











- 快召唤伙伴们来围观吧
- 微博 QQ QQ空间 贴吧
- 文档嵌入链接
- 复制
- 微信扫一扫分享
- 已成功复制到剪贴板
You Only Look Once: Unified, Real-Time Object Detection
We present YOLO, a new approach to object detection.Prior work on object detection repurposes classifiers to perform detection. Instead, we frame object detection as a regression problem to spatially separated bounding boxes and associated class probabilities. A single neural network predicts bounding boxes and class probabilities directly from full images in one evaluation. Since the whole detection pipeline is a single network, it can be optimized end-to-end directly on detection performance. Our unified architecture is extremely fast. Our base YOLO model processes images in real-time at 45 frames per second. A smaller version of the network, Fast YOLO, processes an astounding 155 frames per second while still achieving double the mAP of other real-time detectors. Compared to state-of-the-art detection systems, YOLO makes more localization errors but is less likely to predict false positives on background. Finally, YOLO learns very general representations of objects. It outperforms other detection methods, including DPM and R-CNN, when generalizing from natural images to other domains like artwork.
展开查看详情
1 . You Only Look Once: Unified, Real-Time Object Detection Joseph Redmon∗ , Santosh Divvala∗† , Ross Girshick¶ , Ali Farhadi∗† University of Washington∗ , Allen Institute for AI† , Facebook AI Research¶ http://pjreddie.com/yolo/ Abstract Person: 0.64 arXiv:1506.02640v5 [cs.CV] 9 May 2016 Horse: 0.28 We present YOLO, a new approach to object detection. Dog: 0.30 1. Resize image. Prior work on object detection repurposes classifiers to per- 2. Run convolutional network. 3. Non-max suppression. form detection. Instead, we frame object detection as a re- gression problem to spatially separated bounding boxes and associated class probabilities. A single neural network pre- Figure 1: The YOLO Detection System. Processing images dicts bounding boxes and class probabilities directly from with YOLO is simple and straightforward. Our system (1) resizes full images in one evaluation. Since the whole detection the input image to 448 × 448, (2) runs a single convolutional net- pipeline is a single network, it can be optimized end-to-end work on the image, and (3) thresholds the resulting detections by directly on detection performance. the model’s confidence. Our unified architecture is extremely fast. Our base YOLO model processes images in real-time at 45 frames methods to first generate potential bounding boxes in an im- per second. A smaller version of the network, Fast YOLO, age and then run a classifier on these proposed boxes. After processes an astounding 155 frames per second while classification, post-processing is used to refine the bound- still achieving double the mAP of other real-time detec- ing boxes, eliminate duplicate detections, and rescore the tors. Compared to state-of-the-art detection systems, YOLO boxes based on other objects in the scene [13]. These com- makes more localization errors but is less likely to predict plex pipelines are slow and hard to optimize because each false positives on background. Finally, YOLO learns very individual component must be trained separately. general representations of objects. It outperforms other de- tection methods, including DPM and R-CNN, when gener- We reframe object detection as a single regression prob- alizing from natural images to other domains like artwork. lem, straight from image pixels to bounding box coordi- nates and class probabilities. Using our system, you only look once (YOLO) at an image to predict what objects are present and where they are. YOLO is refreshingly simple: see Figure 1. A sin- 1. Introduction gle convolutional network simultaneously predicts multi- Humans glance at an image and instantly know what ob- ple bounding boxes and class probabilities for those boxes. jects are in the image, where they are, and how they inter- YOLO trains on full images and directly optimizes detec- act. The human visual system is fast and accurate, allow- tion performance. This unified model has several benefits ing us to perform complex tasks like driving with little con- over traditional methods of object detection. scious thought. Fast, accurate algorithms for object detec- First, YOLO is extremely fast. Since we frame detection tion would allow computers to drive cars without special- as a regression problem we don’t need a complex pipeline. ized sensors, enable assistive devices to convey real-time We simply run our neural network on a new image at test scene information to human users, and unlock the potential time to predict detections. Our base network runs at 45 for general purpose, responsive robotic systems. frames per second with no batch processing on a Titan X Current detection systems repurpose classifiers to per- GPU and a fast version runs at more than 150 fps. This form detection. To detect an object, these systems take a means we can process streaming video in real-time with classifier for that object and evaluate it at various locations less than 25 milliseconds of latency. Furthermore, YOLO and scales in a test image. Systems like deformable parts achieves more than twice the mean average precision of models (DPM) use a sliding window approach where the other real-time systems. For a demo of our system running classifier is run at evenly spaced locations over the entire in real-time on a webcam please see our project webpage: image [10]. http://pjreddie.com/yolo/. More recent approaches like R-CNN use region proposal Second, YOLO reasons globally about the image when 1
