



- 快召唤伙伴们来围观吧
- 微博 QQ QQ空间 贴吧
- 文档嵌入链接
- 复制
- 微信扫一扫分享
- 已成功复制到剪贴板
10-Scalable Synchronization
Scalable Locking
Barriers
展开查看详情
1 .CSC2/458 Parallel and Distributed Systems Scalable Synchronization Sreepathi Pai February 20, 2018 URCS
2 .Outline Scalable Locking Barriers
3 .Outline Scalable Locking Barriers
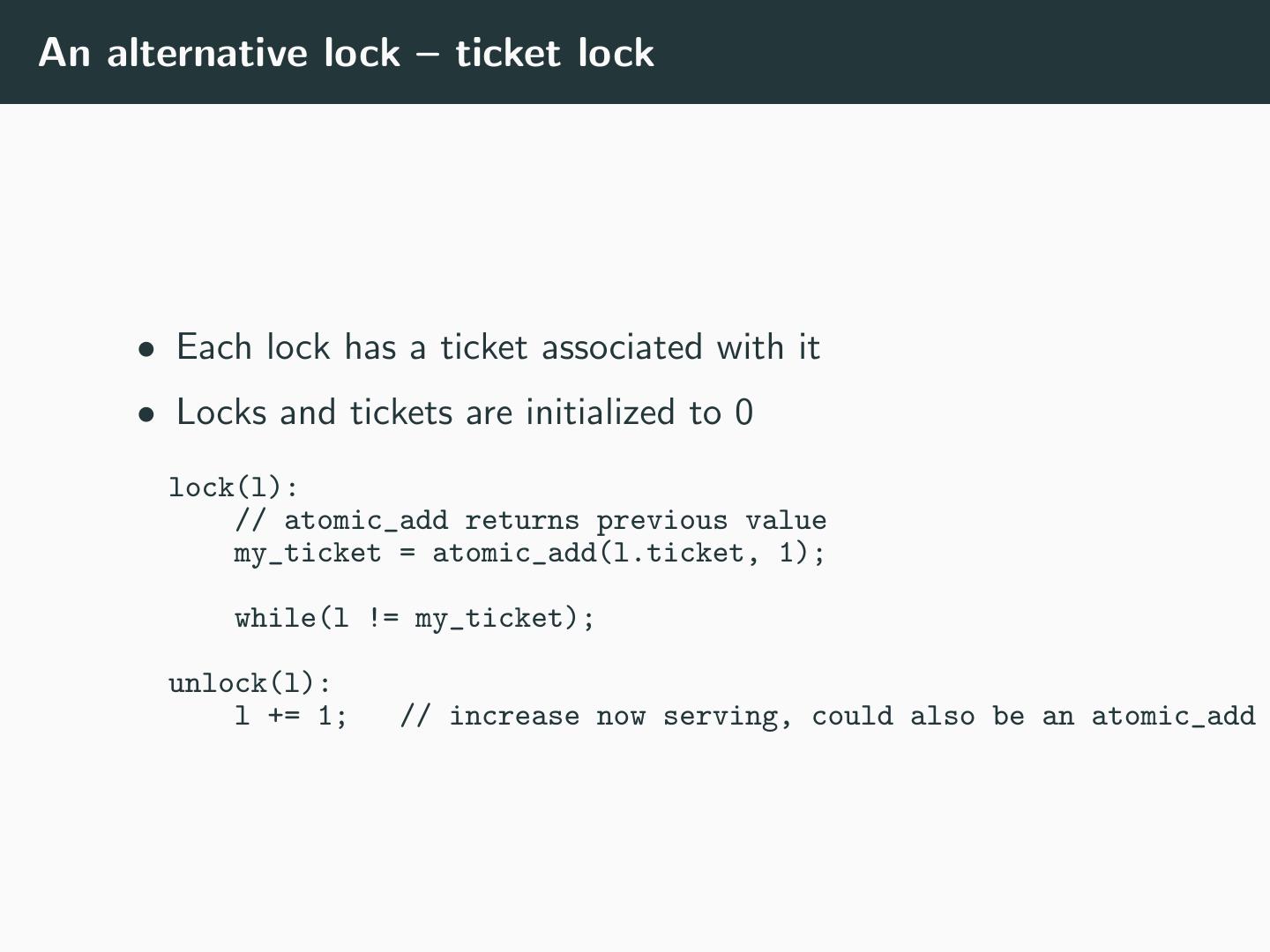
4 .An alternative lock – ticket lock • Each lock has a ticket associated with it • Locks and tickets are initialized to 0 lock(l): // atomic_add returns previous value my_ticket = atomic_add(l.ticket, 1); while(l != my_ticket); unlock(l): l += 1; // increase now serving, could also be an atomic_add
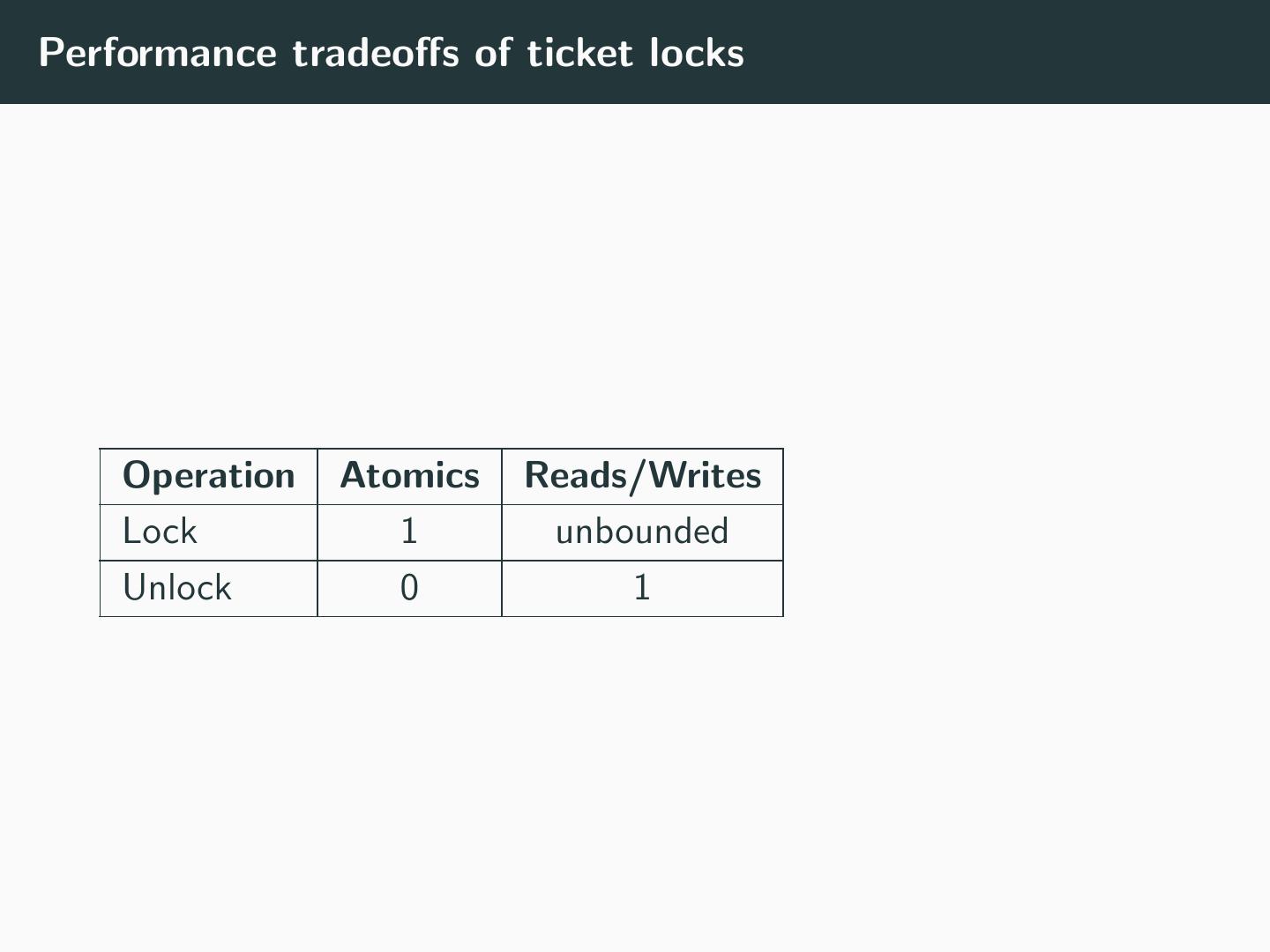
5 .Performance tradeoffs of ticket locks Operation Atomics Reads/Writes Lock 1 unbounded Unlock 0 1
6 .Review of a ticket lock • 1 atomic per lock(), so O(n) atomics when n threads contend • O(1) space per lock • Unbounded reads/writes • Lock can be in remote cache • Generates cache coherence traffic while threads are waiting • Fair • Threads are granted locks in FIFO order • But what happens when threads in queue are pre-empted?
7 .Internals of a ticket lock • On a lock • Atomic to increment the ticket • Read on “now-serving” ticket • On an unlock • Increase of “now-serving” ticket • Broadcast of this update to all readers
8 .Queues vs Broadcast If you’re standing in a queue, who do you need to monitor?
