










- 快召唤伙伴们来围观吧
- 微博 QQ QQ空间 贴吧
- 文档嵌入链接
- 复制
- 微信扫一扫分享
- 已成功复制到剪贴板
Neural GPUs Learning Algorithms
Learning an algorithm from examples is a fundamental problem that has been widely studied. It has been addressed using neural networks too, in particular by Neural Turing Machines (NTMs). These are fully differentiable computers that use backpropagation to learn their own programming. Despite their appeal NTMs have a weakness that is caused by their sequential nature: they are not parallel and are are hard to train due to their large depth when unfolded. We present a neural network architecture to address this problem: the Neural GPU. It is based on a type of convolutional gated recurrent unit and, like the NTM, is computationally universal. Unlike the NTM, the Neural GPU is highly parallel which makes it easier to train and efficient to run. An essential property of algorithms is their ability to handle inputs of arbitrary size. We show that the Neural GPU can be trained on short instances of an algorithmic task and successfully generalize to long instances. We verified it on a number of tasks including long addition and long multiplication of numbers represented in binary. We train the Neural GPU on numbers with up-to 20 bits and observe no errors whatsoever while testing it, even on much longer numbers.To achieve these results we introduce a technique for training deep recurrent networks: parameter sharing relaxation. We also found a small amount of dropout and gradient noise to have a large positive effect on learning and generalization.
展开查看详情
1 . Published as a conference paper at ICLR 2016 N EURAL GPU S L EARN A LGORITHMS Łukasz Kaiser & Ilya Sutskever Google Brain {lukaszkaiser,ilyasu}@google.com A BSTRACT arXiv:1511.08228v3 [cs.LG] 15 Mar 2016 Learning an algorithm from examples is a fundamental problem that has been widely studied. It has been addressed using neural networks too, in particular by Neural Turing Machines (NTMs). These are fully differentiable computers that use backpropagation to learn their own programming. Despite their appeal NTMs have a weakness that is caused by their sequential nature: they are not parallel and are are hard to train due to their large depth when unfolded. We present a neural network architecture to address this problem: the Neural GPU. It is based on a type of convolutional gated recurrent unit and, like the NTM, is computationally universal. Unlike the NTM, the Neural GPU is highly parallel which makes it easier to train and efficient to run. An essential property of algorithms is their ability to handle inputs of arbitrary size. We show that the Neural GPU can be trained on short instances of an al- gorithmic task and successfully generalize to long instances. We verified it on a number of tasks including long addition and long multiplication of numbers rep- resented in binary. We train the Neural GPU on numbers with up-to 20 bits and observe no errors whatsoever while testing it, even on much longer numbers. To achieve these results we introduce a technique for training deep recurrent net- works: parameter sharing relaxation. We also found a small amount of dropout and gradient noise to have a large positive effect on learning and generalization. 1 I NTRODUCTION Deep neural networks have recently proven successful at various tasks, such as computer vision (Krizhevsky et al., 2012), speech recognition (Dahl et al., 2012), and in other domains. Recurrent neural networks based on long short-term memory (LSTM) cells (Hochreiter & Schmidhuber, 1997) have been successfully applied to a number of natural language processing tasks. Sequence-to- sequence recurrent neural networks with such cells can learn very complex tasks in an end-to-end manner, such as translation (Sutskever et al., 2014; Bahdanau et al., 2014; Cho et al., 2014), parsing (Vinyals & Kaiser et al., 2015), speech recognition (Chan et al., 2016) or image caption generation (Vinyals et al., 2014). Since so many tasks can be solved with essentially one model, a natural question arises: is this model the best we can hope for in supervised learning? Despite its recent success, the sequence-to-sequence model has limitations. In its basic form, the entire input is encoded into a single fixed-size vector, so the model cannot generalize to inputs much longer than this fixed capacity. One way to resolve this problem is by using an attention mechanism (Bahdanau et al., 2014). This allows the network to inspect arbitrary parts of the input in every de- coding step, so the basic limitation is removed. But other problems remain, and Joulin & Mikolov (2015) show a number of basic algorithmic tasks on which sequence-to-sequence LSTM networks fail to generalize. They