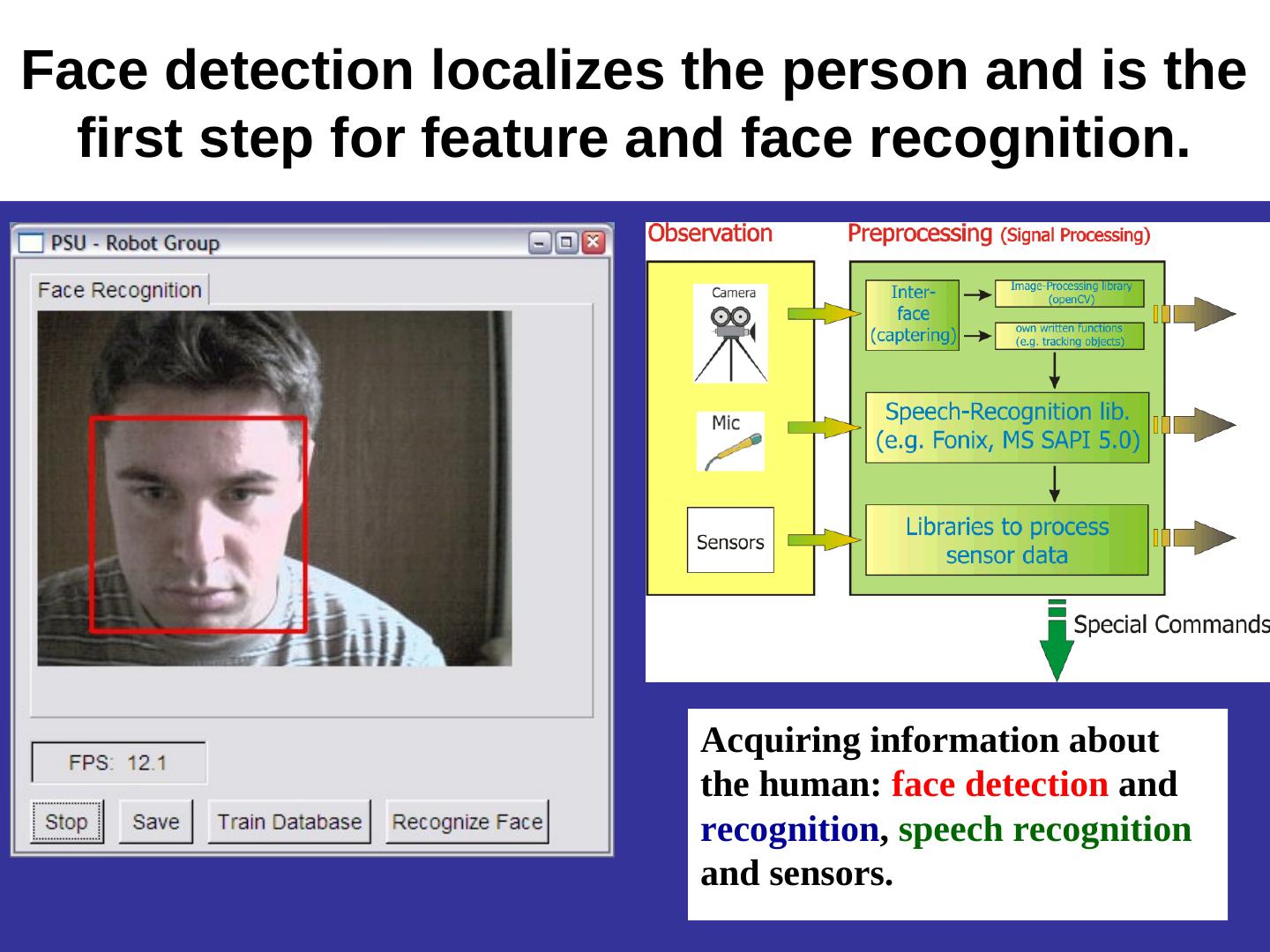
28 .Face detection localizes the person and is the first step for feature and face recognition. Acquiring information about the human: face detection and recognition, speech recognition and sensors.
