






- 快召唤伙伴们来围观吧
- 微博 QQ QQ空间 贴吧
- 文档嵌入链接
- 复制
- 微信扫一扫分享
- 已成功复制到剪贴板
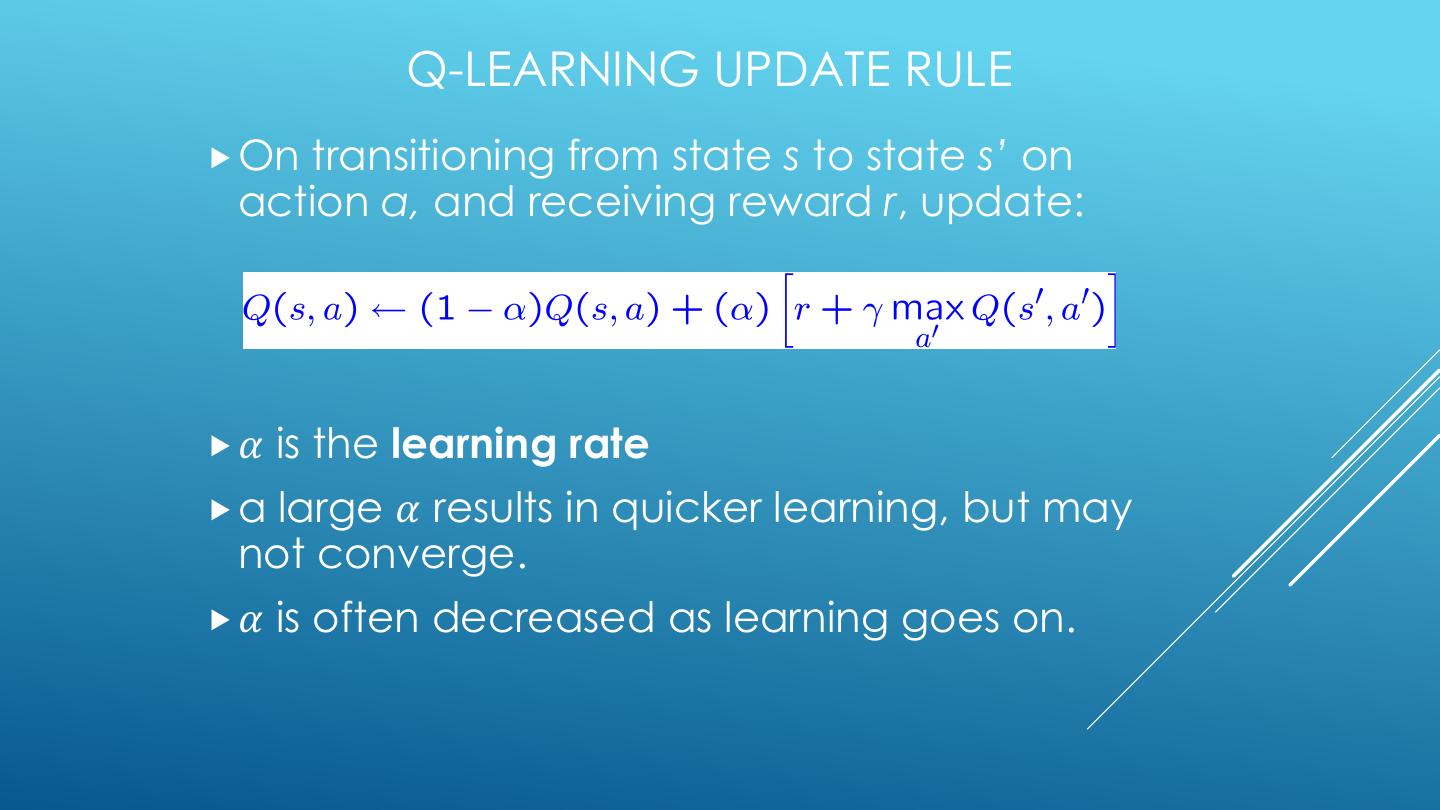
Towards Q-learning
1. Where We Have Been: MDPs
o Types of Machine Learning
o Markov Decision Processes (MDPs)
o 4 MDP Algorithms
2. Where We Have Been: RL
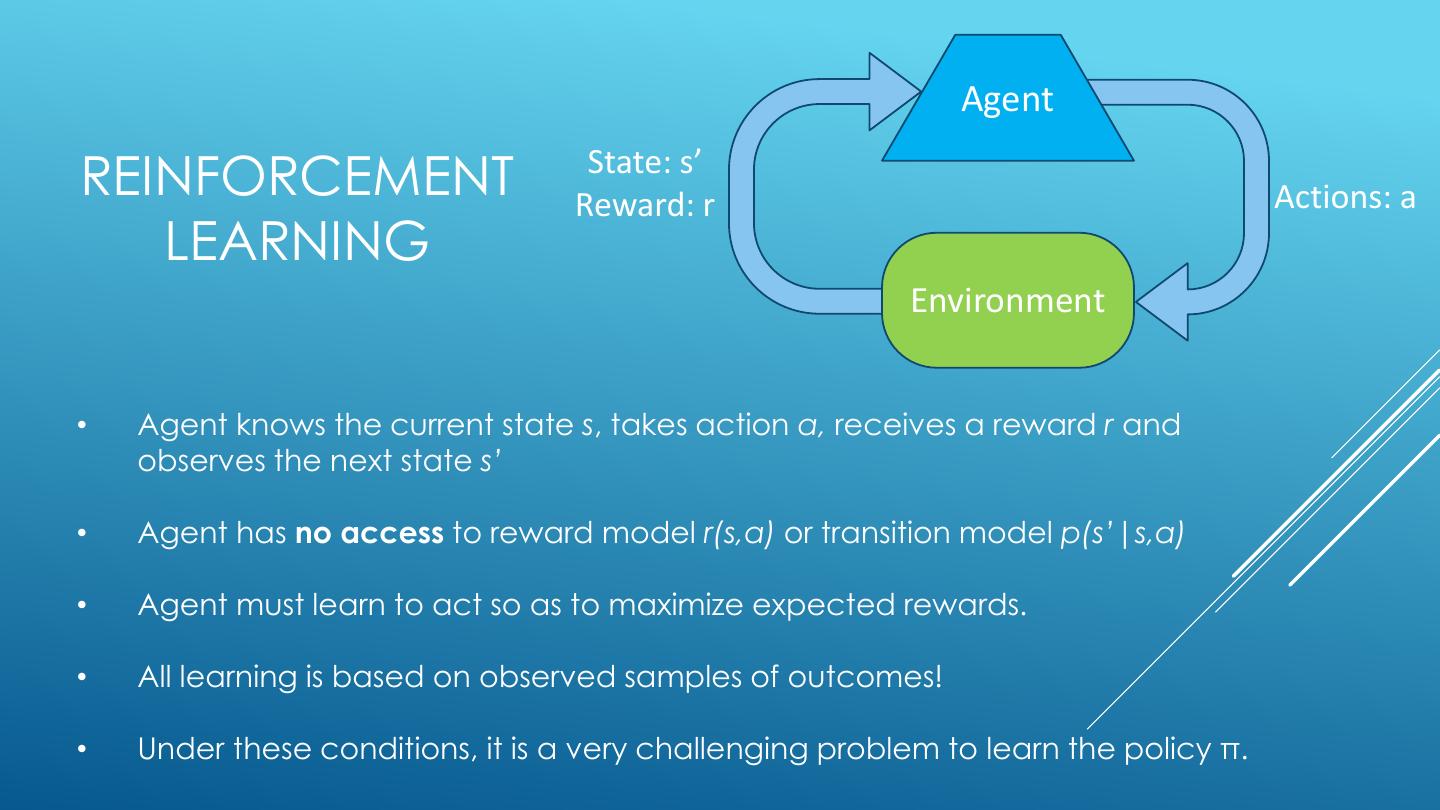
o Reinforcement Learning
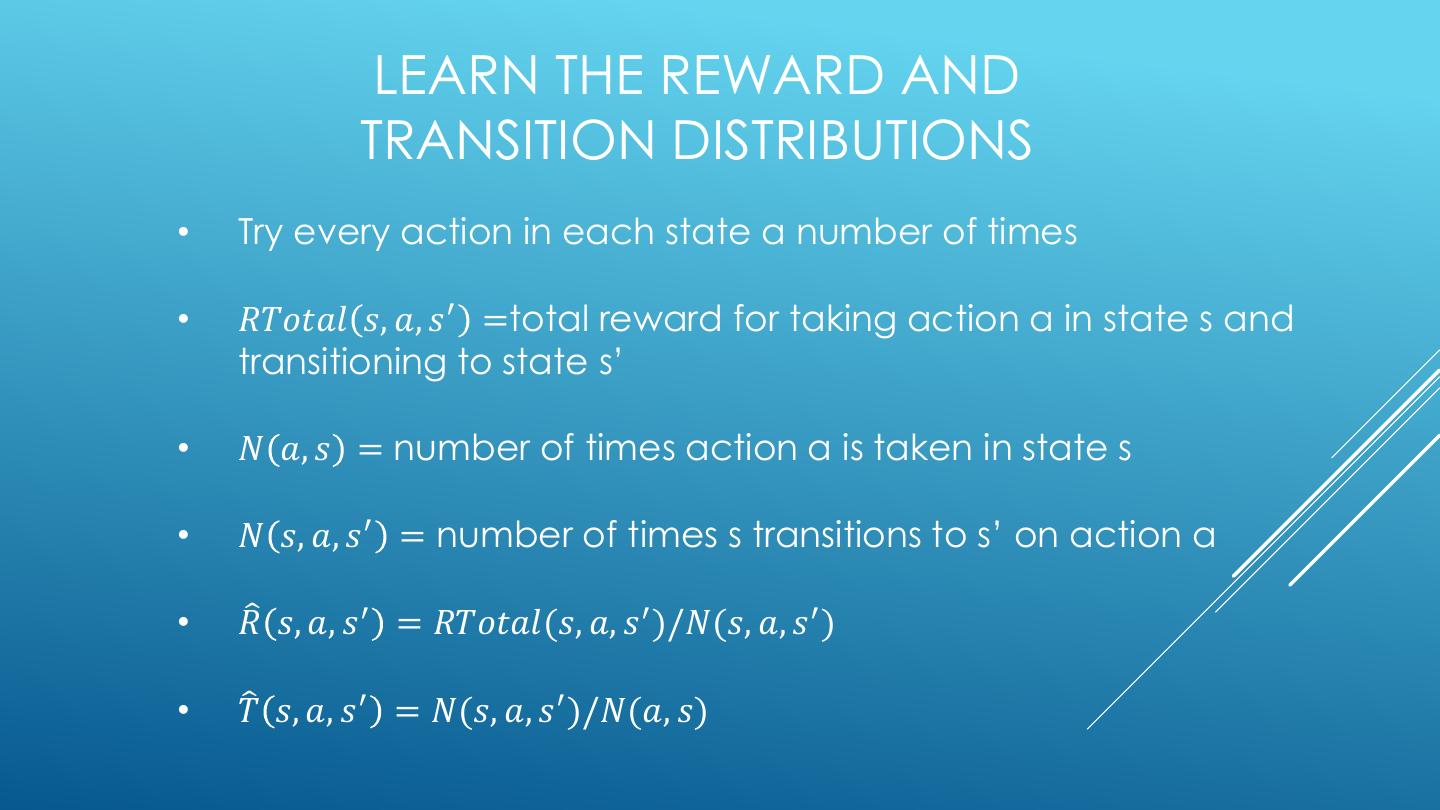
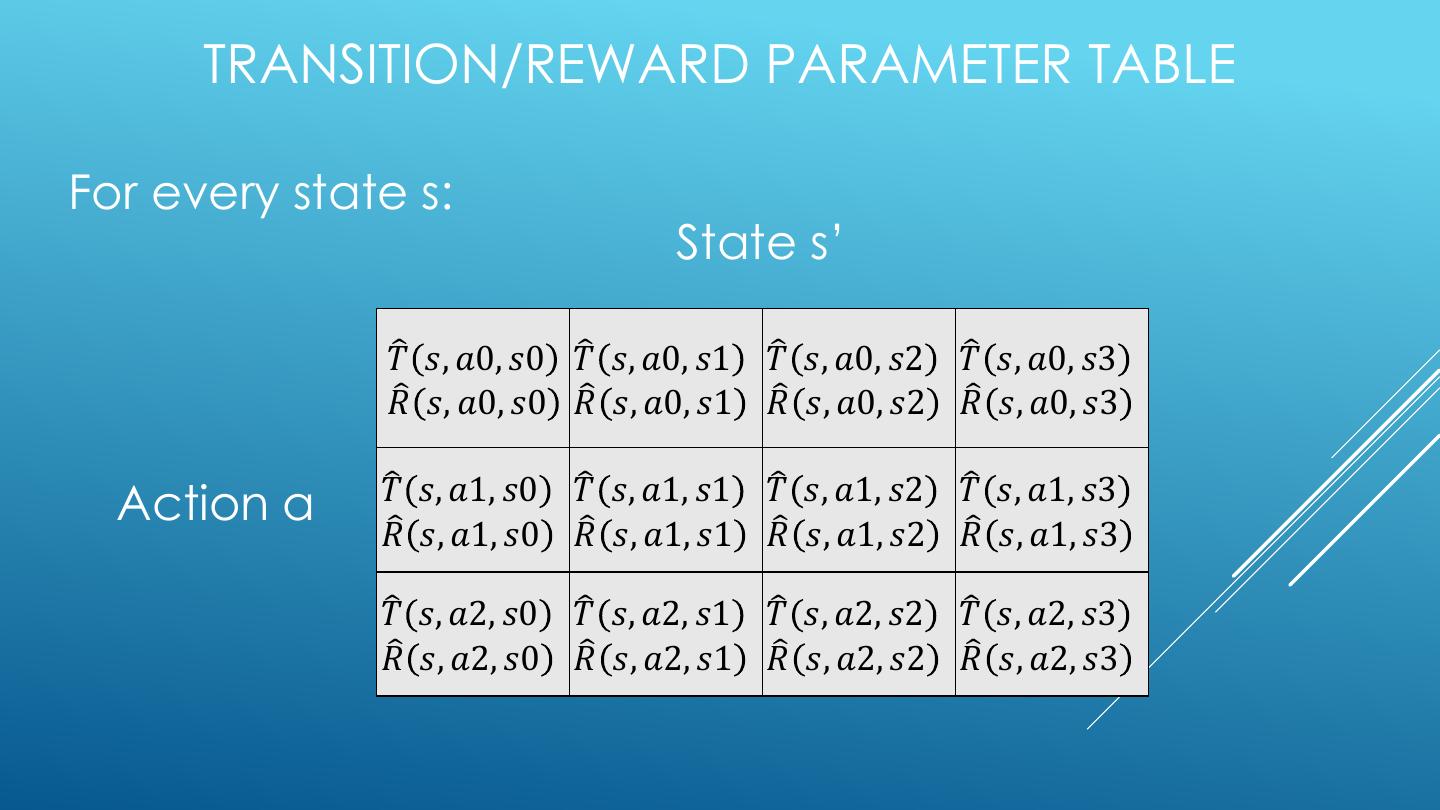
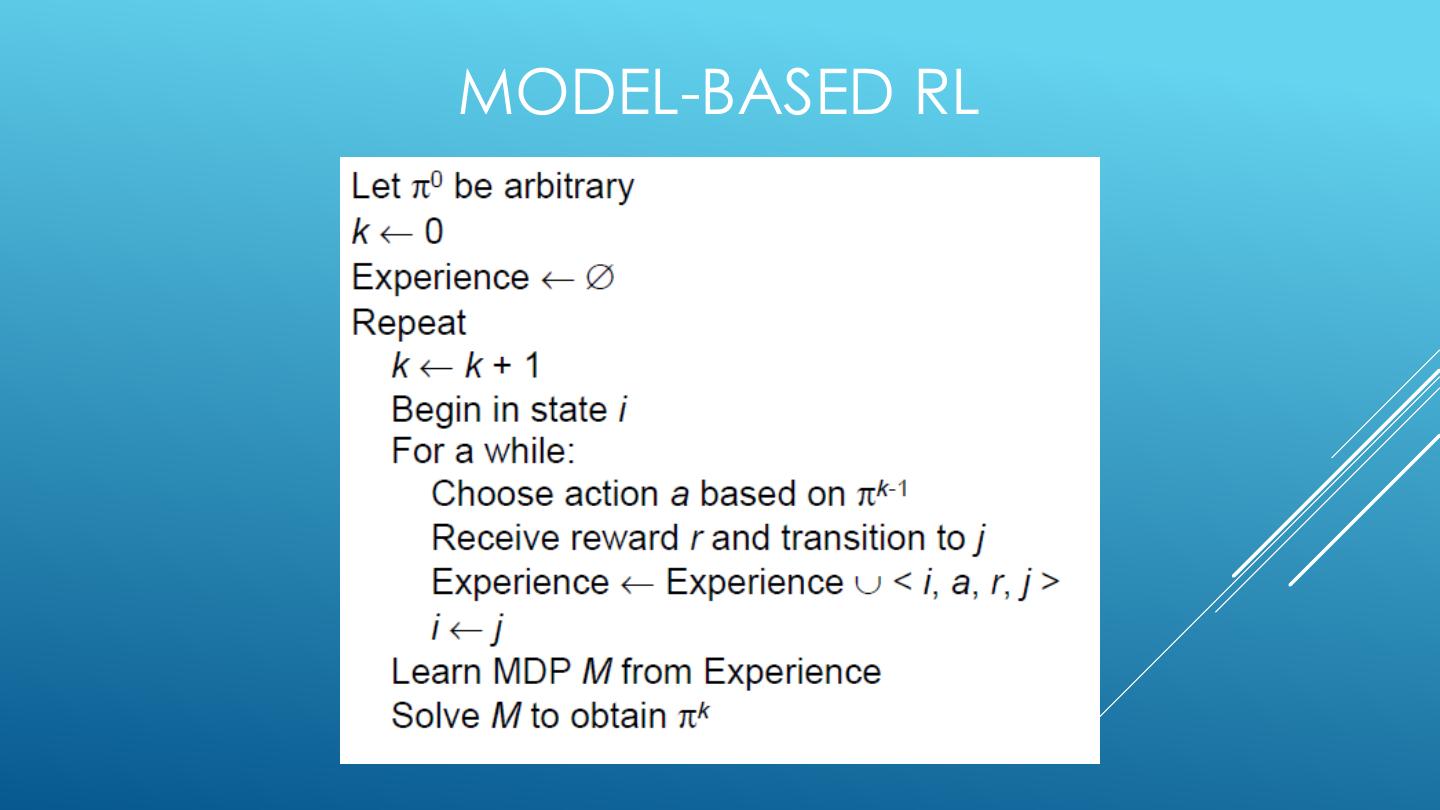
o Model-based RL
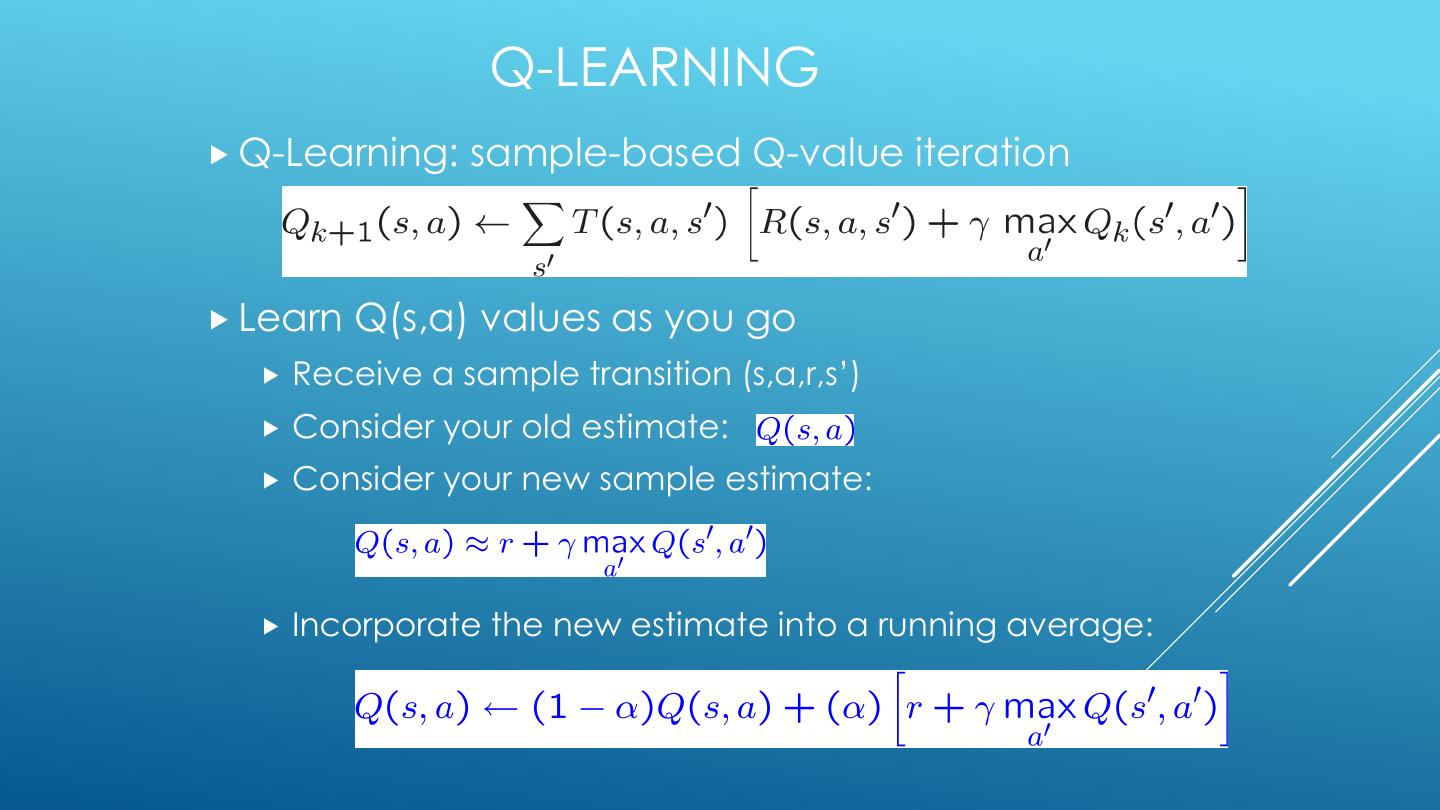
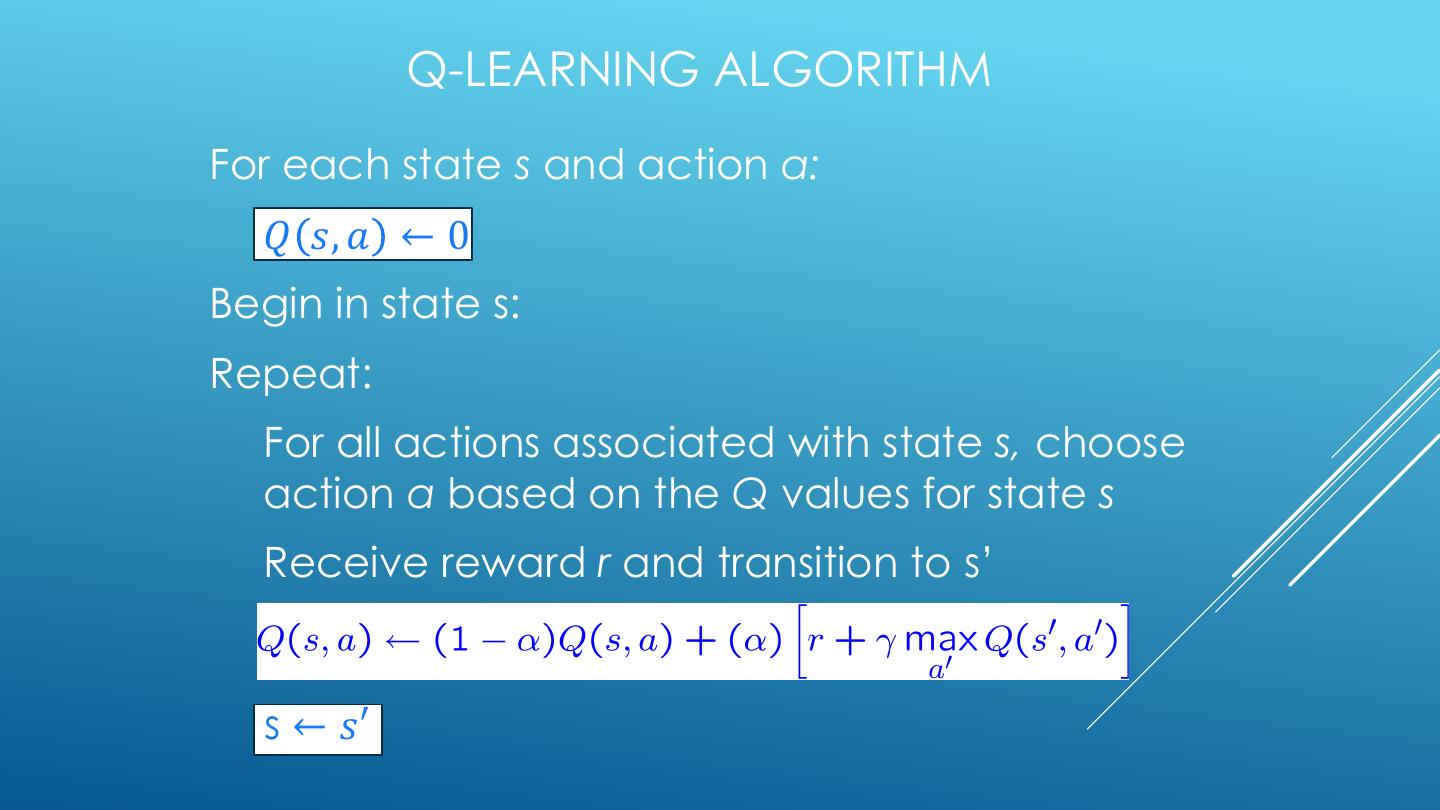
3. Q-Learning
o The Bellman Equations
o States and Q-States
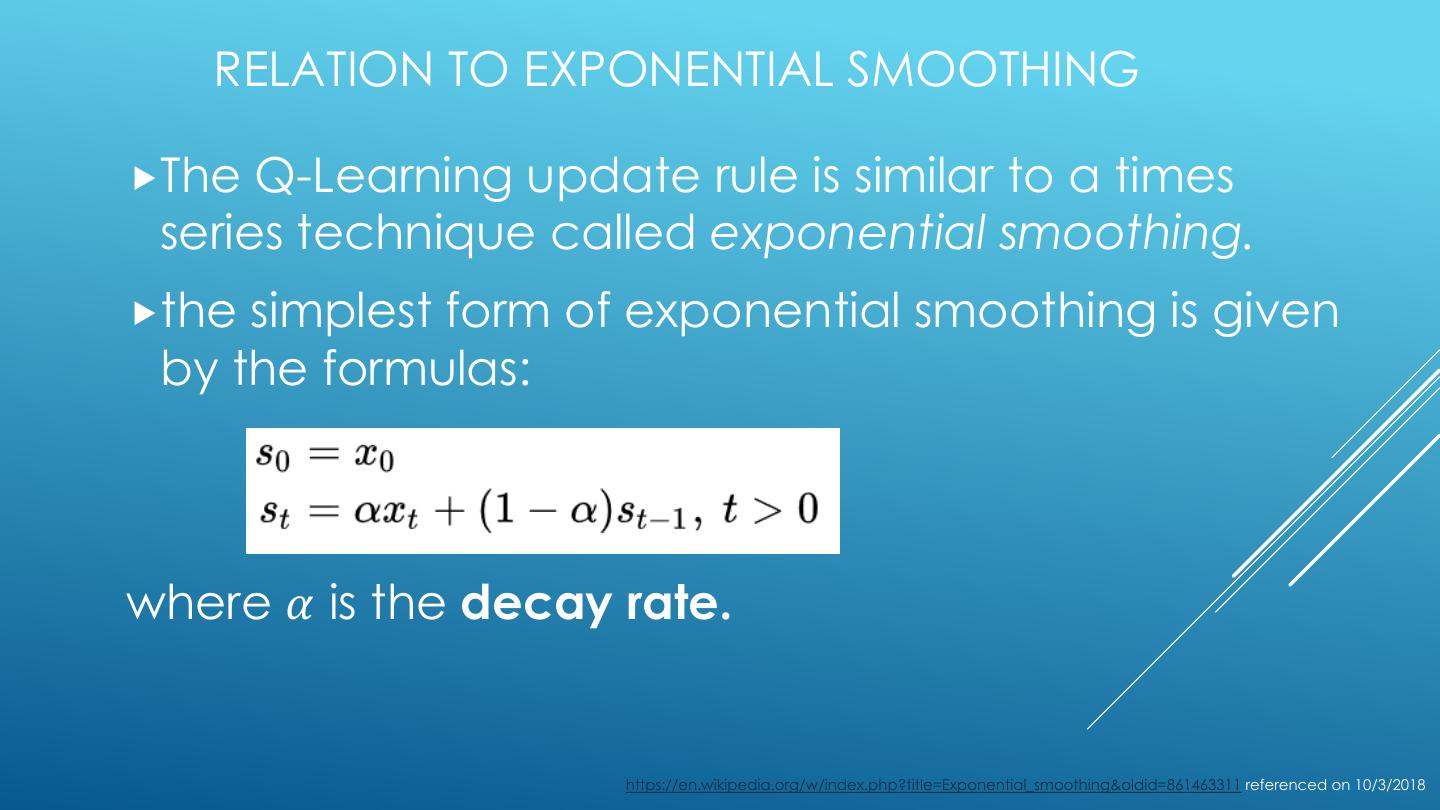
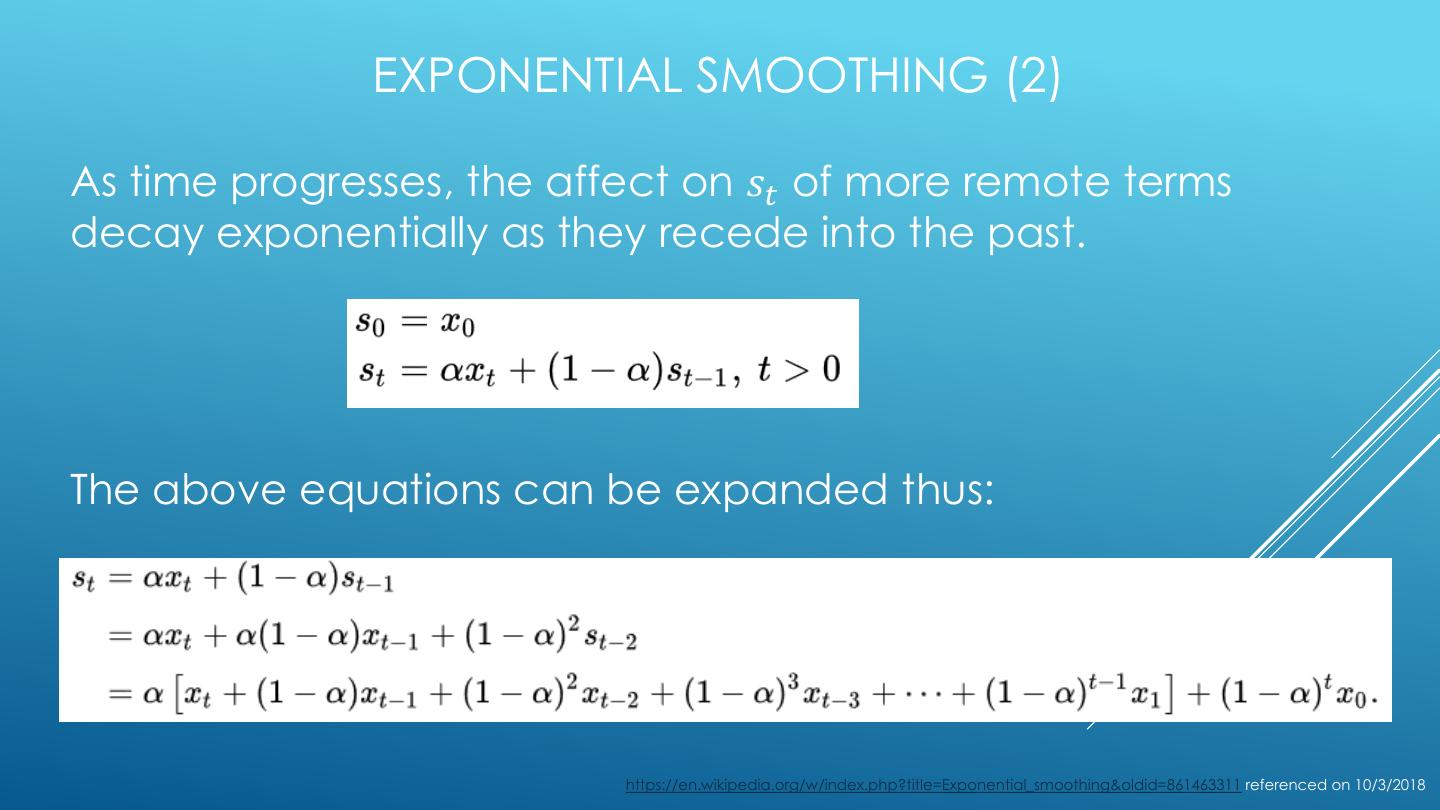
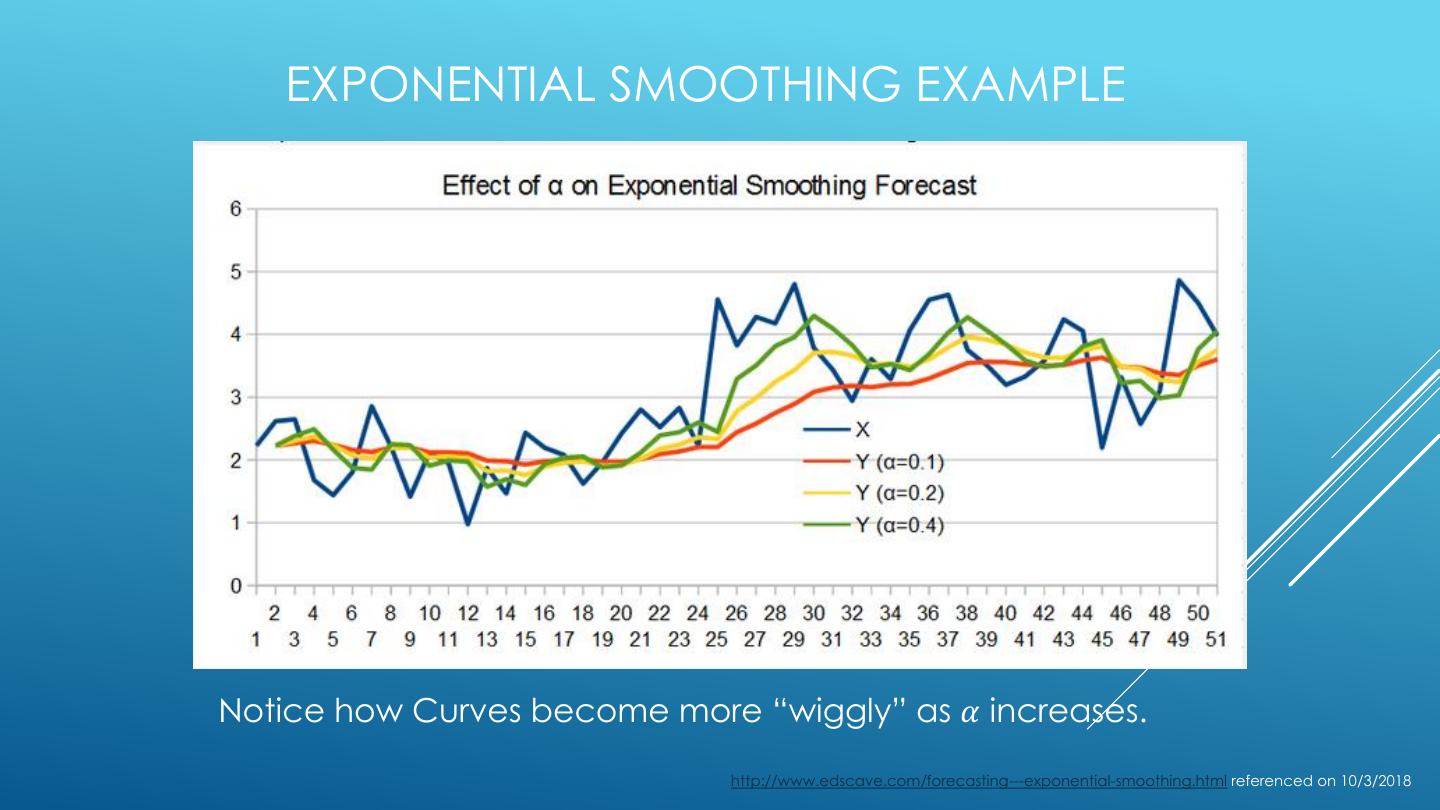
o Exponential Smoothing
展开查看详情
1 .TOWARDS Q-LEARNING
2 . CS181 course at Harvard University: CS181 Intelligent Machines: Perception, Learning and REFERENCES Uncertainty, Sarah Finney, Spring 2009 CS181 Intelligent Machines: Perception, Learning and The material for this Uncertainty, Prof. David C Brooks, Spring 2011 talk is primarily drawn from the slides, notes CS181 – Machine Learning, Prof. Ryan P. Adams, Spring and lectures of these 2014. https://github.com/wihl/cs181-spring2014 courses: CS181 – Machine Learning, Prof. David Parkes, Spring 2017. https://harvard-ml-courses.github.io/cs181-web-2017/ University of California, Berkeley CS188: CS188 – Introduction to Artificial Intelligence, Profs. Dan Klein, Pieter Abbeel, et al. http://ai.berkeley.edu/home.html Stanford course CS229 : CS229 – Machine Learning, Andrew Ng. https://see.stanford.edu/Course/CS229
3 .UC BERKELEY CS188 IS A GREAT RESOURCE • http://ai.berkeley.edu/home.html • Covers: - Search - Constraint Satisfaction - Games - Reinforcement Learning - Bayesian Networks - Surveys Advanced Topics - And more… • Contains: accessible, high quality YouTube videos, PowerPoint slides and homework. • Series of projects based on the video game PacMan. • Material is used in many courses around the country.