2 .making predictions. Unlike sliding window and region one set of class probabilities per grid cell, regardless of the proposal-based techniques, YOLO sees the entire image number of boxes B. during training and test time so it implicitly encodes contex- At test time we multiply the conditional class probabili- tual information about classes as well as their appearance. ties and the individual box confidence predictions, Fast R-CNN, a top detection method [14], mistakes back- truth truth Pr(Classi |Object) ∗ Pr(Object) ∗ IOUpred = Pr(Classi ) ∗ IOUpred (1) ground patches in an image for objects because it can’t see the larger context. YOLO makes less than half the number which gives us class-specific confidence scores for each of background errors compared to Fast R-CNN. box. These scores encode both the probability of that class Third, YOLO learns generalizable representations of ob- appearing in the box and how well the predicted box fits the jects. When trained on natural images and tested on art- object. work, YOLO outperforms top detection methods like DPM and R-CNN by a wide margin. Since YOLO is highly gen- eralizable it is less likely to break down when applied to new domains or unexpected inputs. YOLO still lags behind state-of-the-art detection systems in accuracy. While it can quickly identify objects in im- ages it struggles to precisely localize some objects, espe- Bounding boxes + confidence cially small ones. We examine these tradeoffs further in our experiments. All of our training and testing code is open source. A S × S grid on input Final detections variety of pretrained models are also available to download. 2. Unified Detection Class probability map We unify the separate components of object detection into a single neural network. Our network uses features Figure 2: The Model. Our system models detection as a regres- sion problem. It divides the image into an S × S grid and for each from the entire image to predict each bounding box. It also grid cell predicts B bounding boxes, confidence for those boxes, predicts all bounding boxes across all classes for an im- and C class probabilities. These predictions are encoded as an age simultaneously. This means our network reasons glob- S × S × (B ∗ 5 + C) tensor. ally about the full image and all the objects in the image. The YOLO design enables end-to-end training and real- For evaluating YOLO on PASCAL VOC, we use S = 7, time speeds while maintaining high average precision. B = 2. PASCAL VOC has 20 labelled classes so C = 20. Our system divides the input image into an S × S grid. Our final prediction is a 7 × 7 × 30 tensor. If the center of an object falls into a grid cell, that grid cell is responsible for detecting that object. 2.1. Network Design Each grid cell predicts B bounding boxes and confidence We implement this model as a convolutional neural net- scores for those boxes. These confidence scores reflect how work and evaluate it on the PASCAL VOC detection dataset confident the model is that the box contains an object and [9]. The initial convolutional layers of the network extract also how accurate it thinks the box is that it predicts. For- features from the image while the fully connected layers mally we define confidence as Pr(Object) ∗ IOUtruth pred . If no predict the output probabilities and coordinates. object exists in that cell, the confidence scores should be Our network architecture is inspired by the GoogLeNet zero. Otherwise we want the confidence score to equal the model for image classification [34]. Our network has 24 intersection over union (IOU) between the predicted box convolutional layers followed by 2 fully connected layers. and the ground truth. Instead of the inception modules used by GoogLeNet, we Each bounding box consists of 5 predictions: x, y, w, h, simply use 1 × 1 reduction layers followed by 3 × 3 convo- and confidence. The (x, y) coordinates represent the center lutional layers, similar to Lin et al [22]. The full network is of the box relative to the bounds of the grid cell. The width shown in Figure 3. and height are predicted relative to the whole image. Finally We also train a fast version of YOLO designed to push the confidence prediction represents the IOU between the the boundaries of fast object detection. Fast YOLO uses a predicted box and any ground truth box. neural network with fewer convolutional layers (9 instead Each grid cell also predicts C conditional class proba- of 24) and fewer filters in those layers. Other than the size bilities, Pr(Classi |Object). These probabilities are condi- of the network, all training and testing parameters are the tioned on the grid cell containing an object. We only predict same between YOLO and Fast YOLO.
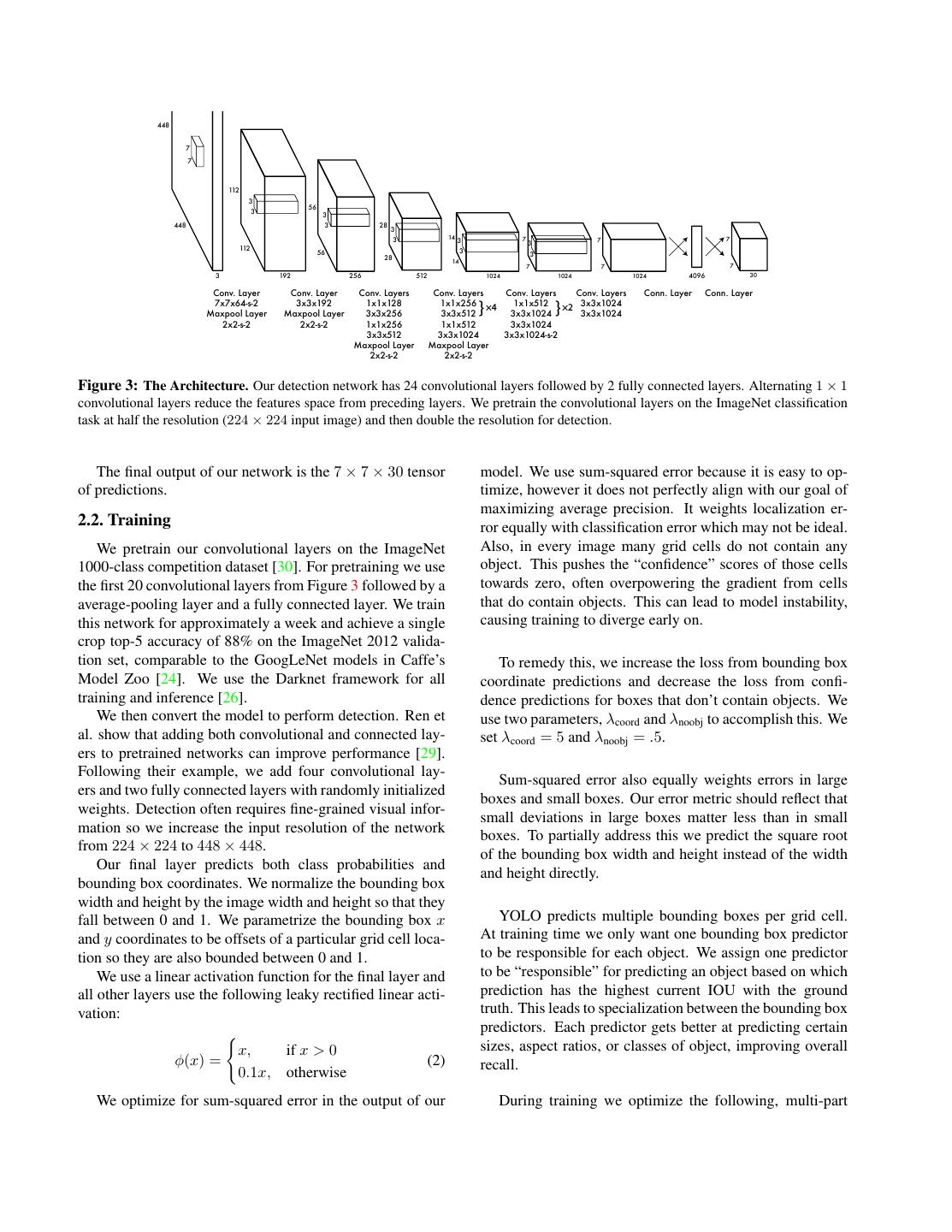
3 . 448 7 7 112 3 56 3 3 448 3 28 3 14 7 7 3 3 7 3 112 3 56 3 28 14 7 7 7 3 192 256 512 1024 1024 1024 4096 30 Conv. Layer Conv. Layer Conv. Layers Conv. Layers Conv. Layers Conv. Layers Conn. Layer Conn. Layer 7x7x64-s-2 Maxpool Layer 3x3x192 Maxpool Layer 1x1x128 3x3x256 1x1x256 ×4 3x3x512 } 1x1x512 3x3x1024 } ×2 3x3x1024 3x3x1024 2x2-s-2 2x2-s-2 1x1x256 1x1x512 3x3x1024 3x3x512 3x3x1024 3x3x1024-s-2 Maxpool Layer Maxpool Layer 2x2-s-2 2x2-s-2 Figure 3: The Architecture. Our detection network has 24 convolutional layers followed by 2 fully connected layers. Alternating 1 × 1 convolutional layers reduce the features space from preceding layers. We pretrain the convolutional layers on the ImageNet classification task at half the resolution (224 × 224 input image) and then double the resolution for detection. The final output of our network is the 7 × 7 × 30 tensor model. We use sum-squared error because it is easy to op- of predictions. timize, however it does not perfectly align with our goal of maximizing average precision. It weights localization er- 2.2. Training ror equally with classification error