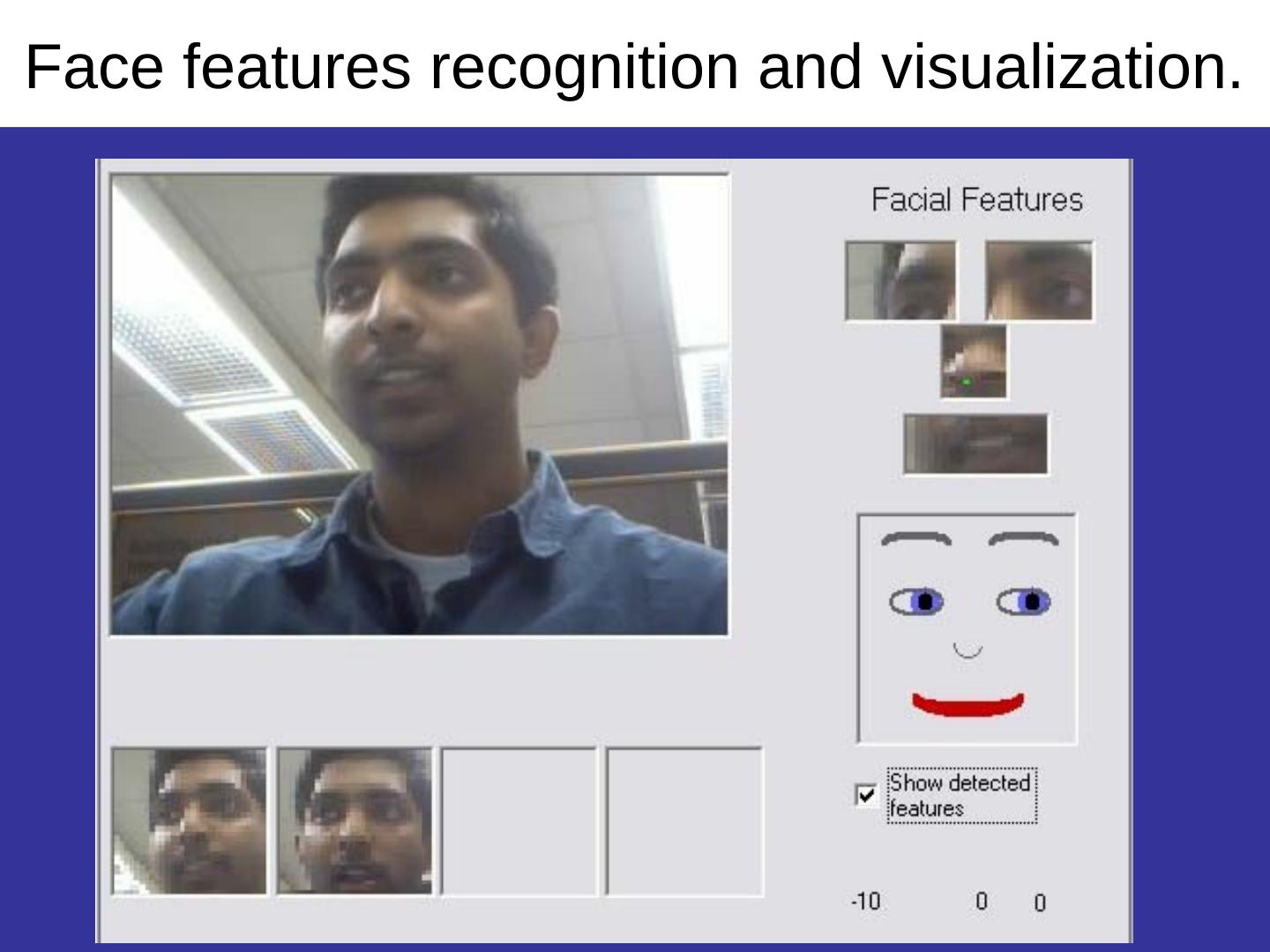
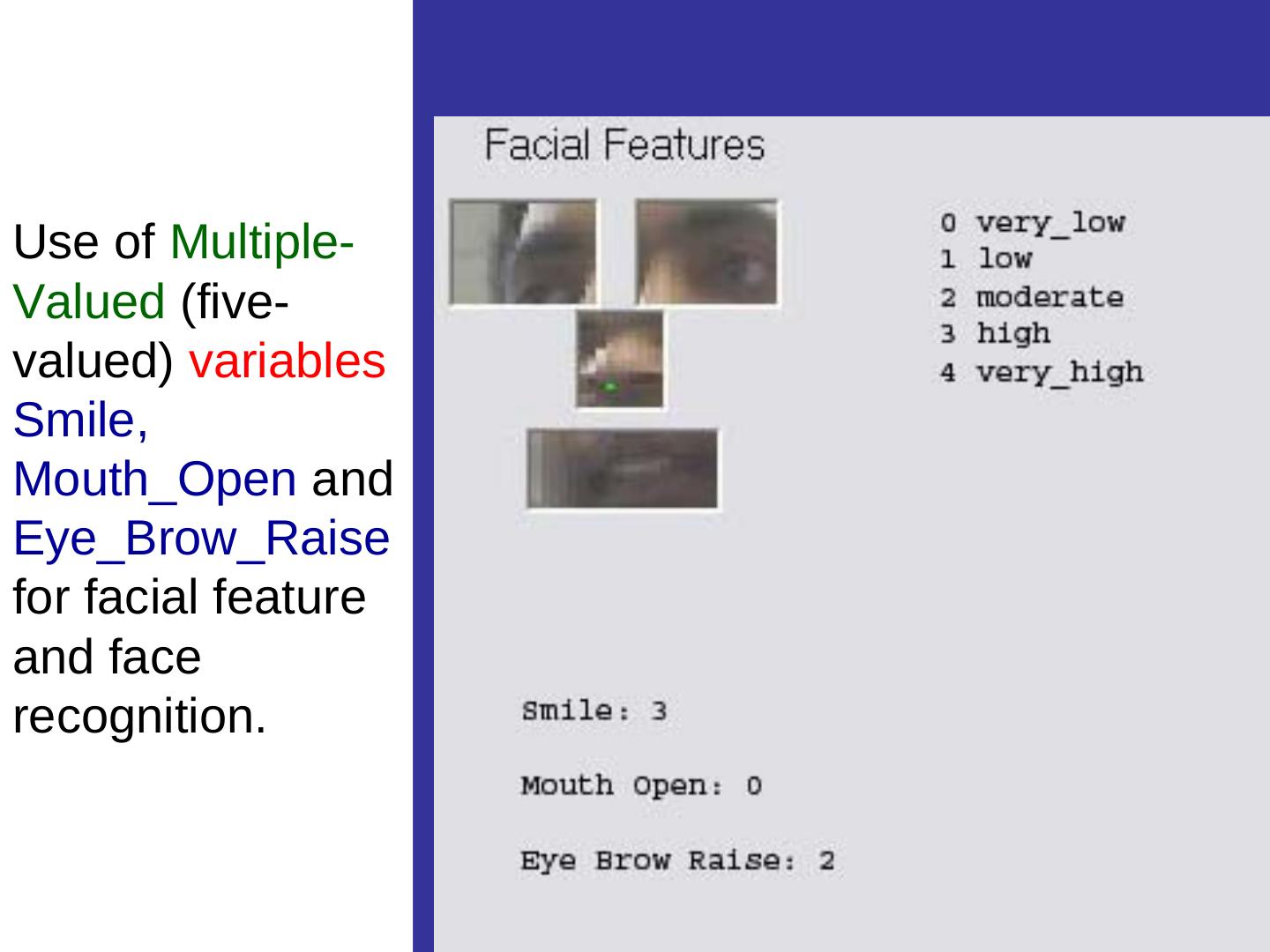
29 .Face features recognition and visualization.
3秒后跳转登录页面
去登陆

