









- 快召唤伙伴们来围观吧
- 微博 QQ QQ空间 贴吧
- 文档嵌入链接
- 复制
- 微信扫一扫分享
- 已成功复制到剪贴板
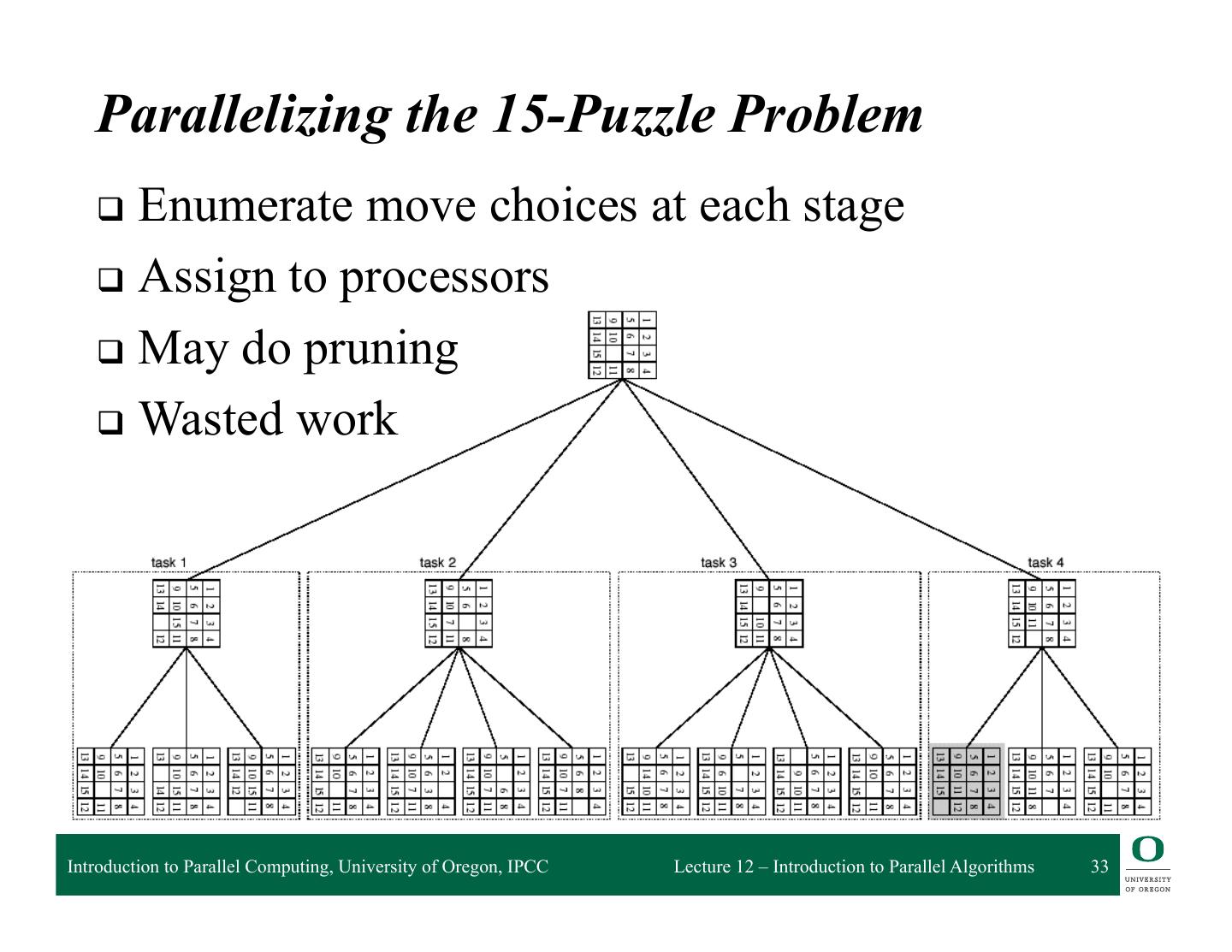
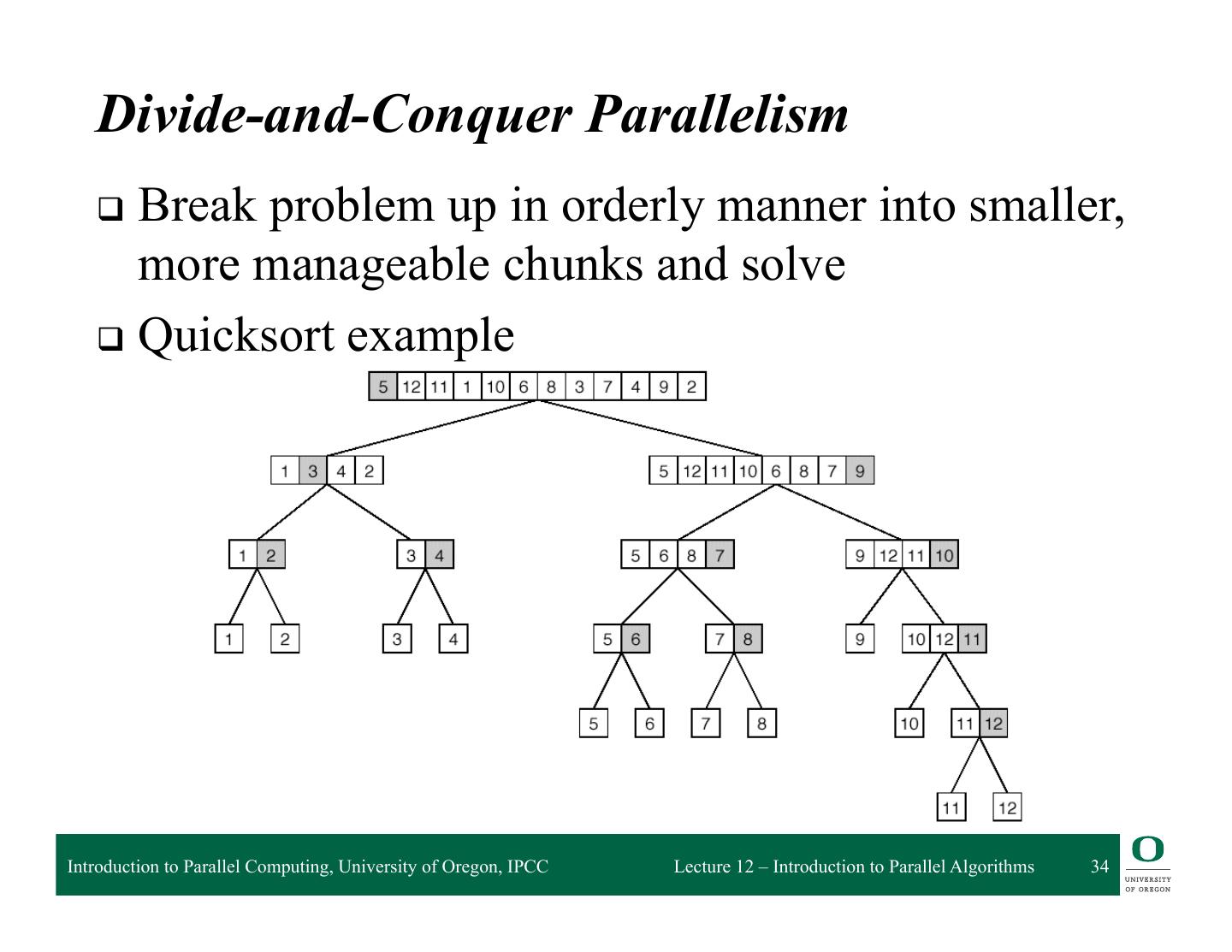
12-Introduction to Parallel Algorithms and Parallel Program Design
Methodological Design
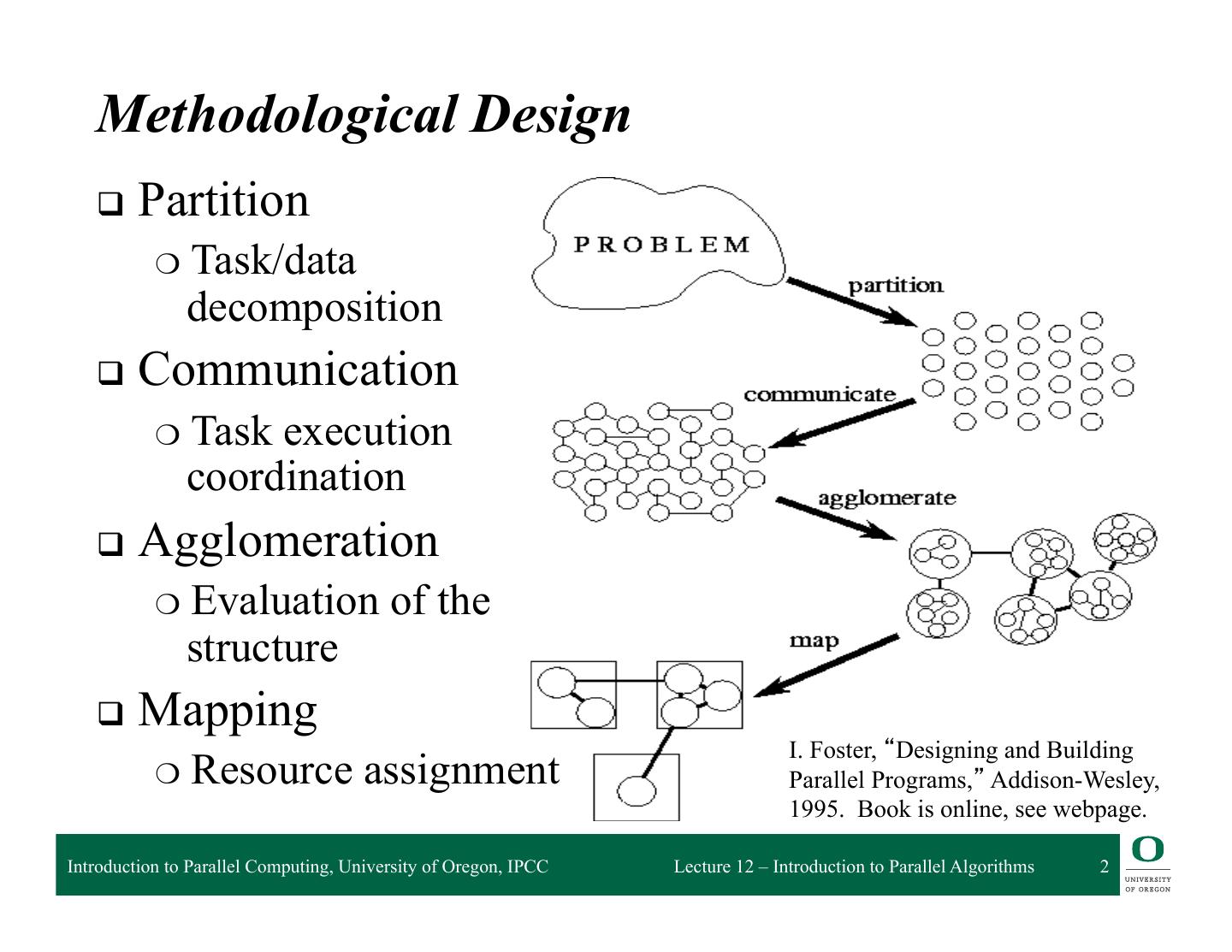
Partition
❍ Task/datadecomposition
Communication
❍ Task executioncoordination
Agglomeration
❍ Evaluation of thestructure
Mapping
❍ Resource assignment
展开查看详情
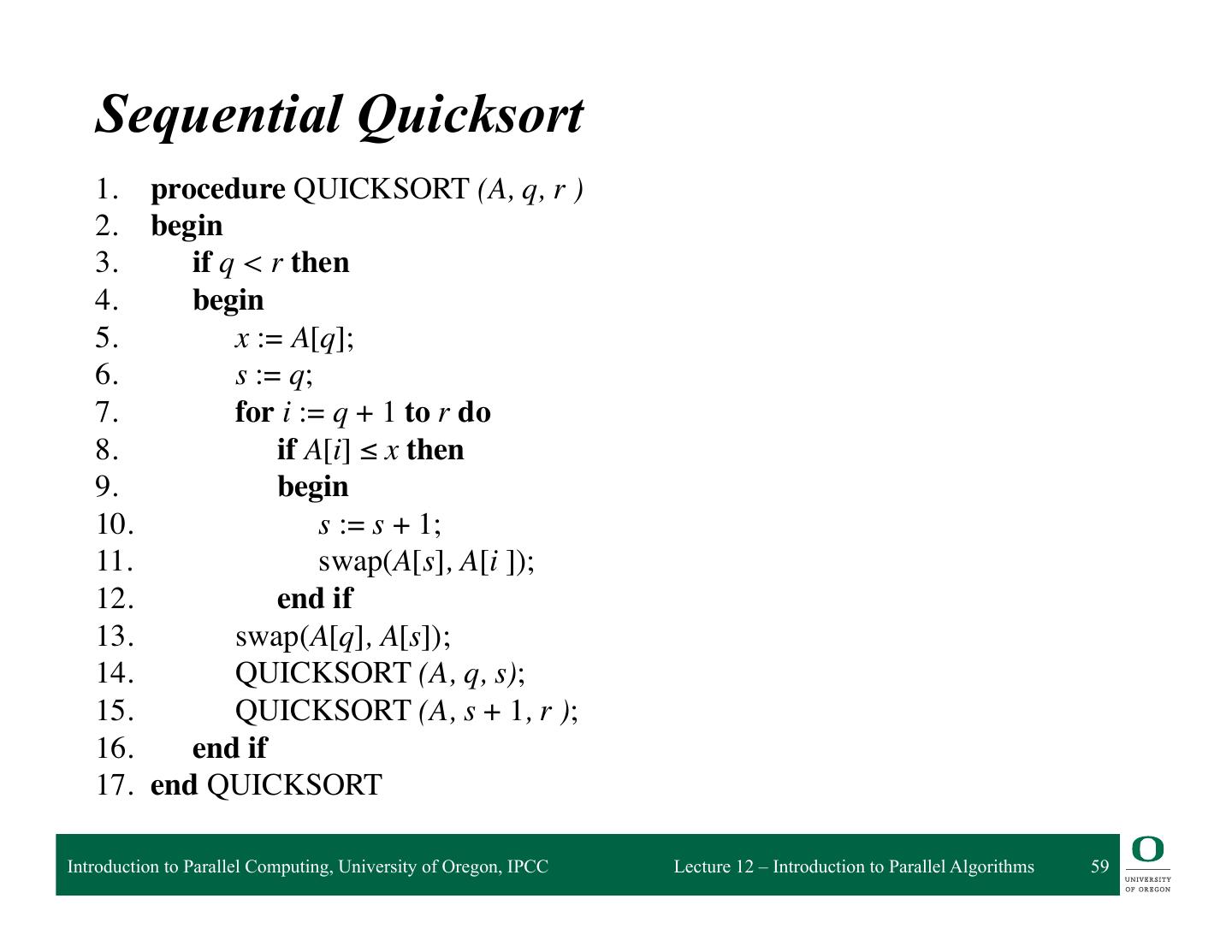
1 .Introduction to Parallel Algorithms and Parallel Program Design Parallel Computing CIS 410/510 Department of Computer and Information Science Lecture 12 – Introduction to Parallel Algorithms
2 . Methodological Design q Partition ❍ Task/data decomposition q Communication ❍ Task execution coordination q Agglomeration ❍ Evaluation of the structure q Mapping I. Foster, “Designing and Building ❍ Resource assignment Parallel Programs,” Addison-Wesley, 1995. Book is online, see webpage. Introduction to Parallel Computing, University of Oregon, IPCC Lecture 12 – Introduction to Parallel Algorithms 2
3 . Partitioning q Partitioning stage is intended to expose opportunities for parallel execution q Focus on defining large number of small task to yield a fine-grained decomposition of the problem q A good partition divides into small pieces both the computational tasks associated with a problem and the data on which the tasks operates q Domain decomposition focuses on computation data q Functional decomposition focuses on computation tasks q Mixing domain/functional decomposition is possible Introduction to Parallel Computing, University of Oregon, IPCC Lecture 12 – Introduction to Parallel Algorithms 3
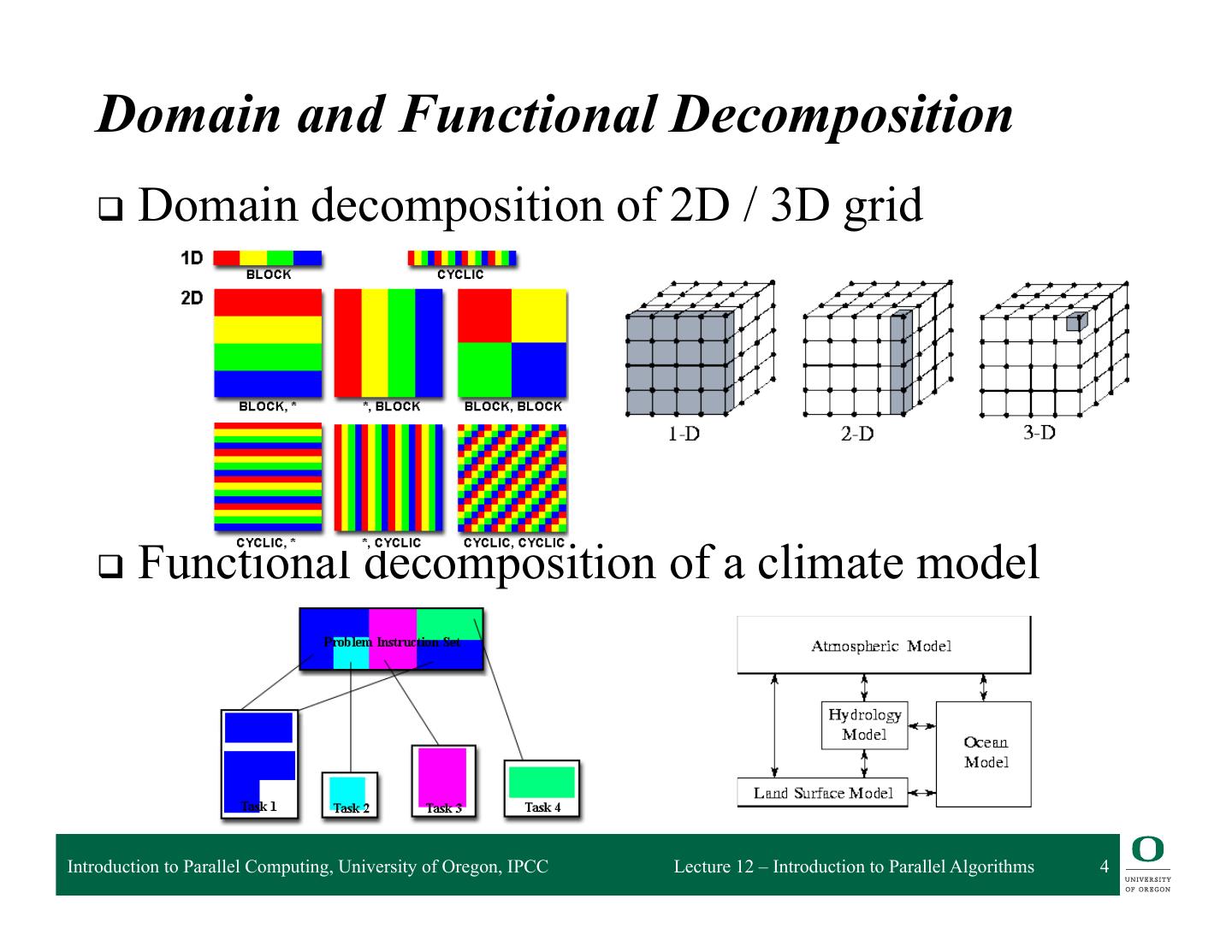
