








- 快召唤伙伴们来围观吧
- 微博 QQ QQ空间 贴吧
- 文档嵌入链接
- 复制
- 微信扫一扫分享
- 已成功复制到剪贴板
Fast R-CNN
This paper proposes a Fast Region-based Convolutional Network method (Fast R-CNN) for object detection. Fast R-CNN builds on previous work to efficiently classify object proposals using deep convolutional networks. Compared to previous work, Fast R-CNN employs several innovations to improve training and testing speed while also increasing detection accuracy. Fast R-CNN trains the very deep VGG16 network 9× faster than R-CNN, is 213× faster at test-time, and achieves a higher mAP on PASCAL VOC 2012. Compared to SPPnet, Fast R-CNN trains VGG16 3× faster, tests 10× faster, and is more accurate. Fast R-CNN is implemented in Python and C++ (using Caffe) and is available under the open-source MIT License at https://github.com/rbgirshick/fast-rcnn.
展开查看详情
1 . Fast R-CNN Ross Girshick Microsoft Research rbg@microsoft.com arXiv:1504.08083v2 [cs.CV] 27 Sep 2015 Abstract while achieving top accuracy on PASCAL VOC 2012 [7] with a mAP of 66% (vs. 62% for R-CNN).1 This paper proposes a Fast Region-based Convolutional Network method (Fast R-CNN) for object detection. Fast 1.1. R-CNN and SPPnet R-CNN builds on previous work to efficiently classify ob- The Region-based Convolutional Network method (R- ject proposals using deep convolutional networks. Com- CNN) [9] achieves excellent object detection accuracy by pared to previous work, Fast R-CNN employs several in- using a deep ConvNet to classify object proposals. R-CNN, novations to improve training and testing speed while also however, has notable drawbacks: increasing detection accuracy. Fast R-CNN trains the very deep VGG16 network 9× faster than R-CNN, is 213× faster 1. Training is a multi-stage pipeline. R-CNN first fine- at test-time, and achieves a higher mAP on PASCAL VOC tunes a ConvNet on object proposals using log loss. 2012. Compared to SPPnet, Fast R-CNN trains VGG16 3× Then, it fits SVMs to ConvNet features. These SVMs faster, tests 10× faster, and is more accurate. Fast R-CNN act as object detectors, replacing the softmax classi- is implemented in Python and C++ (using Caffe) and is fier learnt by fine-tuning. In the third training stage, available under the open-source MIT License at https: bounding-box regressors are learned. //github.com/rbgirshick/fast-rcnn. 2. Training is expensive in space and time. For SVM and bounding-box regressor training, features are ex- tracted from each object proposal in each image and 1. Introduction written to disk. With very deep networks, such as VGG16, this process takes 2.5 GPU-days for the 5k Recently, deep ConvNets [14, 16] have significantly im- images of the VOC07 trainval set. These features re- proved image classification [14] and object detection [9, 19] quire hundreds of gigabytes of storage. accuracy. Compared to image classification, object detec- tion is a more challenging task that requires more com- 3. Object detection is slow. At test-time, features are plex methods to solve. Due to this complexity, current ap- extracted from each object proposal in each test image. proaches (e.g., [9, 11, 19, 25]) train models in multi-stage Detection with VGG16 takes 47s / image (on a GPU). pipelines that are slow and inelegant. R-CNN is slow because it performs a ConvNet forward Complexity arises because detection requires the ac- pass for each object proposal, without sharing computation. curate localization of objects, creating two primary chal- Spatial pyramid pooling networks (SPPnets) [11] were pro- lenges. First, numerous candidate object locations (often posed to speed up R-CNN by sharing computation. The called “proposals”) must be processed. Second, these can- SPPnet method computes a convolutional feature map for didates provide only rough localization that must be refined the entire input image and then classifies each object pro- to achieve precise localization. Solutions to these problems posal using a feature vector extracted from the shared fea- often compromise speed, accuracy, or simplicity. ture map. Features are extracted for a proposal by max- In this paper, we streamline the training process for state- pooling the portion of the feature map inside the proposal of-the-art ConvNet-based object detectors [9, 11]. We pro- into a fixed-size output (e.g., 6 × 6). Multiple output sizes pose a single-stage training algorithm that jointly learns to are pooled and then concatenated as in spatial pyramid pool- classify object proposals and refine their spatial locations. ing [15]. SPPnet accelerates R-CNN by 10 to 100× at test The resulting method can train a very deep detection time. Training time is also reduced by 3× due to faster pro- network (VGG16 [20]) 9× faster than R-CNN [9] and 3× posal feature extraction. faster than SPPnet [11]. At runtime, the detection network processes images in 0.3s (excluding object proposal time) 1 All timings use one Nvidia K40 GPU overclocked to 875 MHz.
2 . SPPnet also has notable drawbacks. Like R-CNN, train- Outputs: ing is a multi-stage pipeline that involves extracting fea- bbox Deep softmax regressor tures, fine-tuning a network with log loss, training SVMs, ConvNet RoI FC FC and finally fitting bounding-box regressors. Features are pooling also written to disk. But unlike R-CNN, the fine-tuning al- layer FCs RoI gorithm proposed in [11] cannot update the convolutional projection layers that precede the spatial pyramid pooling. Unsurpris- Conv RoI feature ingly, this limitation (fixed convolutional layers) limits the feature map vector For each RoI accuracy of very deep networks. Figure 1. Fast R-CNN architecture. An input image and multi- 1.2. Contributions ple regions of interest (RoIs) are input into a fully convolutional network. Each RoI is pooled into a fixed-size feature map and We propose a new training algorithm that fixes the disad- then mapped to a feature vector by fully connected layers (FCs). vantages of R-CNN and SPPnet, while improving on their The network has two output vectors per RoI: softmax probabilities speed and accuracy. We call this method Fast R-CNN be- and per-class bounding-box regression offsets. The architecture is cause it’s comparatively fast to train and test. The Fast R- trained end-to-end with a multi-task loss. CNN method has several advantages: RoI max pooling works by dividing the h × w RoI win- 1. Higher detection quality (mAP) than R-CNN, SPPnet dow into an H × W grid