which may not be ideal. We pretrain our convolutional layers on the ImageNet Also, in every image many grid cells do not contain any 1000-class competition dataset [30]. For pretraining we use object. This pushes the “confidence” scores of those cells the first 20 convolutional layers from Figure 3 followed by a towards zero, often overpowering the gradient from cells average-pooling layer and a fully connected layer. We train that do contain objects. This can lead to model instability, this network for approximately a week and achieve a single causing training to diverge early on. crop top-5 accuracy of 88% on the ImageNet 2012 valida- tion set, comparable to the GoogLeNet models in Caffe’s To remedy this, we increase the loss from bounding box Model Zoo [24]. We use the Darknet framework for all coordinate predictions and decrease the loss from confi- training and inference [26]. dence predictions for boxes that don’t contain objects. We We then convert the model to perform detection. Ren et use two parameters, λcoord and λnoobj to accomplish this. We al. show that adding both convolutional and connected lay- set λcoord = 5 and λnoobj = .5. ers to pretrained networks can improve performance [29]. Following their example, we add four convolutional lay- Sum-squared error also equally weights errors in large ers and two fully connected layers with randomly initialized boxes and small boxes. Our error metric should reflect that weights. Detection often requires fine-grained visual infor- small deviations in large boxes matter less than in small mation so we increase the input resolution of the network boxes. To partially address this we predict the square root from 224 × 224 to 448 × 448. of the bounding box width and height instead of the width Our final layer predicts both class probabilities and and height directly. bounding box coordinates. We normalize the bounding box width and height by the image width and height so that they fall between 0 and 1. We parametrize the bounding box x YOLO predicts multiple bounding boxes per grid cell. and y coordinates to be offsets of a particular grid cell loca- At training time we only want one bounding box predictor tion so they are also bounded between 0 and 1. to be responsible for each object. We assign one predictor We use a linear activation function for the final layer and to be “responsible” for predicting an object based on which all other layers use the following leaky rectified linear acti- prediction has the highest current IOU with the ground vation: truth. This leads to specialization between the bounding box predictors. Each predictor gets better at predicting certain x, if x > 0 sizes, aspect ratios, or classes of object, improving overall φ(x) = (2) recall. 0.1x, otherwise We optimize for sum-squared error in the output of our During training we optimize the following, multi-part
4 .loss function: the border of multiple cells can be well localized by multi- ple cells. Non-maximal suppression can be used to fix these S2 B λcoord ✶obj (xi − x 2 ˆi ) + (yi − yˆi ) 2 multiple detections. While not critical to performance as it ij i=0 j=0 is for R-CNN or DPM, non-maximal suppression adds 2- S2 B √ 2 3% in mAP. ✶obj 2 + λcoord wi − w ˆi + hi − ˆi h ij i=0 j=0 2.4. Limitations of YOLO S2 B ✶obj 2 + ˆi Ci − C ij YOLO imposes strong spatial constraints on bounding i=0 j=0 box predictions since each grid cell only predicts two boxes S2 B ✶noobj 2 + λnoobj ij ˆi Ci − C and can only have one class. This spatial constraint lim- i=0 j=0 its the number of nearby objects that our model can pre- S2 dict. Our model struggles with small objects that appear in + ✶obj i (pi (c) − pˆi (c)) 2 (3) groups, such as flocks of birds. i=0 c∈classes Since our model learns to predict bounding boxes from where ✶obji denotes if object appears in cell i and ✶ij de- obj data, it struggles to generalize to objects in new or unusual notes that the jth bounding box predictor in cell i is “re- aspect ratios or configurations. Our model also uses rela- sponsible” for that prediction. tively coarse features for predicting bounding boxes since Note that the loss function only penalizes classification our architecture has multiple downsampling layers from the error if an object is present in that grid cell (hence the con- input image. ditional class probability discussed earlier). It also only pe- Finally, while we train on a loss function that approxi- nalizes bounding box coordinate error if that predictor is mates detection performance, our loss function treats errors “responsible” for the ground truth box (i.e. has the highest the same in small bounding boxes versus large bounding IOU of any predictor in that grid cell). boxes. A small error in a large box is generally benign but a We train the network for about 135 epochs on the train- small error in a small box has a much greater effect on IOU. ing and validation data sets from PASCAL VOC 2007 and Our main source of error is incorrect localizations. 