















- 快召唤伙伴们来围观吧
- 微博 QQ QQ空间 贴吧
- 文档嵌入链接
- 复制
- 微信扫一扫分享
- 已成功复制到剪贴板
6-OS-Synchronization
Shared Memory Thread Synchronization
Threads cooperate in multithreaded environments
-User threads and kernel threads
-Share resources and data structures
--E.g. memory cache in a web server
-Coordinate execution
--Producer/consumer model
For correctness, cooperation must be controlled
-Must assume threads interleave execution arbitrarily
--Scheduler cannot know everything
-Control mechanism: synchronization
--Allows restriction of interleaving
Note: This is a global issue (kernel and user)
-Also in distributed systems
展开查看详情
1 .Synchronization
2 .Shared Memory T hread S ynchronization Threads cooperate in multithreaded environments User threads and kernel threads Share resources and data structures E.g. memory cache in a web server Coordinate execution Producer/consumer model For correctness, cooperation must be controlled Must assume threads interleave execution arbitrarily Scheduler cannot know everything Control mechanism: synchronization Allows restriction of interleaving Note: This is a global issue (kernel and user) Also in distributed systems
3 .Shared Resources Our focus: Coordinating access to shared resource Basic Problem: Two concurrent threads access a shared variable Access methods: Read-Modify-Write Two levels of approach: Mechanisms for control Low level locks Higher level mutexes , semaphores, monitors, condition variables Patterns for coordinating access Bounded buffer, producer/consumer, …
4 .The Classic Example Managing a bank account: Suppose account is shared between 2 people What happens if both people go to ATMS and deposit $$? i nt balance; void deposit( int amount) { balance += amount; } i nt withdraw( int amount){ balance -= amount; return balance; }
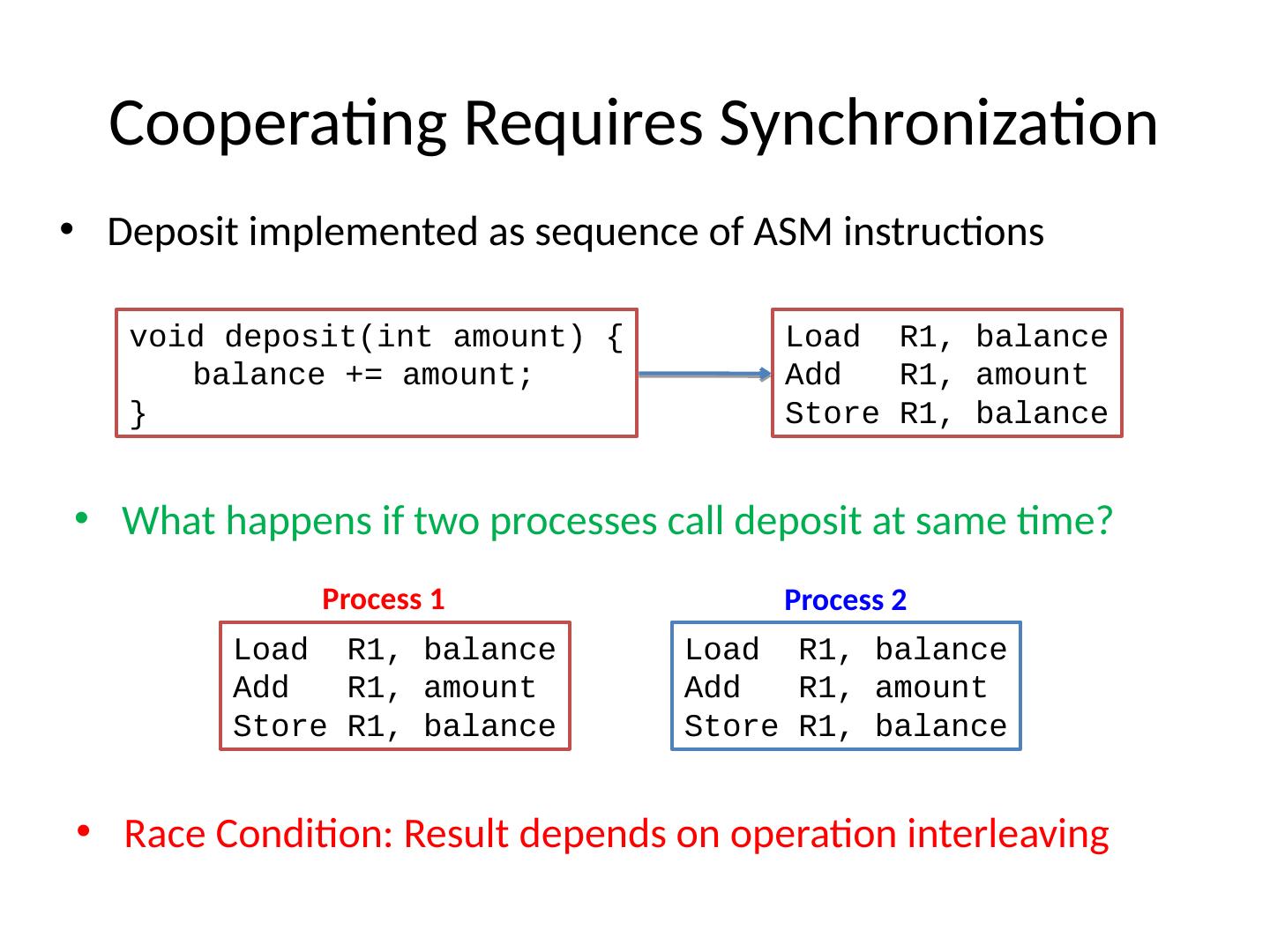
5 .Cooperating R equires Synchronization v oid deposit( int amount) { balance += amount; } Deposit implemented as sequence of ASM instructions L oad R1, balance Add R1, amount Store R1, balance What happens if two processes call deposit at same time? L oad R1, balance Add R1, amount Store R1, balance L oad R1, balance Add R1, amount Store R1, balance Race Condition: Result depends on operation interleaving Process 1 Process 2
6 .Interleaved Schedules Execution of the two threads can be interleaved Assume uniprocessor w/ preemptive scheduling L oad R1, balance Add R1, amount L oad R1, balance Add R1, amount Store R1, balance Store R1, balance Instruction Sequence a s seen by CPU Context Switch Context Switch What’s the account balance after this sequence?
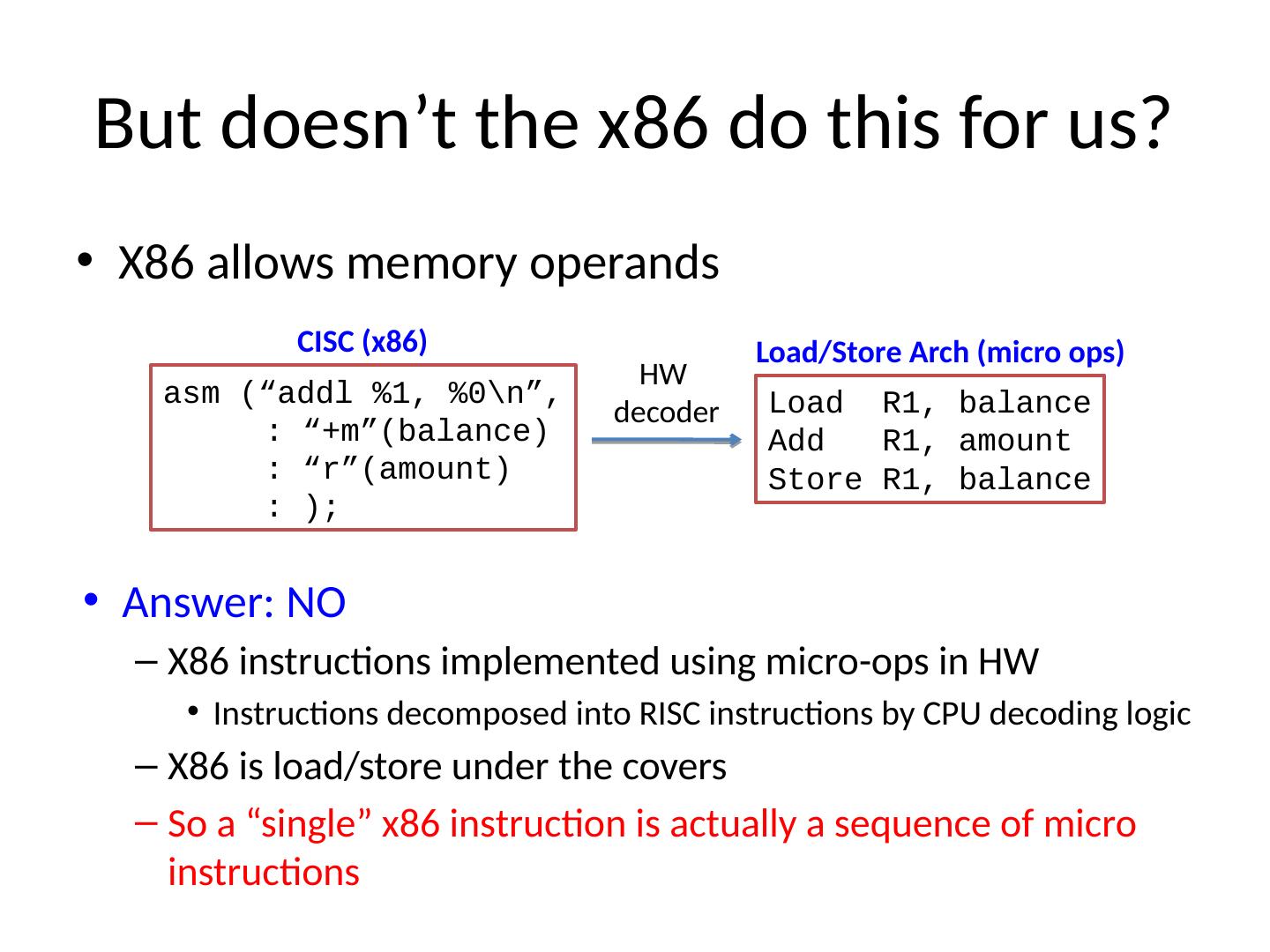