9 .Queueing Locks • Use a queue to maintain waiting threads • Threads in queue acquire locks in FIFO order • A thread that releases a lock only notifies the next thread in the queue • Essentially transferring ownership of the lock
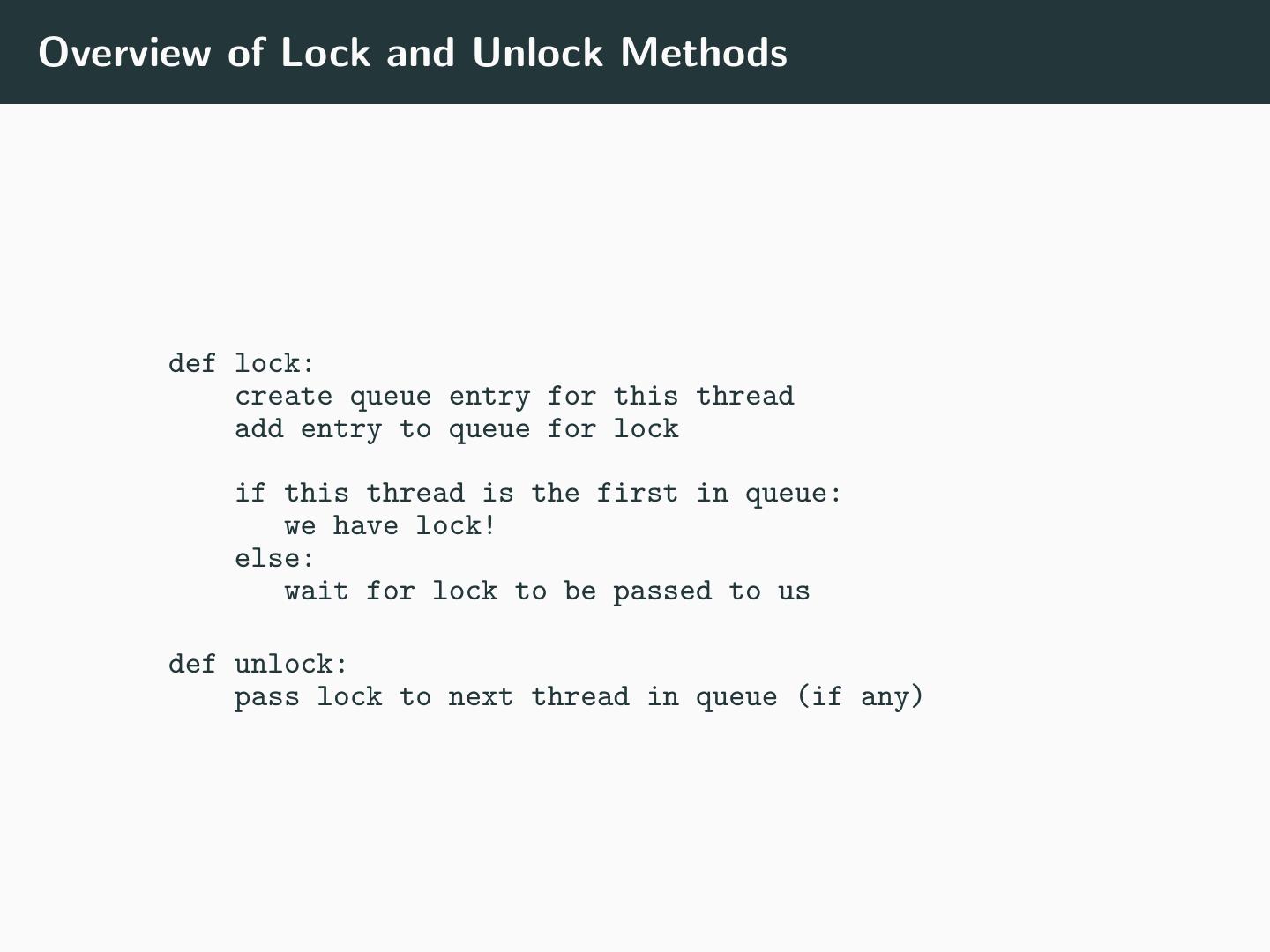
10 .Overview of Lock and Unlock Methods def lock: create queue entry for this thread add entry to queue for lock if this thread is the first in queue: we have lock! else: wait for lock to be passed to us def unlock: pass lock to next thread in queue (if any)