of sub-windows of approximate 2. Training is single-stage, using a multi-task loss size h/H × w/W and then max-pooling the values in each 3. Training can update all network layers sub-window into the corresponding output grid cell. Pool- ing is applied independently to each feature map channel, 4. No disk storage is required for feature caching as in standard max pooling. The RoI layer is simply the Fast R-CNN is written in Python and C++ (Caffe special-case of the spatial pyramid pooling layer used in [13]) and is available under the open-source MIT Li- SPPnets [11] in which there is only one pyramid level. We cense at https://github.com/rbgirshick/ use the pooling sub-window calculation given in [11]. fast-rcnn. 2.2. Initializing from pre-trained networks 2. Fast R-CNN architecture and training We experiment with three pre-trained ImageNet [4] net- works, each with five max pooling layers and between five Fig. 1 illustrates the Fast R-CNN architecture. A Fast and thirteen conv layers (see Section 4.1 for network de- R-CNN network takes as input an entire image and a set tails). When a pre-trained network initializes a Fast R-CNN of object proposals. The network first processes the whole network, it undergoes three transformations. image with several convolutional (conv) and max pooling First, the last max pooling layer is replaced by a RoI layers to produce a conv feature map. Then, for each ob- pooling layer that is configured by setting H and W to be ject proposal a region of interest (RoI) pooling layer ex- compatible with the net’s first fully connected layer (e.g., tracts a fixed-length feature vector from the feature map. H = W = 7 for VGG16). Each feature vector is fed into a sequence of fully connected Second, the network’s last fully connected layer and soft- (fc) layers that finally branch into two sibling output lay- max (which were trained for 1000-way ImageNet classifi- ers: one that produces softmax probability estimates over cation) are replaced with the two sibling layers described K object classes plus a catch-all “background” class and earlier (a fully connected layer and softmax over K + 1 cat- another layer that outputs four real-valued numbers for each egories and category-specific bounding-box regressors). of the K object classes. Each set of 4 values encodes refined Third, the network is modified to take two data inputs: a bounding-box positions for one of the K classes. list of images and a list of RoIs in those images. 2.1. The RoI pooling layer 2.3. Fine-tuning for detection The RoI pooling layer uses max pooling to convert the Training all network weights with back-propagation is an features inside any valid region of interest into a small fea- important capability of Fast R-CNN. First, let’s elucidate ture map with a fixed spatial extent of H × W (e.g., 7 × 7), why SPPnet is unable to update weights below the spatial where H and W are layer hyper-parameters that are inde- pyramid pooling layer. pendent of any particular RoI. In this paper, an RoI is a The root cause is that back-propagation through the SPP rectangular window into a conv feature map. Each RoI is layer is highly inefficient when each training sample (i.e. defined by a four-tuple (r, c, h, w) that specifies its top-left RoI) comes from a different image, which is exactly how corner (r, c) and its height and width (h, w). R-CNN and SPPnet networks are trained. The inefficiency
3 .stems from the fact that each RoI may have a very large bounding box and hence Lloc is ignored. For bounding-box receptive field, often spanning the entire input image. Since regression, we use the loss the forward pass must process the entire receptive field, the training inputs are large (often the entire image). Lloc (tu , v) = smoothL1 (tui − vi ), (2) We propose a more efficient training method that takes i∈{x,y,w,h} advantage of feature sharing during training. In Fast R- in which CNN training, stochastic gradient descent (SGD) mini- batches are sampled hierarchically, first by sampling N im- 0.5x2 if |x| < 1 ages and then by sampling R/N RoIs from each image. smoothL1 (x) = (3) |x| − 0.5 otherwise, Critically, RoIs from the same image share computation and memory in the forward and backward passes. Making is a robust L1 loss that is less sensitive to outliers than the N small decreases mini-batch computation. For example, L2 loss used in R-CNN and SPPnet. When the regression when using N = 2 and R = 128, the proposed training targets are unbounded, training with L2 loss can require scheme is roughly 64× faster than sampling one RoI from careful tuning of learning rates in order to prevent exploding 128 different images (i.e., the R-CNN and SPPnet strategy). gradients. Eq. 3 eliminates this sensitivity. One concern over this strategy is it may cause slow train- The hyper-parameter λ in Eq. 1 controls the balance be- ing convergence because RoIs from the same image are cor- tween the two task losses. We normalize the ground-truth related. This concern does not appear to be a practical issue regression targets vi to have zero mean and unit variance. and we achieve good results with N = 2 and R = 128 All experiments use λ = 1. using fewer SGD iterations than R-CNN. We note that [6] uses a related loss to train a class- In addition to hierarchical sampling, Fast R-CNN uses a agnostic object proposal network. Different from our ap- streamlined training process with one fine-tuning stage that proach, [6] advocates for a two-network system that sepa- jointly optimizes a softmax classifier and bounding-box re- rates localization and classification. OverFeat [19], R-CNN gressors, rather than training a softmax classifier, SVMs, [9], and SPPnet [11] also train classifiers and bounding-box and regressors in three separate stages [9, 11]. The compo- localizers, however these methods use stage-wise training, nents of this procedure (the loss, mini-batch sampling strat- which we show is suboptimal for Fast R-CNN (Section 5.1). egy, back-propagation through RoI pooling layers, and SGD hyper-parameters) are described below. Mini-batch sampling. During fine-tuning, each SGD mini-batch is constructed from N = 2 images, chosen uni- Multi-task loss. A Fast R-CNN network has two sibling formly at random (as is common practice, we actually iter- output layers. The first outputs a discrete probability distri- ate over permutations of the dataset). We use mini-batches bution (per