7 .But doesn’t the x86 do this for us? X86 allows memory operands L oad R1, balance Add R1, amount Store R1, balance Load/Store Arch (micro ops) a sm (“ addl %1, %0
8 .The crux of the matter Two concurrent threads access a shared resource without any synchronization Creates a Race condition Output is non-deterministic and depends on timing We need mechanisms for controlling access to shared resources Allows us to reason about program operation Re-introduces determinism Synchronization is necessary for any shared data structure
9 .When are resources shared? Local variables are not shared Refer to data on stack, each thread has its own stack But… only if you don’t give another thread a reference to a local variable Global variables are shared Stored in static data segment G lobally accessible by any thread Dynamic objects are shared Stored in the heap, shared if you have a pointer
10 .Mutual Exclusion Mutual exclusion synchronizes access to shared resources Code requiring mutual exclusion for correctness is a “critical section” Only one thread at a time can execute in critical section All other threads must wait to enter Only when a thread leaves can another can enter
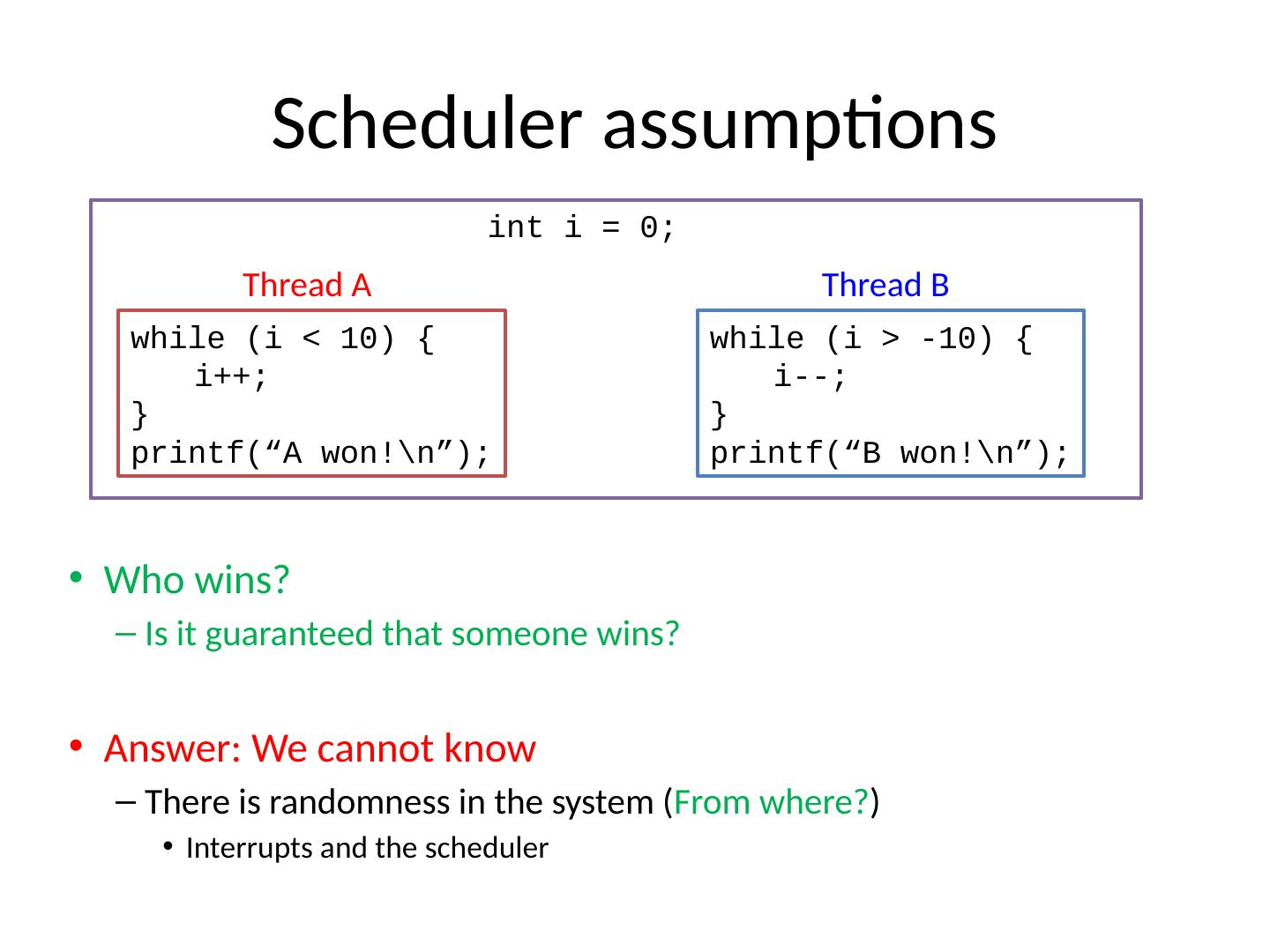
11 .Scheduler assumptions Who wins? Is it guaranteed that someone wins? Answer: We cannot know There is randomness in the system ( From where? ) Interrupts and the scheduler w hile ( i < 10) { i ++; } p rintf (“A won!