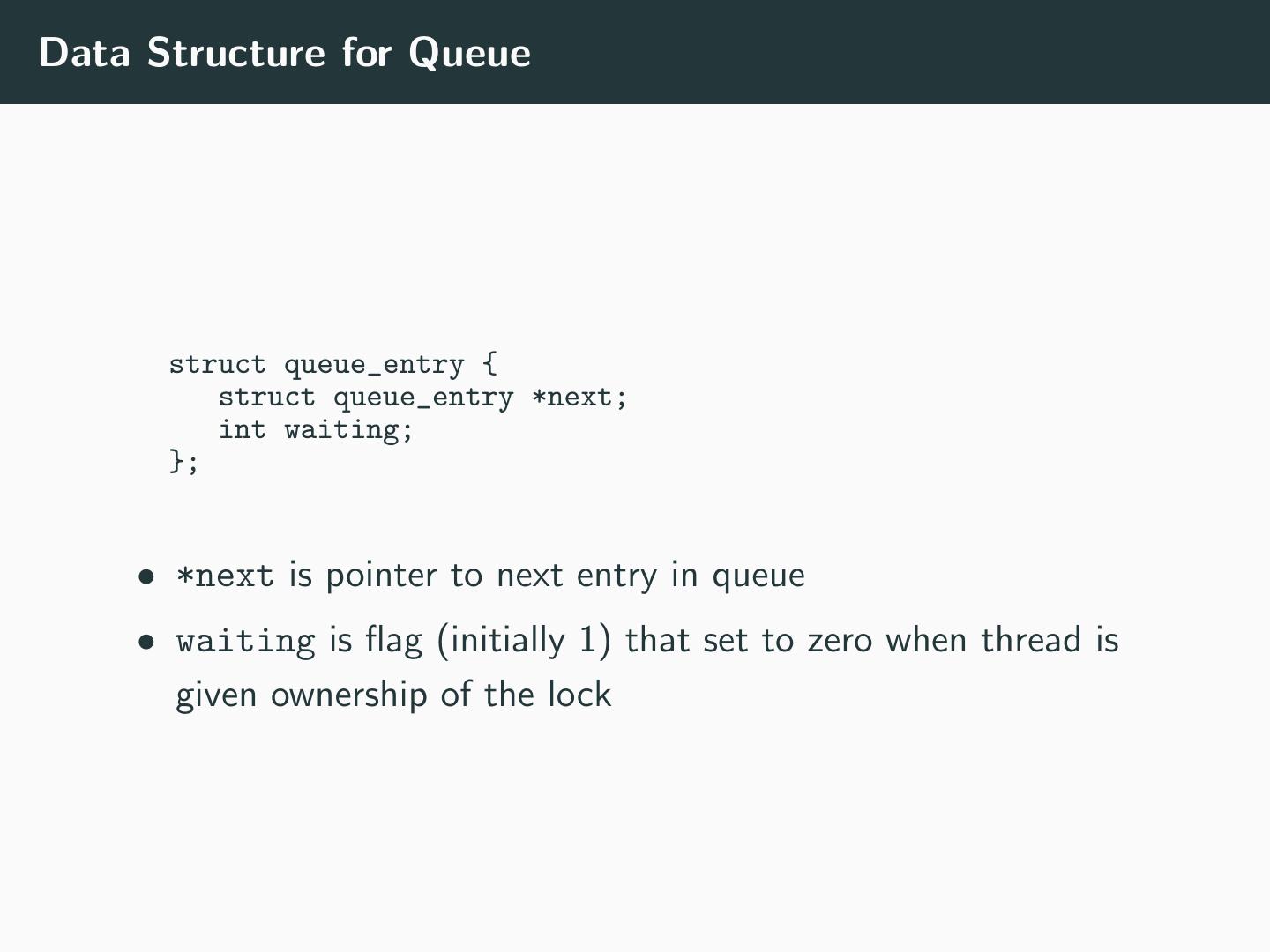
11 .Data Structure for Queue struct queue_entry { struct queue_entry *next; int waiting; }; • *next is pointer to next entry in queue • waiting is flag (initially 1) that set to zero when thread is given ownership of the lock
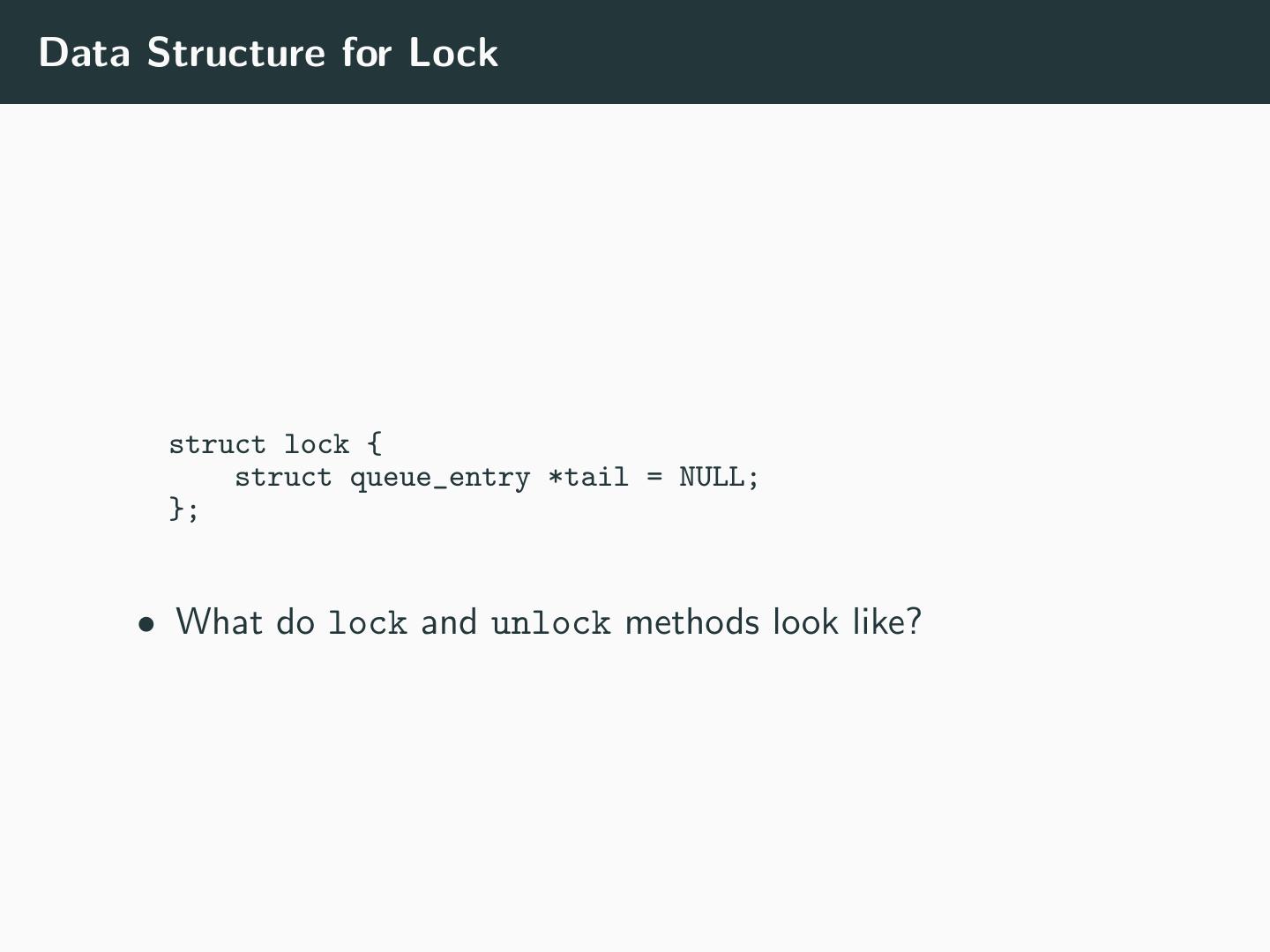
12 .Data Structure for Lock struct lock { struct queue_entry *tail = NULL; }; • What do lock and unlock methods look like?