4 . 1. Where We Have Been: MDPs o Types of Machine Learning o Markov Decision Processes (MDPs) o 4 MDP Algorithms 2. Where We Have Been: RL o Reinforcement Learning OVERVIEW o Model-based RL 3. Q-Learning o The Bellman Equations o States and Q-States o Exponential Smoothing
5 . TYPES OF MACHINE LEARNING There are (at least) 3 broad categories of machine learning problems: Supervised Learning 𝑫𝒂𝒕𝒂 = 𝒙𝟏 , 𝒚𝟏 , … , 𝒙𝒏 , 𝒚𝒏 e.g., linear regression, decision trees, SVMs Unsupervised Learning 𝑫𝒂𝒕𝒂 = 𝒙𝟏 , , … , 𝒙𝒏 e.g., K-means, HAC, Gaussian mixture models Reinforcement Learning 𝑫𝒂𝒕𝒂 = 𝒔𝟏 , 𝒂𝟏 , 𝒓𝟏 , 𝒔𝟐 , 𝒂𝟐 , 𝒓𝟐 … an agent learns to act in an uncertain environment by training on data that are sequences of state, action, reward.
6 .MARKOV DECISION PROCESSES
7 . MARKOV DECISION PROCESSES • Markov Decision Processes provide a mathematical framework for modeling decision making in situations where outcomes are partly random and partly under the control of a decision maker. • The initial analysis of MDPs assume complete knowledge of states, actions, rewards, transitions, and discounts. <https://en.wikipedia.org/w/index.php?title=Markov_decision_process&oldid=855934986> [accessed 11 September 2018]
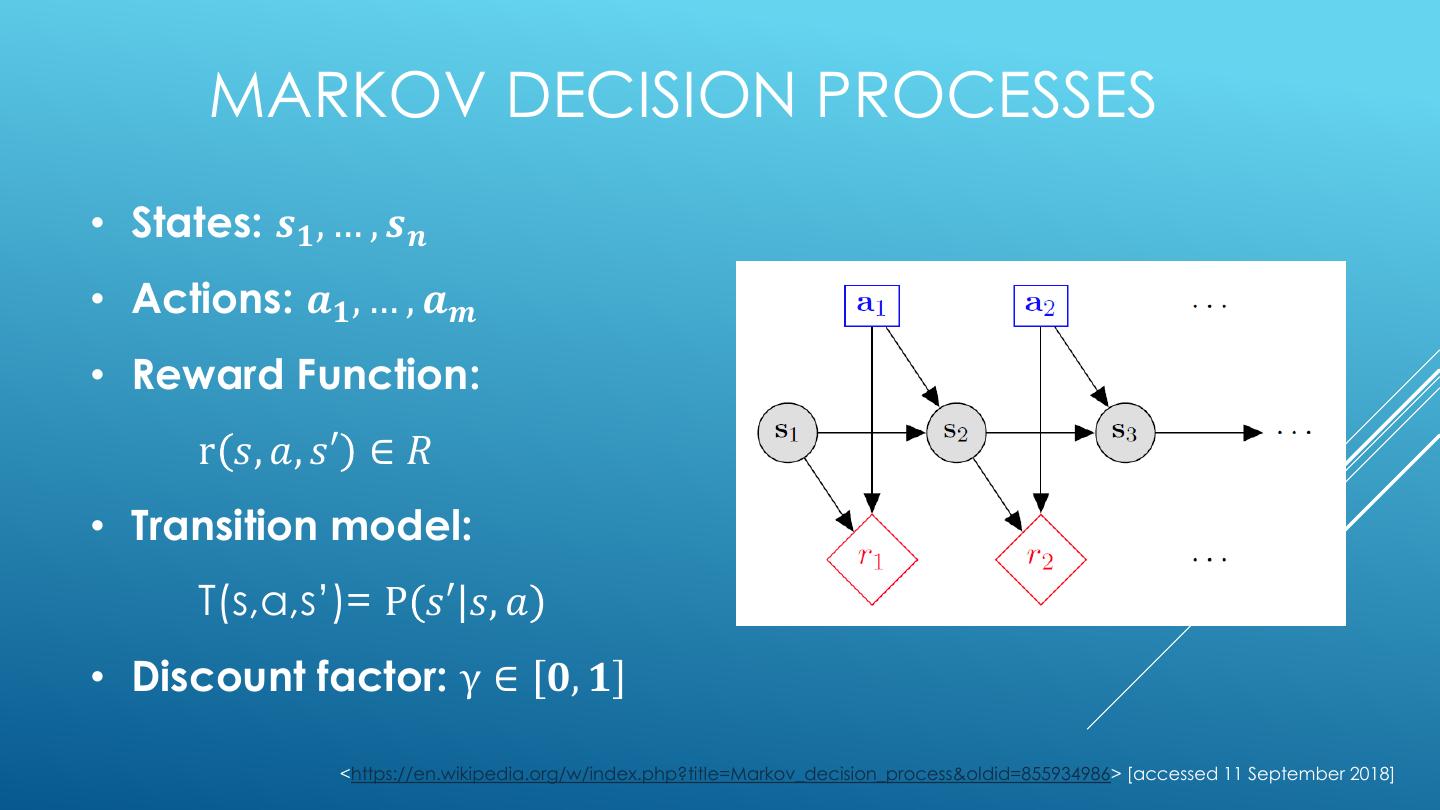
8 . MARKOV DECISION PROCESSES • States: 𝒔𝟏 , … , 𝒔𝒏 • Actions: 𝒂𝟏 , … , 𝒂𝒎 • Reward Function: r 𝑠, 𝑎, 𝑠′ ∈ 𝑅 • Transition model: T(s,a,s’)= P 𝑠′ 𝑠, 𝑎 • Discount factor: γ ∈ 𝟎, 𝟏 <https://en.wikipedia.org/w/index.php?title=Markov_decision_process&oldid=855934986> [accessed 11 September 2018]
9 . WHAT IS MARKOV ABOUT MDPS? “Markov” generally means that given the present state, the future and the past are independent For Markov decision processes, “Markov” means action outcomes depend only on the current state = Andrey Markov (1856-1922) This is just like search, where the successor function only depends on the current state (not the history)