4 . Domain and Functional Decomposition q Domain decomposition of 2D / 3D grid q Functional decomposition of a climate model Introduction to Parallel Computing, University of Oregon, IPCC Lecture 12 – Introduction to Parallel Algorithms 4
5 . Partitioning Checklist q Does your partition define at least an order of magnitude more tasks than there are processors in your target computer? If not, may loose design flexibility. q Does your partition avoid redundant computation and storage requirements? If not, may not be scalable. q Are tasks of comparable size? If not, it may be hard to allocate each processor equal amounts of work. q Does the number of tasks scale with problem size? If not may not be able to solve larger problems with more processors q Have you identified several alternative partitions? Introduction to Parallel Computing, University of Oregon, IPCC Lecture 12 – Introduction to Parallel Algorithms 5
6 . Communication (Interaction) q Tasks generated by a partition must interact to allow the computation to proceed ❍ Information flow: data and control q Types of communication ❍ Local vs. Global: locality of communication ❍ Structured vs. Unstructured: communication patterns ❍ Static vs. Dynamic: determined by runtime conditions ❍ Synchronous vs. Asynchronous: coordination degree q Granularity and frequency of communication ❍ Size of data exchange q Think of communication as interaction and control ❍ Applicable to both shared and distributed memory parallelism Introduction to Parallel Computing, University of Oregon, IPCC Lecture 12 – Introduction to Parallel Algorithms 6
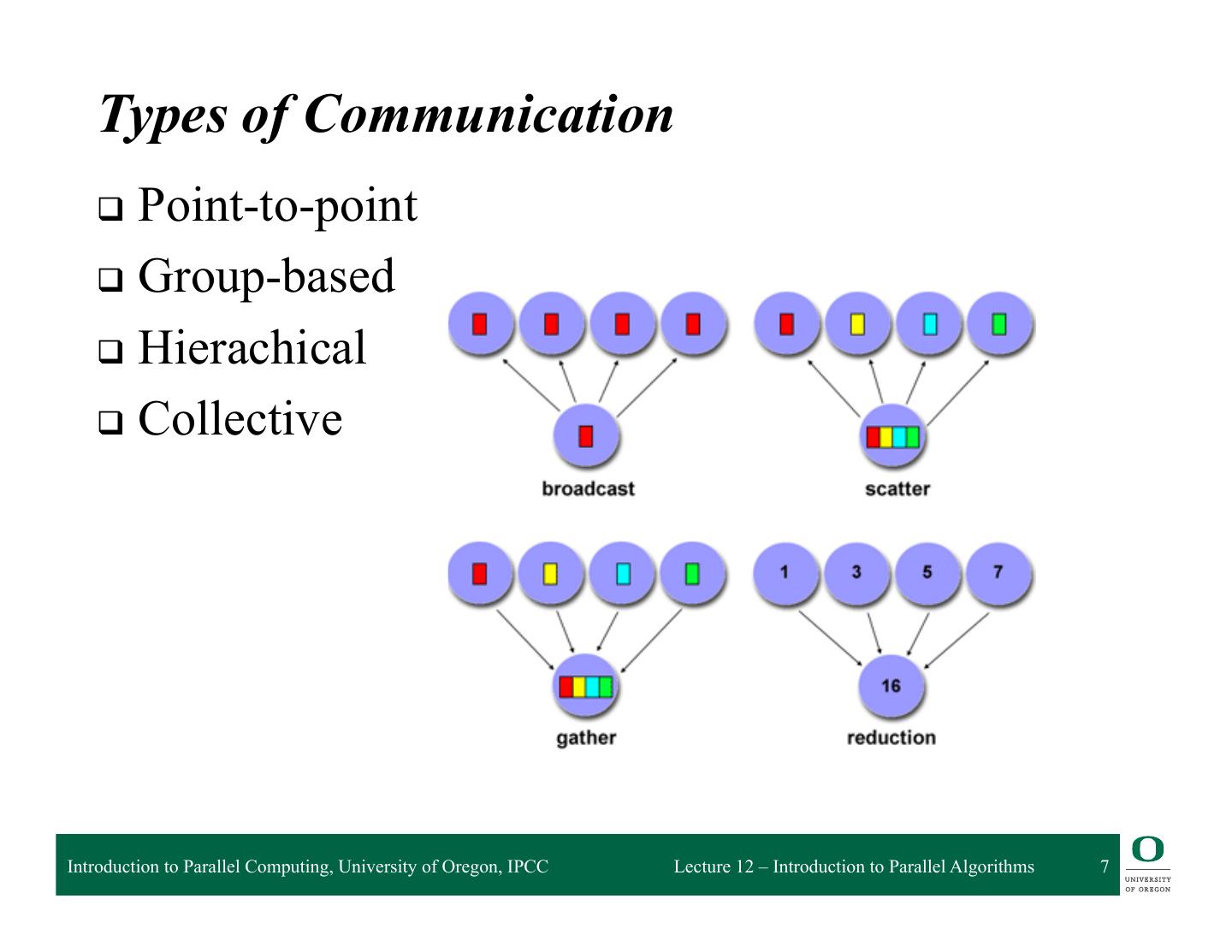
7 . Types of Communication q Point-to-point q Group-based q Hierachical q Collective Introduction to Parallel Computing, University of Oregon, IPCC Lecture 12 – Introduction to Parallel Algorithms 7