propose a stack-augmented recurrent network, and it works on some prob- lems, but is limited in other ways. In the best case one would desire a neural network model able to learn arbitrarily complex algorithms given enough resources. Neural Turing Machines (Graves et al., 2014) have this theoretical property. However, they are not computationally efficient because they use soft attention and because they tend to be of considerable depth. Their depth makes the training objective difficult to optimize and im- possible to parallelize because they are learning a sequential program. Their use of soft attention requires accessing the entire memory in order to simulate 1 step of computation, which introduces substantial overhead. These two factors make learning complex algorithms using Neural Turing Ma- 1
2 .Published as a conference paper at ICLR 2016 chines difficult. These issues are not limited to Neural Turing Machines, they apply to other architec- tures too, such as stack-RNNs (Joulin & Mikolov, 2015) or (De)Queue-RNNs (Grefenstette et al., 2015). One can try to alleviate these problems using hard attention and reinforcement learning, but such non-differentiable models do not learn well at present (Zaremba & Sutskever, 2015b). In this work we present a neural network model, the Neural GPU, that addresses the above issues. It is a Turing-complete model capable of learning arbitrary algorithms in principle, like a Neural Turing Machine. But, in contrast to Neural Turing Machines, it is designed to be as parallel and as shallow as possible. It is more similar to a GPU than to a Turing machine since it uses a smaller num- ber of parallel computational steps. We show that the Neural GPU works in multiple experiments: • A Neural GPU can learn long binary multiplication from examples. It is the first neural network able to learn an algorithm whose run-time is superlinear in the size of its input. Trained on up-to 20-bit numbers, we see no single error on any inputs we tested, and we tested on numbers up-to 2000 bits long. • The same architecture can also learn long binary addition and a number of other algorith- mic tasks, such as counting, copying sequences, reversing them, or duplicating them. 1.1 R ELATED W ORK The learning of algorithms with neural networks has seen a lot of interest after the success of sequence-to-sequence neural networks on language processing tasks (Sutskever et al., 2014; Bahdanau et al., 2014; Cho et al., 2014). An attempt has even been made to learn to evaluate sim- ple python programs with a pure sequence-to-sequence model (Zaremba & Sutskever, 2015a), but more success was seen with more complex models. Neural Turing Machines (Graves et al., 2014) were shown to learn a number of basic sequence transformations and memory access patterns, and their reinforcement learning variant (Zaremba & Sutskever, 2015b) has reasonable performance on a number of tasks as well. Stack, Queue and DeQueue networks (Grefenstette et al., 2015) were also shown to learn basic sequence transformations such as bigram flipping or sequence reversal. The Grid LSTM (Kalchbrenner et al., 2016) is another powerful architecture that can learn to mul- tiply 15-digit decimal numbers. As we will see in the next section, the Grid-LSTM is quite similar to the Neural GPU – the main difference is that the Neural GPU is less recurrent and is explicitly constructed from the highly parallel convolution operator. In image processing, convolutional LSTMs, an architecture similar to the Neural GPU, have recently been used for weather prediction (Shi et al., 2015) and image compression (Toderici et al., 2016). We find it encouraging as it hints that the Neural GPU might perform well in other contexts. Most comparable to this work are the prior experiments with the stack-augmented RNNs (Joulin & Mikolov, 2015). These networks manage to learn and generalize to unseen lengths on a number of algorithmic tasks. But, as we show in Section 3.1, stack-augmented RNNs trained to add numbers up-to 20-bit long generalize only to ∼ 100-bit numbers, never to 200-bit ones, and never without error. Still, their generalization is the best we were able to obtain without using the Neural GPU and far surpasses a baseline LSTM sequence-to-sequence model with attention. The quest for learning algorithms has been pursued much more widely with tools other than neu- ral networks. It is known under names such as program synthesis, program induction, automatic programming, or inductive synthesis, and has a long history with many works that we do not cover here; see, e.g., Gulwani (2010) and Kitzelmann (2010) for a more general perspective. Since one of our results is the synthesis of an algorithm for long binary addition, let us recall how this problem has been addressed without neural networks. Importantly, there are two cases of this problem with different complexity. The easier case is when the two numbers that are to be added are aligned at input, i.e., if the first (lower-endian) bit of the first number is presented at the same time as the first bit of the second number, then come the second bits, and so on, as depicted below for x = 9 = 8 + 1 and y = 5 = 4 + 1 written in binary with least-significant bit left. Input 1 0 0 1 (x and y aligned) 1 0 1 0 Desired Output (x + y) 0 1 1 1 2