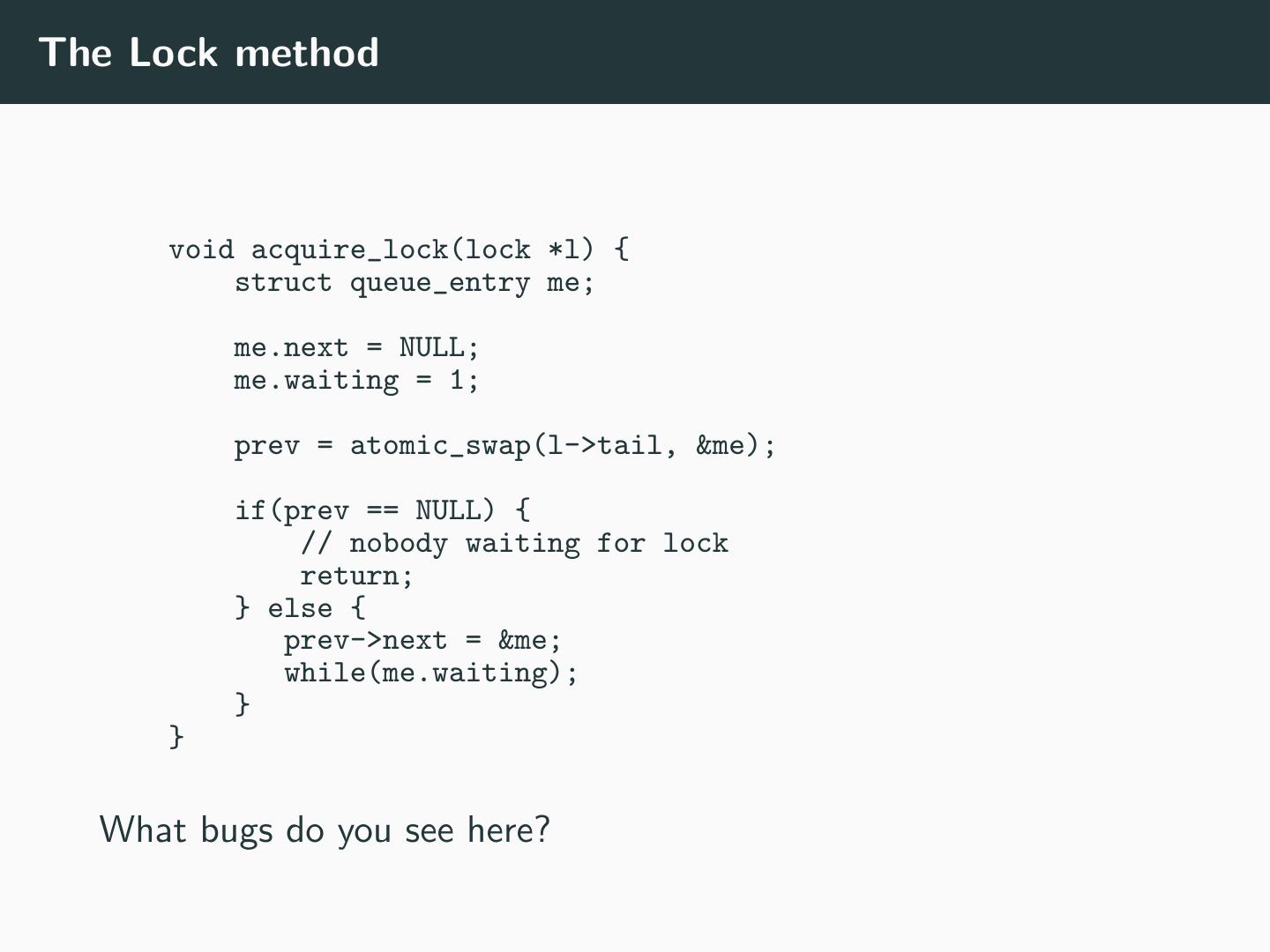
13 .The Lock method void acquire_lock(lock *l) { struct queue_entry me; me.next = NULL; me.waiting = 1; prev = atomic_swap(l->tail, &me); if(prev == NULL) { // nobody waiting for lock return; } else { prev->next = &me; while(me.waiting); } } What bugs do you see here?