8 . Communication Design Checklist q Is the distribution of communications equal? ❍ Unbalanced communication may limit scalability q What is the communication locality? ❍ Wider communication locales are more expensive q What is the degree of communication concurrency? ❍ Communication operations may be parallelized q Is computation associated with different tasks able to proceed concurrently? Can communication be overlapped with computation? ❍ Try to reorder computation and communication to expose opportunities for parallelism Introduction to Parallel Computing, University of Oregon, IPCC Lecture 12 – Introduction to Parallel Algorithms 8
9 . Agglomeration q Move from parallel abstractions to real implementation q Revisit partitioning and communication ❍ View to efficient algorithm execution q Is it useful to agglomerate? ❍ What happens when tasks are combined? q Is it useful to replicate data and/or computation? q Changes important algorithm and performance ratios ❍ Surface-to-volume: reduction in communication at the expense of decreasing parallelism ❍ Communication/computation: which cost dominates q Replication may allow reduction in communication q Maintain flexibility to allow overlap Introduction to Parallel Computing, University of Oregon, IPCC Lecture 12 – Introduction to Parallel Algorithms 9
10 . Types of Agglomeration q Element to column q Element to block ❍ Better surface to volume q Task merging q Task reduction ❍ Reduces communication Introduction to Parallel Computing, University of Oregon, IPCC Lecture 12 – Introduction to Parallel Algorithms 10
11 . Agglomeration Design Checklist q Has increased locality reduced communication costs? q Is replicated computation worth it? q Does data replication compromise scalability? q Is the computation still balanced? q Is scalability in problem size still possible? q Is there still sufficient concurrency? q Is there room for more agglomeration? q Fine-grained vs. coarse-grained? Introduction to Parallel Computing, University of Oregon, IPCC Lecture 12 – Introduction to Parallel Algorithms 11