RoI), p = (p0 , . . . , pK ), over K + 1 categories. of size R = 128, sampling 64 RoIs from each image. As As usual, p is computed by a softmax over the K +1 outputs in [9], we take 25% of the RoIs from object proposals that of a fully connected layer. The second sibling layer outputs have intersection over union (IoU) overlap with a ground- bounding-box regression offsets, tk = tkx , tky , tkw , tkh , for truth bounding box of at least 0.5. These RoIs comprise each of the K object classes, indexed by k. We use the pa- the examples labeled with a foreground object class, i.e. rameterization for tk given in [9], in which tk specifies a u ≥ 1. The remaining RoIs are sampled from object pro- scale-invariant translation and log-space height/width shift posals that have a maximum IoU with ground truth in the in- relative to an object proposal. terval [0.1, 0.5), following [11]. These are the background Each training RoI is labeled with a ground-truth class u examples and are labeled with u = 0. The lower threshold and a ground-truth bounding-box regression target v. We of 0.1 appears to act as a heuristic for hard example mining use a multi-task loss L on each labeled RoI to jointly train [8]. During training, images are horizontally flipped with for classification and bounding-box regression: probability 0.5. No other data augmentation is used. L(p, u, tu , v) = Lcls (p, u) + λ[u ≥ 1]Lloc (tu , v), (1) Back-propagation through RoI pooling layers. Back- in which Lcls (p, u) = − log pu is log loss for true class u. propagation routes derivatives through the RoI pooling The second task loss, Lloc , is defined over a tuple of layer. For clarity, we assume only one image per mini-batch true bounding-box regression targets for class u, v = (N = 1), though the extension to N > 1 is straightforward (vx , vy , vw , vh ), and a predicted tuple tu = (tux , tuy , tuw , tuh ), because the forward pass treats all images independently. again for class u. The Iverson bracket indicator function Let xi ∈ R be the i-th activation input into the RoI pool- [u ≥ 1] evaluates to 1 when u ≥ 1 and 0 otherwise. By ing layer and let yrj be the layer’s j-th output from the r- convention the catch-all background class is labeled u = 0. th RoI. The RoI pooling layer computes yrj = xi∗ (r,j) , in For background RoIs there is no notion of a ground-truth which i∗ (r, j) = argmaxi ∈R(r,j) xi . R(r, j) is the index
4 .set of inputs in the sub-window over which the output unit test-time, R is typically around 2000, although we will con- yrj max pools. A single xi may be assigned to several dif- sider cases in which it is larger (≈ 45k). When using an ferent outputs yrj . image pyramid, each RoI is assigned to the scale such that The RoI pooling layer’s backwards function computes the scaled RoI is closest to 2242 pixels in area [11]. partial derivative of the loss function with respect to each For each test RoI r, the forward pass outputs a class input variable xi by following the argmax switches: posterior probability distribution p and a set of predicted bounding-box offsets relative to r (each of the K classes ∂L ∂L = [i = i∗ (r, j)] . (4) gets its own refined bounding-box prediction). We assign a ∂xi r j ∂yrj detection confidence to r for each object class k using the ∆ estimated probability Pr(class = k | r) = pk . We then In words, for each mini-batch RoI r and for each pooling perform non-maximum suppression independently for each output unit yrj , the partial derivative ∂L/∂yrj is accumu- class using the algorithm and settings from R-CNN [9]. lated if i is the argmax selected for yrj by max pooling. In back-propagation, the partial derivatives ∂L/∂yrj are al- 3.1. Truncated SVD for faster detection ready computed by the backwards function of the layer on top of the RoI pooling layer. For whole-image classification, the time spent comput- ing the fully connected layers is small compared to the conv layers. On the contrary, for detection the number of RoIs SGD hyper-parameters. The fully connected layers used to process is large and nearly half of the forward pass time for softmax classification and bounding-box regression are is spent computing the fully connected layers (see Fig. 2). initialized from zero-mean Gaussian distributions with stan- Large fully connected layers are easily accelerated by com- dard deviations 0.01 and 0.001, respectively. Biases are ini- pressing them with truncated SVD [5, 23]. tialized to 0. All layers use a per-layer learning rate of 1 for In this technique, a layer parameterized by the u × v weights and 2 for biases and a global learning rate of 0.001. weight matrix W is approximately factorized as When training on VOC07 or VOC12 trainval we run SGD for 30k mini-batch iterations, and then lower the learning W ≈ U Σt V T (5) rate to 0.0001 and train for another 10k iterations. When we train on larger datasets, we run SGD for more iterations, using SVD. In this factorization, U is a u × t matrix com- as described later. A momentum of 0.9 and parameter decay prising the first t left-singular vectors of W , Σt is a t × t of 0.0005 (on weights and biases) are used. diagonal matrix containing the top t singular values of W , and V is v × t matrix comprising the first t right-singular 2.4. Scale invariance vectors of W . Truncated SVD reduces the parameter count We explore two ways of achieving scale invariant ob- from uv to t(u + v), which can be significant if t is much ject detection: (1) via “brute force” learning and (2) by us- smaller than min(u, v). To compress a network, the single ing image pyramids. These strategies follow the two ap- fully connected layer corresponding to W is replaced by proaches in [11]. In the brute-force approach, each image two fully connected layers, without a non-linearity between is processed at a pre-defined pixel size during both training them. The first of these layers uses the weight matrix Σt V T and testing. The network must directly learn scale-invariant (and no biases) and the second uses U (with the original bi- object detection from the training data. ases associated with W ). This simple compression method The multi-scale approach, in contrast, provides approx- gives good speedups when the number of RoIs is large. imate scale-invariance to the network through an image pyramid. At test-time, the image pyramid is used to ap- 4. Main results proximately scale-normalize each object proposal. During Three main results support this paper’s contributions: multi-scale training, we randomly sample a pyramid scale each time an image is sampled, following [11], as a form of 1. State-of-the-art mAP on VOC07, 2010, and 2012 data augmentation. We experiment with multi-scale train- 2. Fast training and testing compared to R-CNN, SPPnet ing for smaller networks only, due to GPU memory limits. 