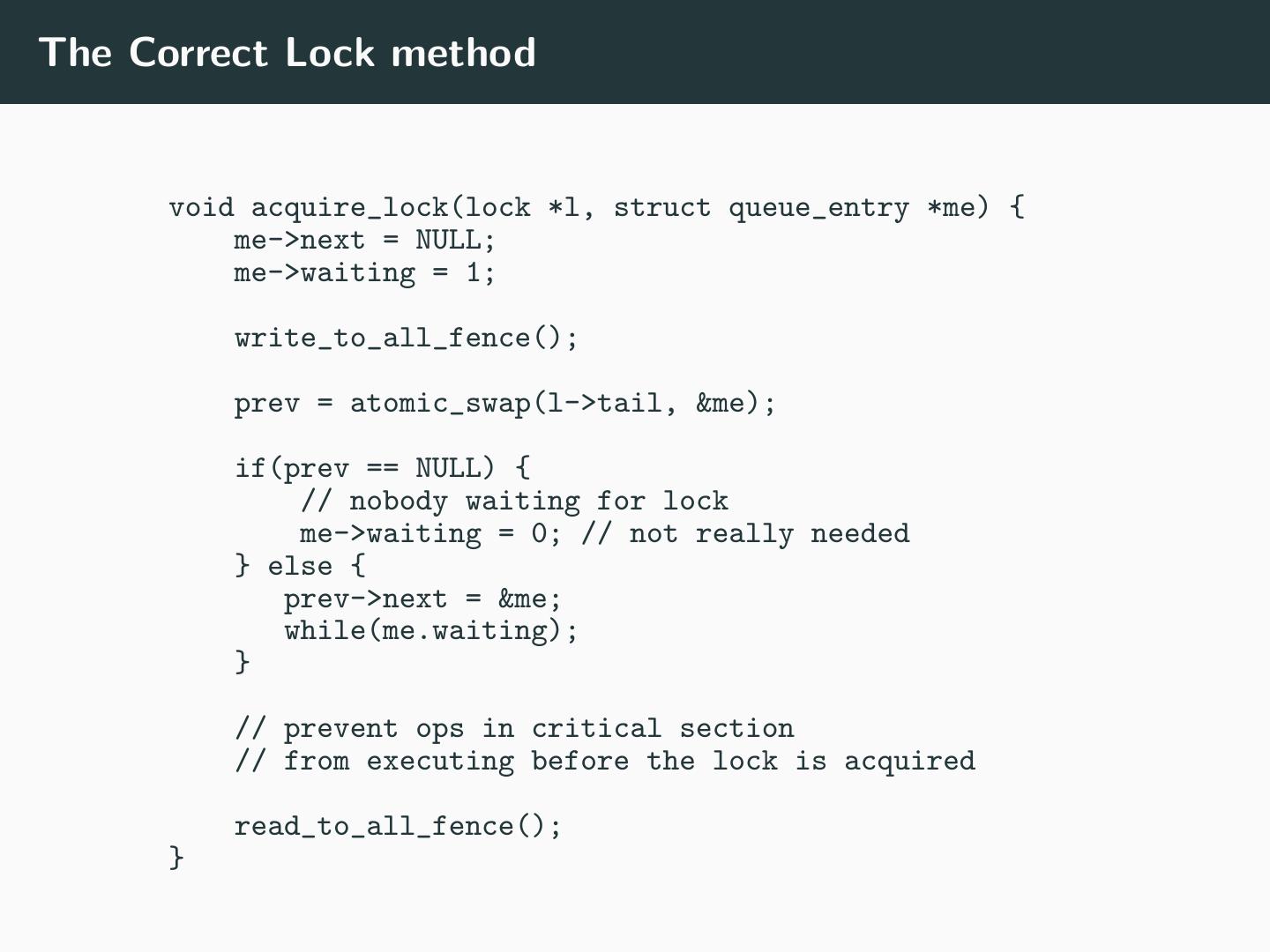
14 .The Correct Lock method void acquire_lock(lock *l, struct queue_entry *me) { me->next = NULL; me->waiting = 1; write_to_all_fence(); prev = atomic_swap(l->tail, &me); if(prev == NULL) { // nobody waiting for lock me->waiting = 0; // not really needed } else { prev->next = &me; while(me.waiting); } // prevent ops in critical section // from executing before the lock is acquired read_to_all_fence(); }
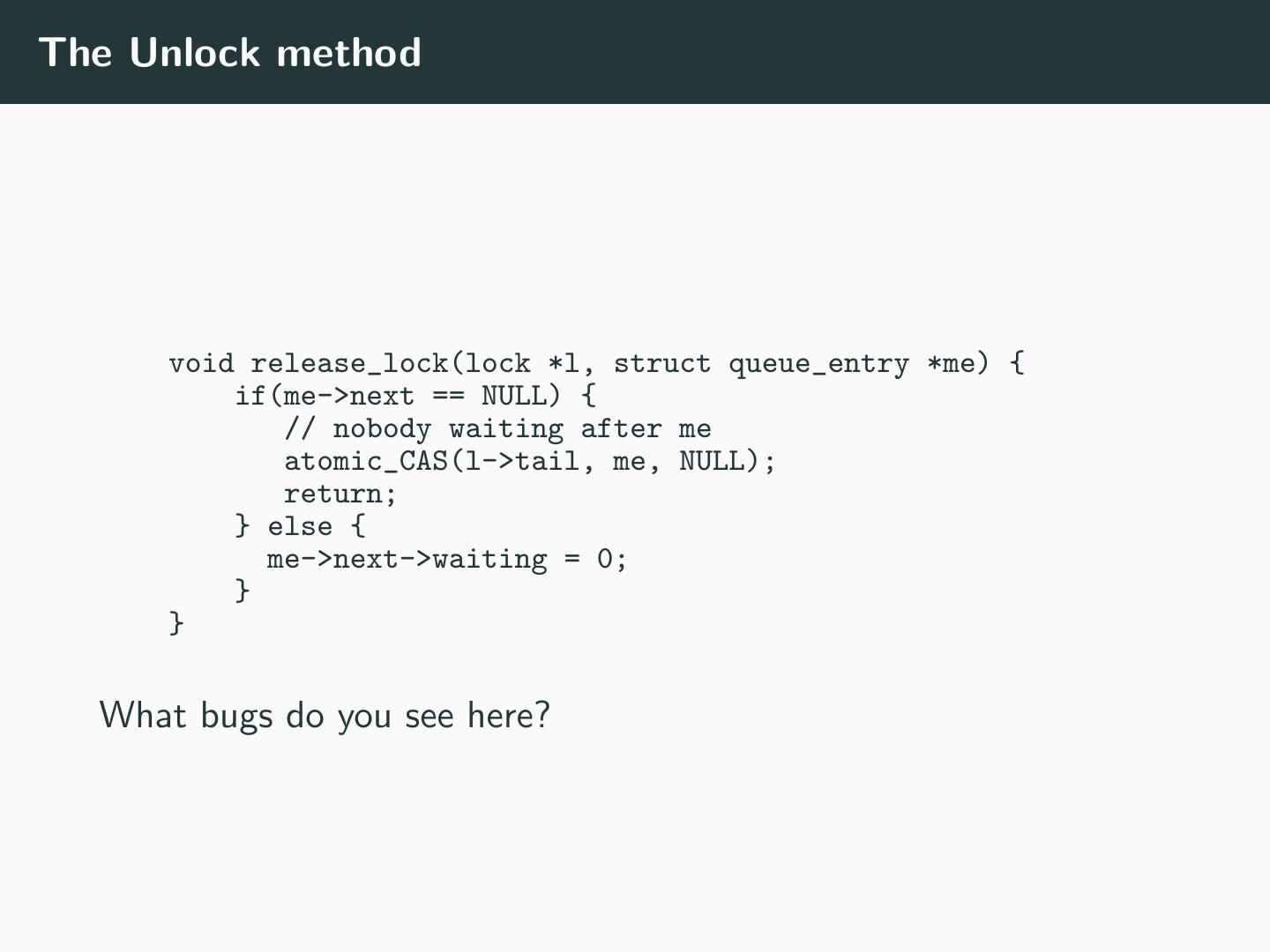
15 .The Unlock method void release_lock(lock *l, struct queue_entry *me) { if(me->next == NULL) { // nobody waiting after me atomic_CAS(l->tail, me, NULL); return; } else { me->next->waiting = 0; } } What bugs do you see here?