2012. When testing on 2012 we also include the VOC 2007 test data for training. Throughout training we use a batch 3. Comparison to Other Detection Systems size of 64, a momentum of 0.9 and a decay of 0.0005. Our learning rate schedule is as follows: For the first Object detection is a core problem in computer vision. epochs we slowly raise the learning rate from 10−3 to 10−2 . Detection pipelines generally start by extracting a set of If we start at a high learning rate our model often diverges robust features from input images (Haar [25], SIFT [23], due to unstable gradients. We continue training with 10−2 HOG [4], convolutional features [6]). Then, classifiers for 75 epochs, then 10−3 for 30 epochs, and finally 10−4 [36, 21, 13, 10] or localizers [1, 32] are used to identify for 30 epochs. objects in the feature space. These classifiers or localizers To avoid overfitting we use dropout and extensive data are run either in sliding window fashion over the whole im- augmentation. A dropout layer with rate = .5 after the first age or on some subset of regions in the image [35, 15, 39]. connected layer prevents co-adaptation between layers [18]. We compare the YOLO detection system to several top de- For data augmentation we introduce random scaling and tection frameworks, highlighting key similarities and differ- translations of up to 20% of the original image size. We ences. also randomly adjust the exposure and saturation of the im- Deformable parts models. Deformable parts models age by up to a factor of 1.5 in the HSV color space. (DPM) use a sliding window approach to object detection [10]. DPM uses a disjoint pipeline to extract static features, 2.3. Inference classify regions, predict bounding boxes for high scoring Just like in training, predicting detections for a test image regions, etc. Our system replaces all of these disparate parts only requires one network evaluation. On PASCAL VOC the with a single convolutional neural network. The network network predicts 98 bounding boxes per image and class performs feature extraction, bounding box prediction, non- probabilities for each box. YOLO is extremely fast at test maximal suppression, and contextual reasoning all concur- time since it only requires a single network evaluation, un- rently. Instead of static features, the network trains the fea- like classifier-based methods. tures in-line and optimizes them for the detection task. Our The grid design enforces spatial diversity in the bound- unified architecture leads to a faster, more accurate model ing box predictions. Often it is clear which grid cell an than DPM. object falls in to and the network only predicts one box for R-CNN. R-CNN and its variants use region proposals in- each object. However, some large objects or objects near stead of sliding windows to find objects in images. Selective
5 .Search [35] generates potential bounding boxes, a convolu- grasp detection by Redmon et al [27]. Our grid approach to tional network extracts features, an SVM scores the boxes, a bounding box prediction is based on the MultiGrasp system linear model adjusts the bounding boxes, and non-max sup- for regression to grasps. However, grasp detection is a much pression eliminates duplicate detections. Each stage of this simpler task than object detection. MultiGrasp only needs complex pipeline must be precisely tuned independently to predict a single graspable region for an image containing and the resulting system is very slow, taking more than 40 one object. It doesn’t have to estimate the size, location, seconds per image at test time [14]. or boundaries of the object or predict it’s class, only find a YOLO shares some similarities with R-CNN. Each grid region suitable for grasping. YOLO predicts both bounding cell proposes potential bounding boxes and scores those boxes and class probabilities for multiple objects of multi- boxes using convolutional features. However, our system ple classes in an image. puts spatial constraints on the grid cell proposals which helps mitigate multiple detections of the same object. Our 4. Experiments system also proposes far fewer bounding boxes, only 98 First we compare YOLO with other real-time detection per image compared to about 2000 from Selective Search. systems on PASCAL VOC 2007. To understand the differ- Finally, our system combines these individual components ences between YOLO and R-CNN variants we explore the into a single, jointly optimized model. errors on VOC 2007 made by YOLO and Fast R-CNN, one Other Fast Detectors Fast and Faster R-CNN focus on of the highest performing versions of R-CNN [14]. Based speeding up the R-CNN framework by sharing computa- on the different error profiles we show that YOLO can be tion and using neural networks to propose regions instead used to rescore Fast R-CNN detections and reduce the er- of Selective Search [14] [28]. While they offer speed and rors from background false positives, giving a significant accuracy improvements over R-CNN, both still fall short of performance boost. We also present VOC 2012 results and real-time performance. compare mAP to current state-of-the-art methods. Finally, Many research efforts focus on speeding up the DPM we show that YOLO generalizes to new domains better than pipeline [31] [38] [5]. They speed up HOG computation, other detectors on two artwork datasets. use cascades, and push computation to GPUs. However, only 30Hz DPM [31] actually runs in real-time. 4.1. Comparison to Other Real-Time Systems Instead of trying to optimize individual components of Many research efforts in object detection focus on mak- a large detection pipeline, YOLO throws out the pipeline ing standard detection pipelines fast. [5] [38] [31] [14] [17] entirely and is fast by design. [28] However, only Sadeghi et al. actually produce a de- Detectors for single classes like faces or people can be tection system that runs in real-time (30 frames per second highly optimized since they have to deal with much less or better) [31]. We compare YOLO to their GPU imple- variation [37]. YOLO is a general purpose detector that mentation of DPM which runs either at 30Hz or 100Hz. learns to detect a variety of objects simultaneously. While the other efforts don’t reach the real-time milestone Deep MultiBox. Unlike R-CNN, Szegedy et al. train a we also compare their relative mAP and speed to examine convolutional neural network to predict regions of interest the accuracy-performance tradeoffs available in object de- [8] instead of using Selective Search. MultiBox can also tection