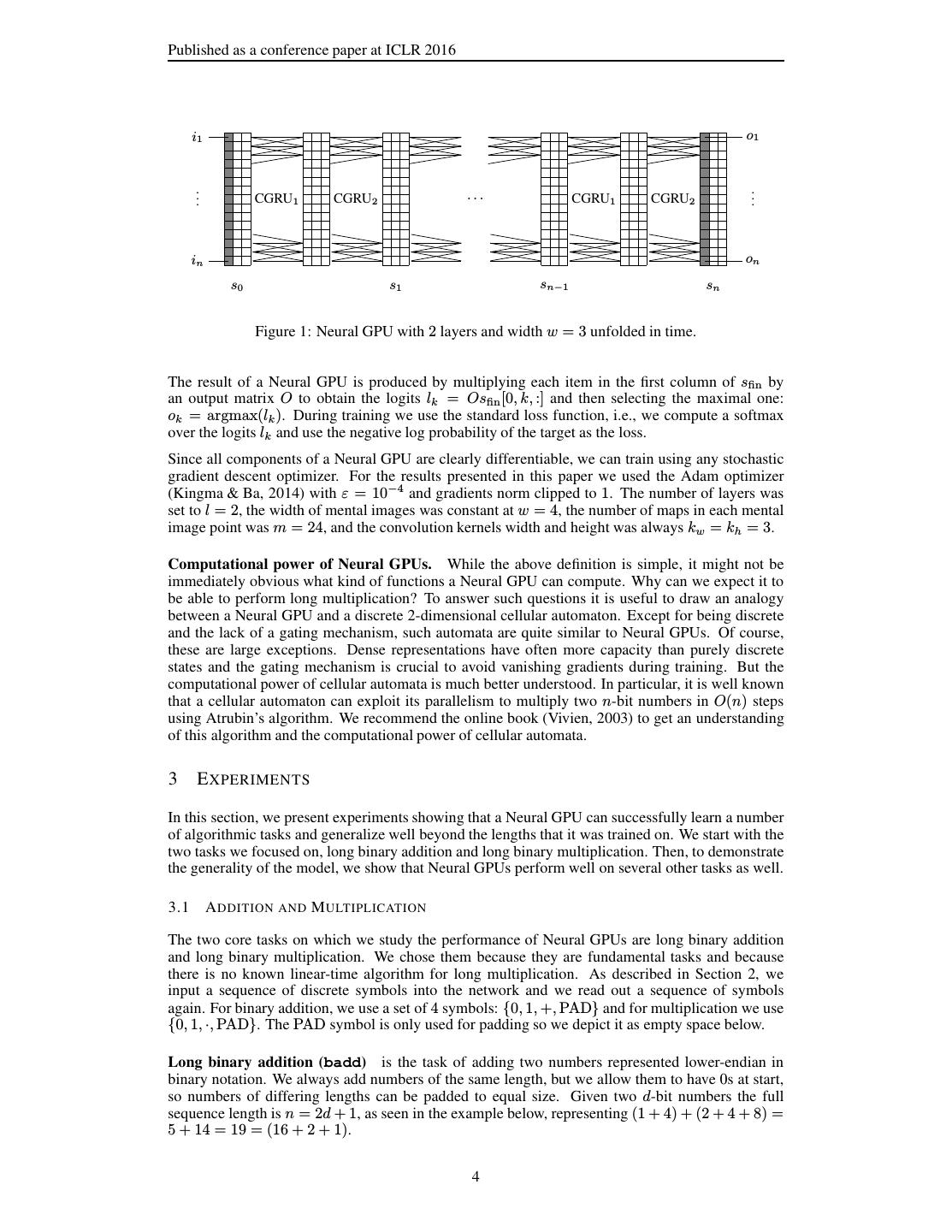
3 .Published as a conference paper at ICLR 2016 In this representation the triples of bits from (x, y, x + y), e.g., (1, 1, 0) (0, 0, 1) (0, 1, 1) (1, 0, 1) as in the figure above, form a regular language. To learn binary addition in this representation it therefore suffices to find a regular expression or an automaton that accepts this language, which can be done with a variant of Anguin’s algorithm (Angluin, 1987). But only few interesting functions have regular representations, as for example long multiplication does not (Blumensath & Gr¨adel, 2000). It is therefore desirable to learn long binary addition without alignment, for example when x and y are provided one after another. This is the representation we use in the present paper. Input (x, y) 1 0 0 1 + 1 0 1 0 Desired Output (x + y) 0 1 1 1 2 T HE N EURAL GPU Before we introduce the Neural GPU, let us recall the architecture of a Gated Recurrent Unit (GRU) (Cho et al., 2014). A GRU is similar to an LSTM, but its input and state are the same size, which makes it easier for us to generalize it later; a highway network could have also been used (Srivastava et al., 2015), but it lacks the reset gate. GRUs have shown performance similar to LSTMs on a number of tasks (Chung et al., 2014; Greff et al., 2015). A GRU takes an input vector x and a current state vector s, and outputs: GRU(x, s) = u ⊙ s + (1 − u) ⊙ tanh(W x + U (r ⊙ s) + B), where u = σ(W ′ x + U ′ s + B ′ ) and r = σ(W ′′ x + U ′′ s + B ′′ ). In the equations above, W, W ′ , W ′′ , U, U ′ , U ′′ are matrices and B, B ′ , B ′′ are bias vectors; these are the parameters that will be learned. We write W x for a matrix-vector multiplication and r ⊙ s for elementwise vector multiplication. The vectors u and r are called gates since their elements are in [0, 1] — u is the update gate and r is the reset gate. In recurrent neural networks a unit like GRU is applied at every step and the result is both passed as new state and used to compute the output. In a Neural GPU we do not process a new input in every step. Instead, all inputs are written into the starting state s0 . This state has 2-dimensional structure: it consists of w × h vectors of m numbers, i.e., it is a 3-dimensional tensor of shape [w, h, m]. This mental image evolves in time in a way defined by a convolutional gated recurrent unit: CGRU(s) = u ⊙ s + (1 − u) ⊙ tanh(U ∗ (r ⊙ s) + B), where u = σ(U ′ ∗ s + B ′ ) and r = σ(U ′′ ∗ s + B ′′ ). U ∗ s above denotes the convolution of a kernel bank U with the mental image s. A kernel bank is a 4-dimensional tensor of shape [kw , kh , m, m], i.e., it contains kw · kh · m2 parameters, where kw and kh are kernel width and height. It is applied to a mental image s of shape [w, h, m] which results in another mental image U ∗ s of the same shape defined by: ⌊kw /2⌋ ⌊kh /2⌋ m U ∗ s[x, y, i] = s[x + u, y + v, c] · U [u, v, c, i]. u=⌊−kw /2⌋ v=⌊−kh /2⌋ c=1 In the equation above the index x + u might sometimes be negative or larger than the size of s, and in such cases we assume the value is 0. This corresponds to the standard convolution operator used in convolutional neural networks with zero padding on both sides and stride 1. Using the standard operator has the advantage that it is heavily optimized (see Section 4 for Neural GPU performance). New work on faster convolutions, e.g., Lavin & Gray (2015), can be directly used in a Neural GPU. Knowing how a CGRU gate works, the definition of a l-layer Neural GPU is simple, as depicted in Figure 1. The given sequence i = (i1 , . . . , in ) of n discrete symbols from {0, . . . , I} is first em- bedded into the mental image s0 by concatenating the vectors obtained from an embedding lookup of the input symbols into its first column. More precisely, we create the starting mental image s0 of shape [w, n, m] by using an embedding matrix E of shape [I, m] and setting s0 [0, k, :] = E[ik ] (in python notation) for all k = 1 . . . n (here i1 , . . . , in is the input). All other elements of s0 are set to 0. Then, we apply l different CGRU gates in turn for n steps to produce the final mental image sfin : st+1 = CGRUl (CGRUl−1 . . . CGRU1 (st ) . . .) and sfin = sn . 3