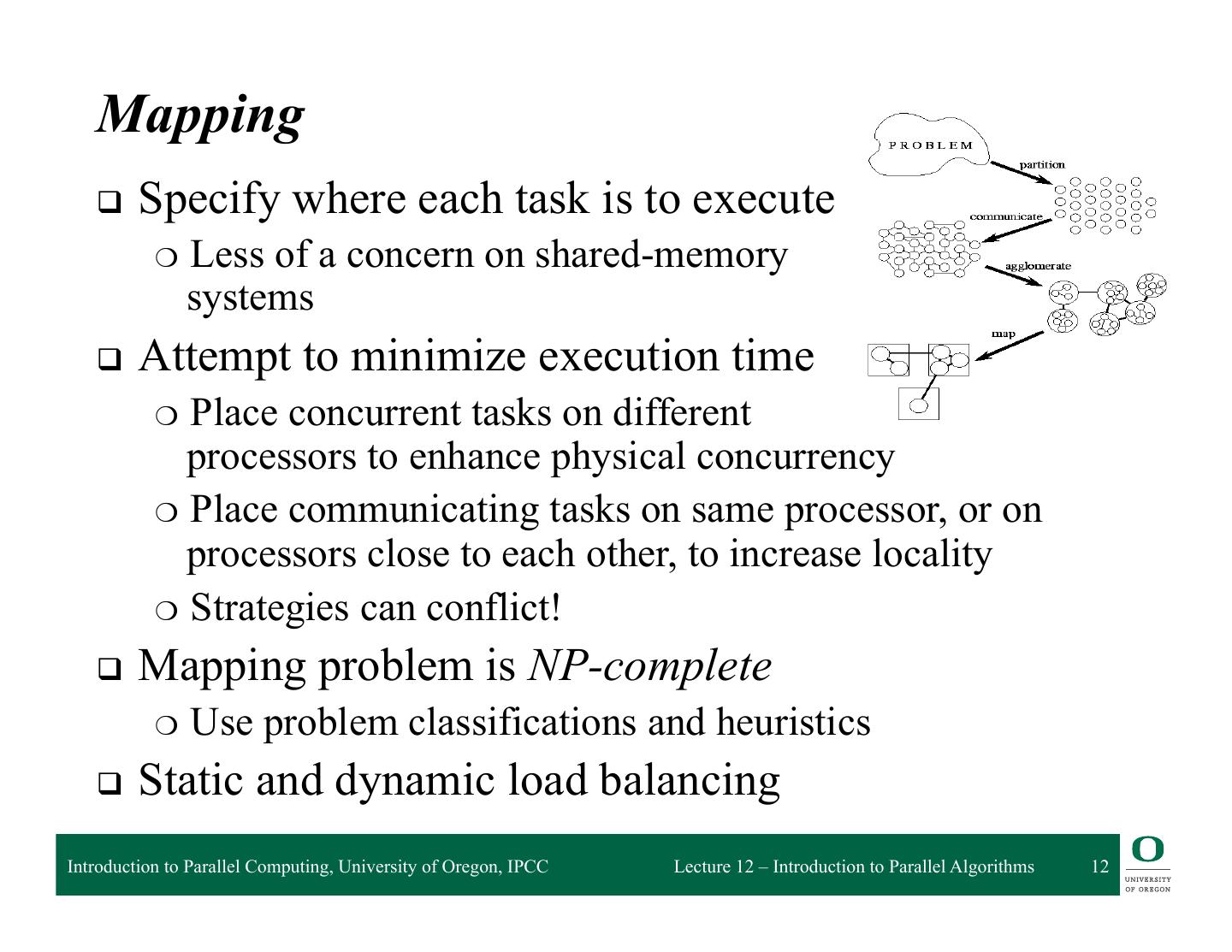
12 . Mapping q Specify where each task is to execute ❍ Less of a concern on shared-memory systems q Attempt to minimize execution time ❍ Place concurrent tasks on different processors to enhance physical concurrency ❍ Place communicating tasks on same processor, or on processors close to each other, to increase locality ❍ Strategies can conflict! q Mapping problem is NP-complete ❍ Use problem classifications and heuristics q Static and dynamic load balancing Introduction to Parallel Computing, University of Oregon, IPCC Lecture 12 – Introduction to Parallel Algorithms 12
13 . Mapping Algorithms q Load balancing (partitioning) algorithms q Data-based algorithms ❍ Think of computational load with respect to amount of data being operated on ❍ Assign data (i.e., work) in some known manner to balance ❍ Take into account data interactions q Task-based (task scheduling) algorithms ❍ Used when functional decomposition yields many tasks with weak locality requirements ❍ Use task assignment to keep processors busy computing ❍ Consider centralized and decentralize schemes Introduction to Parallel Computing, University of Oregon, IPCC Lecture 12 – Introduction to Parallel Algorithms 13
14 . Mapping Design Checklist q Is static mapping too restrictive and non- responsive? q Is dynamic mapping too costly in overhead? q Does centralized scheduling lead to bottlenecks? q Do dynamic load-balancing schemes require too much coordination to re-balance the load? q What is the tradeoff of dynamic scheduling complexity versus performance improvement? q Are there enough tasks to achieve high levels of concurrency? If not, processors may idle. Introduction to Parallel Computing, University of Oregon, IPCC Lecture 12 – Introduction to Parallel Algorithms 14