10 . MDP GOAL: FIND AN OPTIMAL POLICY π Insearch problems, we look for an optimal plan, or sequence of actions, from start to a goal For MDPs, we want an optimal policy *: S → A A policy gives an action for each state An optimal policy is one that maximizes expected utility if followed
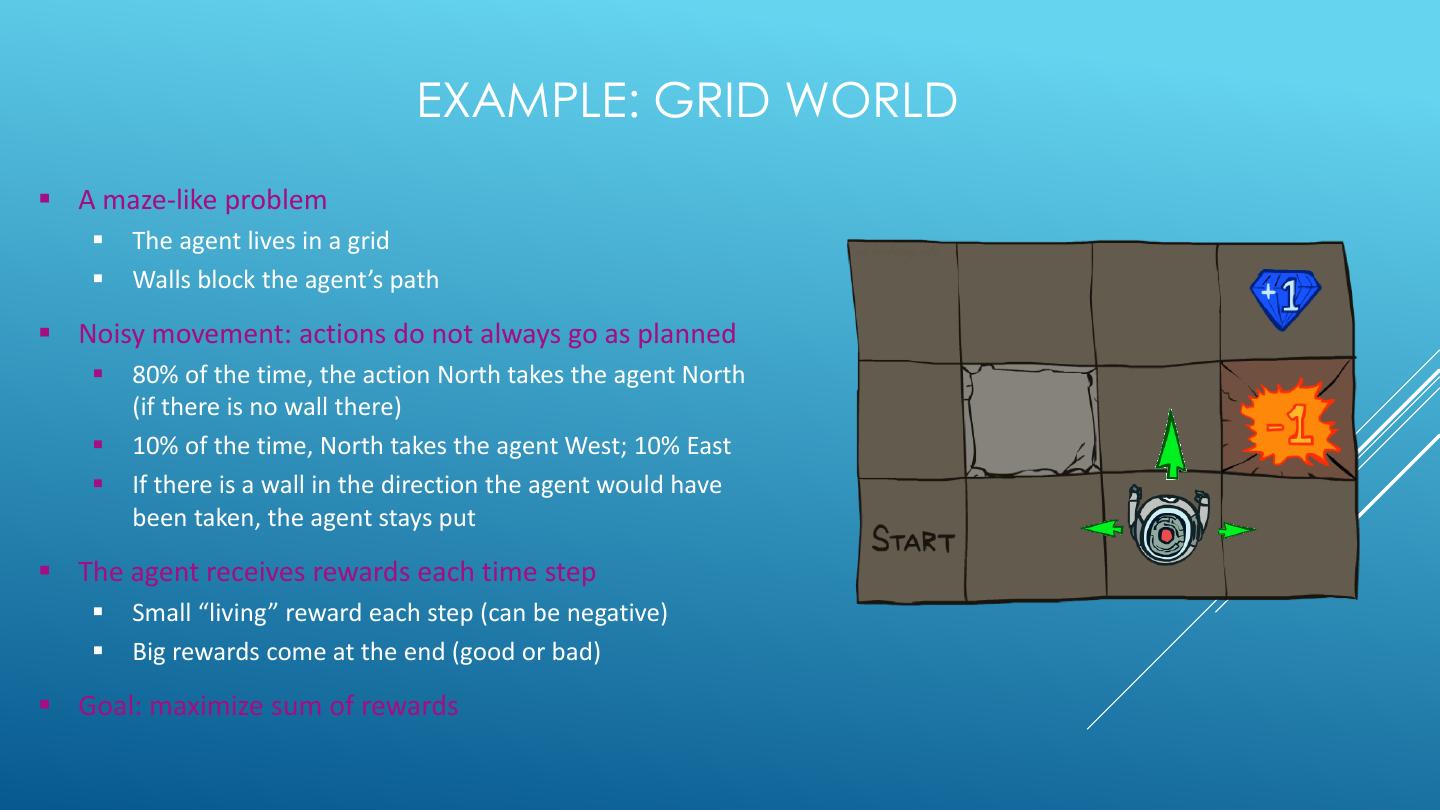
11 . EXAMPLE: GRID WORLD ▪ A maze-like problem ▪ The agent lives in a grid ▪ Walls block the agent’s path ▪ Noisy movement: actions do not always go as planned ▪ 80% of the time, the action North takes the agent North (if there is no wall there) ▪ 10% of the time, North takes the agent West; 10% East ▪ If there is a wall in the direction the agent would have been taken, the agent stays put ▪ The agent receives rewards each time step ▪ Small “living” reward each step (can be negative) ▪ Big rewards come at the end (good or bad) ▪ Goal: maximize sum of rewards
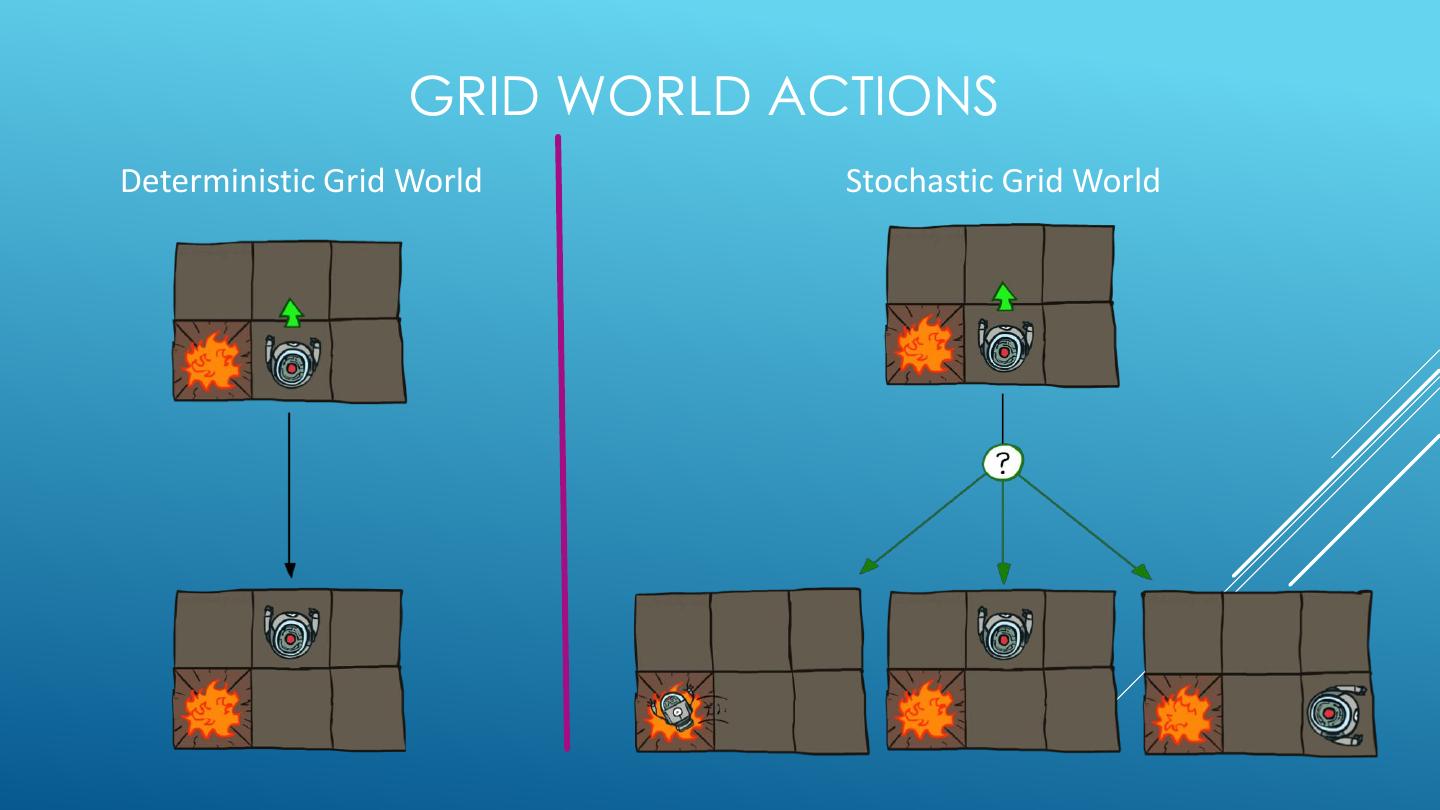
12 . GRID WORLD ACTIONS Deterministic Grid World Stochastic Grid World
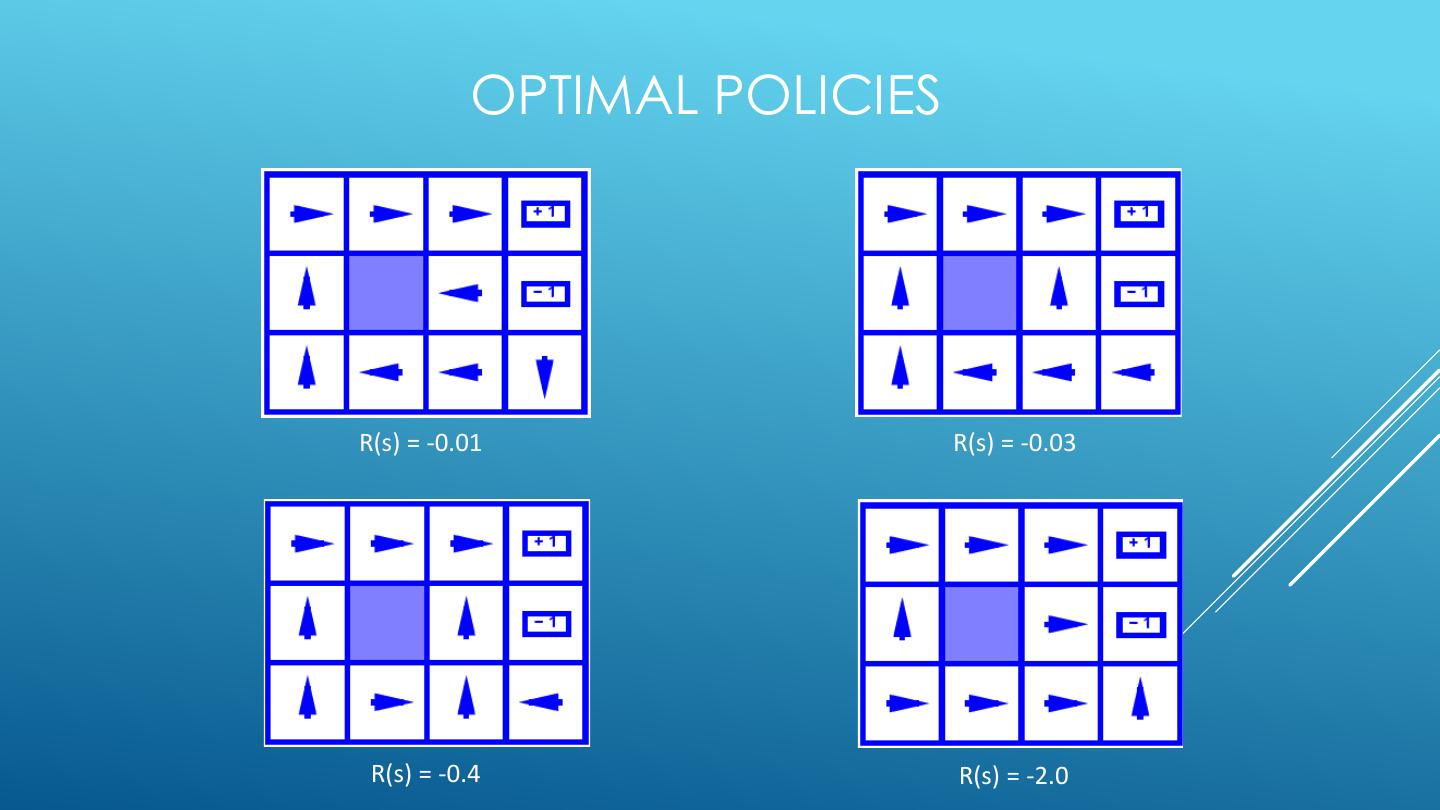
13 . OPTIMAL POLICIES R(s) = -0.01 R(s) = -0.03 R(s) = -0.4 R(s) = -2.0
14 .MDP QUANTITIES AND THE BELLMAN EQUATIONS
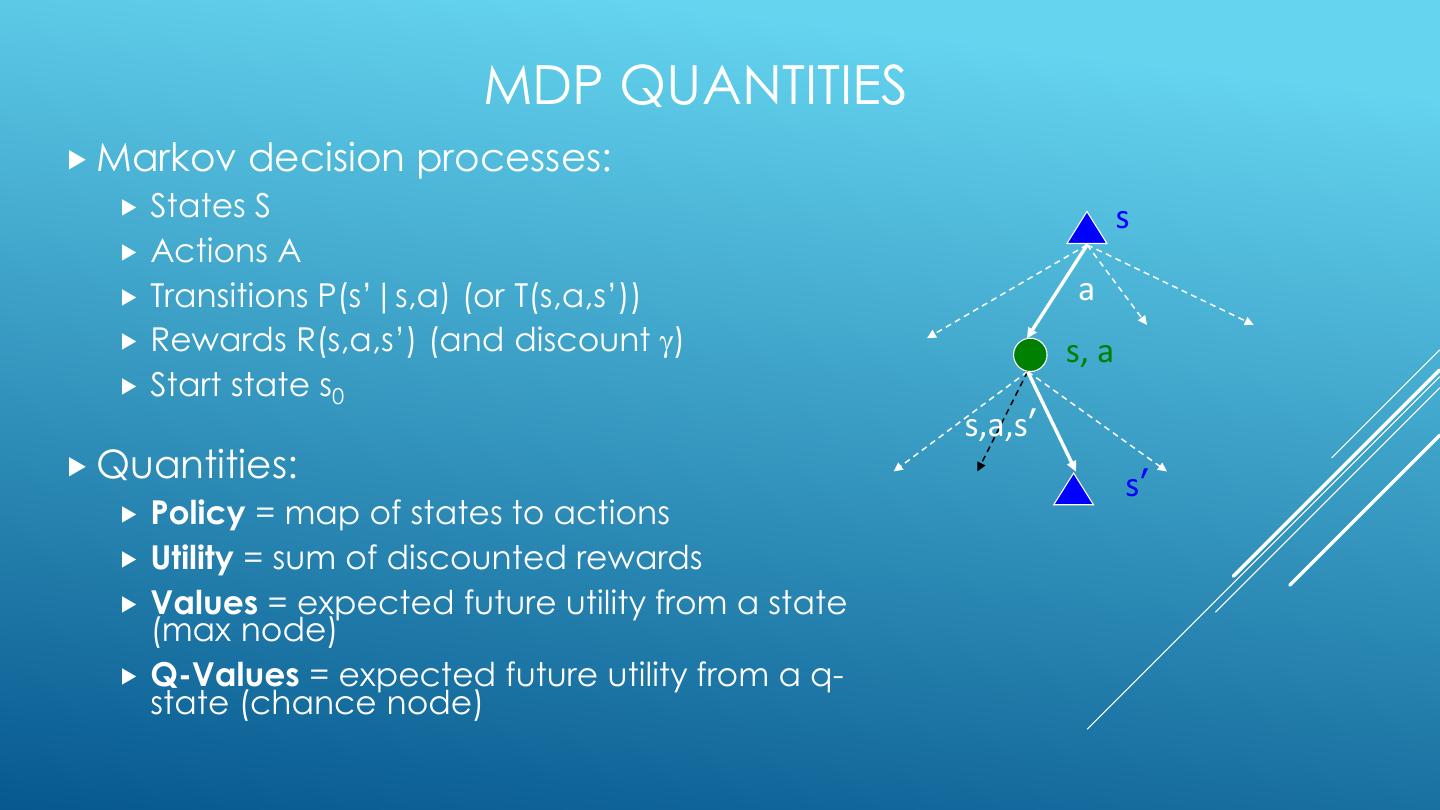
15 . MDP QUANTITIES Markov decision processes: States S s Actions A Transitions P(s’|s,a) (or T(s,a,s’)) a Rewards R(s,a,s’) (and discount ) s, a Start state s0 s,a,s’ Quantities: s’ Policy = map of states to actions Utility = sum of discounted rewards Values = expected future utility from a state (max node) Q-Values = expected future utility from a q- state (chance node)
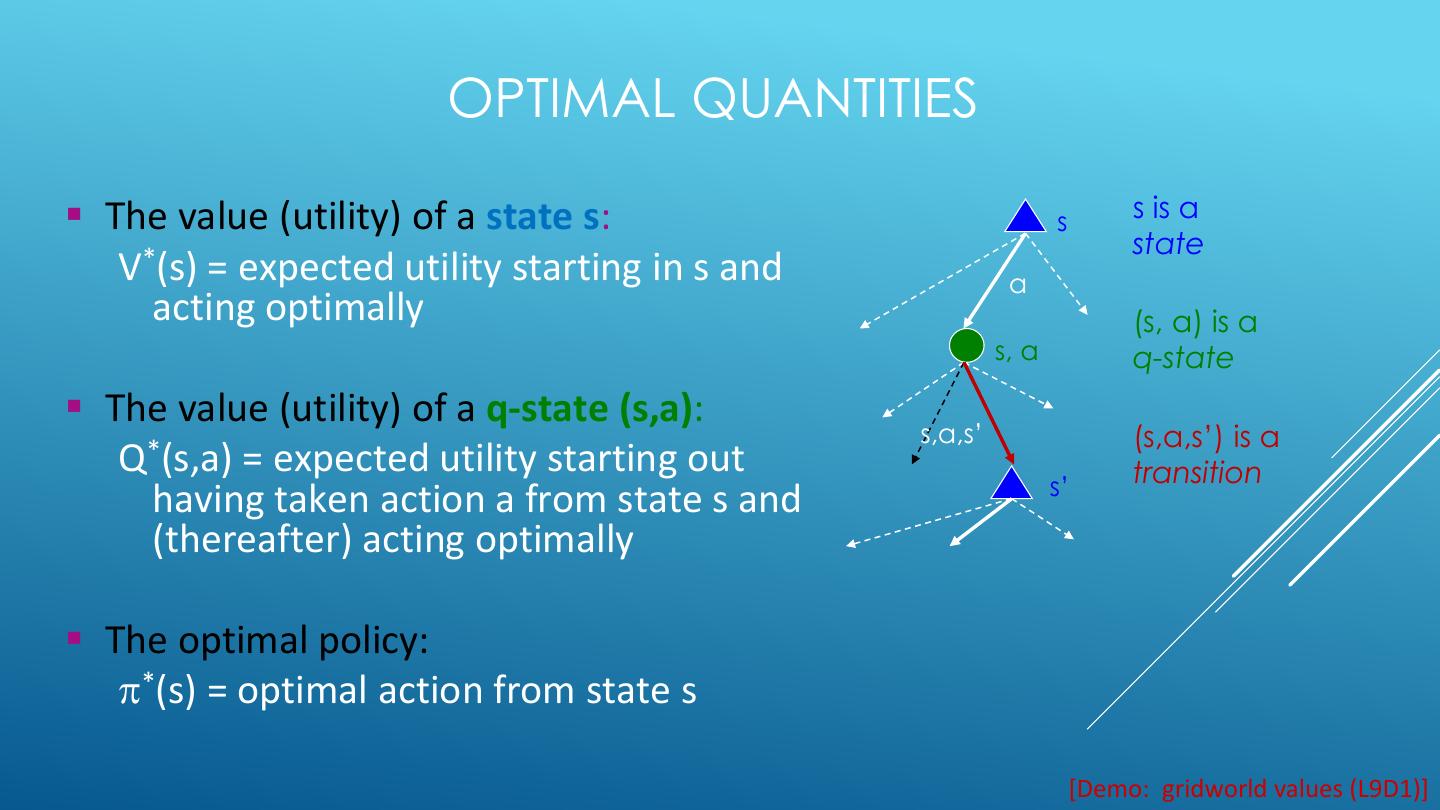