4 .Published as a conference paper at ICLR 2016 i1 o1 .. ... .. . CGRU1 CGRU2 CGRU1 CGRU2 . in on s0 s1 sn−1 sn Figure 1: Neural GPU with 2 layers and width w = 3 unfolded in time. The result of a Neural GPU is produced by multiplying each item in the first column of sfin by an output matrix O to obtain the logits lk = Osfin [0, k, :] and then selecting the maximal one: ok = argmax(lk ). During training we use the standard loss function, i.e., we compute a softmax over the logits lk and use the negative log probability of the target as the loss. Since all components of a Neural GPU are clearly differentiable, we can train using any stochastic gradient descent optimizer. For the results presented in this paper we used the Adam optimizer (Kingma & Ba, 2014) with ε = 10−4 and gradients norm clipped to 1. The number of layers was set to l = 2, the width of mental images was constant at w = 4, the number of maps in each mental image point was m = 24, and the convolution kernels width and height was always kw = kh = 3. Computational power of Neural GPUs. While the above definition is simple, it might not be immediately obvious what kind of functions a Neural GPU can compute. Why can we expect it to be able to perform long multiplication? To answer such questions it is useful to draw an analogy between a Neural GPU and a discrete 2-dimensional cellular automaton. Except for being discrete and the lack of a gating mechanism, such automata are quite similar to Neural GPUs. Of course, these are large exceptions. Dense representations have often more capacity than purely discrete states and the gating mechanism is crucial to avoid vanishing gradients during training. But the computational power of cellular automata is much better understood. In particular, it is well known that a cellular automaton can exploit its parallelism to multiply two n-bit numbers in O(n) steps using Atrubin’s algorithm. We recommend the online book (Vivien, 2003) to get an understanding of this algorithm and the computational power of cellular automata. 3 E XPERIMENTS In this section, we present experiments showing that a Neural GPU can successfully learn a number of algorithmic tasks and generalize well beyond the lengths that it was trained on. We start with the two tasks we focused on, long binary addition and long binary multiplication. Then, to demonstrate the generality of the model, we show that Neural GPUs perform well on several other tasks as well. 3.1 A DDITION AND M ULTIPLICATION The two core tasks on which we study the performance of Neural GPUs are long binary addition and long binary multiplication. We chose them because they are fundamental tasks and because there is no known linear-time algorithm for long multiplication. As described in Section 2, we input a sequence of discrete symbols into the network and we read out a sequence of symbols again. For binary addition, we use a set of 4 symbols: {0, 1, +, PAD} and for multiplication we use {0, 1, ·, PAD}. The PAD symbol is only used for padding so we depict it as empty space below. Long binary addition (badd) is the task of adding two numbers represented lower-endian in binary notation. We always add numbers of the same length, but we allow them to have 0s at start, so numbers of differing lengths can be padded to equal size. Given two d-bit numbers the full sequence length is n = 2d + 1, as seen in the example below, representing (1 + 4) + (2 + 4 + 8) = 5 + 14 = 19 = (16 + 2 + 1). 4
5 .Published as a conference paper at ICLR 2016 Task@Bits Neural GPU stackRNN LSTM+A badd@20 100% 100% 100% badd@25 100% 100% 73% badd@100 100% 88% 0% badd@200 100% 0% 0% badd@2000 100% 0% 0% bmul@20 100% N/A 0% bmul@25 100% N/A 0% bmul@200 100% N/A 0% bmul@2000 100% N/A 0% Table 1: Neural GPU, stackRNN, and LSTM+A results on addition and multiplication. The table shows the fraction of test cases for which every single bit of the model’s output is correct. Input 1 0 1 0 + 0 1 1 1 Output 1 1 0 0 1 Long binary multiplication (bmul) is the task of multiplying two binary numbers, represented lower-endian. Again, we always multiply numbers of the same length, but we allow them to have 0s at start, so numbers of differing lengths can be padded to equal size. Given two d-bit numbers, the full sequence length is again n = 2d+1, as seen in the example below, representing (2+4)·(2+8) = 6 · 10 = 60 = 32 + 16 + 8 + 4. Input 0 1 1 0 · 0 1 0 1 Output 0 0 1 1 1 Models. We compare three different models on the above tasks. In addition to the Neural GPU we include a baseline LSTM recurrent neural network with an attention mechanism. We call this model LSTM+A as it is exactly the same as described in (Vinyals & Kaiser et al., 2015). It is a 3-layer model with 64 units in each LSTM cell in each layer, which results in about 200k param- eters (the Neural GPU uses m = 24 and has about 30k paramters). Both the Neural GPU and the LSTM+A baseline were trained using all the techniques described below, including curriculum training and gradient noise. Finally, on binary addition, we also include the stack-RNN model from (Joulin & Mikolov, 2015). This model was not trained using our training regime, but in exactly the way as provided in its source code, only with nmax = 41. To match our training procedure, we ran it 729 times (cf. Section 3.3) with different random seeds and we report the best obtained result. Results. We measure also the rate of fully correct output sequences and report the results in Ta- ble 1. For both tasks, we show first the error at the maximum length seen during training, i.e., for 20-bit numbers. Note that LSTM+A is not able to learn long binary multiplication at this length, it does not even fit the training data. Then we report numbers for sizes not seen during training. As you can see, a Neural GPU can learn a multiplication algorithm that generalizes perfectly, at least as far as we were able to test (technical limits of our implementation prevented us from testing much above 2000 bits). Even for the simpler task of binary addition, stack-RNNs work only up-to length 100. This is still much better than the LSTM+A baseline which only generalizes to length 25. 3.2 OTHER A LGORITHMIC TASKS In addition to the two main tasks above, we tested Neural GPUs on the following simpler algorithmic tasks. The same architecture as used above was able to solve all of the tasks described below, i.e., after being trained on sequences of length up-to 41 we were not able to find any error on sequences on any length we tested (up-to 4001). Copying sequences is the simple task of producing on output the same sequence as on input. It is very easy for a Neural GPU, in fact all models converge quickly and generalize perfectly. Reversing sequences is the task of reversing a sequence of bits, n is the length of the sequence. 5
6 .Published as a conference paper at ICLR 2016 Duplicating sequences is the task of duplicating the input bit sequence on output twice, as in the example below. We use the padding symbol on input to make it match the output length. We trained on sequences of inputs up-to 20 bits, so outputs were up-to 40-bits long, and tested on inputs up-to 2000 bits long. Input 0 0 1 1 Output 0 0 1 1 0 0 1 1 Counting by sorting bits is the task of sorting the input bit sequence on output. Since there are only 2 symbols to sort, this is a counting tasks – the network must count how many 0s are in the input and produce the output accordingly, as in the example below. Input 1 0 1 1 0 0 1 0 Output 0 0 0 0 1 1 1 1 3.3 T RAINING T ECHNIQUES Here we describe the training methods that we used to improve our results. Note that we applied these methods to the LSTM+A baseline as well, to keep the above comparison fair. We focus on the most important elements of our training regime, all less relevant details can be found in the code which is released as open-source.1 Grid search. Each result we report is obtained by running a grid search over 36 = 729 instances. We consider 3 settings of the learning rate, initial parameters scale, and 4 other hyperparameters discussed below: the relaxation pull factor, curriculum progress threshold, gradient noise scale, and dropout. An important effect of running this grid search is also that we train 729 models with differ- ent random seeds every time. Usually only a few of these models generalize to 2000-bit numbers, but a significant fraction works well on 200-bit numbers, as discussed below. Curriculum learning. We use a curriculum learning approach inspired by Zaremba & Sutskever (2015a). This means that we train, e.g., on 7-digit numbers only after crossing a curriculum progress threshold (e.g., over 90% fully correct outputs) on 6-digit numbers. However, with 20% probability we pick a minibatch of d-digit numbers with d chosen uniformly at random between 1 and 20. Gradients noise. To improve training speed and stability we add noise to gradients in each training step. Inspired by the schedule from Welling & Teh (2011), we add to gradients a noise drawn from the normal distribution with mean 0 and variance inversely proportional to the square root of step- number (i.e., with standard deviation proportional to the 4-th root of step-number). We multiply this noise by the gradient noise scale and, to avoid noise in converged models, we also multiply it by the fraction of non-fully-correct outputs (which is 0 for a perfect model). Gate cutoff. In Section 2 we defined the gates in a CGRU using the sigmoid function, e.g., we wrote u = σ(U ′ ∗ s + B ′ ). Usually the standard sigmoid function is used, σ(x) = 1+e1−x . We found that adding a hard threshold on the top and bottom helps slightly in our setting, so we use 1.2σ(x) − 0.1 cut to the interval [0, 1], i.e., σ ′ (x) = max(0, min(1, 1.2σ(x) − 0.1)). 