12 .Easy solution for uniprocessors Problem == Preemption Solution == Disable Preemption Sources of preemption Voluntary preemption: Controlled by thread Involuntary preemption: Controlled by Scheduler How is scheduler invoked? Solution: Disable interrupts and do not give up CPU On Linux w/ a single processor all spinlocks are translated to: asm (“cli”); and asm (“ sti ”);
13 .Critical Section Requirements Mutual exclusion Only one process in critical section at a time Progress (Deadlock free) A process in a critical section cannot block Cannot depend on other processes Bounded (Starvation free) Waiting processes must eventually proceed Performance Overhead of entering and exiting a critical section is small (relative to work done inside it) Busy waiting can cause serious problems (spin wait) Fair Don’t make some processes wait longer than others
14 .Implementing Critical Sections To implement critical sections, need atomic operations Atomic Operations: No other instructions can be interleaved Examples of atomic operations Memory accesses Loads & stores Cache coherency ensures atomicity Code between interrupts on a single CPU/core But interrupts can happen randomly… Must explicitly disable interrupts Special instructions Test-and-Set Compare-and-Swap Etc…
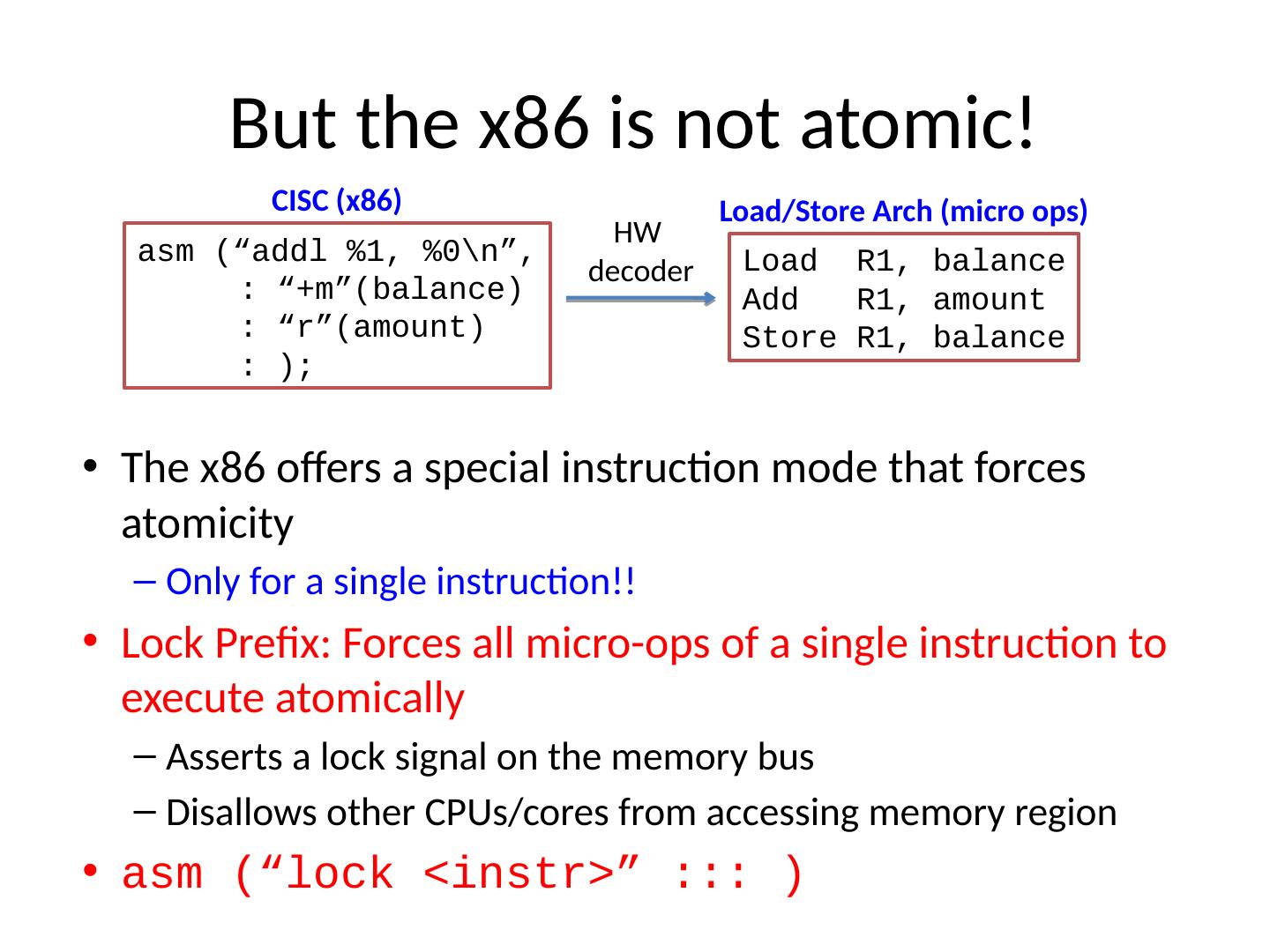
15 .But the x86 is not atomic! The x86 offers a special instruction mode that forces atomicity Only for a single instruction!! Lock Prefix: Forces all micro-ops of a single instruction to execute atomically Asserts a lock signal on the memory bus Disallows other CPUs/cores from accessing memory region a sm (“lock < instr >” :: : ) L oad R1, balance Add R1, amount Store R1, balance a sm (“ addl %1, %0
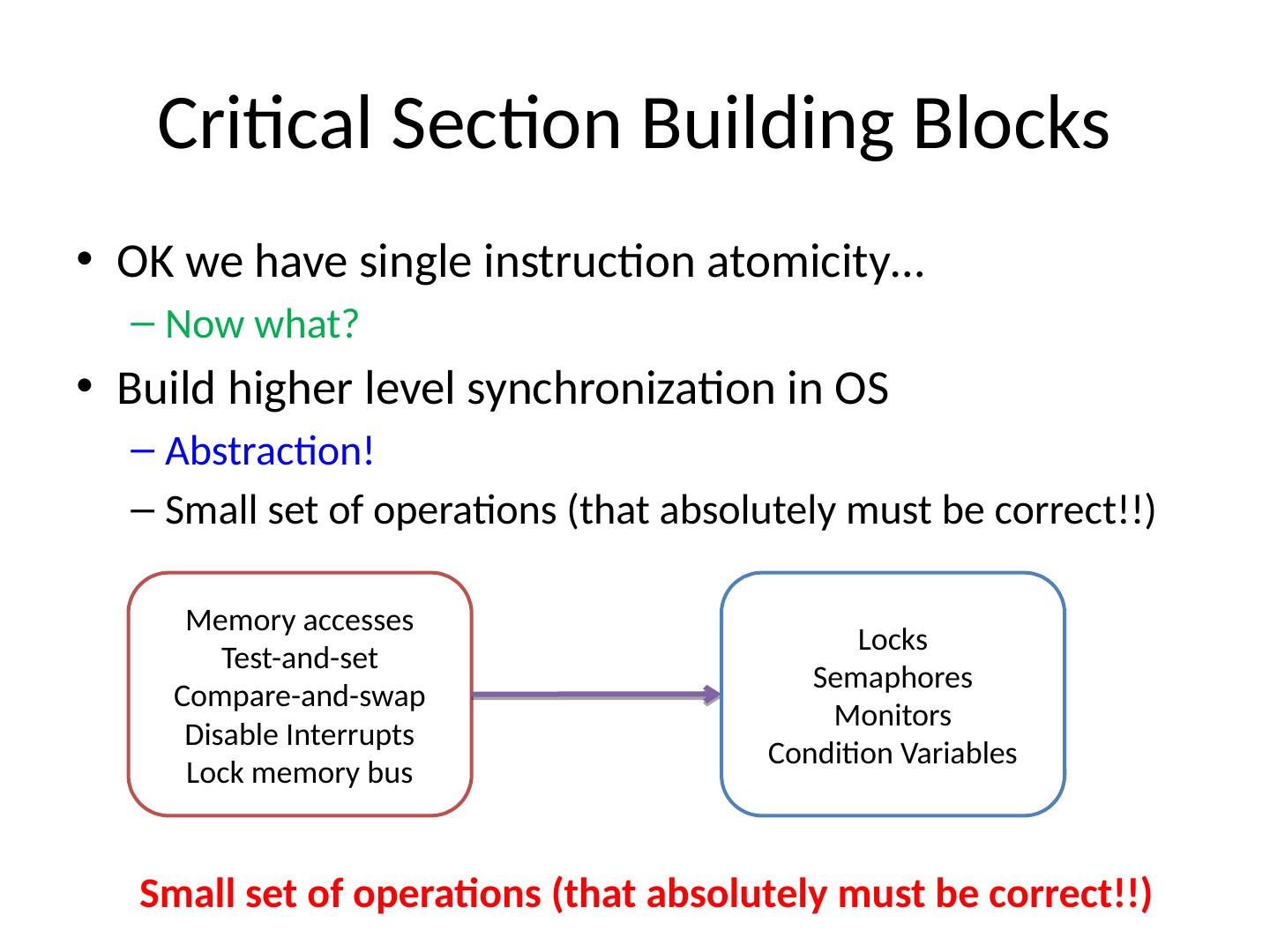
16 .Critical Section Building Blocks OK we have single instruction atomicity… Now what? Build higher level synchronization in OS Abstraction! Small set of operations (that absolutely must be correct!!) Memory accesses Test-and-set Compare-and-swap Disable Interrupts Lock memory bus Locks Semaphores Monitors Condition Variables Small set of operations (that absolutely must be correct!!)
17 .Mechanisms for Building Critical Sections Locks Very primitive with minimal semantics Used heavily in kernel Semaphores Basic Easy to understand Hard to use Monitors High level M odern variants require language support (i.e. Java: synchronized) Linux Kernel: Wait queues
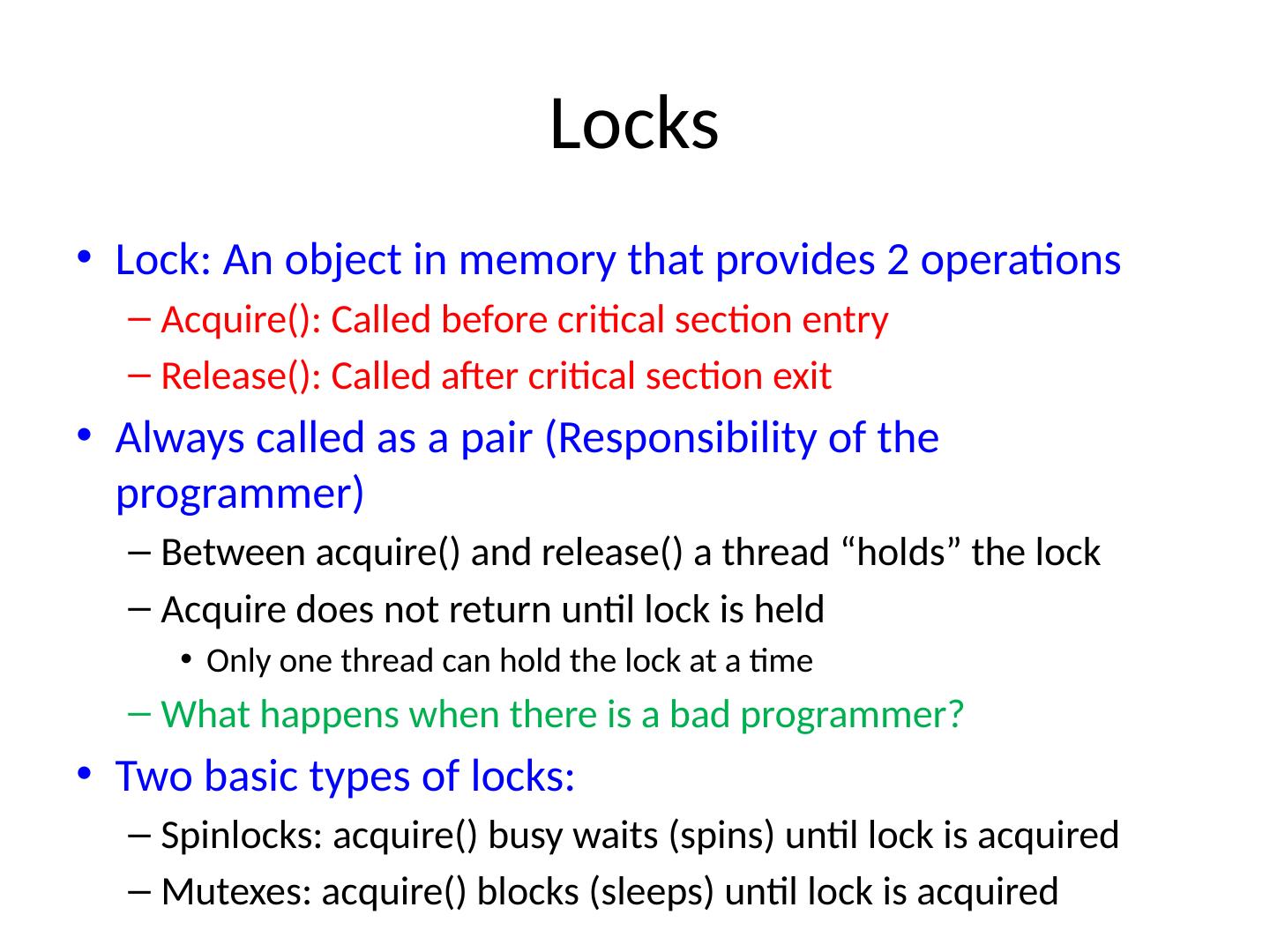