systems. perform single object detection by replacing the confidence Fast YOLO is the fastest object detection method on prediction with a single class prediction. However, Multi- PASCAL; as far as we know, it is the fastest extant object Box cannot perform general object detection and is still just detector. With 52.7% mAP, it is more than twice as accurate a piece in a larger detection pipeline, requiring further im- as prior work on real-time detection. YOLO pushes mAP to age patch classification. Both YOLO and MultiBox use a 63.4% while still maintaining real-time performance. convolutional network to predict bounding boxes in an im- We also train YOLO using VGG-16. This model is more age but YOLO is a complete detection system. accurate but also significantly slower than YOLO. It is use- OverFeat. Sermanet et al. train a convolutional neural ful for comparison to other detection systems that rely on network to perform localization and adapt that localizer to VGG-16 but since it is slower than real-time the rest of the perform detection [32]. OverFeat efficiently performs slid- paper focuses on our faster models. ing window detection but it is still a disjoint system. Over- Fastest DPM effectively speeds up DPM without sacri- Feat optimizes for localization, not detection performance. ficing much mAP but it still misses real-time performance Like DPM, the localizer only sees local information when by a factor of 2 [38]. It also is limited by DPM’s relatively making a prediction. OverFeat cannot reason about global low accuracy on detection compared to neural network ap- context and thus requires significant post-processing to pro- proaches. duce coherent detections. R-CNN minus R replaces Selective Search with static MultiGrasp. Our work is similar in design to work on bounding box proposals [20]. While it is much faster than
6 . Real-Time Detectors Train mAP FPS Fast R-CNN YOLO 100Hz DPM [31] 2007 16.0 100 Background: 13.6% Background: 4.75% 30Hz DPM [31] 2007 26.1 30 Other: 4.0% Fast YOLO 2007+2012 52.7 155 Other: 1.9% Sim: 6.75% YOLO 2007+2012 63.4 45 Sim: 4.3% Less Than Real-Time Loc: 8.6% Loc: 19.0% Fastest DPM [38] 2007 30.4 15 R-CNN Minus R [20] 2007 53.5 6 Correct: 71.6% Correct: 65.5% Fast R-CNN [14] 2007+2012 70.0 0.5 Faster R-CNN VGG-16[28] 2007+2012 73.2 7 Faster R-CNN ZF [28] 2007+2012 62.1 18 YOLO VGG-16 2007+2012 66.4 21 Figure 4: Error Analysis: Fast R-CNN vs. YOLO These charts show the percentage of localization and background errors in the top N detections for various categories (N = # objects in that Table 1: Real-Time Systems on PASCAL VOC 2007. Compar- category). ing the performance and speed of fast detectors. Fast YOLO is the fastest detector on record for PASCAL VOC detection and is still twice as accurate as any other real-time detector. YOLO is • Other: class is wrong, IOU > .1 10 mAP more accurate than the fast version while still well above • Background: IOU < .1 for any object real-time in speed. Figure 4 shows the breakdown of each error type aver- aged across all 20 classes. R-CNN, it still falls short of real-time and takes a significant YOLO struggles to localize objects correctly. Localiza- accuracy hit from not having good proposals. tion errors account for more of YOLO’s errors than all other Fast R-CNN speeds up the classification stage of R-CNN sources combined. Fast R-CNN makes much fewer local- but it still relies on selective search which can take around ization errors but far more background errors. 13.6% of 2 seconds per image to generate bounding box proposals. it’s top detections are false positives that don’t contain any Thus it has high mAP but at 0.5 fps it is still far from real- objects. Fast R-CNN is almost 3x more likely to predict time. background detections than YOLO. The recent Faster R-CNN replaces selective search with a neural network to propose bounding boxes, similar to 4.3. Combining Fast R-CNN and YOLO Szegedy et al. [8] In our tests, their most accurate model YOLO makes far fewer background mistakes than Fast achieves 7 fps while a smaller, less accurate one runs at R-CNN. By using YOLO to eliminate background detec- 18 fps. The VGG-16 version of Faster R-CNN is 10 mAP tions from Fast R-CNN we get a significant boost in perfor- higher but is also 6 times slower than YOLO. The Zeiler- mance. For every bounding box that R-CNN predicts we Fergus Faster R-CNN is only 2.5 times slower than YOLO check to see if YOLO predicts a similar box. If it does, we but is also less accurate. give that prediction a boost based on the probability pre- dicted by YOLO and the overlap between the two boxes. 4.2. VOC 2007 Error Analysis The best Fast R-CNN model achieves a mAP of 71.8% To further examine the differences between YOLO and on the VOC 2007 test set. When combined with YOLO, its state-of-the-art detectors, we look at a detailed breakdown of results on VOC 2007. We compare YOLO to Fast R- mAP Combined Gain CNN since Fast R-CNN is one of the highest performing Fast R-CNN 71.8 - - detectors on PASCAL and it’s detections are publicly avail- Fast R-CNN (2007 data) 66.9 72.4 .6 able. Fast R-CNN (VGG-M) 59.2 72.4 .6 We use the methodology and tools of Hoiem et al. [19] Fast R-CNN (CaffeNet) 57.1 72.1 .3 For each category at test time we look at the top N predic- YOLO 63.4 75.0 3.2 tions for that category. Each prediction is either correct or it is classified based on the type of error: Table 2: Model combination experiments on VOC 2007. We • Correct: correct class and IOU > .5 examine the effect of combining various models with the best ver- sion of Fast R-CNN. Other versions of Fast R-CNN provide only • Localization: correct class, .1 < IOU < .5 a small benefit while YOLO provides a significant performance • Similar: class is similar, IOU > .1 boost.