16 . OPTIMAL QUANTITIES ▪ The value (utility) of a state s: s s is a state V*(s) = expected utility starting in s and a acting optimally (s, a) is a s, a q-state ▪ The value (utility) of a q-state (s,a): s,a,s’ (s,a,s’) is a Q*(s,a) = expected utility starting out transition s’ having taken action a from state s and (thereafter) acting optimally ▪ The optimal policy: *(s) = optimal action from state s [Demo: gridworld values (L9D1)]
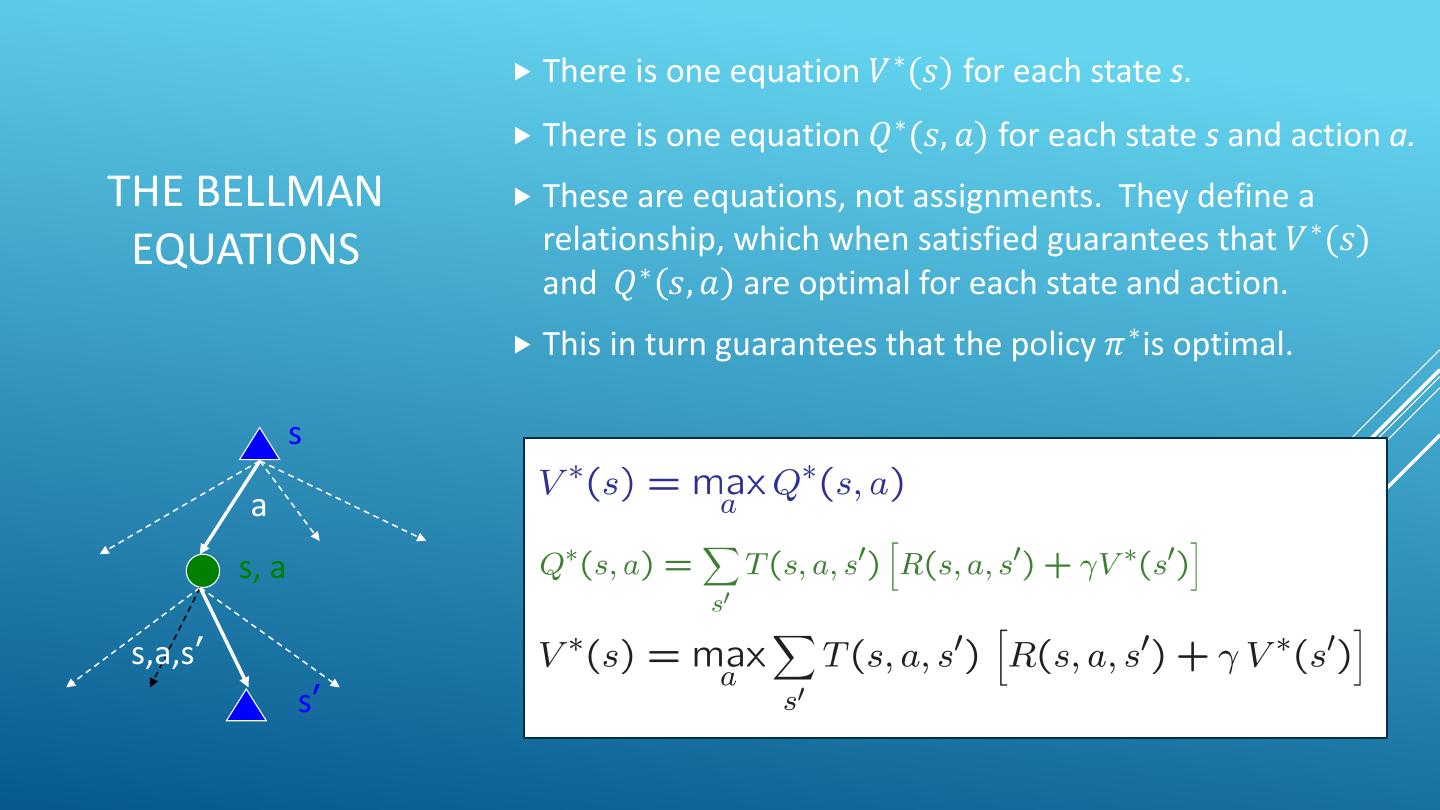
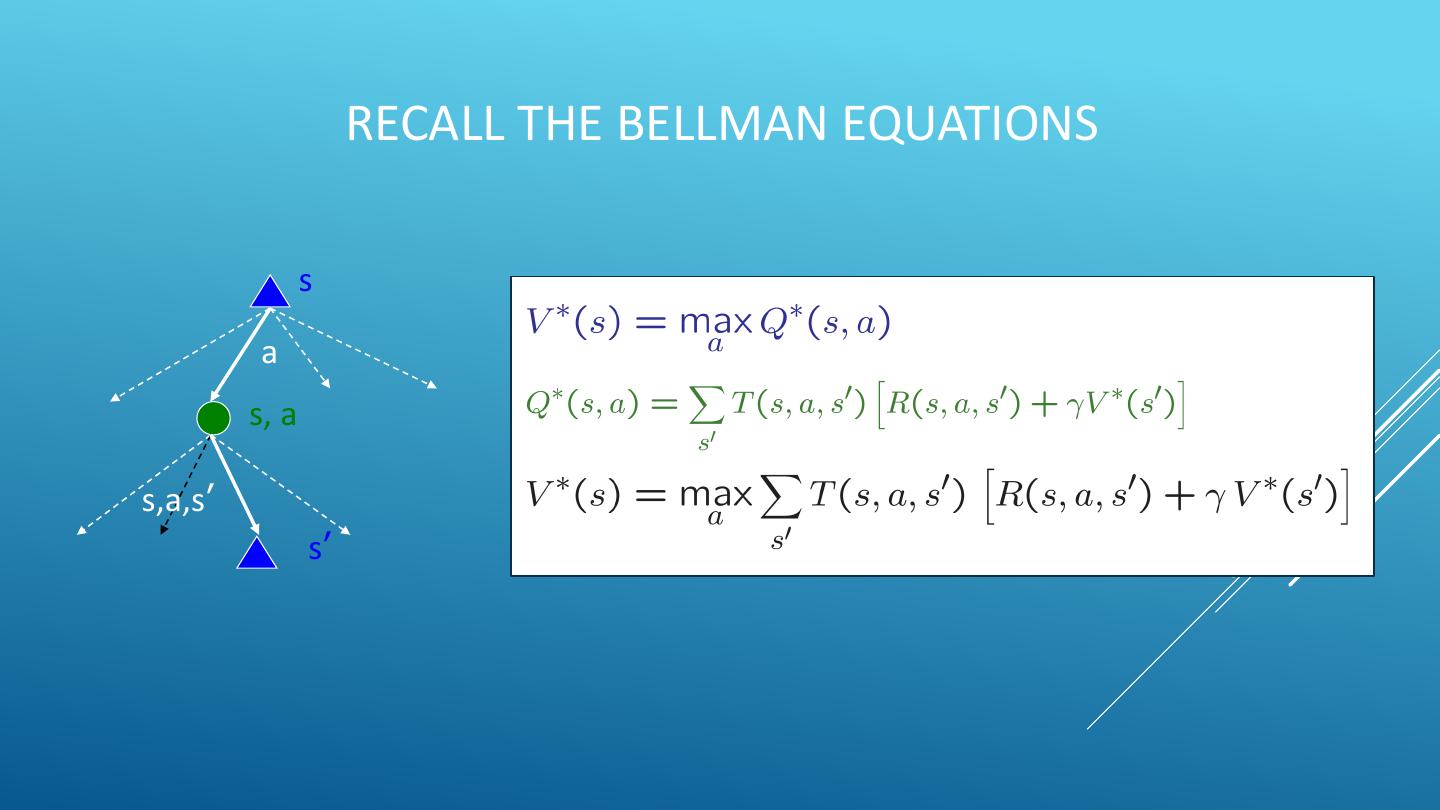
17 . There is one equation 𝑉 ∗ (𝑠) for each state s. There is one equation 𝑄 ∗ (𝑠, 𝑎) for each state s and action a. THE BELLMAN These are equations, not assignments. They define a EQUATIONS relationship, which when satisfied guarantees that 𝑉 ∗ (𝑠) and 𝑄 ∗ 𝑠, 𝑎 are optimal for each state and action. This in turn guarantees that the policy 𝜋 ∗ is optimal. s a s, a s,a,s’ s’
18 .4 MDP ALGORITHMS
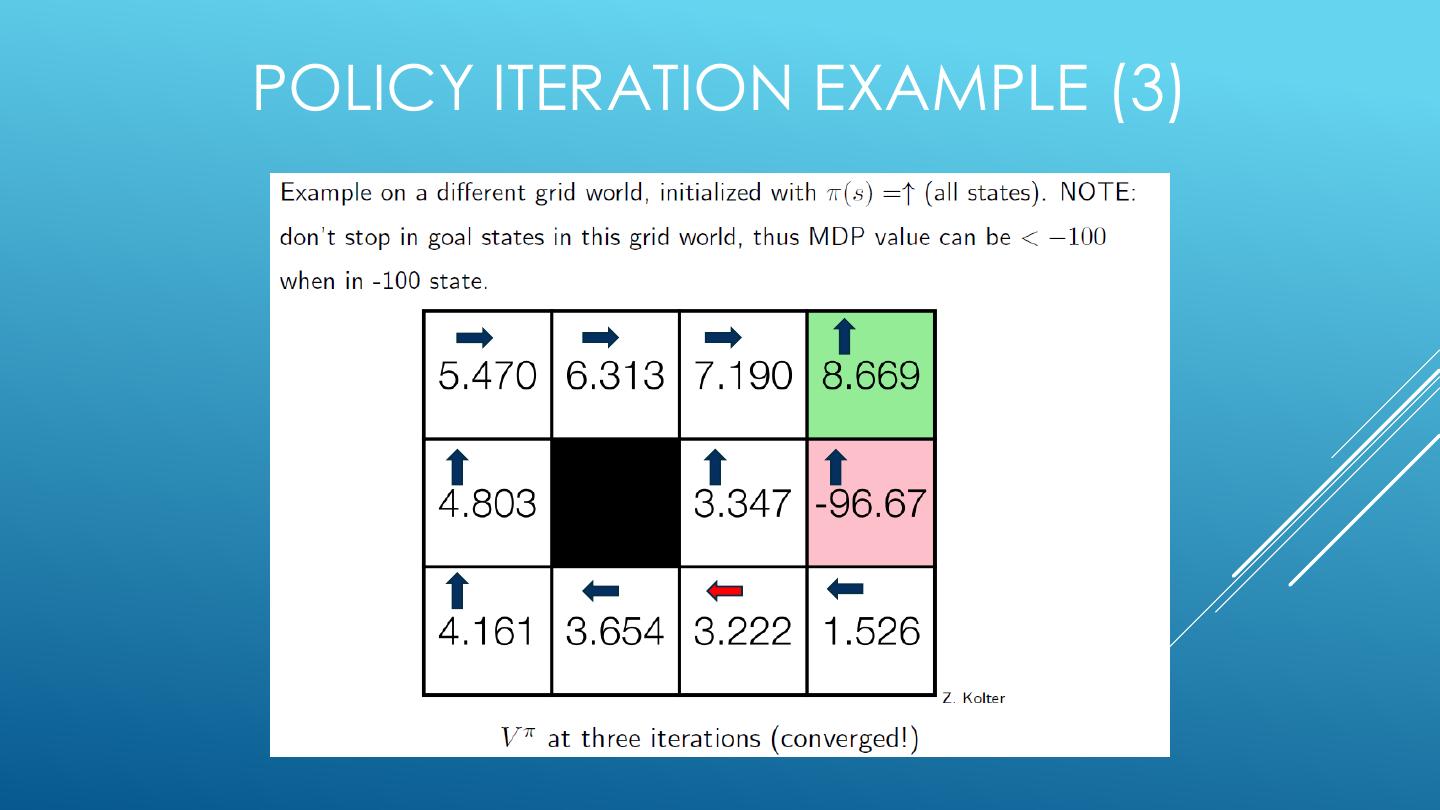
19 . 4 MDP ALGORITHMS • Expectimax (recursive, finite horizon) • Value Iteration (dynamic programming, finite horizon) • Value Iteration (dynamic programming, infinite horizon) • Policy Iteration (dynamic programming, infinite horizon, optimize policy)
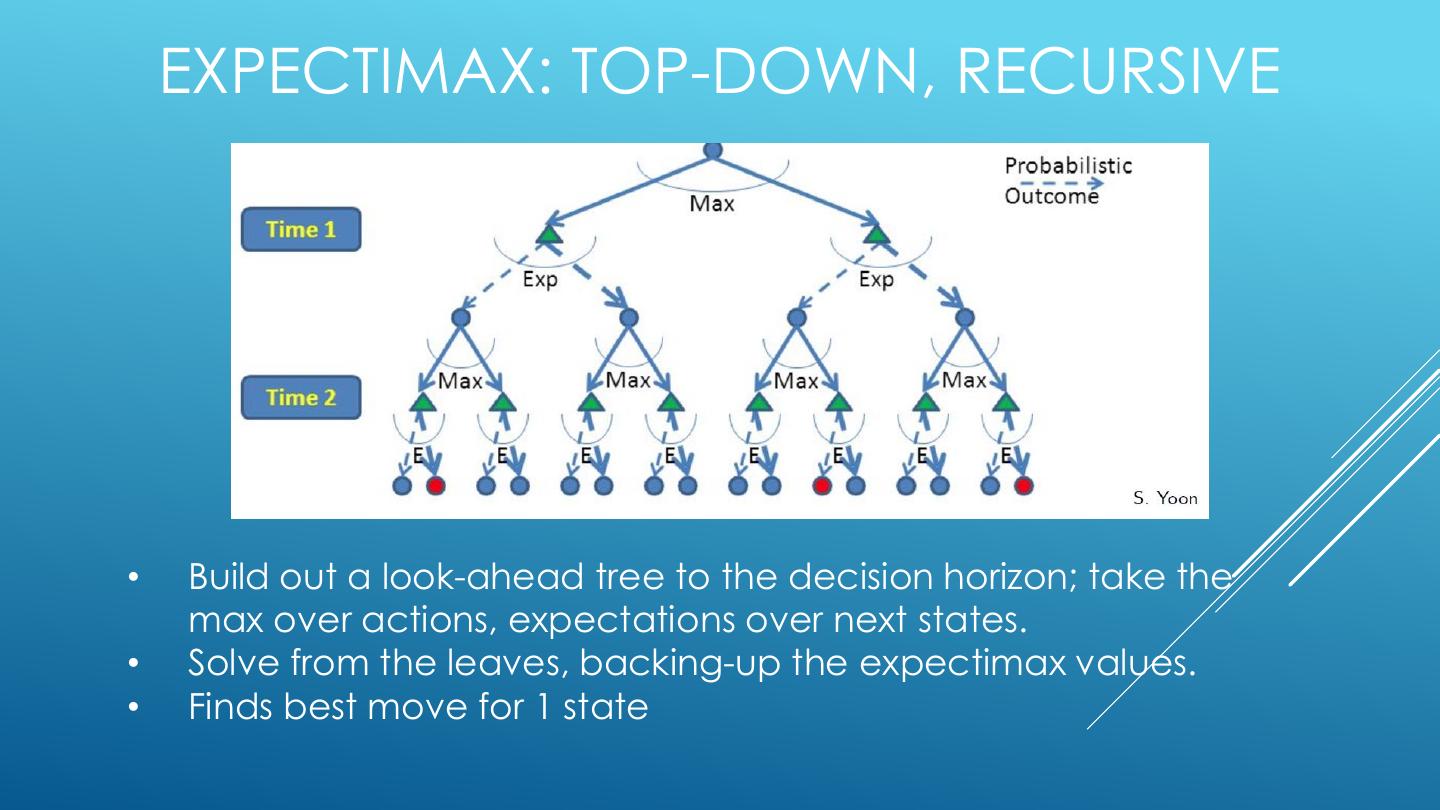
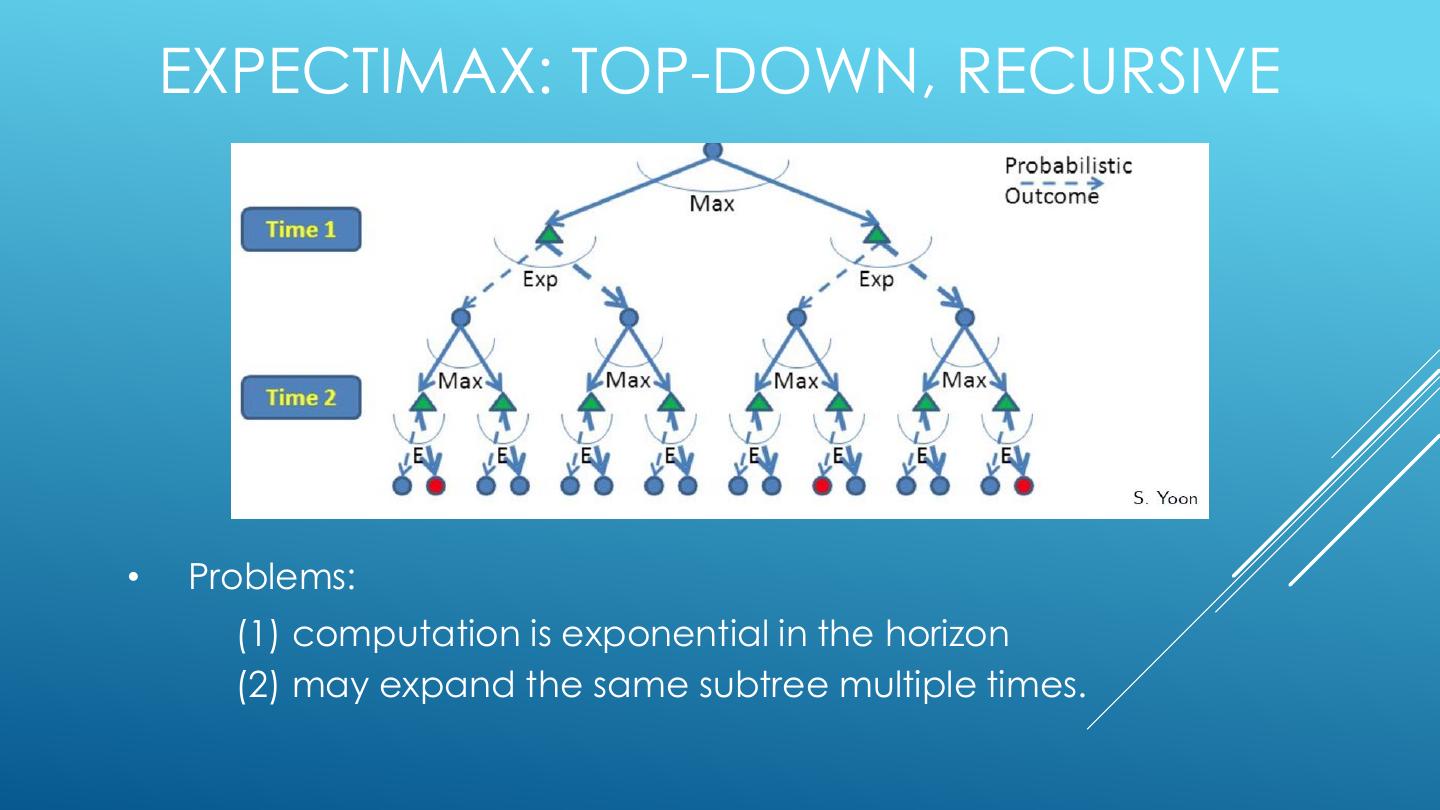
20 . EXPECTIMAX: TOP-DOWN, RECURSIVE • Build out a look-ahead tree to the decision horizon; take the max over actions, expectations over next states. • Solve from the leaves, backing-up the expectimax values. • Finds best move for 1 state
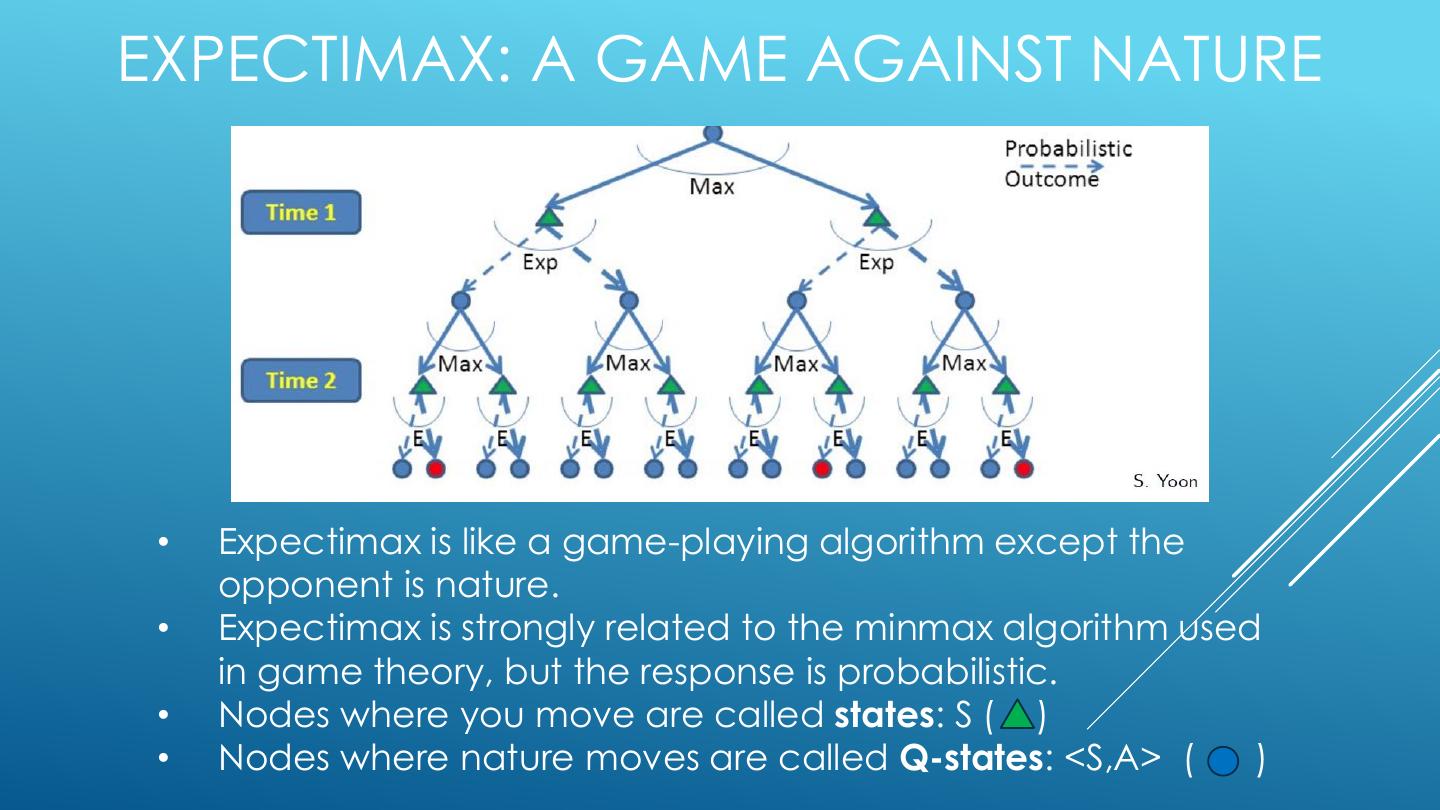
21 .EXPECTIMAX: A GAME AGAINST NATURE • Expectimax is like a game-playing algorithm except the opponent is nature. • Expectimax is strongly related to the minmax algorithm used in game theory, but the response is probabilistic. • Nodes where you move are called states: S ( ) • Nodes where nature moves are called Q-states: <S,A> ( )
22 . EXPECTIMAX: TOP-DOWN, RECURSIVE • Problems: (1) computation is exponential in the horizon (2) may expand the same subtree multiple times.