15 . Types of Parallel Programs q Flavors of parallelism ❍ Data parallelism ◆ all processors do same thing on different data ❍ Task parallelism ◆ processors are assigned tasks that do different things q Parallel execution models ❍ Data parallel ❍ Pipelining (Producer-Consumer) ❍ Task graph ❍ Work pool ❍ Master-Worker Introduction to Parallel Computing, University of Oregon, IPCC Lecture 12 – Introduction to Parallel Algorithms 15
16 . Data Parallel q Data is decomposed (mapped) onto processors q Processors performance similar (identical) tasks on data q Tasks are applied concurrently q Load balance is obtained through data partitioning ❍ Equal amounts of work assigned q Certainly may have interactions between processors q Data parallelism scalability ❍ Degree of parallelism tends to increase with problem size ❍ Makes data parallel algorithms more efficient q Single Program Multiple Data (SPMD) ❍ Convenient way to implement data parallel computation ❍ More associated with distributed memory parallel execution Introduction to Parallel Computing, University of Oregon, IPCC Lecture 12 – Introduction to Parallel Algorithms 16
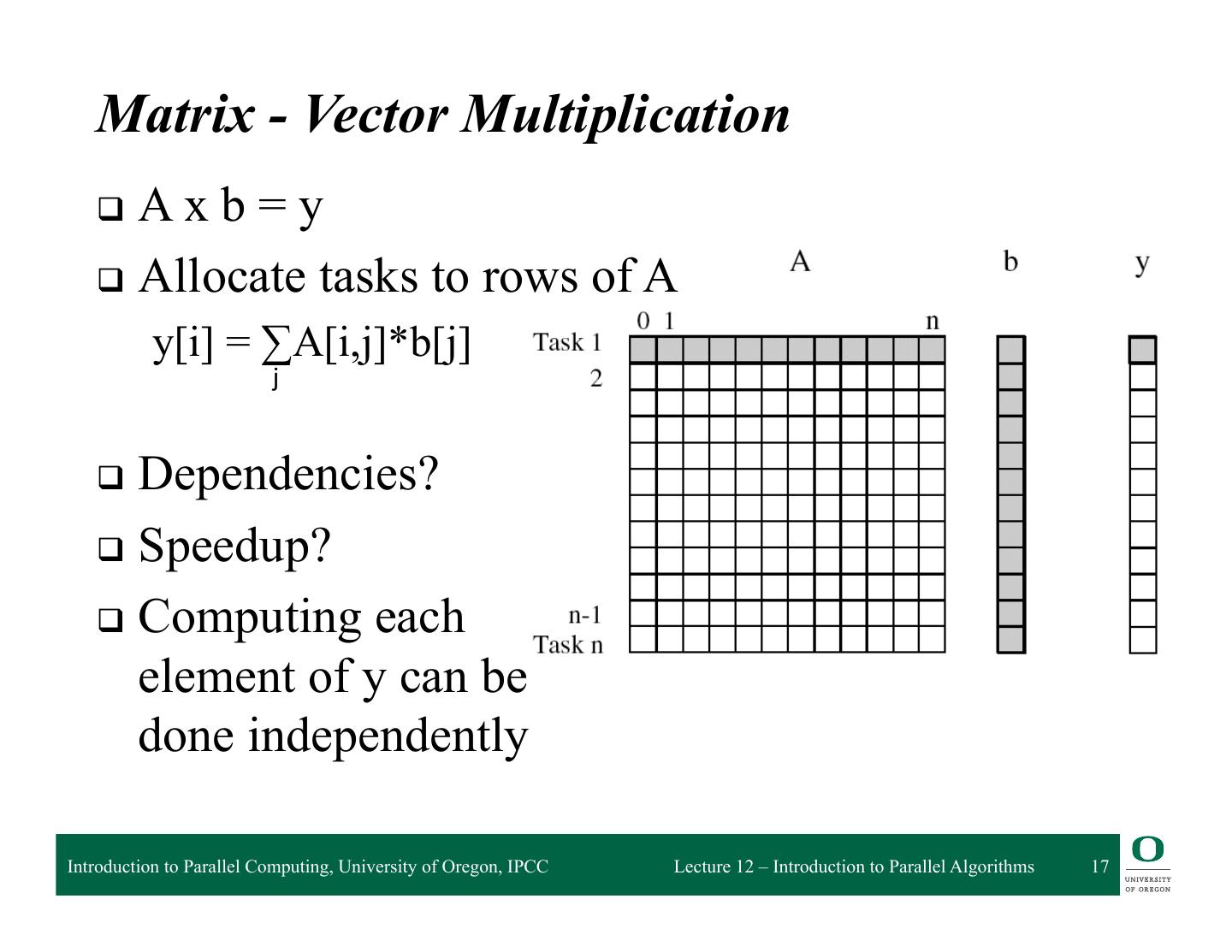
17 . Matrix - Vector Multiplication q A xb=y q Allocate tasks to rows of A y[i] = ∑A[i,j]*b[j] j q Dependencies? q Speedup? q Computing each element of y can be done independently Introduction to Parallel Computing, University of Oregon, IPCC Lecture 12 – Introduction to Parallel Algorithms 17
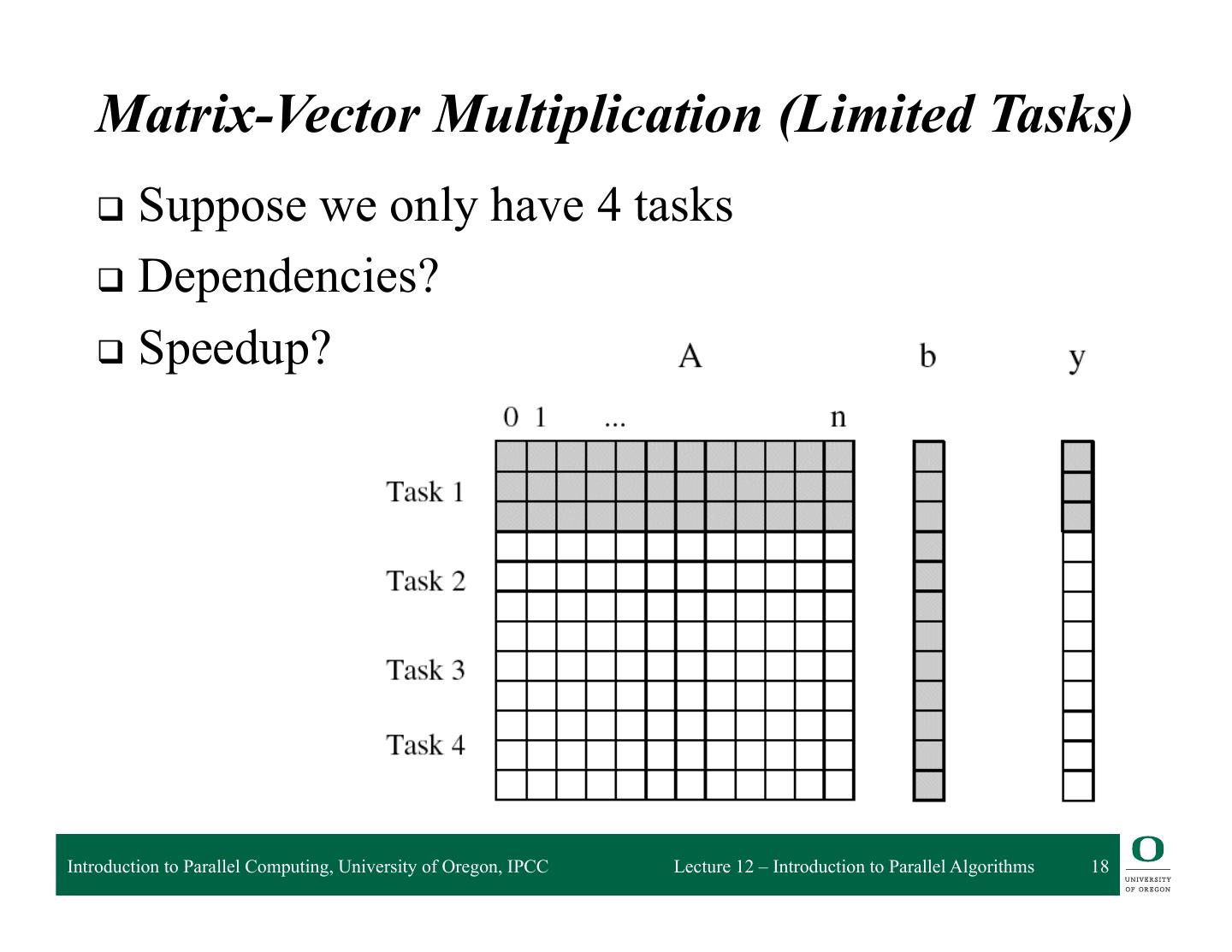
18 . Matrix-Vector Multiplication (Limited Tasks) q Supposewe only have 4 tasks q Dependencies? q Speedup? Introduction to Parallel Computing, University of Oregon, IPCC Lecture 12 – Introduction to Parallel Algorithms 18