3.3.1 D ROPOUT ON RECURRENT CONNECTIONS Dropout is a widely applied technique for regularizing neural networks. But when applying it to recurrent networks, it has been counter-productive to apply it on recurrent connections – it only worked when applied to the non-recurrent ones, as reported by Pham et al. (2014). Since a Neural GPU does not have non-recurrent connections it might seem that dropout will not be useful for this architecture. Surprisingly, we found the contrary – it is useful and improves generalization. The key to using dropout effectively in this setting is to set a small dropout rate. When we run a grid search for dropout rates we vary them between 6%, 9%, and 13.5%, meaning that over 85% of the values are always preserved. It turns out that even this small dropout has large 1 The code is at https://github.com/tensorflow/models/tree/master/neural_gpu. 6
7 .Published as a conference paper at ICLR 2016 effect since we apply it to the whole mental image si in each step i. Presumably the network now learns to include some redundancy in its internal representation and generalization benefits from it. Without dropout we usually see only a few models from a 729 grid search generalize reasonably, while with dropout it is a much larger fraction and they generalize to higher lengths. In particular, dropout was necessary to train models for multiplication that generalize to 2000 bits. 3.3.2 PARAMETER SHARING RELAXATION . To improve optimization of our deep network we use a relaxation technique for shared parameters which works as follows. Instead of training with parameters shared across time-steps we use r identical sets of non-shared parameters (we often use r = 6, larger numbers work better but use more memory). At time-step t of the Neural GPU we use the i-th set if t mod r = i. The procedure described above relaxes the network, as it can now perform different operations in different time-steps. Training becomes easier, but we now have r parameters instead of the single shared set we want. To unify them we add a term to the cost function representing the distance of each parameter from the average of this parameter in all the r sets. This term in the final cost function is multiplied by a scalar which we call the relaxation pull. If the relaxation pull is 0, the network behaves as if the r parameter sets were separate, but when it is large, the cost forces the network to unify the parameters across different set. During training, we gradually increase the relaxation pull. We start with a small value and every time the curriculum makes progress, e.g., when the model performs well on 6-digit numbers, we multiply the relaxation pull by a relaxation pull factor. When the curriculum reaches the maximal length we average the parameters from all sets and continue to train with a single shared parameter set. This method is crucial for learning multiplication. Without it, a Neural GPU with m = 24 has trouble to even fit the training set, and the few models that manage to do it do not generalize. With relaxation almost all models in our 729 runs manage to fit the training data. 4 D ISCUSSION We prepared a video of the Neural GPU trained to solve the tasks mentioned above.2. It shows the state in each step with values of −1 drawn in white, 1 in black, and other in gray. This gives an intuition how the Neural GPU solves the discussed problems, e.g., it is quite clear that for the duplication task the Neural GPU learned to move a part of the embedding downwards in each step. What did not work well? For one, using decimal inputs degrades performance. All tasks above can easily be formulated with decimal inputs instead of binary ones. One could hope that a Neural GPU will work well in this case too, maybe with a larger m. We experimented with this formulation and our results were worse than when the representation was binary: we did not manage to learn long decimal multiplication. Increasing m to 128 allows to learn all other tasks in the decimal setting. Another problem is that often only a few models in a 729 grid search generalize to very long unseen instances. Among those 729 models, there usually are many models that generalize to 40 or even 200 bits, but only a few working without error for 2000-bit numbers. Using dropout and gradient noise improves the reliability of training and generalization, but maybe