3. Fine-tuning conv layers in VGG16 improves mAP 3. Fast R-CNN detection 4.1. Experimental setup Once a Fast R-CNN network is fine-tuned, detection Our experiments use three pre-trained ImageNet models amounts to little more than running a forward pass (assum- that are available online.2 The first is the CaffeNet (essen- ing object proposals are pre-computed). The network takes tially AlexNet [14]) from R-CNN [9]. We alternatively refer as input an image (or an image pyramid, encoded as a list of images) and a list of R object proposals to score. At 2 https://github.com/BVLC/caffe/wiki/Model-Zoo
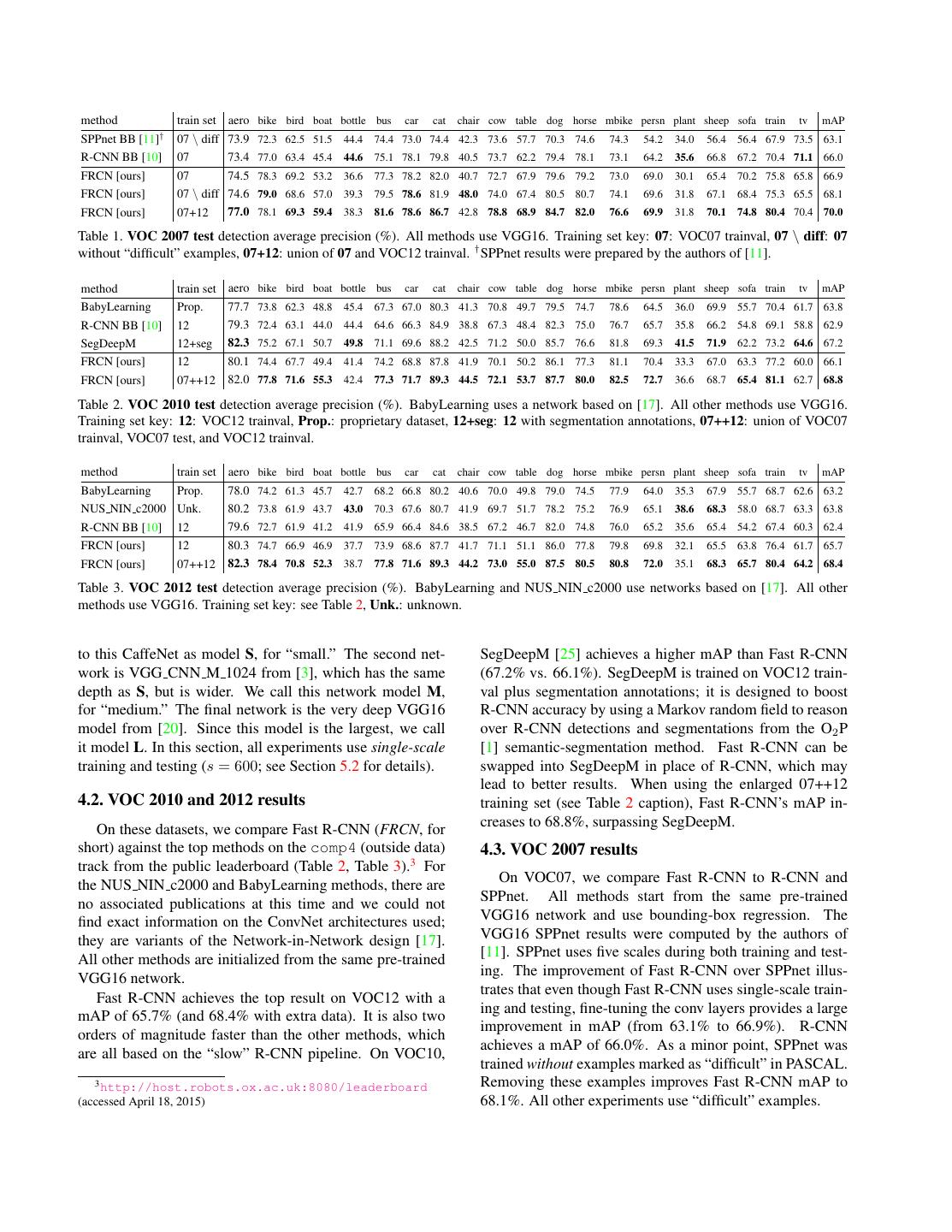
5 .method train set aero bike bird boat bottle bus car cat chair cow table dog horse mbike persn plant sheep sofa train tv mAP † SPPnet BB [11] 07 \ diff 73.9 72.3 62.5 51.5 44.4 74.4 73.0 74.4 42.3 73.6 57.7 70.3 74.6 74.3 54.2 34.0 56.4 56.4 67.9 73.5 63.1 R-CNN BB [10] 07 73.4 77.0 63.4 45.4 44.6 75.1 78.1 79.8 40.5 73.7 62.2 79.4 78.1 73.1 64.2 35.6 66.8 67.2 70.4 71.1 66.0 FRCN [ours] 07 74.5 78.3 69.2 53.2 36.6 77.3 78.2 82.0 40.7 72.7 67.9 79.6 79.2 73.0 69.0 30.1 65.4 70.2 75.8 65.8 66.9 FRCN [ours] 07 \ diff 74.6 79.0 68.6 57.0 39.3 79.5 78.6 81.9 48.0 74.0 67.4 80.5 80.7 74.1 69.6 31.8 67.1 68.4 75.3 65.5 68.1 FRCN [ours] 07+12 77.0 78.1 69.3 59.4 38.3 81.6 78.6 86.7 42.8 78.8 68.9 84.7 82.0 76.6 69.9 31.8 70.1 74.8 80.4 70.4 70.0 Table 1. VOC 2007 test detection average precision (%). All methods use VGG16. Training set key: 07: VOC07 trainval, 07 \ diff: 07 without “difficult” examples, 07+12: union of 07 and VOC12 trainval. † SPPnet results were prepared by the authors of [11]. method train set aero bike bird boat bottle bus car cat chair cow table dog horse mbike persn plant sheep sofa train tv mAP BabyLearning Prop. 77.7 73.8 62.3 48.8 45.4 67.3 67.0 80.3 41.3 70.8 49.7 79.5 74.7 78.6 64.5 36.0 69.9 55.7 70.4 61.7 63.8 R-CNN BB [10] 12 79.3 72.4 63.1 44.0 44.4 64.6 66.3 84.9 38.8 67.3 48.4 82.3 75.0 76.7 65.7 35.8 66.2 54.8 69.1 58.8 62.9 SegDeepM 12+seg 82.3 75.2 67.1 50.7 49.8 71.1 69.6 88.2 42.5 71.2 50.0 85.7 76.6 81.8 69.3 41.5 71.9 62.2 73.2 64.6 67.2 FRCN [ours] 12 80.1 74.4 67.7 49.4 41.4 74.2 68.8 87.8 41.9 70.1 50.2 86.1 77.3 81.1 70.4 33.3 67.0 63.3 77.2 60.0 66.1 FRCN [ours] 07++12 82.0 77.8 71.6 55.3 42.4 77.3 71.7 89.3 44.5 72.1 53.7 87.7 80.0 82.5 72.7 36.6 68.7 65.4 81.1 62.7 68.8 Table 2. VOC 2010 test detection average precision (%). BabyLearning uses a network based on [17]. All other methods use VGG16. Training set key: 12: VOC12 trainval, Prop.: proprietary dataset, 12+seg: 12 with segmentation annotations, 07++12: union of VOC07 trainval, VOC07 test, and VOC12 trainval. method train set aero bike bird boat bottle bus car cat chair cow table dog horse mbike persn plant sheep sofa train tv mAP BabyLearning Prop. 78.0 74.2 61.3 45.7 42.7 68.2 66.8 80.2 40.6 70.0 49.8 79.0 74.5 77.9 64.0 35.3 67.9 55.7 68.7 62.6 63.2 NUS NIN c2000 Unk. 80.2 73.8 61.9 43.7 43.0 70.3 67.6 80.7 41.9 69.7 51.7 78.2 75.2 76.9 65.1 38.6 68.3 58.0 68.7 63.3 63.8 R-CNN BB [10] 12 79.6 72.7 61.9 41.2 41.9 65.9 66.4 84.6 38.5 67.2 46.7 82.0 74.8 76.0 65.2 35.6 65.4 54.2 67.4 60.3 62.4 FRCN [ours] 12 80.3 74.7 66.9 46.9 37.7 73.9 68.6 87.7 41.7 71.1 51.1 86.0 77.8 79.8 69.8 32.1 65.5 63.8 76.4 61.7 65.7 FRCN [ours] 07++12 82.3 78.4 70.8 52.3 38.7 77.8 71.6 89.3 44.2 73.0 55.0 87.5 80.5 80.8 72.0 35.1 68.3 65.7 80.4 64.2 68.4 Table 3. VOC 2012 test detection average precision (%). BabyLearning and NUS NIN c2000 use networks based on [17]. All other methods use VGG16. Training set key: see Table 2, Unk.: unknown. to this CaffeNet as model S, for “small.” The second net- SegDeepM [25] achieves a higher mAP than Fast R-CNN work is VGG CNN M 1024 from [3], which has the same (67.2% vs. 66.1%). SegDeepM is trained on VOC12 train- depth as S, but is wider. We call this network model M, val plus segmentation annotations; it is designed to boost for “medium.” The final network is the very deep VGG16 R-CNN accuracy by using a Markov random field to reason model from [20]. Since this model is the largest, we call over R-CNN detections and segmentations from the O2 P it model L. In this section, all experiments use single-scale [1] semantic-segmentation method. Fast R-CNN can be training and testing (s = 600; see Section 5.2 for details). swapped into SegDeepM in place of R-CNN, which may lead to better results. When using the enlarged 07++12 4.2. VOC 2010 and 2012 results training set (see Table 2 caption), Fast R-CNN’s mAP in- On these datasets, we compare Fast R-CNN (FRCN, for creases to 68.8%, surpassing SegDeepM. short) against the top methods on the comp4 (outside data) 4.3. VOC 2007 results track from the public leaderboard (Table 2, Table 3).3 For the NUS NIN c2000 and BabyLearning methods, there are On VOC07, we compare Fast R-CNN to R-CNN and no associated publications at this time and we could not SPPnet. All methods start from the same pre-trained find exact information on the ConvNet architectures used; VGG16 network and use bounding-box regression. The they are variants of the Network-in-Network design [17]. VGG16 SPPnet results were computed by the authors of All other methods are initialized from the same pre-trained [11]. SPPnet uses five scales during both training and test- VGG16 network. ing. The improvement of Fast R-CNN over SPPnet illus- trates that even though Fast R-CNN uses single-scale train- Fast R-CNN achieves the top result on VOC12 with a ing and testing, fine-tuning the conv layers provides a large mAP of 65.7% (and 68.4% with extra data). It is also two improvement in mAP (from 63.1% to 66.9%). R-CNN orders of magnitude faster than the other methods, which achieves a mAP of 66.0%. As a minor point, SPPnet was are all based on the “slow” R-CNN pipeline. On VOC10, trained without examples marked as “difficult” in PASCAL. 3 http://host.robots.ox.ac.uk:8080/leaderboard Removing these examples improves Fast R-CNN mAP to (accessed April 18, 2015) 68.1%. All other experiments use “difficult” examples.