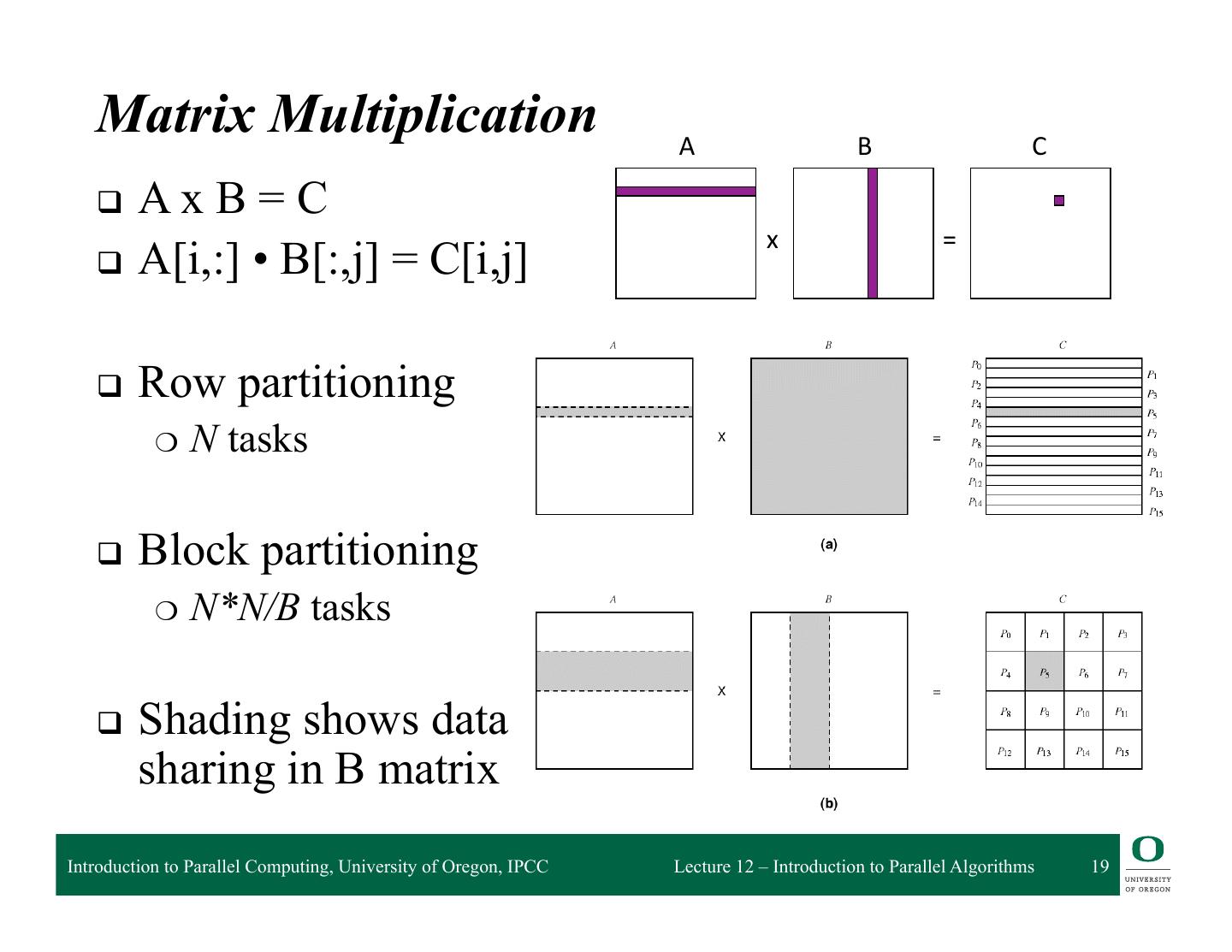
19 . Matrix Multiplication A B C q AxB=C x = q A[i,:] • B[:,j] = C[i,j] q Row partitioning ❍ N tasks q Block partitioning ❍ N*N/B tasks q Shading shows data sharing in B matrix Introduction to Parallel Computing, University of Oregon, IPCC Lecture 12 – Introduction to Parallel Algorithms 19
20 . Granularity of Task and Data Decompositions q Granularity can be with respect to tasks and data q Task granularity ❍ Equivalent to choosing the number of tasks ❍ Fine-grained decomposition results in large # tasks ❍ Large-grained decomposition has smaller # tasks ❍ Translates to data granularity after # tasks chosen ◆ consider matrix multiplication q Data granularity ❍ Think of in terms of amount of data needed in operation ❍ Relative to data as a whole ❍ Decomposition decisions based on input, output, input- output, or intermediate data Introduction to Parallel Computing, University of Oregon, IPCC Lecture 12 – Introduction to Parallel Algorithms 20
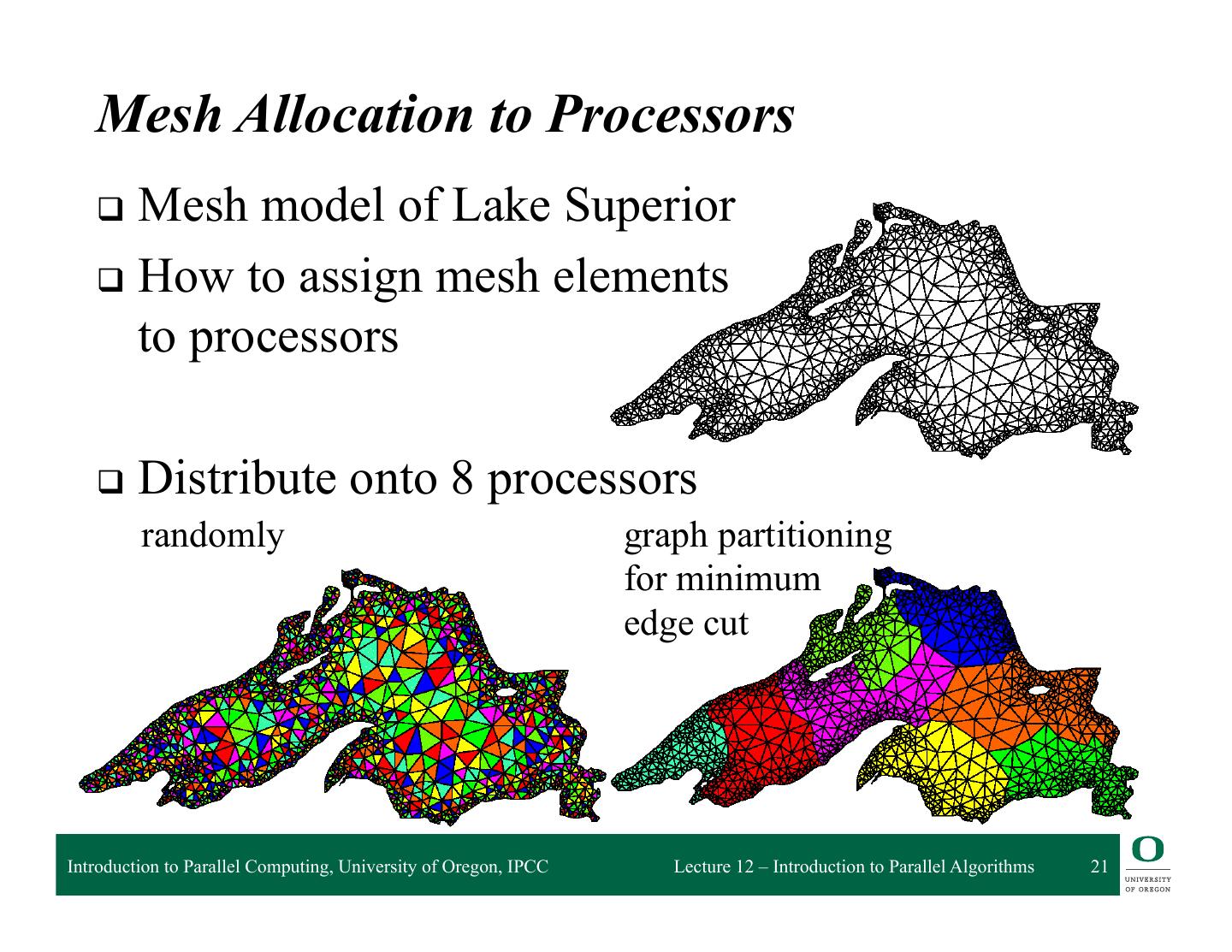
21 . Mesh Allocation to Processors q Mesh model of Lake Superior q How to assign mesh elements to processors q Distribute onto 8 processors randomly graph partitioning for minimum edge cut Introduction to Parallel Computing, University of Oregon, IPCC Lecture 12 – Introduction to Parallel Algorithms 21
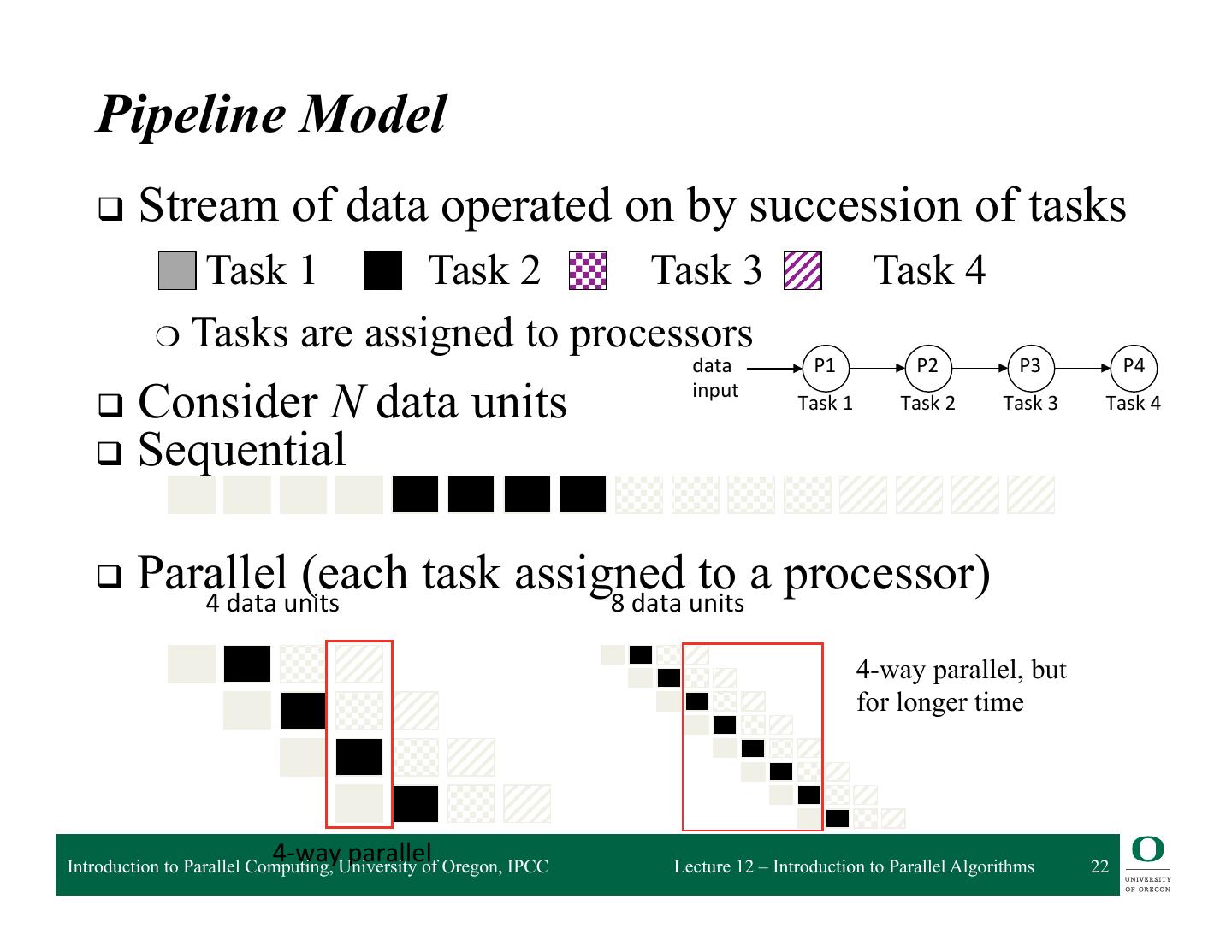
22 . Pipeline Model q Stream of data operated on by succession of tasks Task 1 Task 2 Task 3 Task 4 ❍ Tasks are assigned to processors data P1 P2 P3 P4 q Consider N data units input Task 1 Task 2 Task 3 Task 4 q Sequential q Parallel (each task assigned to a processor) 4 data units 8 data units 4-way parallel, but for longer time 4-‐way parallel Introduction to Parallel Computing, University of Oregon, IPCC Lecture 12 – Introduction to Parallel Algorithms 22