23 .VALUE ITERATION USES DYNAMIC PROGRAMMING
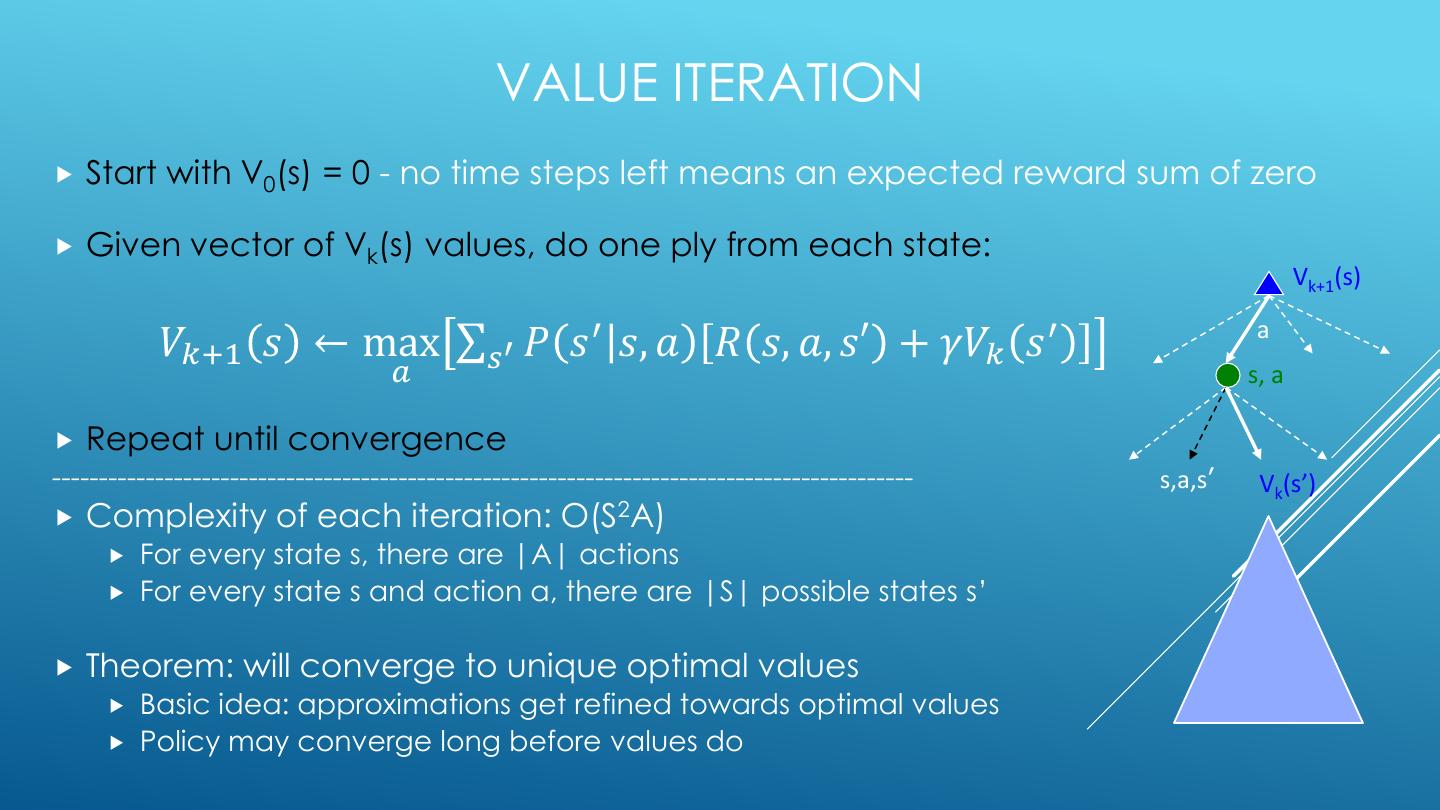
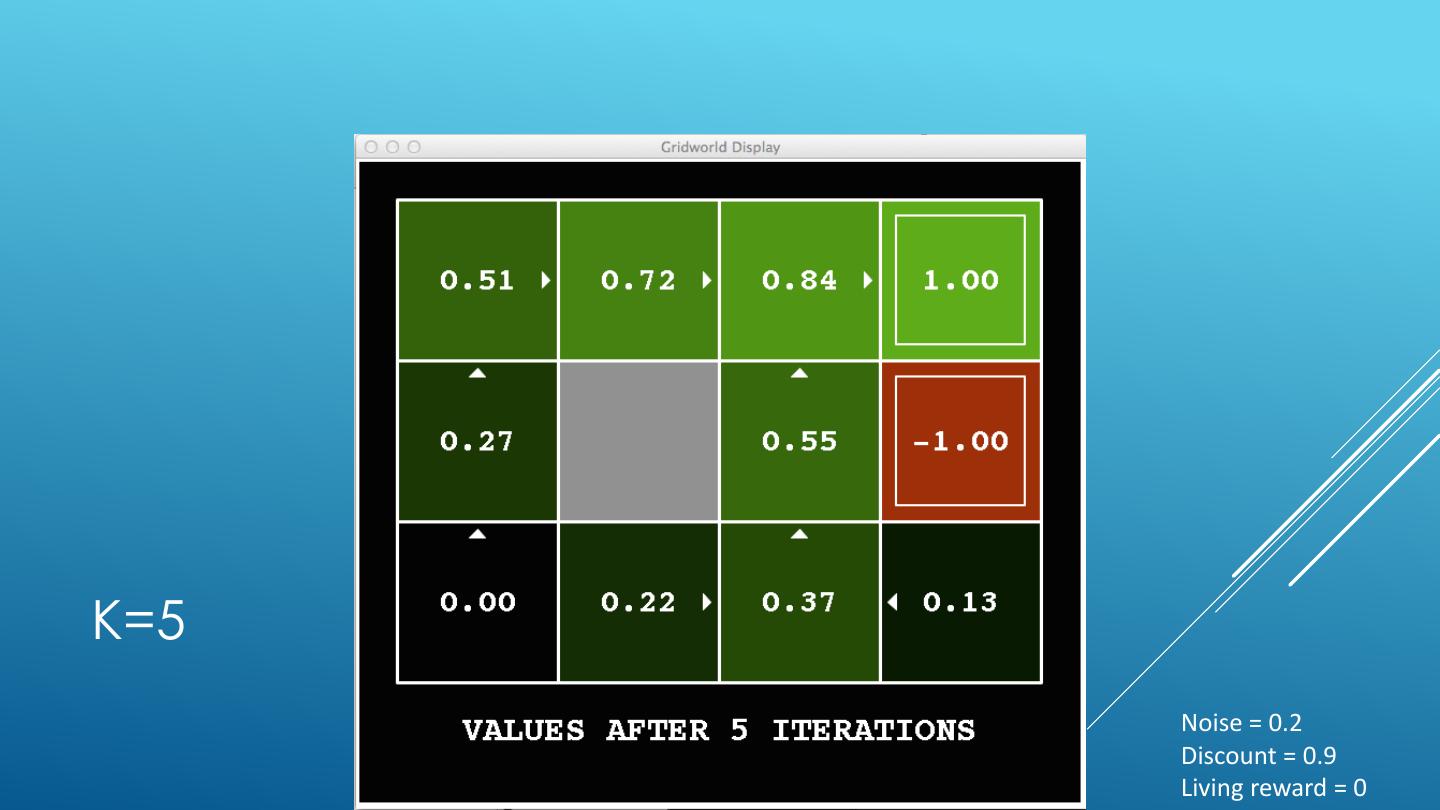
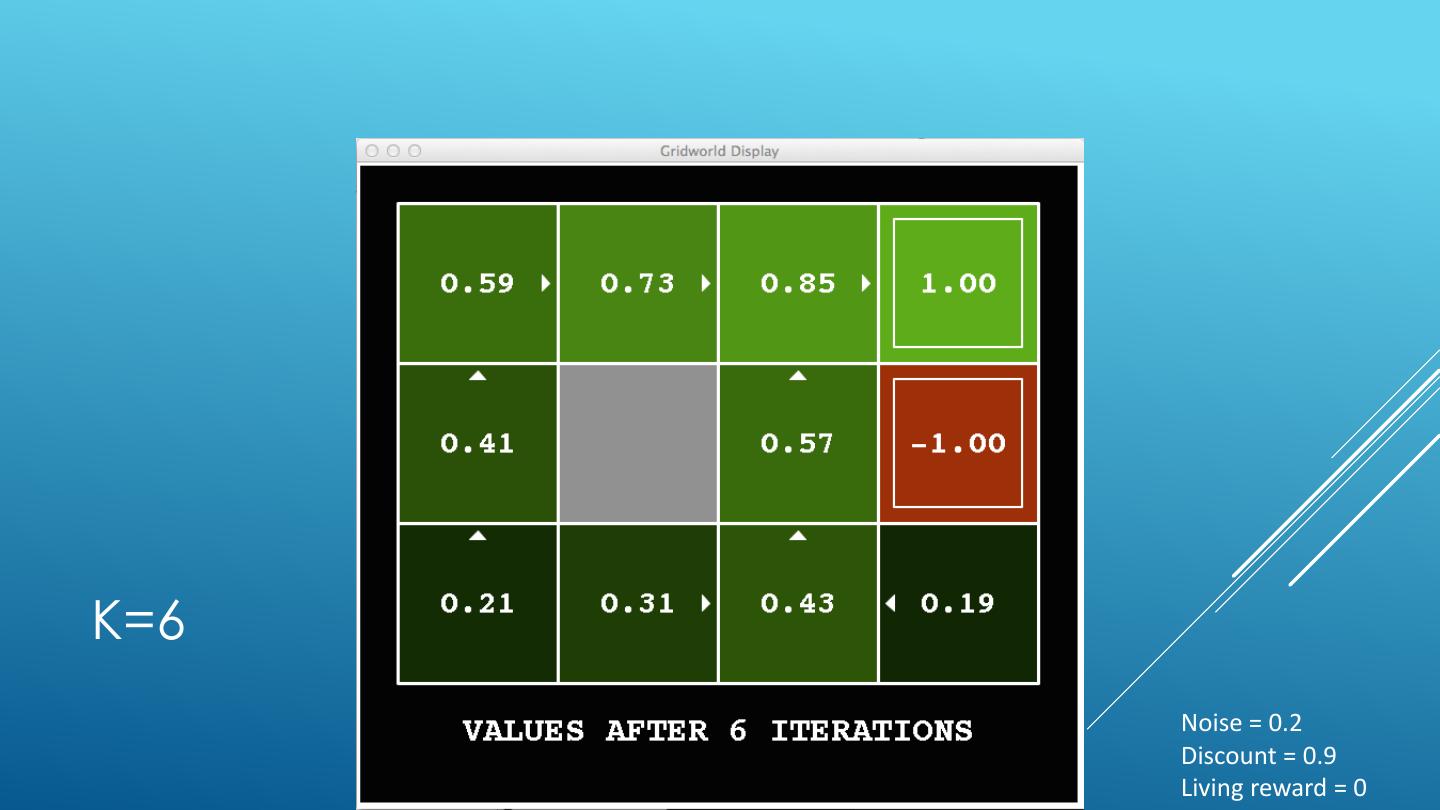
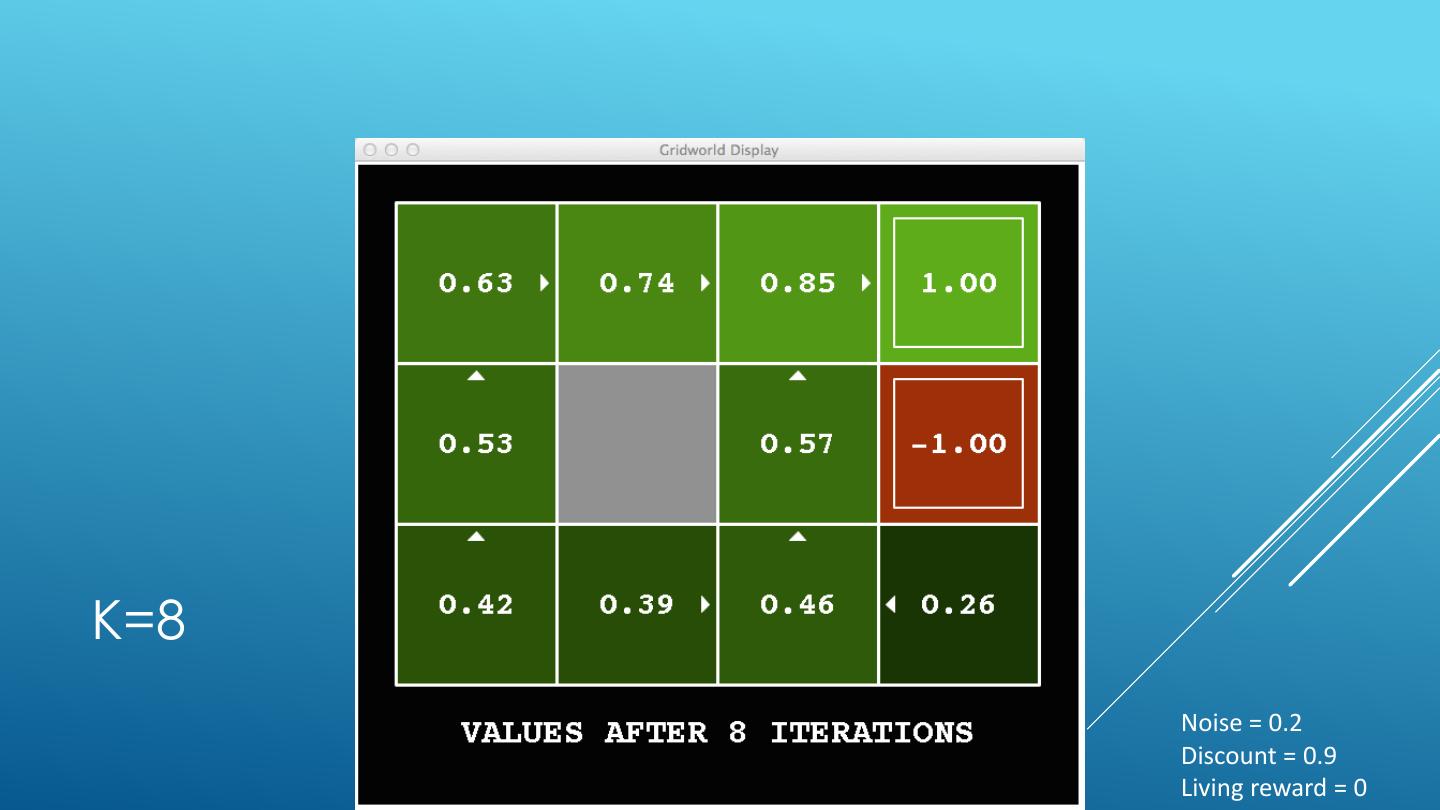
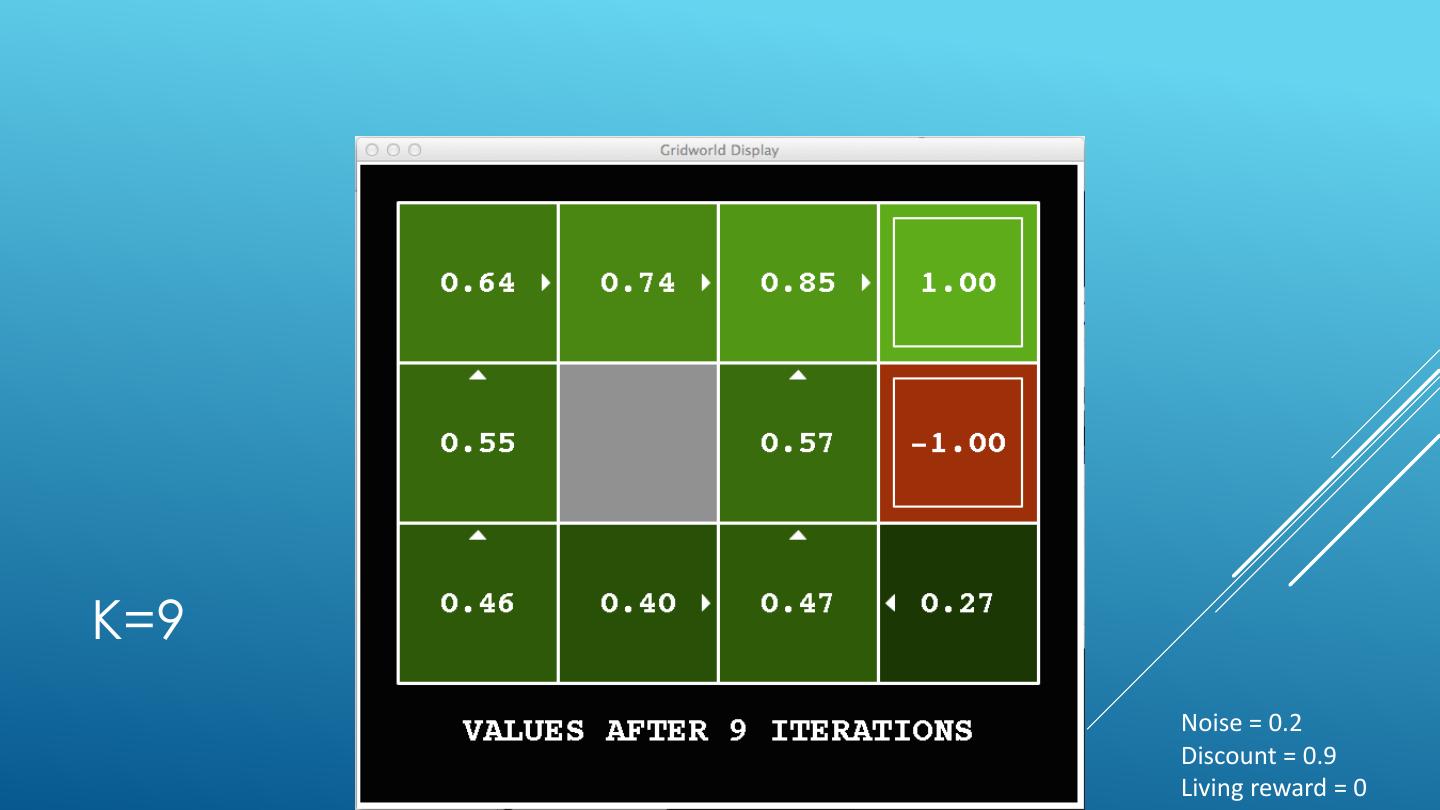
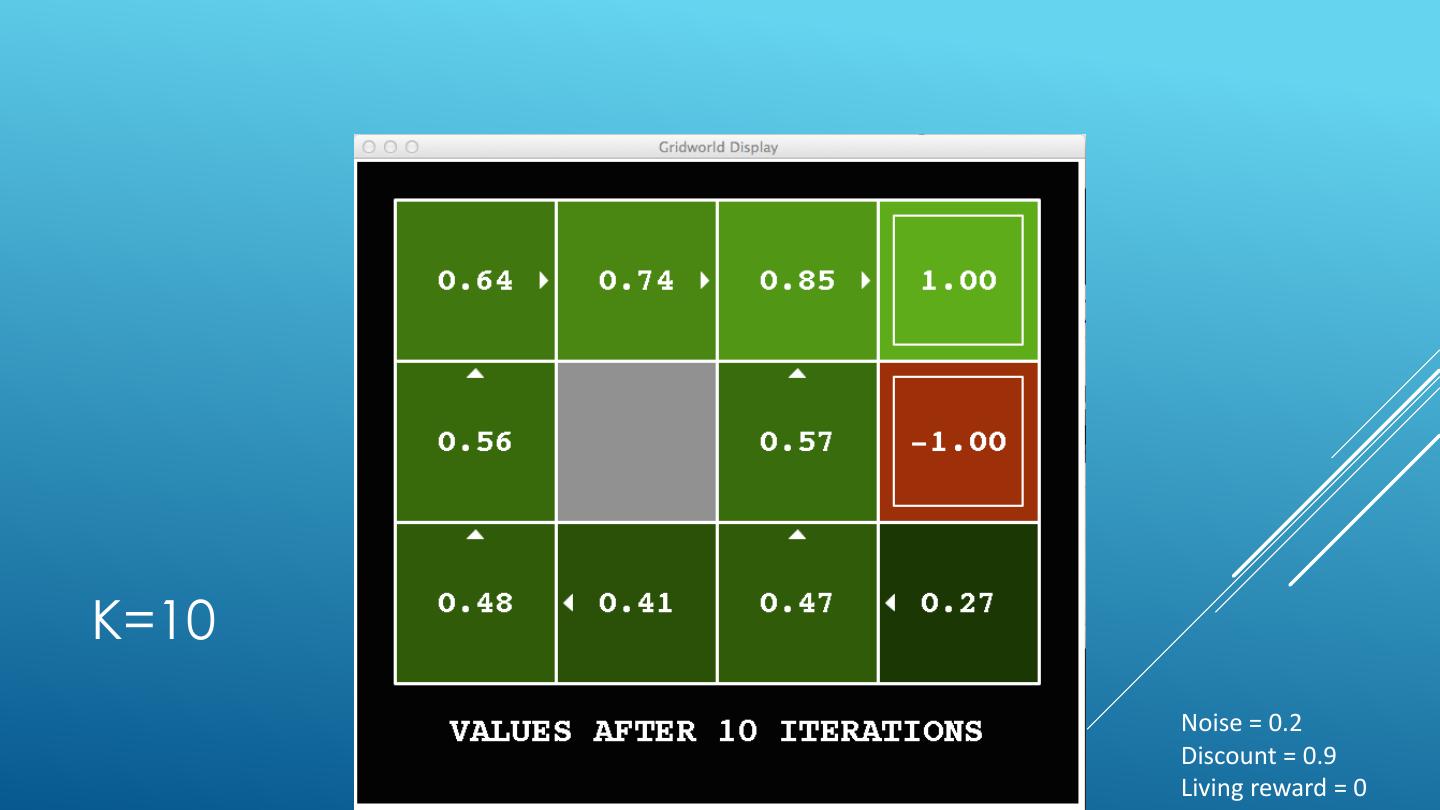
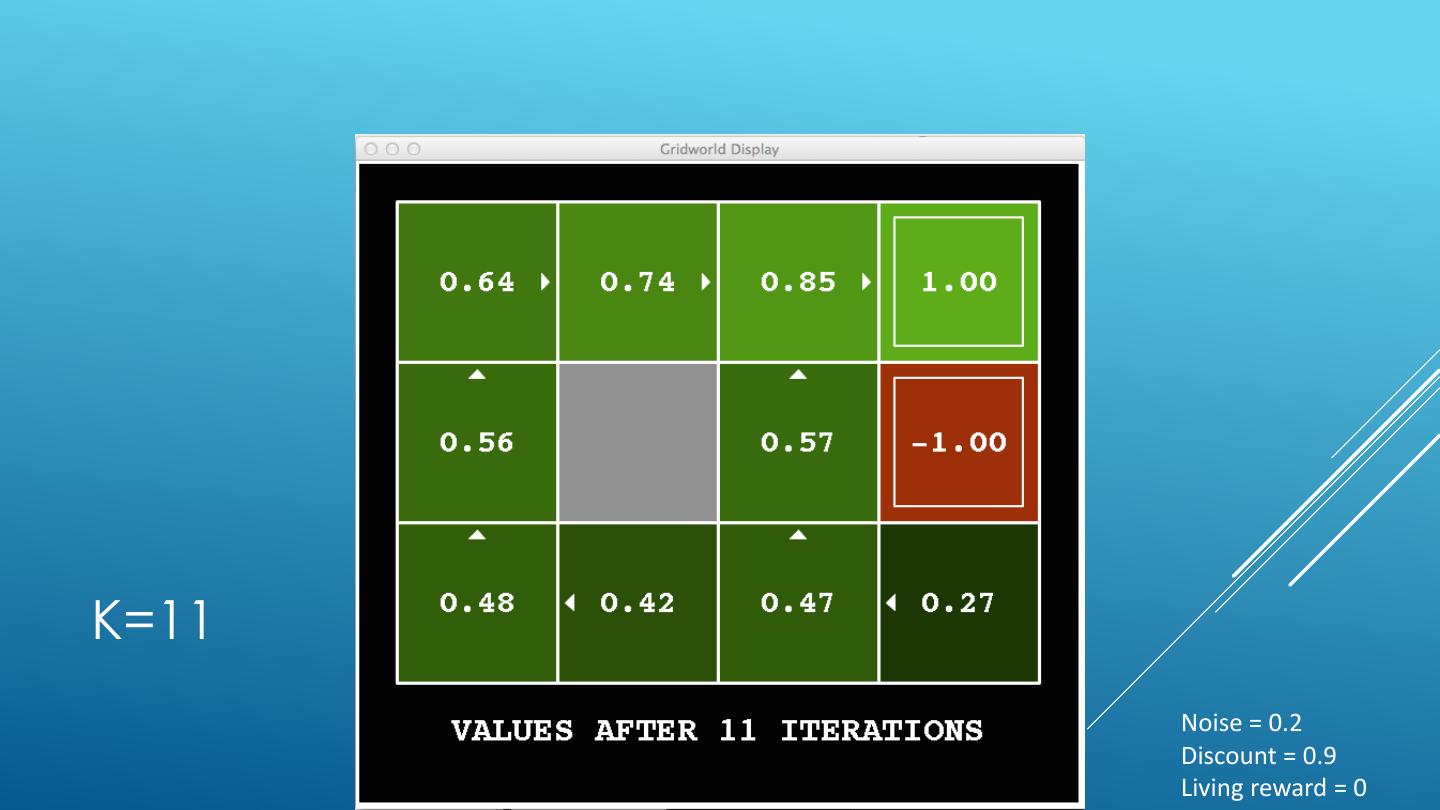
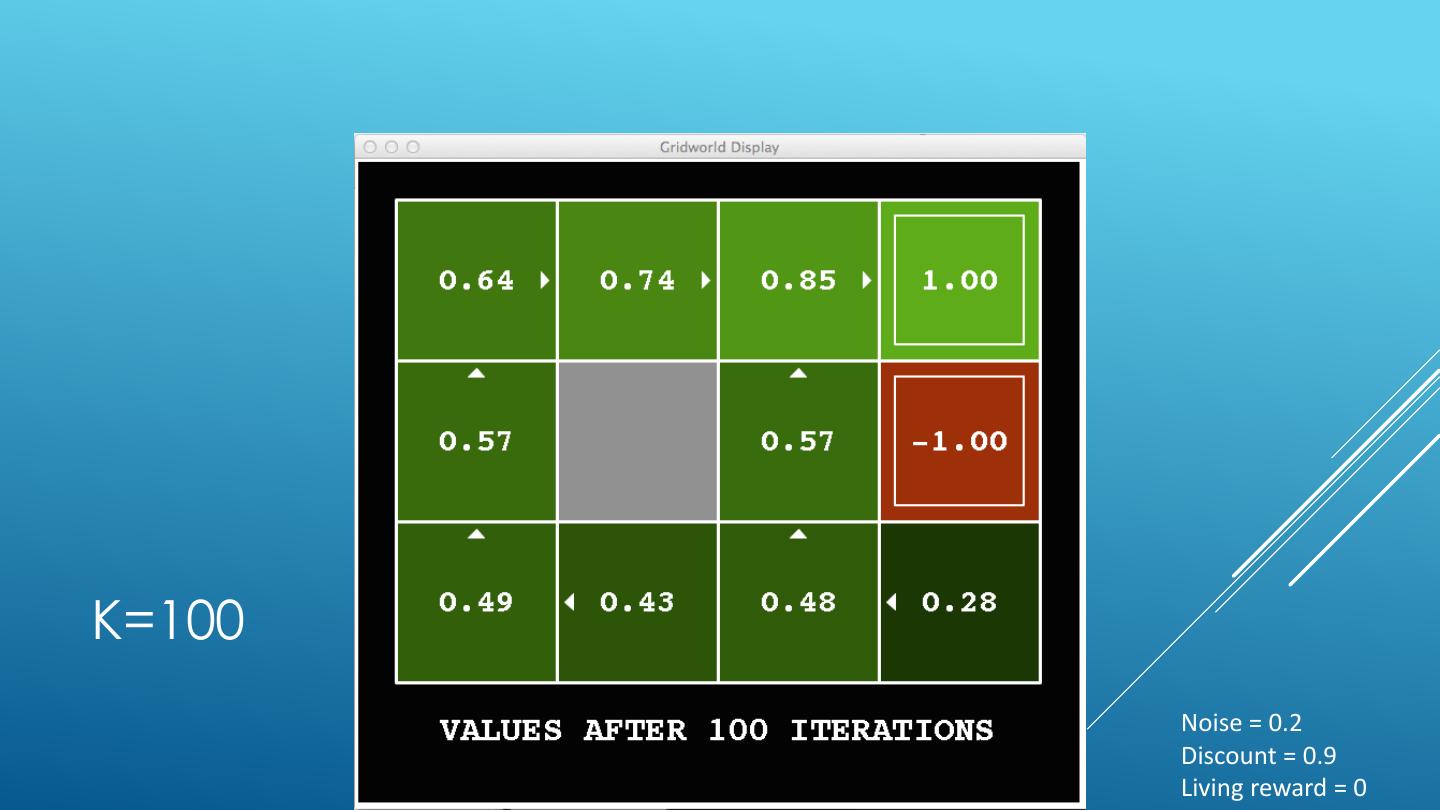
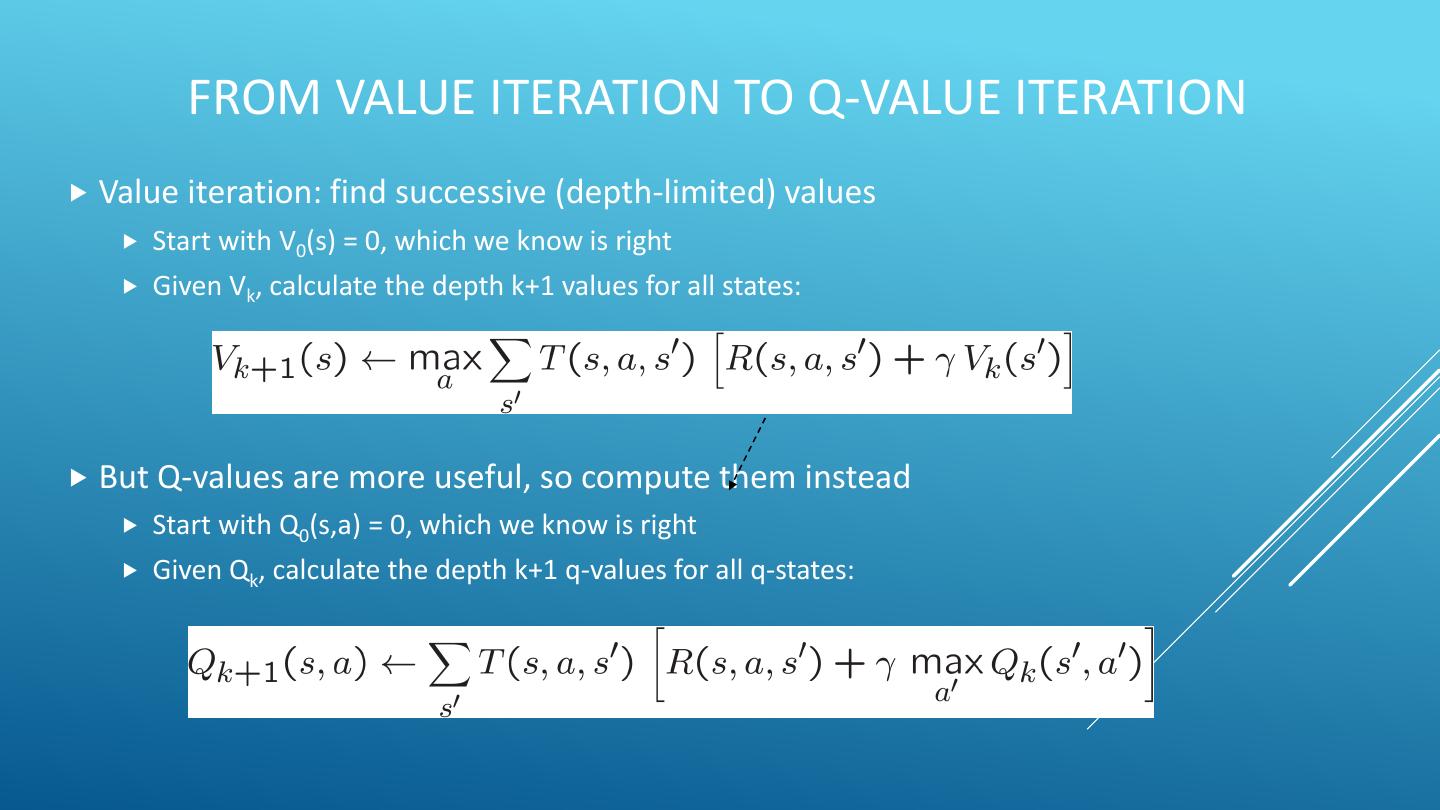
24 . VALUE ITERATION Start with V0(s) = 0 - no time steps left means an expected reward sum of zero