6 .4.4. Training and testing time 4.5. Which layers to fine-tune? Fast training and testing times are our second main re- For the less deep networks considered in the SPPnet pa- sult. Table 4 compares training time (hours), testing rate per [11], fine-tuning only the fully connected layers ap- (seconds per image), and mAP on VOC07 between Fast R- peared to be sufficient for good accuracy. We hypothesized CNN, R-CNN, and SPPnet. For VGG16, Fast R-CNN pro- that this result would not hold for very deep networks. To cesses images 146× faster than R-CNN without truncated validate that fine-tuning the conv layers is important for SVD and 213× faster with it. Training time is reduced by VGG16, we use Fast R-CNN to fine-tune, but freeze the 9×, from 84 hours to 9.5. Compared to SPPnet, Fast R- thirteen conv layers so that only the fully connected layers CNN trains VGG16 2.7× faster (in 9.5 vs. 25.5 hours) and learn. This ablation emulates single-scale SPPnet training tests 7× faster without truncated SVD or 10× faster with it. and decreases mAP from 66.9% to 61.4% (Table 5). This Fast R-CNN also eliminates hundreds of gigabytes of disk experiment verifies our hypothesis: training through the RoI storage, because it does not cache features. pooling layer is important for very deep nets. Fast R-CNN R-CNN SPPnet layers that are fine-tuned in model L SPPnet L † S M L S M L L ≥ fc6 ≥ conv3 1 ≥ conv2 1 ≥ fc6 train time (h) 1.2 2.0 9.5 22 28 84 25 VOC07 mAP 61.4 66.9 67.2 63.1 train speedup 18.3× 14.0× 8.8× 1× 1× 1× 3.4× test rate (s/im) 0.32 0.32 0.32 2.3 test rate (s/im) 0.10 0.15 0.32 9.8 12.1 47.0 2.3 Table 5. Effect of restricting which layers are fine-tuned for with SVD 0.06 0.08 0.22 - - - - VGG16. Fine-tuning ≥ fc6 emulates the SPPnet training algo- test speedup 98× 80× 146× 1× 1× 1× 20× rithm [11], but using a single scale. SPPnet L results were ob- with SVD 169× 150× 213× - - - - tained using five scales, at a significant (7×) speed cost. VOC07 mAP 57.1 59.2 66.9 58.5 60.2 66.0 63.1 Does this mean that all conv layers should be fine-tuned? with SVD 56.5 58.7 66.6 - - - - In short, no. In the smaller networks (S and M) we find Table 4. Runtime comparison between the same models in Fast R- that conv1 is generic and task independent (a well-known CNN, R-CNN, and SPPnet. Fast R-CNN uses single-scale mode. fact [14]). Allowing conv1 to learn, or not, has no mean- SPPnet uses the five scales specified in [11]. † Timing provided by ingful effect on mAP. For VGG16, we found it only nec- the authors of [11]. Times were measured on an Nvidia K40 GPU. essary to update layers from conv3 1 and up (9 of the 13 conv layers). This observation is pragmatic: (1) updating Truncated SVD. Truncated SVD can reduce detection from conv2 1 slows training by 1.3× (12.5 vs. 9.5 hours) time by more than 30% with only a small (0.3 percent- compared to learning from conv3 1; and (2) updating from age point) drop in mAP and without needing to perform conv1 1 over-runs GPU memory. The difference in mAP additional fine-tuning after model compression. Fig. 2 il- when learning from conv2 1 up was only +0.3 points (Ta- lustrates how using the top 1024 singular values from the ble 5, last column). All Fast R-CNN results in this paper 25088 × 4096 matrix in VGG16’s fc6 layer and the top 256 using VGG16 fine-tune layers conv3 1 and up; all experi- singular values from the 4096 × 4096 fc7 layer reduces run- ments with models S and M fine-tune layers conv2 and up. time with little loss in mAP. Further speed-ups are possi- ble with smaller drops in mAP if one fine-tunes again after 5. Design evaluation compression. We conducted experiments to understand how Fast R- Forward pass timing Forward pass timing (SVD) CNN compares to R-CNN and SPPnet, as well as to eval- mAP 66.9% @ 320ms / image mAP 66.6% @ 223ms / image uate design decisions. Following best practices, we per- fc6 fc6 formed these experiments on the PASCAL VOC07 dataset. 38.7% (122ms) 17.5% (37ms) other other 5.1% (11ms) 5.1. Does multi-task training help? 3.5% (11ms) roi_pool5 roi_pool5 5.4% (17ms) 7.9% (17ms) 1.7% (4ms) fc7 Multi-task training is convenient because it avoids man- 6.2% (20ms) fc7 aging a pipeline of sequentially-trained tasks. But it also has 67.8% (143ms) the potential to improve results because the tasks influence 46.3% (146ms) conv each other through a shared representation (the ConvNet) conv [2]. Does multi-task training improve object detection ac- Figure 2. Timing for VGG16 before and after truncated SVD. Be- curacy in Fast R-CNN? fore SVD, fully connected layers fc6 and fc7 take 45% of the time. To test this question, we train baseline networks that use only the classification loss, Lcls , in Eq. 1 (i.e., setting