18 .Locks Lock: An object in memory that provides 2 operations Acquire(): Called before critical section entry Release(): Called after critical section exit Always called as a pair (Responsibility of the programmer) Between acquire() and release() a thread “holds” the lock Acquire does not return until lock is held Only one thread can hold the lock at a time What happens when there is a bad programmer? Two basic types of locks: Spinlocks: acquire() busy waits (spins) until lock is acquired Mutexes : acquire() blocks (sleeps) until lock is acquired
19 .Using Locks What happens at the 2 nd acquire()? What would happen if this was a uniprocessor and: Acquire(lock) => asm (“cli”); Release(lock) => asm (“ sti ”); int withdraw( int amount){ balance -= amount; return balance; } int withdraw( int amount ){ acquire(lock); balance -= amount; release(lock); return balance; } a cquire(lock); balance -= amount; acquire(lock) r elease(lock); b alance -= amount; r elease(lock);
20 .Using locks badly Why not this? Will this work correctly? Always try to keep critical sections as small as possible Helps p erformance, reduces bugs, easier to read, etc… int withdraw( int amount){ balance -= amount; return balance; } int main() { int balance = 0; acquire(lock); balance = withdraw(10); release(lock); return balance; }
21 .Locks without hardware support Its not pretty… Peterson’s algorithm Assume 2 threads tid -> Thread ID (0,1) int turn = 0; // shared variable b ool lock[2] = {false, false}; i nt withdraw( int amount) { lock[ tid ] = true; turn = 1 – tid ; while (lock[1 - tid ] && (turn == (1 – tid ))); // spin balance -= amount; // critical section lock[ tid ] = false; return balance; }
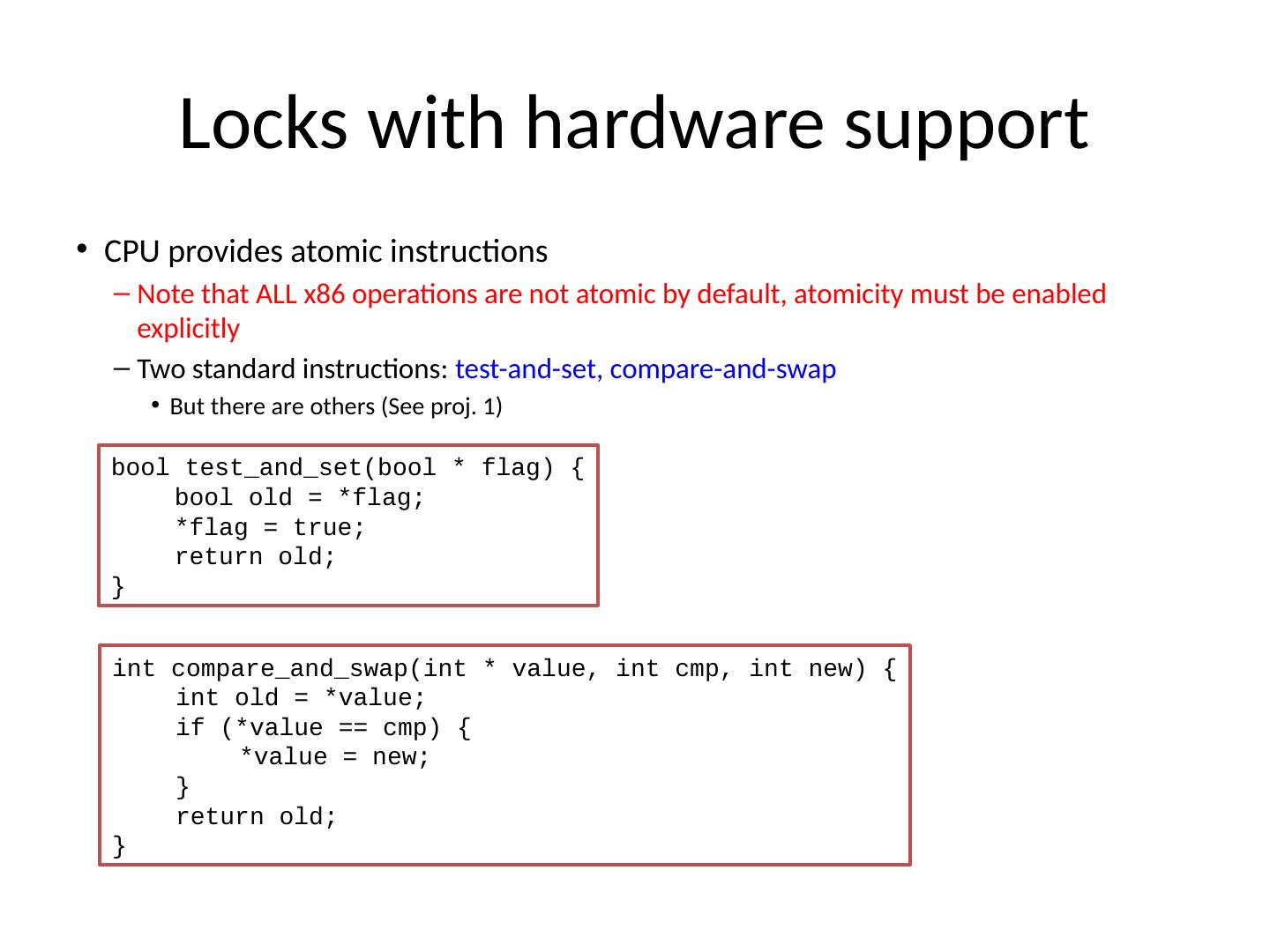
22 .Locks with hardware support CPU provides atomic instructions Note that ALL x86 operations are not atomic by default, atomicity must be enabled explicitly Two standard instructions: test-and-set, compare-and-swap But there are others (See proj . 1) bool test_and_set ( bool * flag) { bool old = *flag; *flag = true; return old; } i nt compare_and_swap ( int * value, int cmp , int new) { int old = *value; if (*value == cmp ) { *value = new; } return old; }
23 .S pinlocks Basic form of mutual exclusion Busy wait until a lock is available while (!acquire(lock)); Problems: Wastes resources while trying to acquire lock Under contention utilization goes way down Notes: Only use for very short critical sections Do not sleep with a lock held!
24 .Reader writer locks Like spin locks for read-mostly data Reading is only sensitive if it is being actively modified If modifications are rare then it doesn’t make sense to serialize readers Must make sure not to starve writers acquire( write_lock ) acquire( read_lock )
25 .Barriers Synchronize execution into a sequence of stages Mostly used in parallel computation (time steps) Each thread waits until every other thread is at the same location: barrier_wait (); Once every thread arrives, continue; Ensures that execution occurs in lock step across all threads Barrier Barrier Barrier
26 .Wait Queues Locking is bad Busy waiting wastes resources How do we use time waiting to do other stuff Wait Queues Sleep until an event arrives Require signal from other thread to indicate status has changed Re-evaluate current state before continuing
27 .RCU Read-copy-update Replacement for reader-writer locks Does not actually use locks Creates different versions of shared data Modifying data creates a new copy Future readers access new copy Old readers still have old version Must garbage collect Only after all readers are done But how do we know? Quiescent state Place requirements on reader contexts (cannot sleep) Therefore if a CPU with a reader has slept, then reader is done
28 .Transactional memory Embed transaction processing into memory system Memory syste m tracks memory touched inside critical section (transaction) If another thread modifies same data, transaction aborts Execution returns to initial state Memory contents reset to initial values Present on latest Intel Haswell CPUs
3秒后跳转登录页面
去登陆