another technique could help even more. How could we make more models achieve good generalization? One idea that looks natural is to try to reduce the number of parameters by decreasing m. Surprisingly, this does not seem to have any influence. In addition to the m = 24 results presented above we ran experiments with m = 32, 64, 128 and the results were similar. In fact using m = 128 we got the most models to generalize. Additionally, we observed that ensembling a few models, just by averaging their outputs, helps to generalize: ensembles of 5 models almost always generalize perfectly on binary tasks. Why use width? The Neural GPU is defined using two-dimensional convolutions and in our exper- iments one of the dimensions is always set to 4. Doing so is not necessary since a one-dimensional Neural GPU that uses four times larger m can represent every function representable by the original one. In fact we trained a model for long binary multiplication that generalized to 2000-bit numbers using a Neural GPU with width 1 and m = 64. However, the width of the Neural GPU increases the 2 The video is available at https://www.youtube.com/watch?v=LzC8NkTZAF4 7
8 .Published as a conference paper at ICLR 2016 amount of information carried in its hidden state without increasing the number of its parameters. Thus it can be thought of as a factorization and might be useful for other tasks. Speed and data efficiency. Neural GPUs use the standard, heavily optimized convolution operation and are fast. We experimented with a 2-layer Neural GPU for n = 32 and m = 64. After unfolding in time it has 128 layers of CGRUs, each operating on 32 mental images, each 4 × 64 × 64 . The joint forward-backward step time for this network was about 0.6s on an NVIDIA GTX 970 GPU. We were also surprised by how data-efficient a Neural GPU can be. The experiments presented above were all performed using 10k random training data examples for each training length. Since we train on up-to 20-bit numbers this adds to about 200k training examples. We tried to train using only 100 examples per length, so about 2000 total training instances. We were surprised to see that it actually worked well for binary addition: there were models that generalized well to 200-bit numbers and to all lengths below despite such small training set. But we never managed to train a good model for binary multiplication with that little training data. 5 C ONCLUSIONS AND F UTURE WORK The results presented in Table 1 show clearly that there is a qualitative difference between what can be achieved with a Neural GPU and what was possible with previous architectures. In particular, for the first time, we show a neural network that learns a non-trivial superlinear-time algorithm in a way that generalized to much higher lengths without errors. This opens the way to use neural networks in domains that were previously only addressed by discrete methods, such as program synthesis. With the surprising data efficiency of Neural GPUs it could even be possible to replicate previous program synthesis results, e.g., Kaiser (2012), but in a more scalable way. It is also interesting that a Neural GPU can learn symbolic algorithms without using any discrete state at all, and adding dropout and noise only improves its performance. Another promising future work is to apply Neural GPUs to language processing tasks. Good results have already been obtained on translation with a convolutional architecture over words (Kalchbrenner & Blunsom, 2013) and adding gating and recursion, like in a Neural GPU, should allow to train much deeper models without overfitting. Finally, the parameter sharing relaxation technique can be applied to any deep recurrent network and has the potential to improve RNN train- ing in general. R EFERENCES Angluin, Dana. Learning regaular sets from queries and counterexamples. Information and Computation, 75: 87–106, 1987. Bahdanau, Dzmitry, Cho, Kyunghyun, and Bengio, Yoshua. Neural machine translation by jointly learning to align and translate. CoRR, abs/1409.0473, 2014. URL http://arxiv.org/abs/1409.0473. Blumensath, Achim and Gr¨adel, Erich. Automatic Structures. In Proceedings of LICS 2000, pp. 51–62, 2000. URL http://www.logic.rwth-aachen.de/pub/graedel/BlGr-lics00.ps. Chan, William, Jaitly, Navdeep, Le, Quoc V., and Vinyals, Oriol. Listen, attend and spell. In International Conference on Acoustics, Speech and Signal Processing, ICASSP’16, 2016. Cho, Kyunghyun, van Merrienboer, Bart, Gulcehre, Caglar, Bougares, Fethi, Schwenk, Holger, and Bengio, Yoshua. Learning phrase representations using rnn encoder-decoder for statistical machine translation. CoRR, abs/1406.1078, 2014. URL http://arxiv.org/abs/1406.1078. Chung, Junyoung, G¨ulc¸ehre, C ¸ aglar, Cho, Kyunghyun, and Bengio, Yoshua. Empirical evaluation of gated recurrent neural networks on sequence modeling. CoRR, abs/1412.3555, 2014. URL http://arxiv.org/abs/1412.3555. Dahl, George E., Yu, Dong, Deng, Li, and Acero, Alex. Context-dependent pre-trained deep neural networks for large-vocabulary speech recognition. IEEE Transactions on Audio, Speech & Language Processing, 20 (1):30–42, 2012. Graves, Alex, Wayne, Greg, and Danihelka, Ivo. Neural turing machines. CoRR, abs/1410.5401, 2014. URL http://arxiv.org/abs/1410.5401. 8