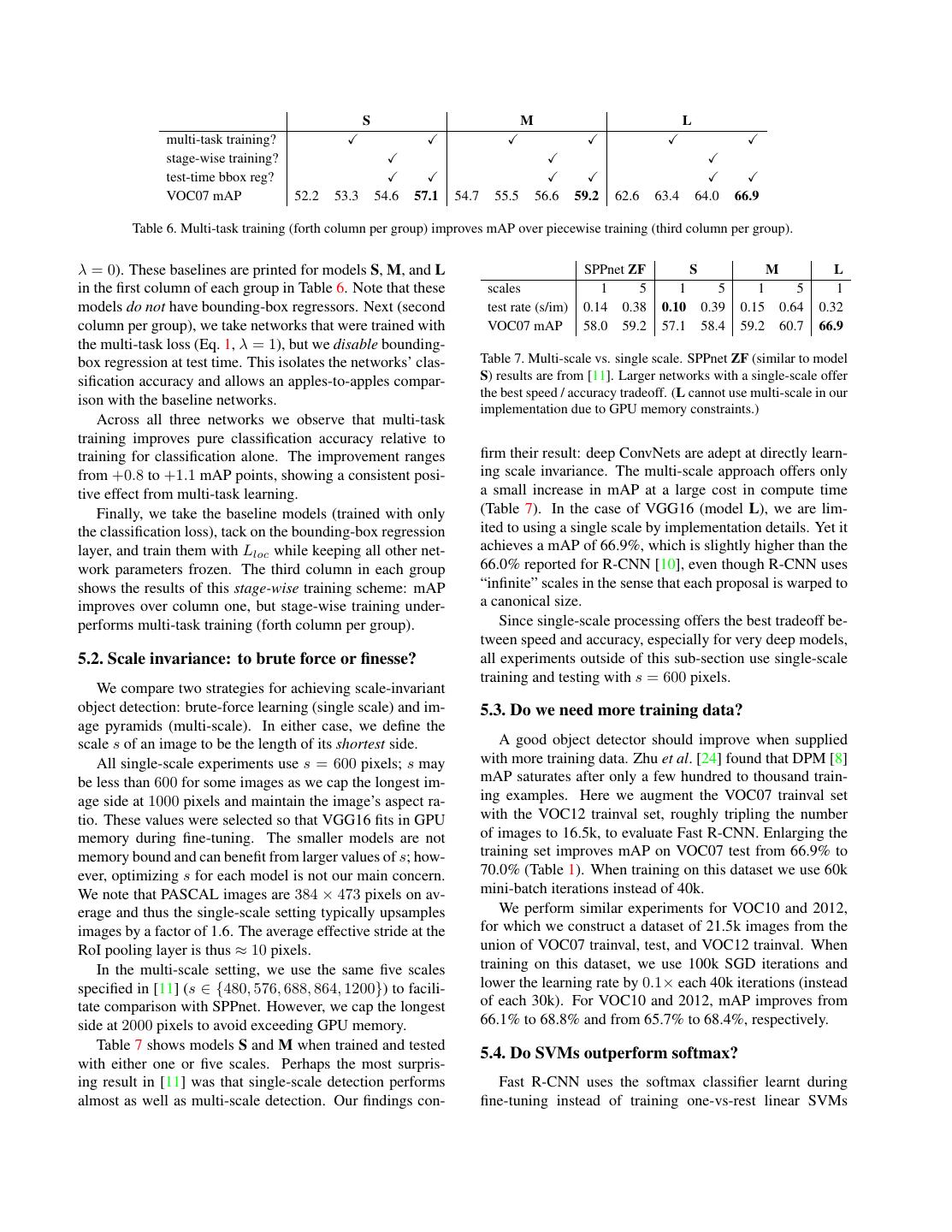
7 . S M L multi-task training? stage-wise training? test-time bbox reg? VOC07 mAP 52.2 53.3 54.6 57.1 54.7 55.5 56.6 59.2 62.6 63.4 64.0 66.9 Table 6. Multi-task training (forth column per group) improves mAP over piecewise training (third column per group). λ = 0). These baselines are printed for models S, M, and L SPPnet ZF S M L in the first column of each group in Table 6. Note that these scales 1 5 1 5 1 5 1 models do not have bounding-box regressors. Next (second test rate (s/im) 0.14 0.38 0.10 0.39 0.15 0.64 0.32 column per group), we take networks that were trained with VOC07 mAP 58.0 59.2 57.1 58.4 59.2 60.7 66.9 the multi-task loss (Eq. 1, λ = 1), but we disable bounding- box regression at test time. This isolates the networks’ clas- Table 7. Multi-scale vs. single scale. SPPnet ZF (similar to model sification accuracy and allows an apples-to-apples compar- S) results are from [11]. Larger networks with a single-scale offer the best speed / accuracy tradeoff. (L cannot use multi-scale in our ison with the baseline networks. implementation due to GPU memory constraints.) Across all three networks we observe that multi-task training improves pure classification accuracy relative to training for classification alone. The improvement ranges firm their result: deep ConvNets are adept at directly learn- from +0.8 to +1.1 mAP points, showing a consistent posi- ing scale invariance. The multi-scale approach offers only tive effect from multi-task learning. a small increase in mAP at a large cost in compute time Finally, we take the baseline models (trained with only (Table 7). In the case of VGG16 (model L), we are lim- the classification loss), tack on the bounding-box regression ited to using a single scale by implementation details. Yet it layer, and train them with Lloc while keeping all other net- achieves a mAP of 66.9%, which is slightly higher than the work parameters frozen. The third column in each group 66.0% reported for R-CNN [10], even though R-CNN uses shows the results of this stage-wise training scheme: mAP “infinite” scales in the sense that each proposal is warped to improves over column one, but stage-wise training under- a canonical size. performs multi-task training (forth column per group). Since single-scale processing offers the best tradeoff be- tween speed and accuracy, especially for very deep models, 5.2. Scale invariance: to brute force or finesse? all experiments outside of this sub-section use single-scale training and testing with s = 600 pixels. We compare two strategies for achieving scale-invariant object detection: brute-force learning (single scale) and im- 5.3. Do we need more training data? age pyramids (multi-scale). In either case, we define the scale s of an image to be the length of its shortest side. A good object detector should improve when supplied All single-scale experiments use s = 600 pixels; s may with more training data. Zhu et al. [24] found that DPM [8] be less than 600 for some images as we cap the longest im- mAP saturates after only a few hundred to thousand train- age side at 1000 pixels and maintain the image’s aspect ra- ing examples. Here we augment the VOC07 trainval set tio. These values were selected so that VGG16 fits in GPU with the VOC12 trainval set, roughly tripling the number memory during fine-tuning. The smaller models are not of images to 16.5k, to evaluate Fast R-CNN. Enlarging the memory bound and can benefit from larger values of s; how- training set improves mAP on VOC07 test from 66.9% to ever, optimizing s for each model is not our main concern. 70.0% (Table 1). When training on this dataset we use 60k We note that PASCAL images are 384 × 473 pixels on av- mini-batch iterations instead of 40k. erage and thus the single-scale setting typically upsamples We perform similar experiments for VOC10 and 2012, images by a factor of 1.6. The average effective stride at the for which we construct a dataset of 21.5k images from the RoI pooling layer is thus ≈ 10 pixels. union of VOC07 trainval, test, and VOC12 trainval. When In the multi-scale setting, we use the same five scales training on this dataset, we use 100k SGD iterations and specified in [11] (s ∈ {480, 576, 688, 864, 1200}) to facili- lower the learning rate by 0.1× each 40k iterations (instead tate comparison with SPPnet. However, we cap the longest of each 30k). For VOC10 and 2012, mAP improves from side at 2000 pixels to avoid exceeding GPU memory. 66.1% to 68.8% and from 65.7% to 68.4%, respectively. Table 7 shows models S and M when trained and tested 5.4. Do SVMs outperform softmax? with either one or five scales. Perhaps the most surpris- ing result in [11] was that single-scale detection performs Fast R-CNN uses the softmax classifier learnt during almost as well as multi-scale detection. Our findings con- fine-tuning instead of training one-vs-rest linear SVMs