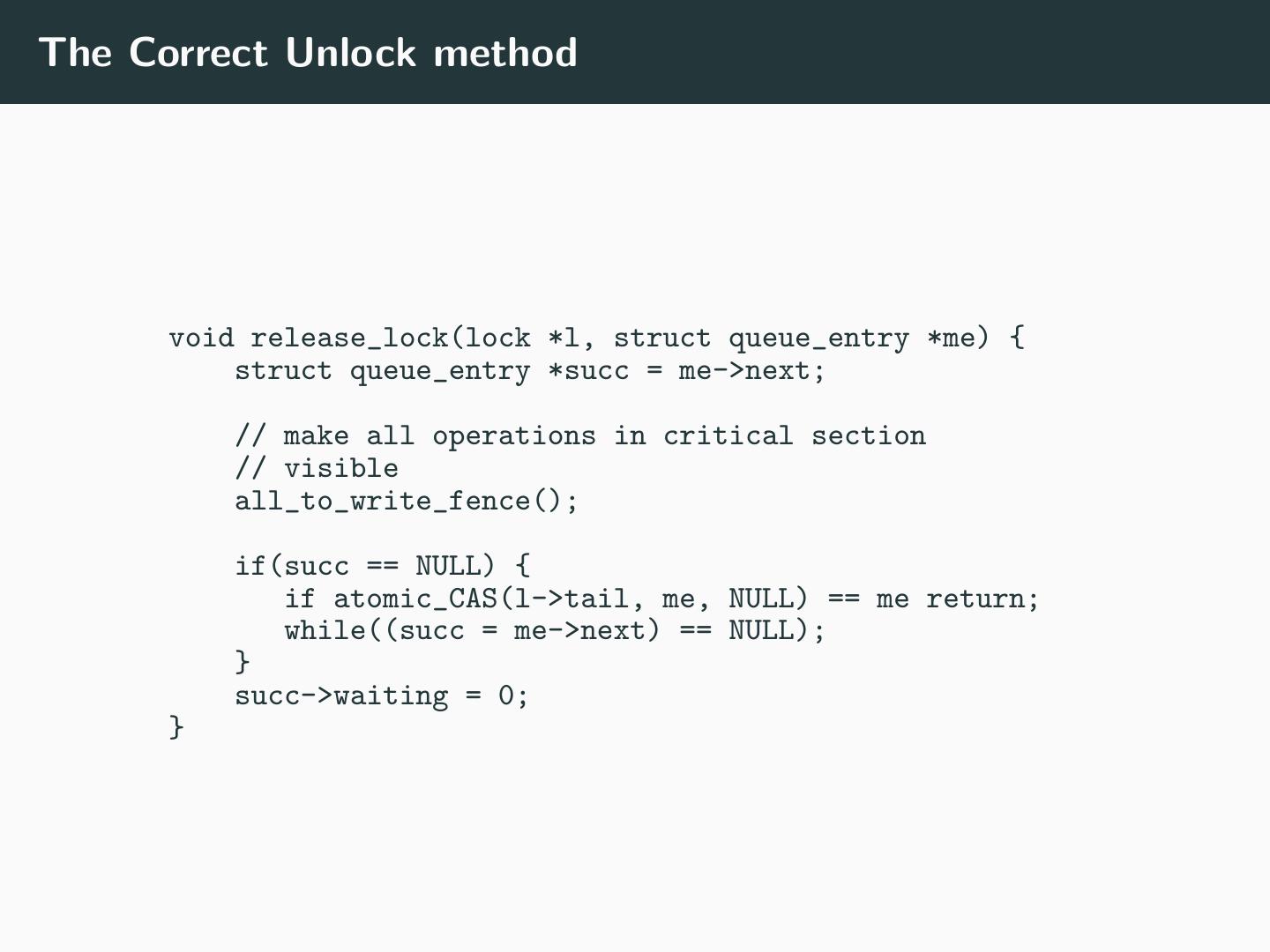
16 .The Correct Unlock method void release_lock(lock *l, struct queue_entry *me) { struct queue_entry *succ = me->next; // make all operations in critical section // visible all_to_write_fence(); if(succ == NULL) { if atomic_CAS(l->tail, me, NULL) == me return; while((succ = me->next) == NULL); } succ->waiting = 0; }
17 .The MCS Lock What we have just described is the Mellor-Crummey–Scott (MCS) lock. • How does the MCS lock compare to the ticket lock? • In atomics? • In reads? • In writes? • In space? • In API/interface?