7 .VOC 2012 test mAP aero bike bird boat bottle bus car cat chair cow table dog horse mbike person plant sheep sofa train tv MR CNN MORE DATA [11] 73.9 85.5 82.9 76.6 57.8 62.7 79.4 77.2 86.6 55.0 79.1 62.2 87.0 83.4 84.7 78.9 45.3 73.4 65.8 80.3 74.0 HyperNet VGG 71.4 84.2 78.5 73.6 55.6 53.7 78.7 79.8 87.7 49.6 74.9 52.1 86.0 81.7 83.3 81.8 48.6 73.5 59.4 79.9 65.7 HyperNet SP 71.3 84.1 78.3 73.3 55.5 53.6 78.6 79.6 87.5 49.5 74.9 52.1 85.6 81.6 83.2 81.6 48.4 73.2 59.3 79.7 65.6 Fast R-CNN + YOLO 70.7 83.4 78.5 73.5 55.8 43.4 79.1 73.1 89.4 49.4 75.5 57.0 87.5 80.9 81.0 74.7 41.8 71.5 68.5 82.1 67.2 MR CNN S CNN [11] 70.7 85.0 79.6 71.5 55.3 57.7 76.0 73.9 84.6 50.5 74.3 61.7 85.5 79.9 81.7 76.4 41.0 69.0 61.2 77.7 72.1 Faster R-CNN [28] 70.4 84.9 79.8 74.3 53.9 49.8 77.5 75.9 88.5 45.6 77.1 55.3 86.9 81.7 80.9 79.6 40.1 72.6 60.9 81.2 61.5 DEEP ENS COCO 70.1 84.0 79.4 71.6 51.9 51.1 74.1 72.1 88.6 48.3 73.4 57.8 86.1 80.0 80.7 70.4 46.6 69.6 68.8 75.9 71.4 NoC [29] 68.8 82.8 79.0 71.6 52.3 53.7 74.1 69.0 84.9 46.9 74.3 53.1 85.0 81.3 79.5 72.2 38.9 72.4 59.5 76.7 68.1 Fast R-CNN [14] 68.4 82.3 78.4 70.8 52.3 38.7 77.8 71.6 89.3 44.2 73.0 55.0 87.5 80.5 80.8 72.0 35.1 68.3 65.7 80.4 64.2 UMICH FGS STRUCT 66.4 82.9 76.1 64.1 44.6 49.4 70.3 71.2 84.6 42.7 68.6 55.8 82.7 77.1 79.9 68.7 41.4 69.0 60.0 72.0 66.2 NUS NIN C2000 [7] 63.8 80.2 73.8 61.9 43.7 43.0 70.3 67.6 80.7 41.9 69.7 51.7 78.2 75.2 76.9 65.1 38.6 68.3 58.0 68.7 63.3 BabyLearning [7] 63.2 78.0 74.2 61.3 45.7 42.7 68.2 66.8 80.2 40.6 70.0 49.8 79.0 74.5 77.9 64.0 35.3 67.9 55.7 68.7 62.6 NUS NIN 62.4 77.9 73.1 62.6 39.5 43.3 69.1 66.4 78.9 39.1 68.1 50.0 77.2 71.3 76.1 64.7 38.4 66.9 56.2 66.9 62.7 R-CNN VGG BB [13] 62.4 79.6 72.7 61.9 41.2 41.9 65.9 66.4 84.6 38.5 67.2 46.7 82.0 74.8 76.0 65.2 35.6 65.4 54.2 67.4 60.3 R-CNN VGG [13] 59.2 76.8 70.9 56.6 37.5 36.9 62.9 63.6 81.1 35.7 64.3 43.9 80.4 71.6 74.0 60.0 30.8 63.4 52.0 63.5 58.7 YOLO 57.9 77.0 67.2 57.7 38.3 22.7 68.3 55.9 81.4 36.2 60.8 48.5 77.2 72.3 71.3 63.5 28.9 52.2 54.8 73.9 50.8 Feature Edit [33] 56.3 74.6 69.1 54.4 39.1 33.1 65.2 62.7 69.7 30.8 56.0 44.6 70.0 64.4 71.1 60.2 33.3 61.3 46.4 61.7 57.8 R-CNN BB [13] 53.3 71.8 65.8 52.0 34.1 32.6 59.6 60.0 69.8 27.6 52.0 41.7 69.6 61.3 68.3 57.8 29.6 57.8 40.9 59.3 54.1 SDS [16] 50.7 69.7 58.4 48.5 28.3 28.8 61.3 57.5 70.8 24.1 50.7 35.9 64.9 59.1 65.8 57.1 26.0 58.8 38.6 58.9 50.7 R-CNN [13] 49.6 68.1 63.8 46.1 29.4 27.9 56.6 57.0 65.9 26.5 48.7 39.5 66.2 57.3 65.4 53.2 26.2 54.5 38.1 50.6 51.6 Table 3: PASCAL VOC 2012 Leaderboard. YOLO compared with the full comp4 (outside data allowed) public leaderboard as of November 6th, 2015. Mean average precision and per-class average precision are shown for a variety of detection methods. YOLO is the only real-time detector. Fast R-CNN + YOLO is the forth highest scoring method, with a 2.3% boost over Fast R-CNN. mAP increases by 3.2% to 75.0%. We also tried combining the test data can diverge from what the system has seen be- the top Fast R-CNN model with several other versions of fore [3]. We compare YOLO to other detection systems on Fast R-CNN. Those ensembles produced small increases in the Picasso Dataset [12] and the People-Art Dataset [3], two mAP between .3 and .6%, see Table 2 for details. datasets for testing person detection on artwork. The boost from YOLO is not simply a byproduct of Figure 5 shows comparative performance between model ensembling since there is little benefit from combin- YOLO and other detection methods. For reference, we give ing different versions of Fast R-CNN. Rather, it is precisely VOC 2007 detection AP on person where all models are because YOLO makes different kinds of mistakes at test trained only on VOC 2007 data. On Picasso models are time that it is so effective at boosting Fast R-CNN’s per- trained on VOC 2012 while on People-Art they are trained formance. on VOC 2010. Unfortunately, this combination doesn’t benefit from the R-CNN has high AP on VOC 2007. However, R-CNN speed of YOLO since we run each model seperately and drops off considerably when applied to artwork. R-CNN then combine the results. However, since YOLO is so fast uses Selective Search for bounding box proposals which is it doesn’t add any significant computational time compared tuned for natural images. The classifier step in R-CNN only to Fast R-CNN. sees small regions and needs good proposals. 