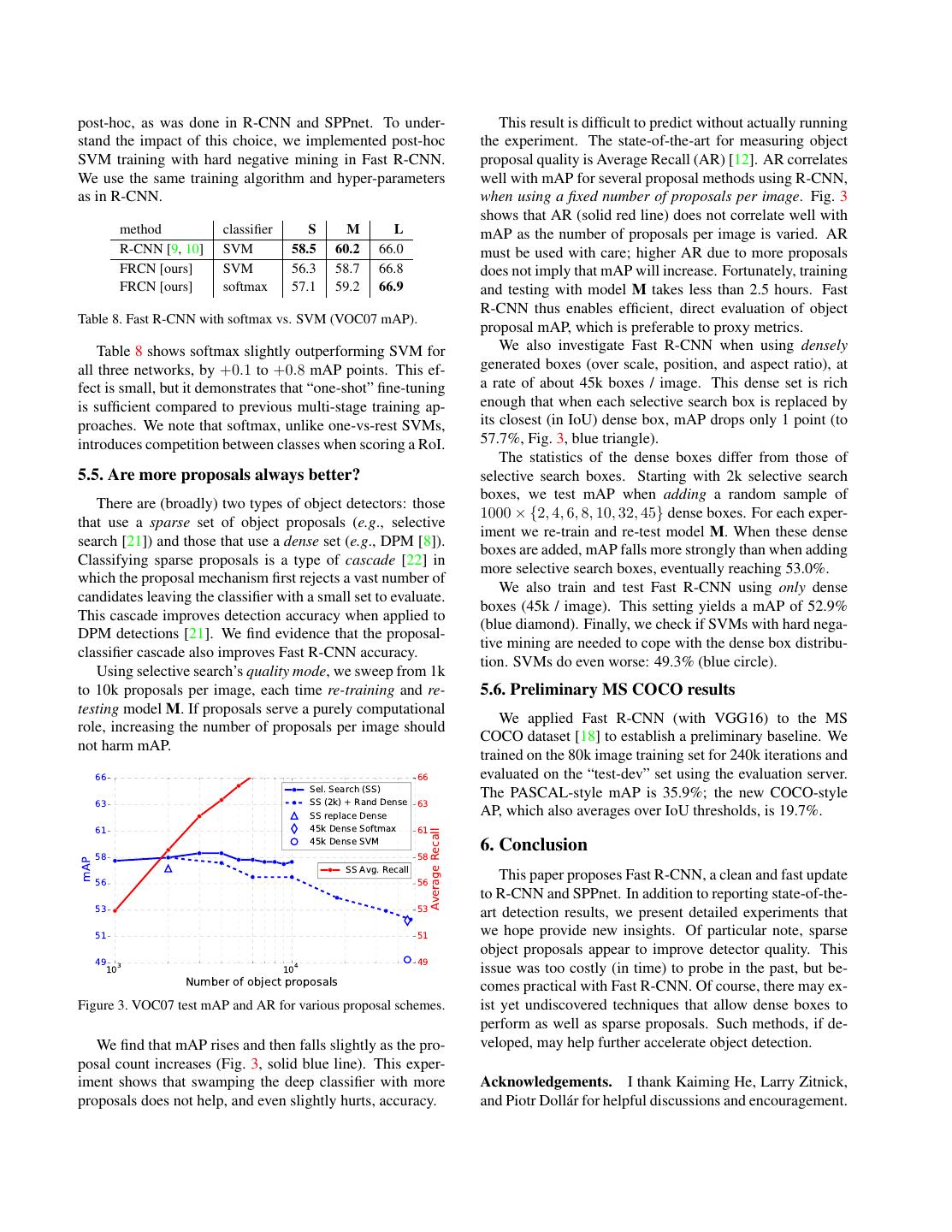
8 .post-hoc, as was done in R-CNN and SPPnet. To under- This result is difficult to predict without actually running stand the impact of this choice, we implemented post-hoc the experiment. The state-of-the-art for measuring object SVM training with hard negative mining in Fast R-CNN. proposal quality is Average Recall (AR) [12]. AR correlates We use the same training algorithm and hyper-parameters well with mAP for several proposal methods using R-CNN, as in R-CNN. when using a fixed number of proposals per image. Fig. 3 shows that AR (solid red line) does not correlate well with method classifier S M L mAP as the number of proposals per image is varied. AR R-CNN [9, 10] SVM 58.5 60.2 66.0 must be used with care; higher AR due to more proposals FRCN [ours] SVM 56.3 58.7 66.8 does not imply that mAP will increase. Fortunately, training FRCN [ours] softmax 57.1 59.2 66.9 and testing with model M takes less than 2.5 hours. Fast R-CNN thus enables efficient, direct evaluation of object Table 8. Fast R-CNN with softmax vs. SVM (VOC07 mAP). proposal mAP, which is preferable to proxy metrics. Table 8 shows softmax slightly outperforming SVM for We also investigate Fast R-CNN when using densely all three networks, by +0.1 to +0.8 mAP points. This ef- generated boxes (over scale, position, and aspect ratio), at fect is small, but it demonstrates that “one-shot” fine-tuning a rate of about 45k boxes / image. This dense set is rich is sufficient compared to previous multi-stage training ap- enough that when each selective search box is replaced by proaches. We note that softmax, unlike one-vs-rest SVMs, its closest (in IoU) dense box, mAP drops only 1 point (to introduces competition between classes when scoring a RoI. 57.7%, Fig. 3, blue triangle). The statistics of the dense boxes differ from those of 5.5. Are more proposals always better? selective search boxes. Starting with 2k selective search boxes, we test mAP when adding a random sample of There are (broadly) two types of object detectors: those 1000 × {2, 4, 6, 8, 10, 32, 45} dense boxes. For each exper- that use a sparse set of object proposals (e.g., selective iment we re-train and re-test model M. When these dense search [21]) and those that use a dense set (e.g., DPM [8]). boxes are added, mAP falls more strongly than when adding Classifying sparse proposals is a type of cascade [22] in more selective search boxes, eventually reaching 53.0%. which the proposal mechanism first rejects a vast number of We also train and test Fast R-CNN using only dense candidates leaving the classifier with a small set to evaluate. boxes (45k / image). This setting yields a mAP of 52.9% This cascade improves detection accuracy when applied to (blue diamond). Finally, we check if SVMs with hard nega- DPM detections [21]. We find evidence that the proposal- tive mining are needed to cope with the dense box distribu- classifier cascade also improves Fast R-CNN accuracy. tion. SVMs do even worse: 49.3% (blue circle). Using selective search’s quality mode, we sweep from 1k to 10k proposals per image, each time re-training and re- 5.6. Preliminary MS COCO results testing model M. If proposals serve a purely computational We applied Fast R-CNN (with VGG16) to the MS role, increasing the number of proposals per image should COCO dataset [18] to establish a preliminary baseline. We not harm mAP. trained on the 80k image training set for 240k iterations and 66 66 evaluated on the “test-dev” set using the evaluation server. Sel. Search (SS) The PASCAL-style mAP is 35.9%; the new COCO-style 63 SS (2k) + Rand Dense 63 SS replace Dense AP, which also averages over IoU thresholds, is 19.7%. 