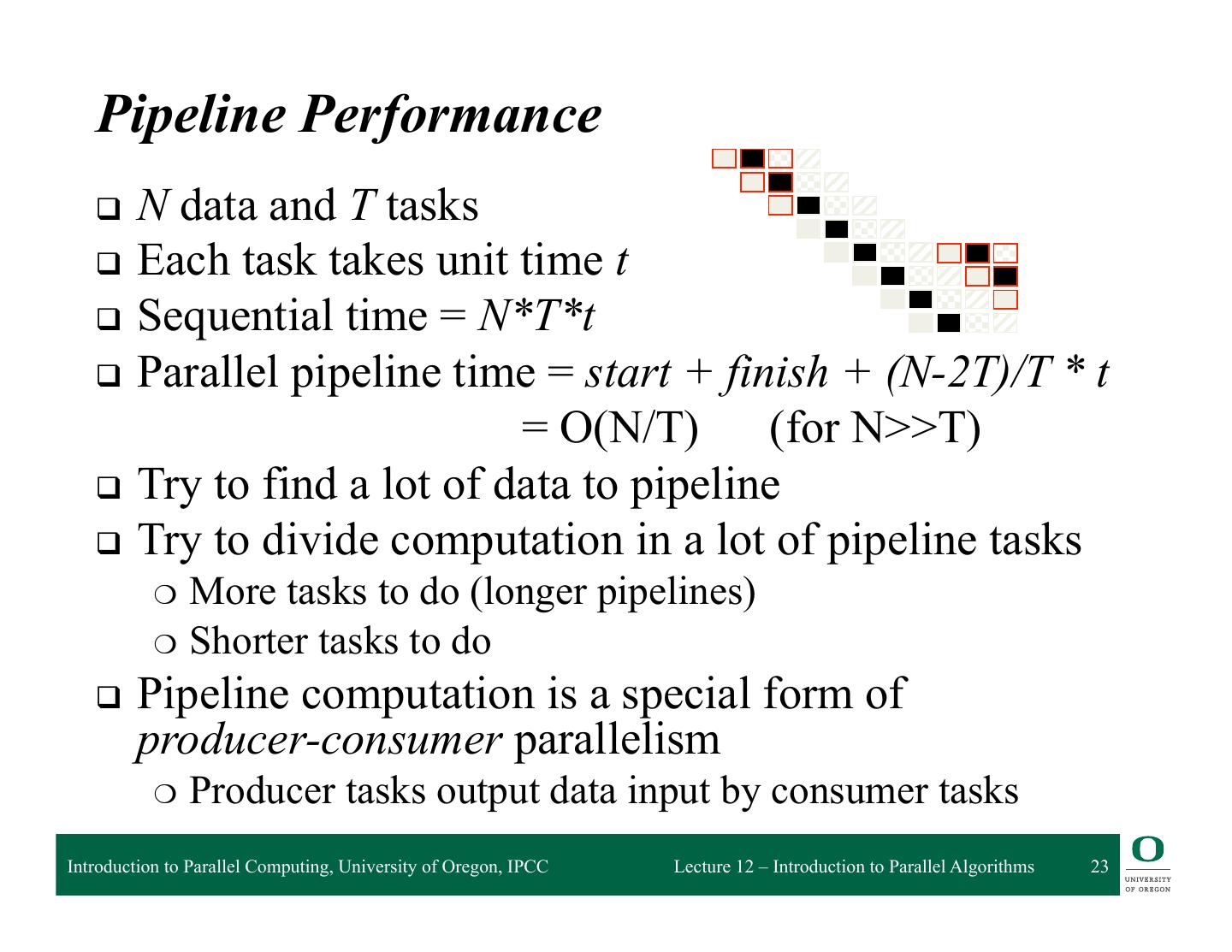
23 . Pipeline Performance q N data and T tasks q Each task takes unit time t q Sequential time = N*T*t q Parallel pipeline time = start + finish + (N-2T)/T * t = O(N/T) (for N>>T) q Try to find a lot of data to pipeline q Try to divide computation in a lot of pipeline tasks ❍ More tasks to do (longer pipelines) ❍ Shorter tasks to do q Pipeline computation is a special form of producer-consumer parallelism ❍ Producer tasks output data input by consumer tasks Introduction to Parallel Computing, University of Oregon, IPCC Lecture 12 – Introduction to Parallel Algorithms 23
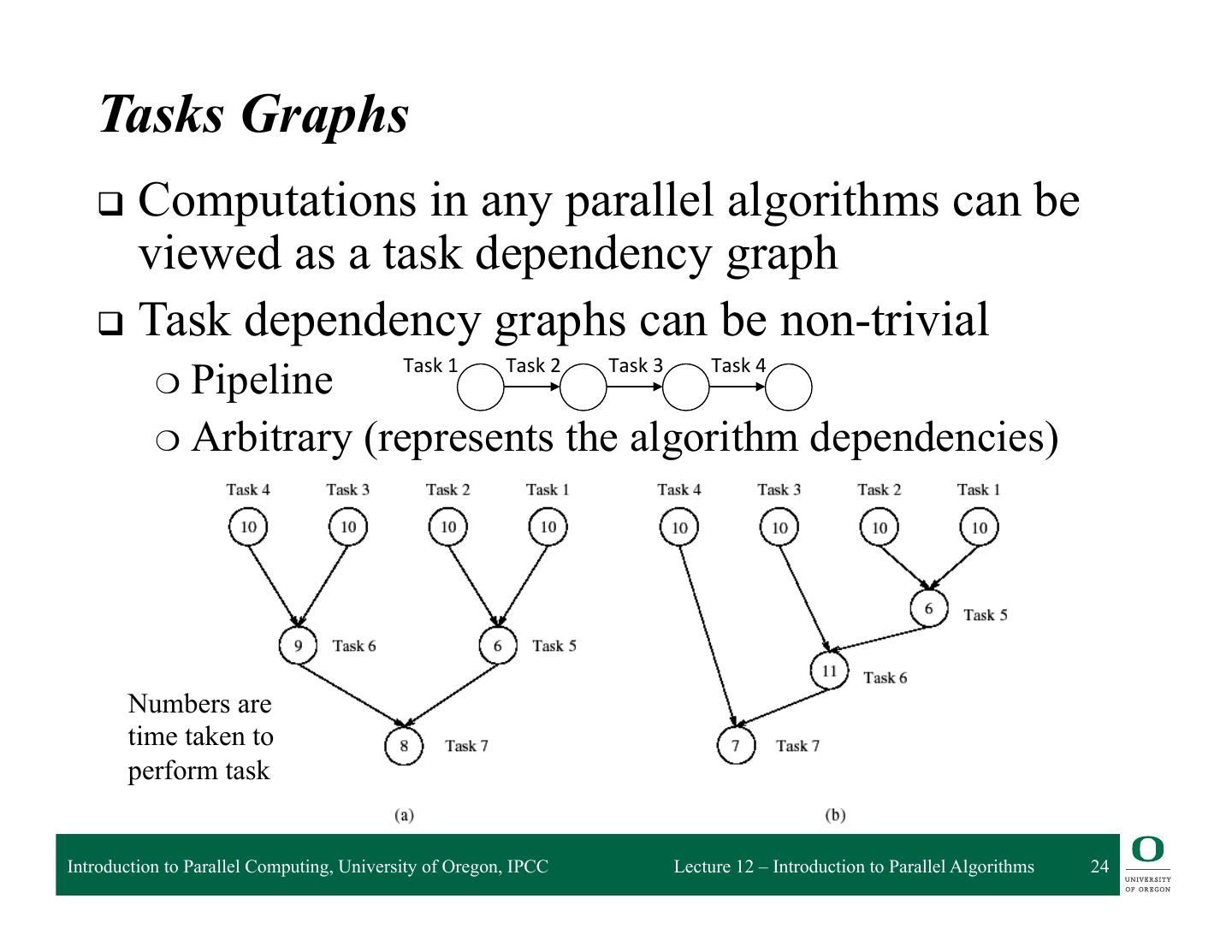
24 . Tasks Graphs q Computations in any parallel algorithms can be viewed as a task dependency graph q Task dependency graphs can be non-trivial Task 1 Task 2 Task 3 Task 4 ❍ Pipeline ❍ Arbitrary (represents the algorithm dependencies) Numbers are time taken to perform task Introduction to Parallel Computing, University of Oregon, IPCC Lecture 12 – Introduction to Parallel Algorithms 24
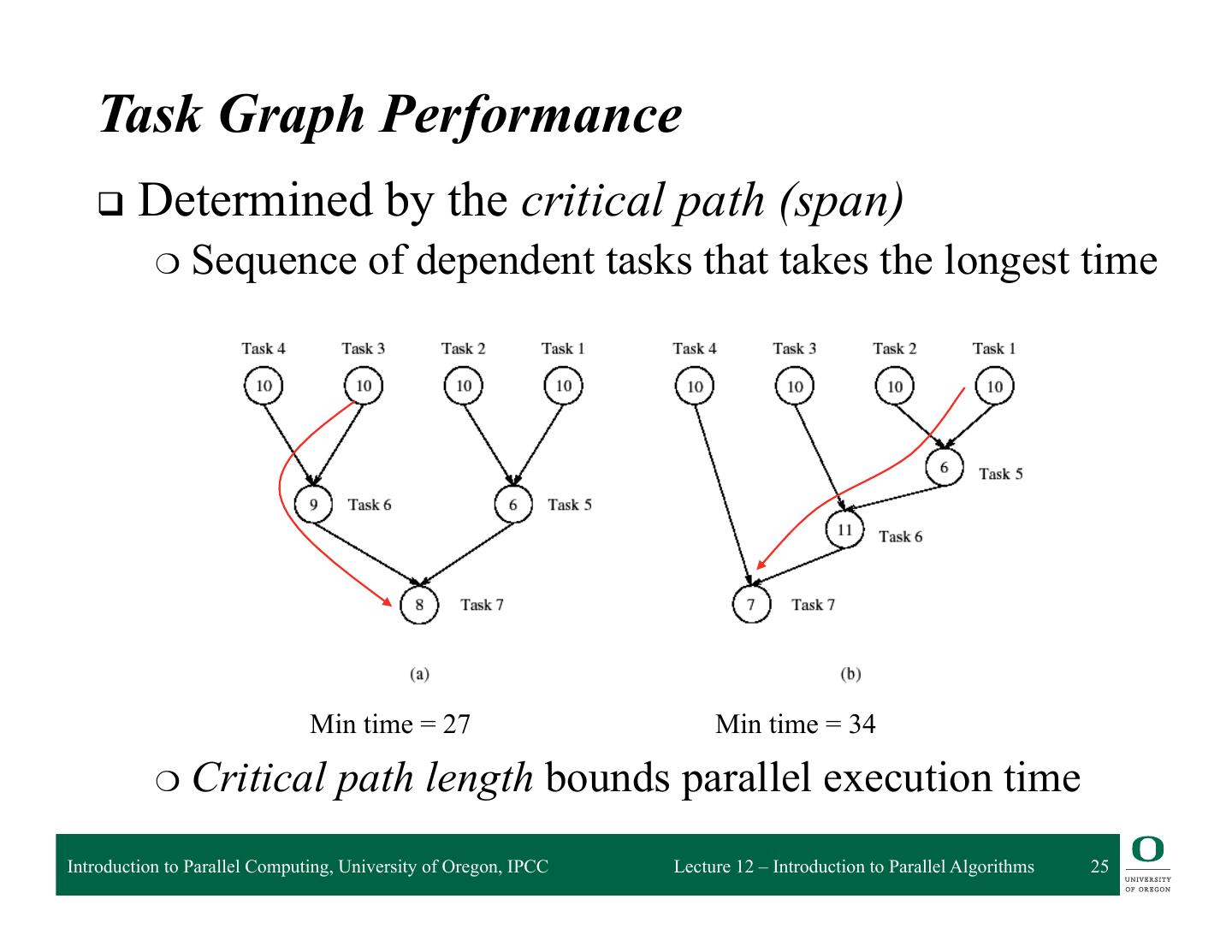
25 . Task Graph Performance q Determined by the critical path (span) ❍ Sequence of dependent tasks that takes the longest time Min time = 27 Min time = 34 ❍ Critical path length bounds parallel execution time Introduction to Parallel Computing, University of Oregon, IPCC Lecture 12 – Introduction to Parallel Algorithms 25
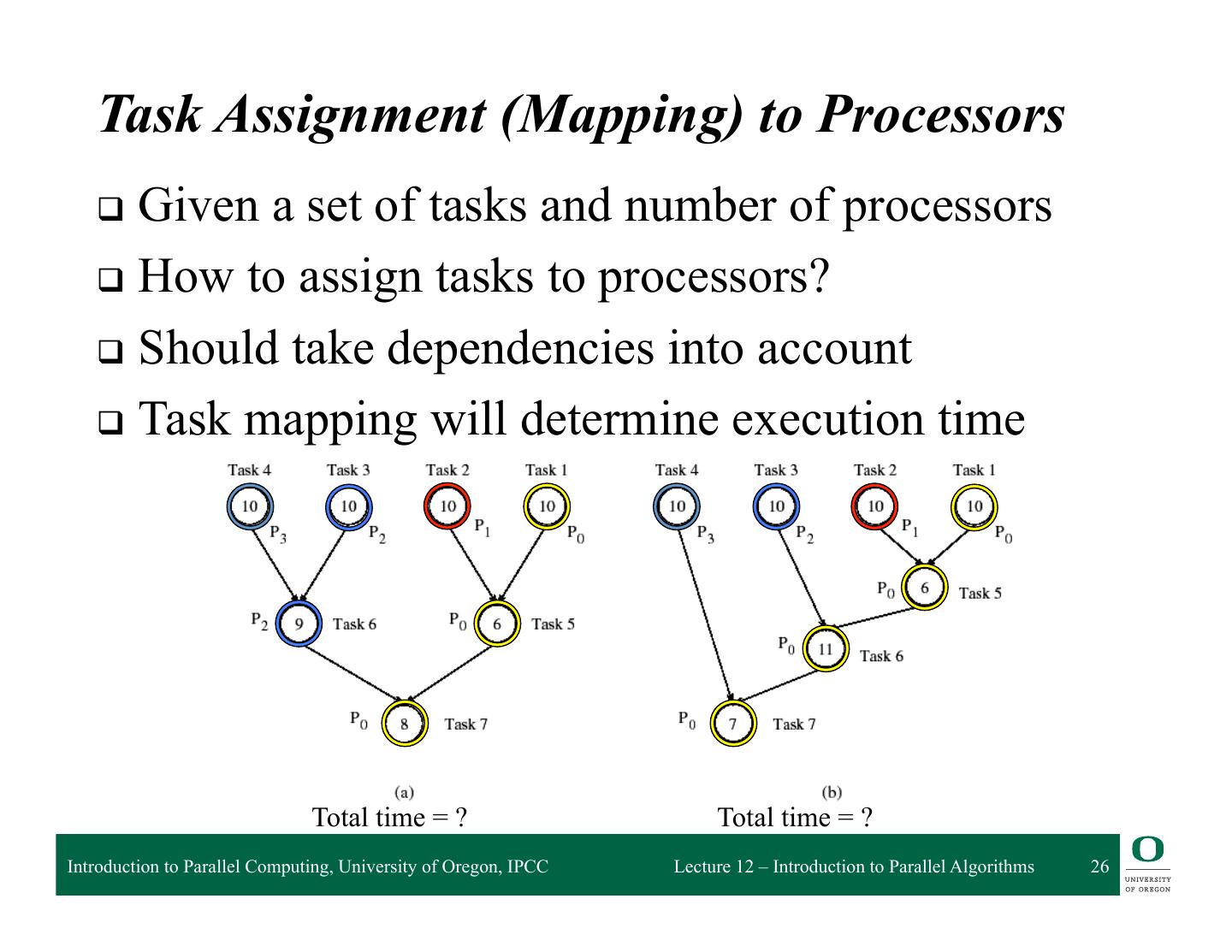
26 . Task Assignment (Mapping) to Processors q Given a set of tasks and number of processors q How to assign tasks to processors? q Should take dependencies into account q Task mapping will determine execution time Total time = ? Total time = ? Introduction to Parallel Computing, University of Oregon, IPCC Lecture 12 – Introduction to Parallel Algorithms 26