9 .Published as a conference paper at ICLR 2016 Grefenstette, Edward, Hermann, Karl Moritz, Suleyman, Mustafa, and Blunsom, Phil. Learning to transduce with unbounded memory. CoRR, abs/1506.02516, 2015. URL http://arxiv.org/abs/1506.02516. Greff, Klaus, Srivastava, Rupesh Kumar, Koutn´ık, Jan, Steunebrink, Bas R., and Schmidhuber, J¨urgen. LSTM: A search space odyssey. CoRR, abs/1503.04069, 2015. URL http://arxiv.org/abs/1503.04069. Gulwani, Sumit. Dimensions in program synthesis. In Proceedings of PPDP 2010, PPDP ’10, pp. 13–24, 2010. Hochreiter, Sepp and Schmidhuber, J¨urgen. Long short-term memory. Neural computation, 9(8):1735–1780, 1997. Joulin, Armand and Mikolov, Tomas. Inferring algorithmic patterns with stack-augmented recurrent nets. CoRR, abs/1503.01007, 2015. URL http://arxiv.org/abs/1503.01007. Kaiser, Łukasz. Learning games from videos guided by descriptive complexity. In Proceedings of the AAAI-12, pp. 963–970. AAAI Press, 2012. URL http://goo.gl/mRbfV5. Kalchbrenner, Nal and Blunsom, Phil. Recurrent continuous translation models. In Proceedings EMNLP 2013, pp. 1700–1709, 2013. URL http://nal.co/papers/KalchbrennerBlunsom_EMNLP13. Kalchbrenner, Nal, Danihelka, Ivo, and Graves, Alex. Grid long short-term memory. In International Confer- ence on Learning Representations, 2016. URL http://arxiv.org/abs/1507.01526. Kingma, Diederik P. and Ba, Jimmy. Adam: A method for stochastic optimization. CoRR, abs/1412.6980, 2014. URL http://arxiv.org/abs/1412.6980. Kitzelmann, Emanuel. Inductive programming: A survey of program synthesis techniques. In Approaches and Applications of Inductive Programming, AAIP 2009, volume 5812 of LNCS, pp. 50–73, 2010. Krizhevsky, Alex, Sutskever, Ilya, and Hinton, Geoffrey. Imagenet classification with deep convolutional neural network. In Advances in Neural Information Processing Systems, 2012. Lavin, Andrew and Gray, Scott. Fast algorithms for convolutional neural networks. CoRR, abs/1509.09308, 2015. URL http://arxiv.org/abs/1509.09308. Pham, Vu, Bluche, Th´eodore, Kermorvant, Christopher, and Louradour, J´erˆome. Dropout improves recur- rent neural networks for handwriting recognition. In International Conference on Frontiers in Handwriting Recognition (ICFHR), pp. 285–290. IEEE, 2014. URL http://arxiv.org/pdf/1312.4569.pdf. Shi, Xingjian, Chen, Zhourong, Wang, Hao, Yeung, Dit-Yan, kin Wong, Wai, and chun Woo, Wang. Convo- lutional LSTM network: A machine learning approach for precipitation nowcasting. In Advances in Neural Information Processing Systems, 2015. URL http://arxiv.org/abs/1506.04214. Srivastava, Rupesh Kumar, Greff, Klaus, and Schmidhuber, J¨urgen. Highway networks. CoRR, abs/1505.00387, 2015. URL http://arxiv.org/abs/1505.00387. Sutskever, Ilya, Vinyals, Oriol, and Le, Quoc VV. Sequence to sequence learning with neural net- works. In Advances in Neural Information Processing Systems, pp. 3104–3112, 2014. URL http://arxiv.org/abs/1409.3215. Toderici, George, O’Malley, Sean M., Hwang, Sung Jin, Vincent, Damien, Minnen, David, Baluja, Shumeet, Covell, Michele, and Sukthankar, Rahul. Variable rate image compression with recur- rent neural networks. In International Conference on Learning Representations, 2016. URL http://arxiv.org/abs/1511.06085. Vinyals & Kaiser, Koo, Petrov, Sutskever, and Hinton. Grammar as a foreign language. In Advances in Neural Information Processing Systems, 2015. URL http://arxiv.org/abs/1412.7449. Vinyals, Oriol, Toshev, Alexander, Bengio, Samy, and Erhan, Dumitru. Show and tell: A neural image caption generator. CoRR, abs/1411.4555, 2014. URL http://arxiv.org/abs/1411.4555. Vivien, Helene. An Introduction to cellular automata. 2003. URL http://www.liafa.univ-paris-diderot.fr/˜yunes/ca/archives/bookvivien.pdf. Welling, Max and Teh, Yee Whye. Bayesian learning via stochastic gradient Langevin dynamics. In Proceed- ings of ICML 2011, pp. 681–688, 2011. Zaremba, Wojciech and Sutskever, Ilya. Learning to execute. CoRR, abs/1410.4615, 2015a. URL http://arxiv.org/abs/1410.4615. Zaremba, Wojciech and Sutskever, Ilya. Reinforcement learning neural turing machines. CoRR, abs/1505.00521, 2015b. URL http://arxiv.org/abs/1505.00521. 9
3秒后跳转登录页面
去登陆