4.4. VOC 2012 Results DPM maintains its AP well when applied to artwork. Prior work theorizes that DPM performs well because it has On the VOC 2012 test set, YOLO scores 57.9% mAP. strong spatial models of the shape and layout of objects. This is lower than the current state of the art, closer to Though DPM doesn’t degrade as much as R-CNN, it starts the original R-CNN using VGG-16, see Table 3. Our sys- from a lower AP. tem struggles with small objects compared to its closest YOLO has good performance on VOC 2007 and its AP competitors. On categories like bottle, sheep, and degrades less than other methods when applied to artwork. tv/monitor YOLO scores 8-10% lower than R-CNN or Like DPM, YOLO models the size and shape of objects, Feature Edit. However, on other categories like cat and as well as relationships between objects and where objects train YOLO achieves higher performance. commonly appear. Artwork and natural images are very Our combined Fast R-CNN + YOLO model is one of the different on a pixel level but they are similar in terms of highest performing detection methods. Fast R-CNN gets the size and shape of objects, thus YOLO can still predict a 2.3% improvement from the combination with YOLO, good bounding boxes and detections. boosting it 5 spots up on the public leaderboard. 4.5. Generalizability: Person Detection in Artwork 5. Real-Time Detection In The Wild Academic datasets for object detection draw the training YOLO is a fast, accurate object detector, making it ideal and testing data from the same distribution. In real-world for computer vision applications. We connect YOLO to a applications it is hard to predict all possible use cases and webcam and verify that it maintains real-time performance,
8 . Humans YOLO VOC 2007 Picasso People-Art DPM Poselets AP AP Best F1 AP RCNN YOLO 59.2 53.3 0.590 45 R-CNN 54.2 10.4 0.226 26 DPM 43.2 37.8 0.458 32 D&T Poselets [2] 36.5 17.8 0.271 D&T [4] - 1.9 0.051 (b) Quantitative results on the VOC 2007, Picasso, and People-Art Datasets. (a) Picasso Dataset precision-recall curves. The Picasso Dataset evaluates on both AP and best F1 score. Figure 5: Generalization results on Picasso and People-Art datasets. Figure 6: Qualitative Results. YOLO running on sample artwork and natural images from the internet. It is mostly accurate although it does think one person is an airplane. including the time to fetch images from the camera and dis- directly on full images. Unlike classifier-based approaches, play the detections. YOLO is trained on a loss function that directly corresponds The resulting system is interactive and engaging. While to detection performance and the entire model is trained YOLO processes images individually, when attached to a jointly. webcam it functions like a tracking system, detecting ob- Fast YOLO is the fastest general-purpose object detec- jects as they move around and change in appearance. A tor in the literature and YOLO pushes the state-of-the-art in demo of the system and the source code can be found on real-time object detection. YOLO also generalizes well to our project website: http://pjreddie.com/yolo/. new domains making it ideal for applications that rely on fast, robust object detection. 6. Conclusion Acknowledgements: This work is partially supported by We introduce YOLO, a unified model for object detec- ONR N00014-13-1-0720, NSF IIS-1338054, and The Allen tion. Our model is simple to construct and can be trained Distinguished Investigator Award.
9 .References [16] B. Hariharan, P. Arbel´aez, R. Girshick, and J. Malik. Simul- taneous detection and segmentation. In Computer Vision– [1] M. B. Blaschko and C. H. Lampert. Learning to localize ob- ECCV 2014, pages 297–312. Springer, 2014. 7 jects with structured output regression. In Computer Vision– [17] K. He, X. Zhang, S. Ren, and J. Sun. Spatial pyramid pooling ECCV 2008, pages 2–15. Springer, 2008. 4 in deep convolutional networks for visual recognition. arXiv [2] L. Bourdev and J. Malik. Poselets: Body part detectors preprint arXiv:1406.4729, 2014. 5 trained using 3d human pose annotations. In International [18] G. E. Hinton, N. Srivastava, A. Krizhevsky, I. Sutskever, and Conference on Computer Vision (ICCV), 2009. 8 R. R. Salakhutdinov. Improving neural networks by pre- [3] H. Cai, Q. Wu, T. Corradi, and P. Hall. The cross- venting co-adaptation of feature detectors. arXiv preprint depiction problem: Computer vision algorithms for recog- arXiv:1207.0580, 2012. 4 nising objects in artwork and in photographs. arXiv preprint [19] D. Hoiem, Y. Chodpathumwan, and Q. Dai. Diagnosing error arXiv:1505.00110, 2015. 7 in object detectors. In Computer Vision–ECCV 2012, pages [4] N. Dalal and B. Triggs. Histograms of oriented gradients for 340–353. Springer, 2012. 6 human detection. In Computer Vision and Pattern Recogni- [20] K. Lenc and A. Vedaldi. R-cnn minus r. arXiv preprint tion, 2005. CVPR 2005. IEEE Computer Society Conference arXiv:1506.06981, 2015. 5, 6 on, volume 1, pages 886–893. IEEE, 2005. 4, 8 [21] R. Lienhart and J. Maydt. An extended set of haar-like fea- [5] T. Dean, M. Ruzon, M. Segal, J. Shlens, S. Vijaya- tures for rapid object detection. In Image Processing. 2002. narasimhan, J. Yagnik, et al. Fast, accurate detection of Proceedings. 2002 International Conference on, volume 1, 100,000 object classes on a single machine. In Computer pages I–900. IEEE, 2002. 