61 45k Dense Softmax 61 Average Recall 45k Dense SVM 6. Conclusion 58 58 mAP SS Avg. Recall This paper proposes Fast R-CNN, a clean and fast update 56 56 to R-CNN and SPPnet. In addition to reporting state-of-the- 53 53 art detection results, we present detailed experiments that 51 51 we hope provide new insights. Of particular note, sparse object proposals appear to improve detector quality. This 49 3 49 10 104 issue was too costly (in time) to probe in the past, but be- Number of object proposals comes practical with Fast R-CNN. Of course, there may ex- Figure 3. VOC07 test mAP and AR for various proposal schemes. ist yet undiscovered techniques that allow dense boxes to perform as well as sparse proposals. Such methods, if de- We find that mAP rises and then falls slightly as the pro- veloped, may help further accelerate object detection. posal count increases (Fig. 3, solid blue line). This exper- iment shows that swamping the deep classifier with more Acknowledgements. I thank Kaiming He, Larry Zitnick, proposals does not help, and even slightly hurts, accuracy. and Piotr Doll´ar for helpful discussions and encouragement.
9 .References [19] P. Sermanet, D. Eigen, X. Zhang, M. Mathieu, R. Fergus, and Y. LeCun. OverFeat: Integrated Recognition, Localiza- [1] J. Carreira, R. Caseiro, J. Batista, and C. Sminchisescu. Se- tion and Detection using Convolutional Networks. In ICLR, mantic segmentation with second-order pooling. In ECCV, 2014. 1, 3 2012. 5 [20] K. Simonyan and A. Zisserman. Very deep convolutional [2] R. Caruana. Multitask learning. Machine learning, 28(1), networks for large-scale image recognition. In ICLR, 2015. 1997. 6 1, 5 [3] K. Chatfield, K. Simonyan, A. Vedaldi, and A. Zisserman. [21] J. Uijlings, K. van de Sande, T. Gevers, and A. Smeulders. Return of the devil in the details: Delving deep into convo- Selective search for object recognition. IJCV, 2013. 8 lutional nets. In BMVC, 2014. 5 [22] P. Viola and M. Jones. Rapid object detection using a boosted [4] J. Deng, W. Dong, R. Socher, L.-J. Li, K. Li, and L. Fei- cascade of simple features. In CVPR, 2001. 8 Fei. ImageNet: A large-scale hierarchical image database. [23] J. Xue, J. Li, and Y. Gong. Restructuring of deep neural In CVPR, 2009. 2 network acoustic models with singular value decomposition. [5] E. Denton, W. Zaremba, J. Bruna, Y. LeCun, and R. Fergus. In Interspeech, 2013. 4 Exploiting linear structure within convolutional networks for [24] X. Zhu, C. Vondrick, D. Ramanan, and C. Fowlkes. Do we efficient evaluation. In NIPS, 2014. 4 need more training data or better models for object detec- [6] D. Erhan, C. Szegedy, A. Toshev, and D. Anguelov. Scalable tion? In BMVC, 2012. 7 object detection using deep neural networks. In CVPR, 2014. [25] Y. Zhu, R. Urtasun, R. Salakhutdinov, and S. Fidler. 3 segDeepM: Exploiting segmentation and context in deep [7] M. Everingham, L. Van Gool, C. K. I. Williams, J. Winn, and neural networks for object detection. In CVPR, 2015. 1, A. Zisserman. The PASCAL Visual Object Classes (VOC) 5 Challenge. IJCV, 2010. 1 [8] P. Felzenszwalb, R. Girshick, D. McAllester, and D. Ra- manan. Object detection with discriminatively trained part based models. TPAMI, 2010. 3, 7, 8 [9] R. Girshick, J. Donahue, T. Darrell, and J. Malik. Rich fea- ture hierarchies for accurate object detection and semantic segmentation. In CVPR, 2014. 1, 3, 4, 8 [10] R. Girshick, J. Donahue, T. Darrell, and J. Malik. Region- based convolutional networks for accurate object detection and segmentation. TPAMI, 2015. 5, 7, 8 [11] K. He, X. Zhang, S. Ren, and J. Sun. Spatial pyramid pooling in deep convolutional networks for visual recognition. In ECCV, 2014. 1, 2, 3, 4, 5, 6, 7 [12] J. H. Hosang, R. Benenson, P. Doll´ar, and B. Schiele. What makes for effective detection proposals? arXiv preprint arXiv:1502.05082, 2015. 8 [13] Y. Jia, E. Shelhamer, J. Donahue, S. Karayev, J. Long, R. Gir- shick, S. Guadarrama, and T. Darrell. Caffe: Convolutional architecture for fast feature embedding. In Proc. of the ACM International Conf. on Multimedia, 2014. 2 [14] A. Krizhevsky, I. Sutskever, and G. Hinton. ImageNet clas- sification with deep convolutional neural networks. In NIPS, 2012. 1, 4, 6 [15] S. Lazebnik, C. Schmid, and J. Ponce. Beyond bags of features: Spatial pyramid matching for recognizing natural scene categories. In CVPR, 2006. 1 [16] Y. LeCun, B. Boser, J. Denker, D. Henderson, R. Howard, W. Hubbard, and L. Jackel. Backpropagation applied to handwritten zip code recognition. Neural Comp., 1989. 1 [17] M. Lin, Q. Chen, and S. Yan. Network in network. In ICLR, 2014. 5 [18] T. Lin, M. Maire, S. Belongie, L. Bourdev, R. Girshick, J. Hays, P. Perona, D. Ramanan, P. Doll´ar, and C. L. Zit- nick. Microsoft COCO: common objects in context. arXiv e-prints, arXiv:1405.0312 [cs.CV], 2014. 8
3秒后跳转登录页面
去登陆