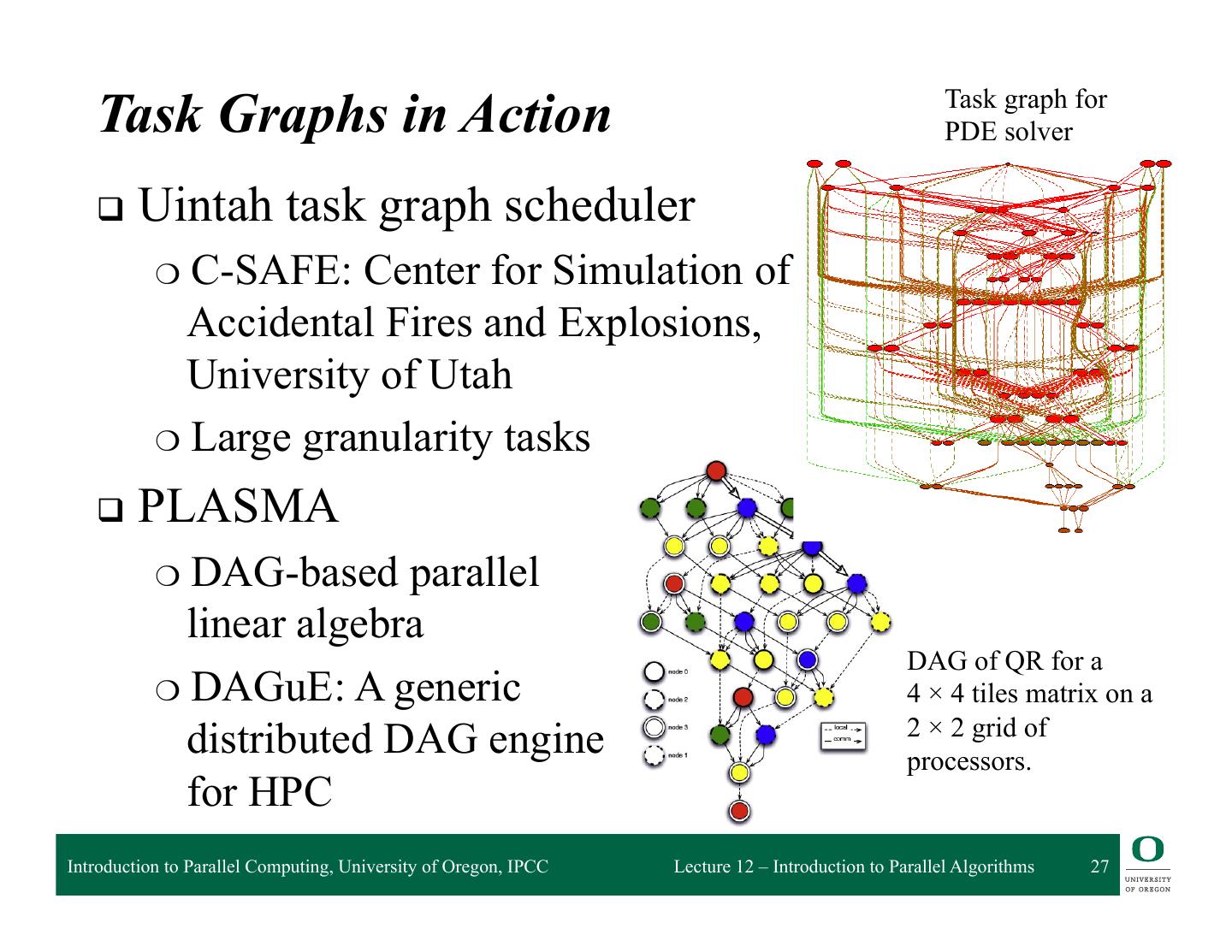
27 . Uintah Taskgraph basedTask PDE Solver Task Graphs in Action graph for PDE solver q Uintah task graph scheduler V. ❍ C-SAFE: Center for Simulation of L. Accidental Fires and Explosions, S University of Utah K. ❍ Large granularity tasks J. An q PLASMA ❍ DAG-based parallel Wasatch Taskgraph linear algebra DAG of QR for a ❍ DAGuE: A generic 4 × 4 tiles matrix on a 2 × 2 grid of distributed DAG engine processors. for HPC Introduction to Parallel Computing, University of Oregon, IPCC Lecture 12 – Introduction to Parallel Algorithms 27
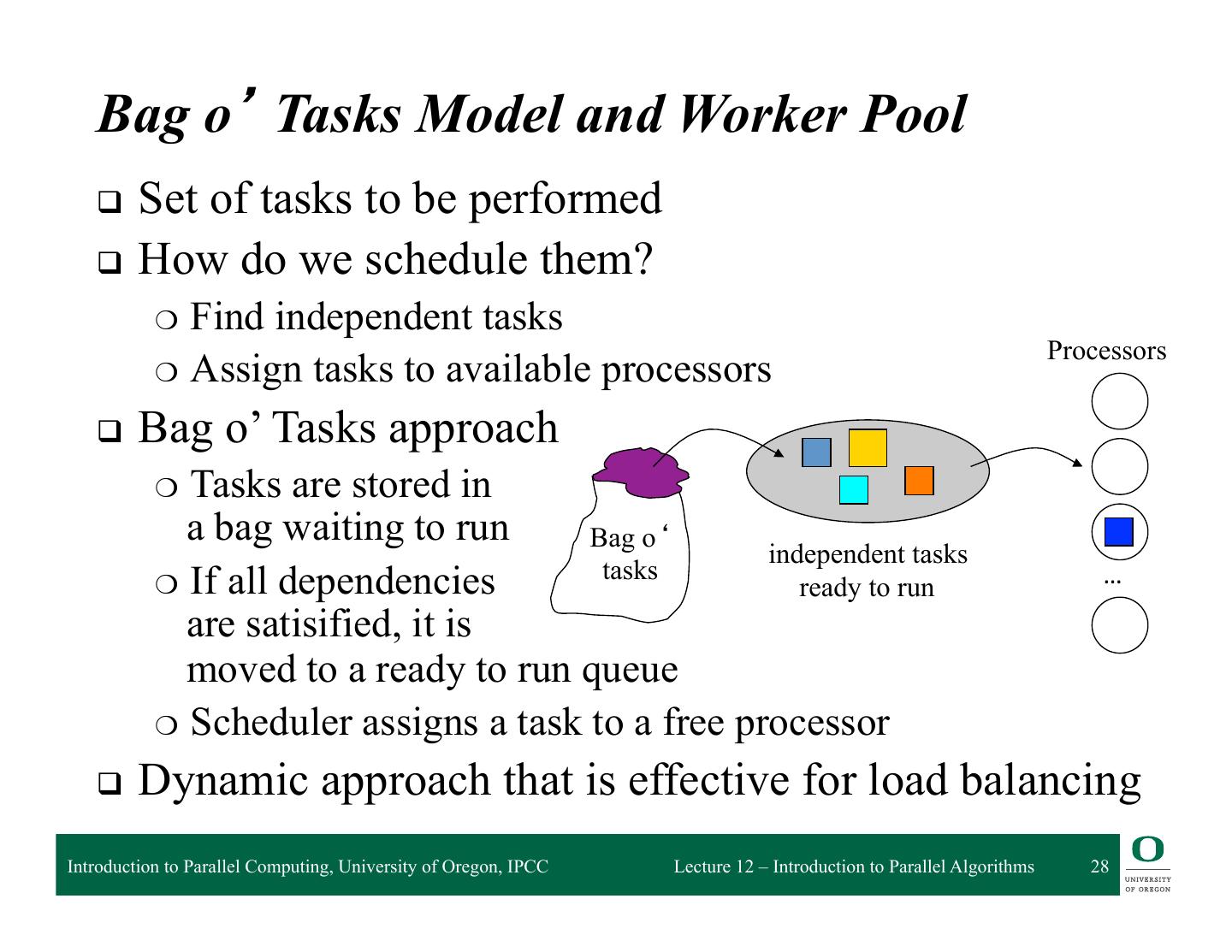
28 . Bag o’ Tasks Model and Worker Pool q Set of tasks to be performed q How do we schedule them? ❍ Find independent tasks Processors ❍ Assign tasks to available processors q Bag o’ Tasks approach ❍ Tasks are stored in a bag waiting to run Bag o‘ independent tasks tasks … ❍ If all dependencies ready to run are satisified, it is moved to a ready to run queue ❍ Scheduler assigns a task to a free processor q Dynamic approach that is effective for load balancing Introduction to Parallel Computing, University of Oregon, IPCC Lecture 12 – Introduction to Parallel Algorithms 28
29 . Master-Worker Parallelism q One or more master processes generate work q Masters allocate work to worker processes q Workers idle if have nothing to do q Workers are mostly stupid and must be told what to do ❍ Execute independently ❍ May need to synchronize, but most be told to do so q Master may become the bottleneck if not careful q What are the performance factors and expected performance behavior ❍ Consider task granularity and asynchrony ❍ How do they interact? Introduction to Parallel Computing, University of Oregon, IPCC Lecture 12 – Introduction to Parallel Algorithms 29
3秒后跳转登录页面
去登陆