Given vector of Vk(s) values, do one ply from each state: Vk+1(s) 𝑉𝑘+1 𝑠 ← max σ𝑠′ 𝑃 𝑠 ′ 𝑠, 𝑎 𝑅 𝑠, 𝑎, 𝑠′ + 𝛾𝑉𝑘 𝑠 ′ a 𝑎 s, a Repeat until convergence -------------------------------------------------------------------------------------------- s,a,s’ Vk(s’) Complexity of each iteration: O(S2A) For every state s, there are |A| actions For every state s and action a, there are |S| possible states s’ Theorem: will converge to unique optimal values Basic idea: approximations get refined towards optimal values Policy may converge long before values do
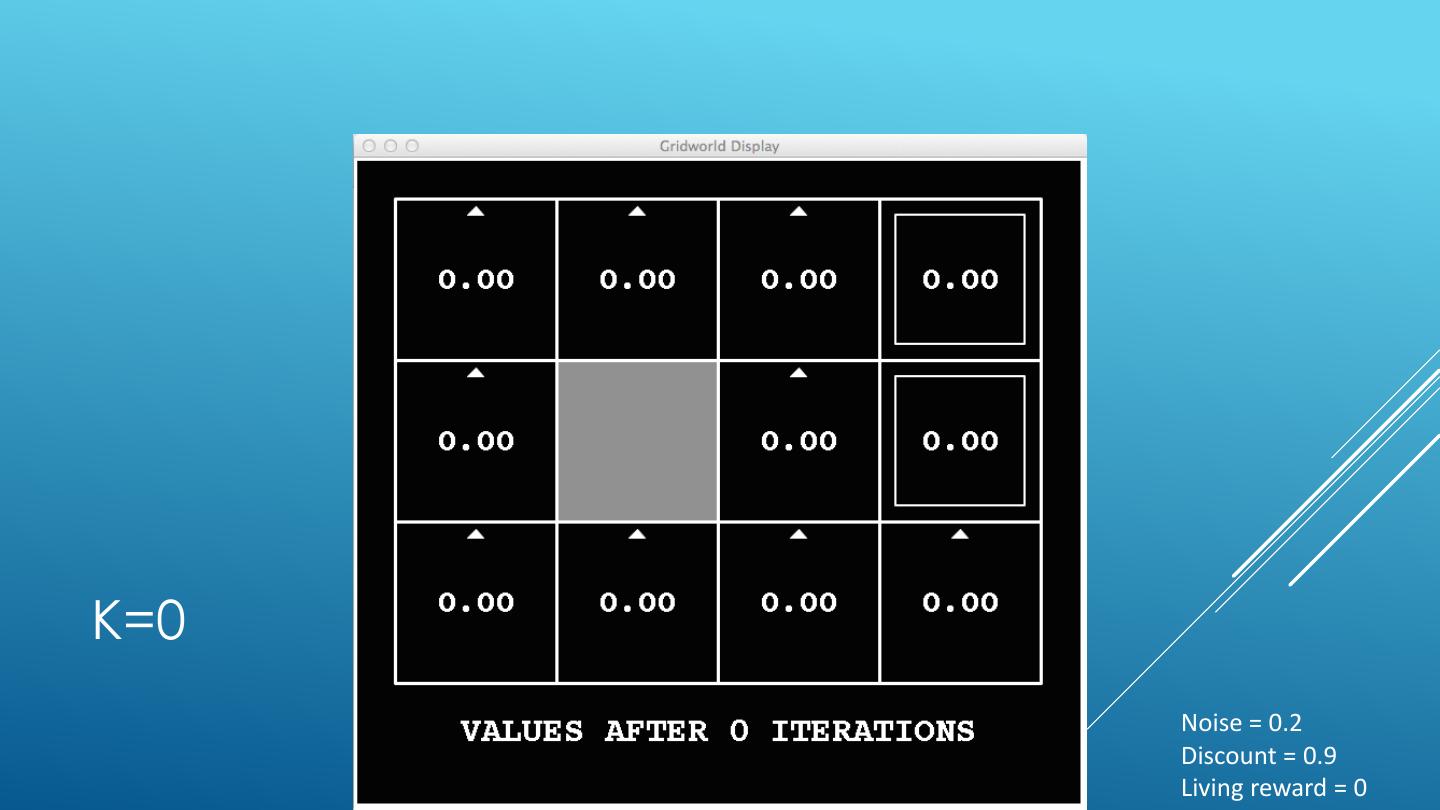
25 .K=0 Noise = 0.2 Discount = 0.9 Living reward = 0
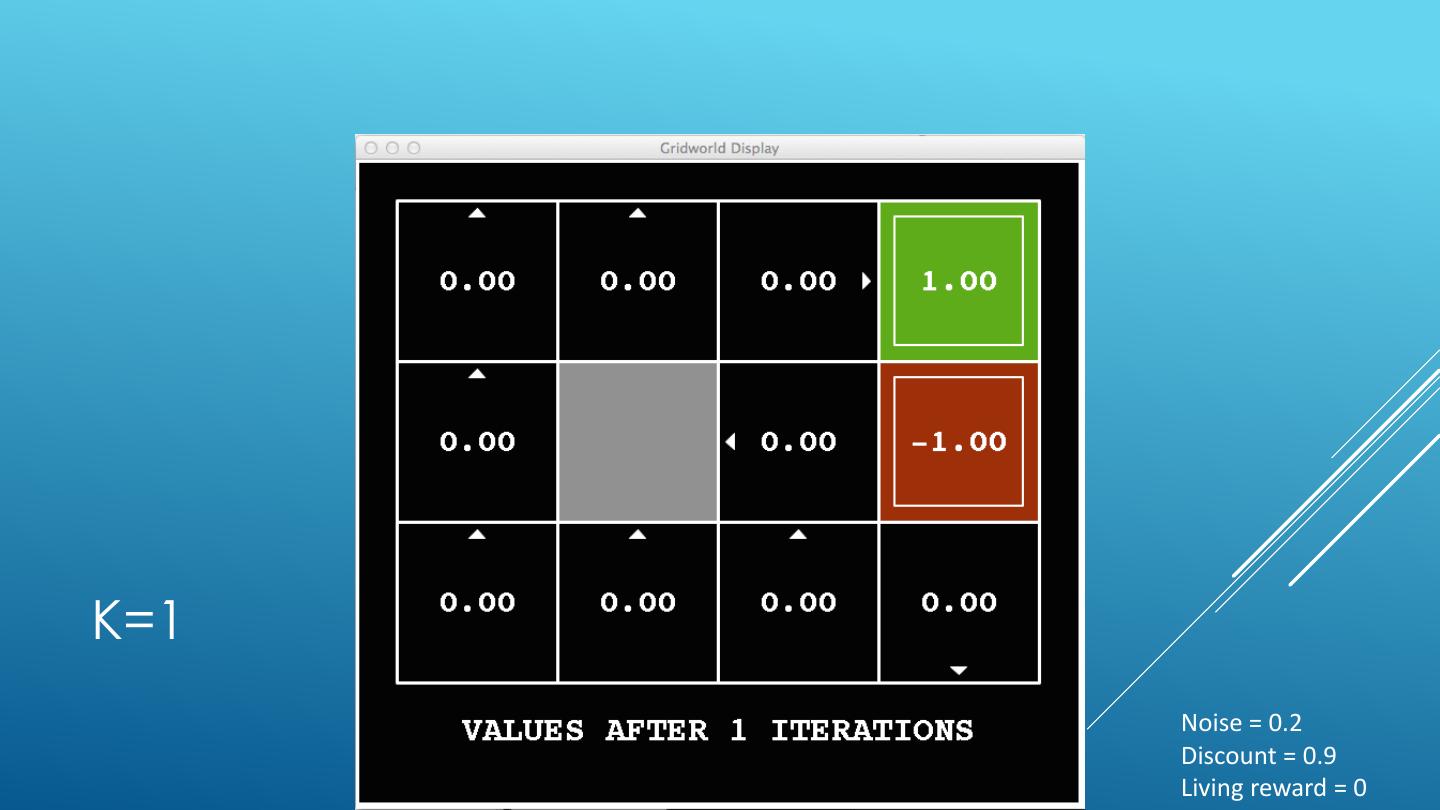
26 .K=1 Noise = 0.2 Discount = 0.9 Living reward = 0
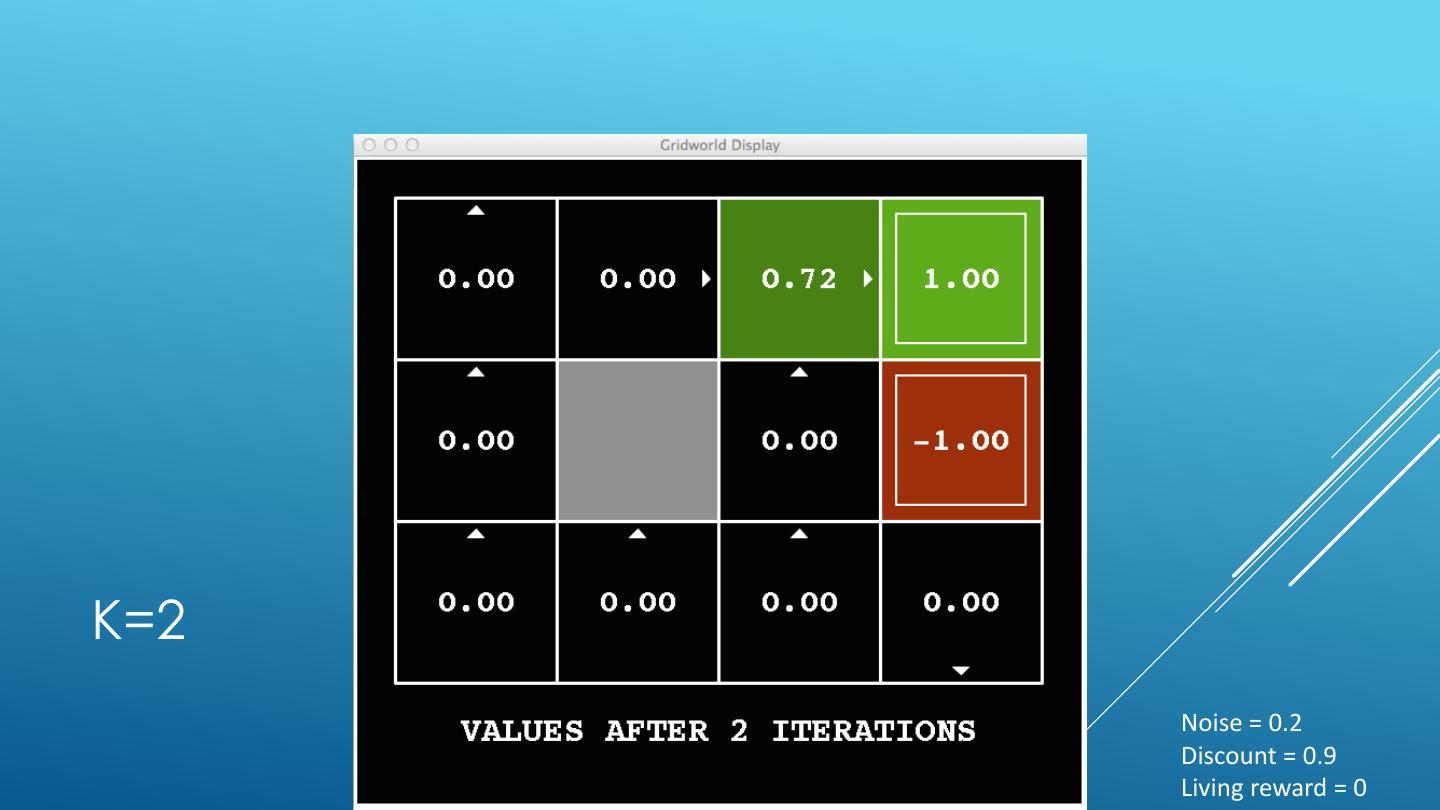
27 .K=2 Noise = 0.2 Discount = 0.9 Living reward = 0
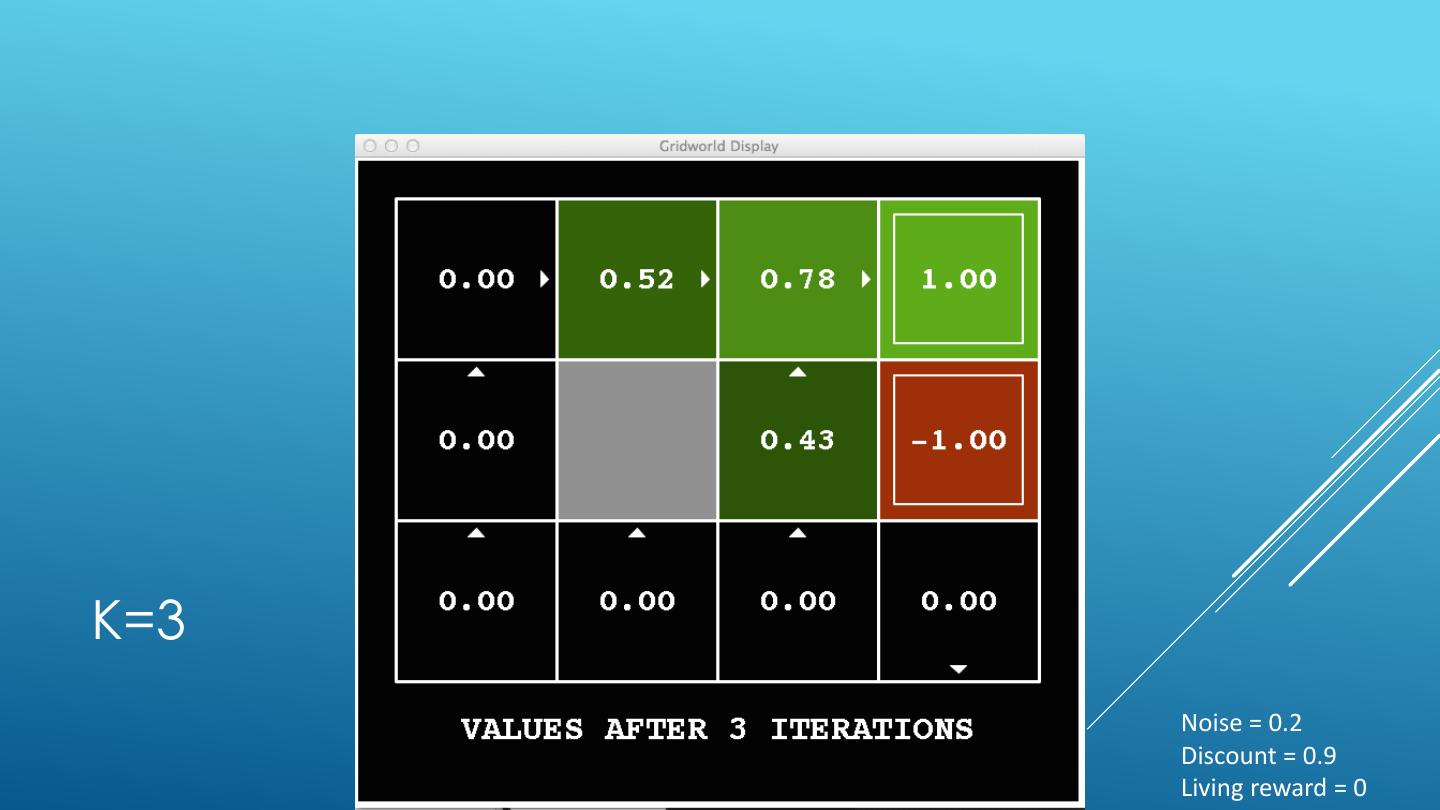
28 .K=3 Noise = 0.2 Discount = 0.9 Living reward = 0
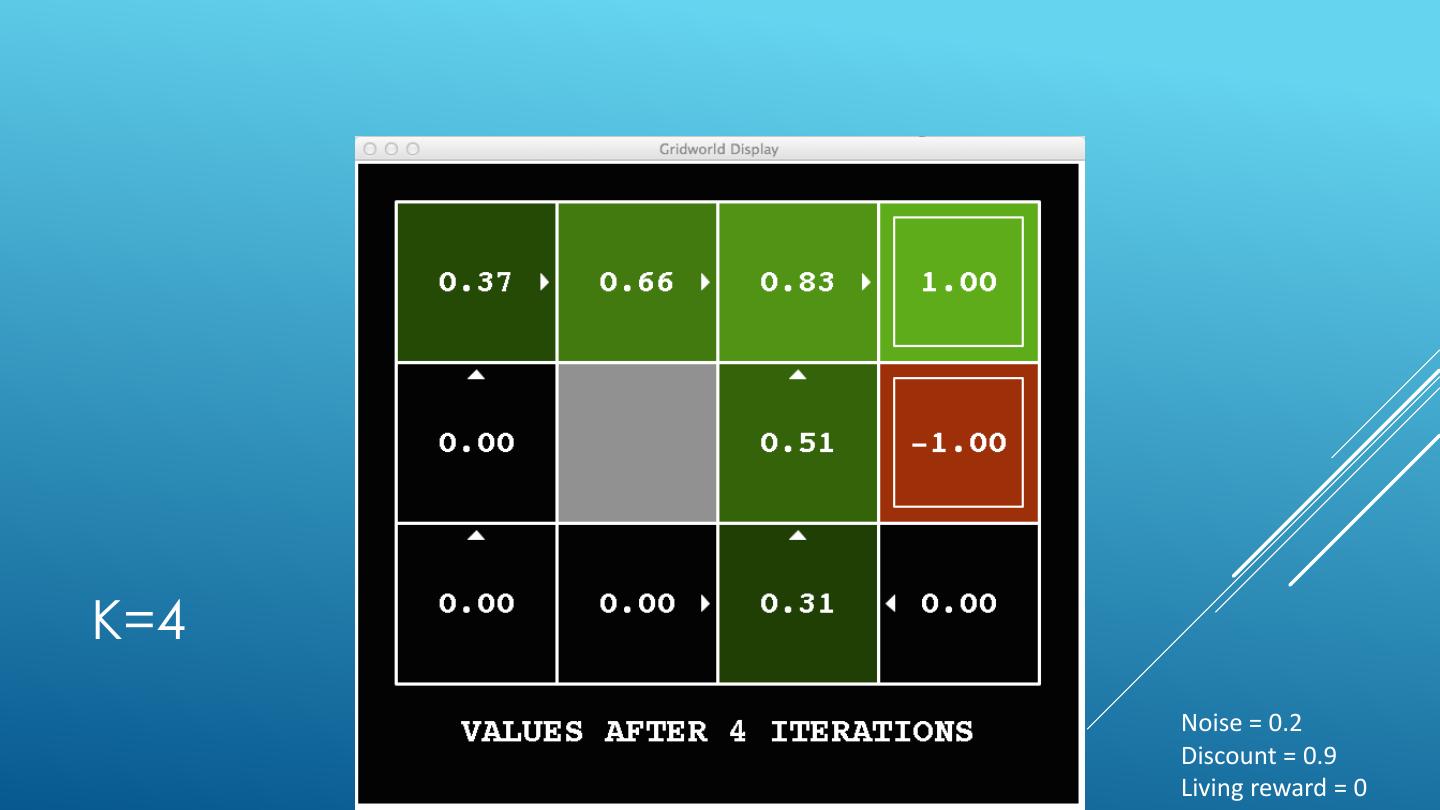
29 .K=4 Noise = 0.2 Discount = 0.9 Living reward = 0
3秒后跳转登录页面
去登陆