4 Vision and Pattern Recognition (CVPR), 2013 IEEE Confer- [22] M. Lin, Q. Chen, and S. Yan. Network in network. CoRR, ence on, pages 1814–1821. IEEE, 2013. 5 abs/1312.4400, 2013. 2 [6] J. Donahue, Y. Jia, O. Vinyals, J. Hoffman, N. Zhang, [23] D. G. Lowe. Object recognition from local scale-invariant E. Tzeng, and T. Darrell. Decaf: A deep convolutional acti- features. In Computer vision, 1999. The proceedings of the vation feature for generic visual recognition. arXiv preprint seventh IEEE international conference on, volume 2, pages arXiv:1310.1531, 2013. 4 1150–1157. Ieee, 1999. 4 [7] J. Dong, Q. Chen, S. Yan, and A. Yuille. Towards unified [24] D. Mishkin. Models accuracy on imagenet 2012 object detection and semantic segmentation. In Computer val. https://github.com/BVLC/caffe/wiki/ Vision–ECCV 2014, pages 299–314. Springer, 2014. 7 Models-accuracy-on-ImageNet-2012-val. Ac- [8] D. Erhan, C. Szegedy, A. Toshev, and D. Anguelov. Scalable cessed: 2015-10-2. 3 object detection using deep neural networks. In Computer [25] C. P. Papageorgiou, M. Oren, and T. Poggio. A general Vision and Pattern Recognition (CVPR), 2014 IEEE Confer- framework for object detection. In Computer vision, 1998. ence on, pages 2155–2162. IEEE, 2014. 5, 6 sixth international conference on, pages 555–562. IEEE, [9] M. Everingham, S. M. A. Eslami, L. Van Gool, C. K. I. 1998. 4 Williams, J. Winn, and A. Zisserman. The pascal visual ob- [26] J. Redmon. Darknet: Open source neural networks in c. ject classes challenge: A retrospective. International Journal http://pjreddie.com/darknet/, 2013–2016. 3 of Computer Vision, 111(1):98–136, Jan. 2015. 2 [27] J. Redmon and A. Angelova. Real-time grasp detection using [10] P. F. Felzenszwalb, R. B. Girshick, D. McAllester, and D. Ra- convolutional neural networks. CoRR, abs/1412.3128, 2014. manan. Object detection with discriminatively trained part 5 based models. IEEE Transactions on Pattern Analysis and [28] S. Ren, K. He, R. Girshick, and J. Sun. Faster r-cnn: To- Machine Intelligence, 32(9):1627–1645, 2010. 1, 4 wards real-time object detection with region proposal net- [11] S. Gidaris and N. Komodakis. Object detection via a multi- works. arXiv preprint arXiv:1506.01497, 2015. 5, 6, 7 region & semantic segmentation-aware CNN model. CoRR, [29] S. Ren, K. He, R. B. Girshick, X. Zhang, and J. Sun. Object abs/1505.01749, 2015. 7 detection networks on convolutional feature maps. CoRR, [12] S. Ginosar, D. Haas, T. Brown, and J. Malik. Detecting peo- abs/1504.06066, 2015. 3, 7 ple in cubist art. In Computer Vision-ECCV 2014 Workshops, [30] O. Russakovsky, J. Deng, H. Su, J. Krause, S. Satheesh, pages 101–116. Springer, 2014. 7 S. Ma, Z. Huang, A. Karpathy, A. Khosla, M. Bernstein, [13] R. Girshick, J. Donahue, T. Darrell, and J. Malik. Rich fea- A. C. Berg, and L. Fei-Fei. ImageNet Large Scale Visual ture hierarchies for accurate object detection and semantic Recognition Challenge. International Journal of Computer segmentation. In Computer Vision and Pattern Recognition Vision (IJCV), 2015. 3 (CVPR), 2014 IEEE Conference on, pages 580–587. IEEE, [31] M. A. Sadeghi and D. Forsyth. 30hz object detection with 2014. 1, 4, 7 dpm v5. In Computer Vision–ECCV 2014, pages 65–79. [14] R. B. Girshick. Fast R-CNN. CoRR, abs/1504.08083, 2015. Springer, 2014. 5, 6 2, 5, 6, 7 [32] P. Sermanet, D. Eigen, X. Zhang, M. Mathieu, R. Fergus, [15] S. Gould, T. Gao, and D. Koller. Region-based segmenta- and Y. LeCun. Overfeat: Integrated recognition, localiza- tion and object detection. In Advances in neural information tion and detection using convolutional networks. CoRR, processing systems, pages 655–663, 2009. 4 abs/1312.6229, 2013. 4, 5
10 .[33] Z. Shen and X. Xue. Do more dropouts in pool5 feature maps for better object detection. arXiv preprint arXiv:1409.6911, 2014. 7 [34] C. Szegedy, W. Liu, Y. Jia, P. Sermanet, S. Reed, D. Anguelov, D. Erhan, V. Vanhoucke, and A. Rabinovich. Going deeper with convolutions. CoRR, abs/1409.4842, 2014. 2 [35] J. R. Uijlings, K. E. van de Sande, T. Gevers, and A. W. Smeulders. Selective search for object recognition. Inter- national journal of computer vision, 104(2):154–171, 2013. 4 [36] P. Viola and M. Jones. Robust real-time object detection. International Journal of Computer Vision, 4:34–47, 2001. 4 [37] P. Viola and M. J. Jones. Robust real-time face detection. International journal of computer vision, 57(2):137–154, 2004. 5 [38] J. Yan, Z. Lei, L. Wen, and S. Z. Li. The fastest deformable part model for object detection. In Computer Vision and Pat- tern Recognition (CVPR), 2014 IEEE Conference on, pages 2497–2504. IEEE, 2014. 5, 6 [39] C. L. Zitnick and P. Doll´ar. Edge boxes: Locating object pro- posals from edges. In Computer Vision–ECCV 2014, pages 391–405. Springer, 2014. 4
3秒后跳转登录页面
去登陆