18 .Outline Scalable Locking Barriers
19 .Barriers • Barriers (and Condition variables) are synchronization mechanisms like locks • Generally not used for mutual exclusion • Mostly used for communication/“synchronization” • Threads wait for other threads to arrive at a barrier
20 .Barrier Interface • Creation • barrier.create(n) where n is number of threads participating • Waiting for other threads to arrive • barrier.sync() - blocks until all participating threads have invoked sync • Barriers are commonly used many times • Uncommonly used, but useful sometimes: • barrier.arrive() – thread has arrived at barrier and moved on • Not discussing this, but you will study them • Destruction
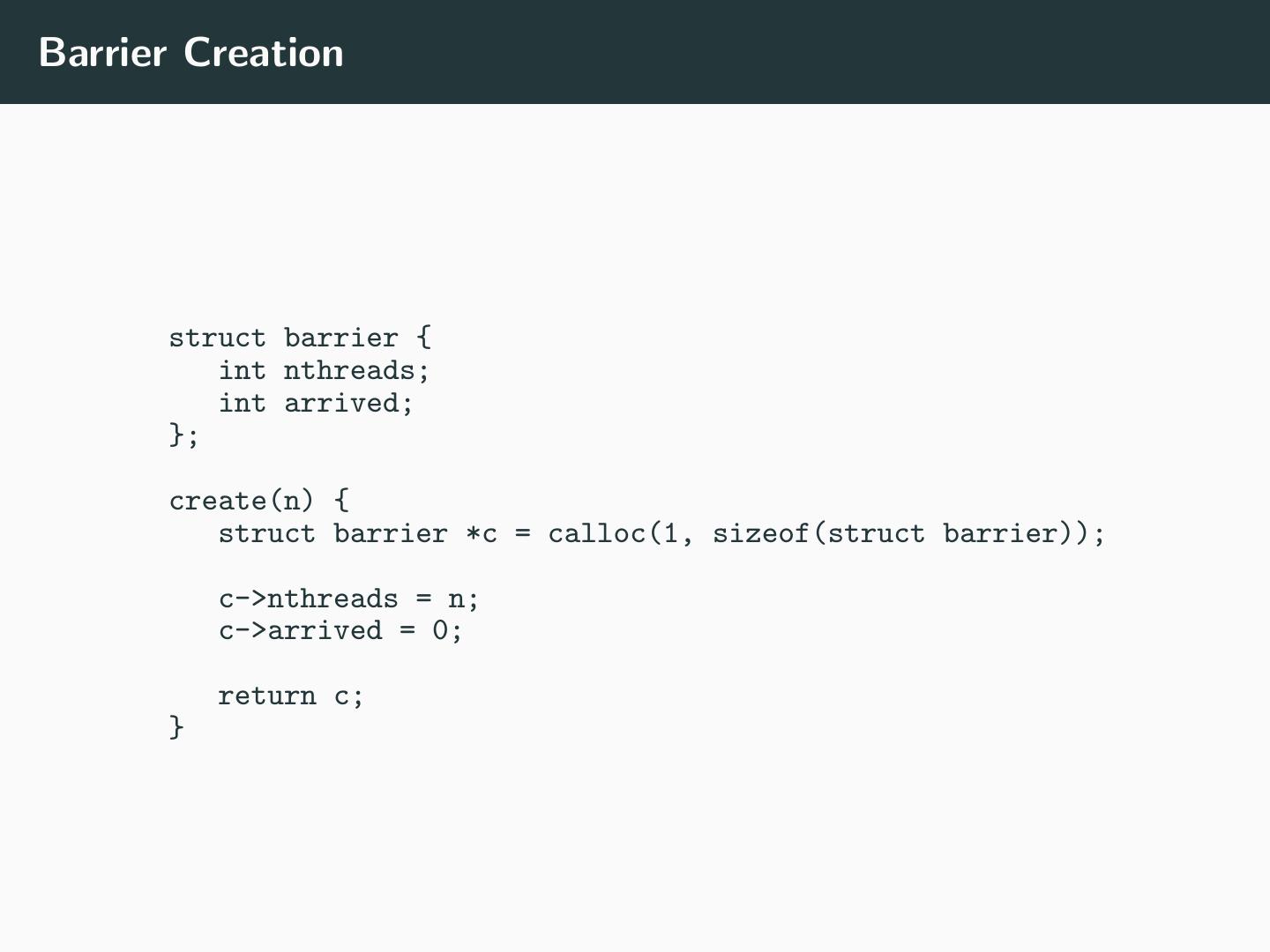
21 .Barrier Creation struct barrier { int nthreads; int arrived; }; create(n) { struct barrier *c = calloc(1, sizeof(struct barrier)); c->nthreads = n; c->arrived = 0; return c; }
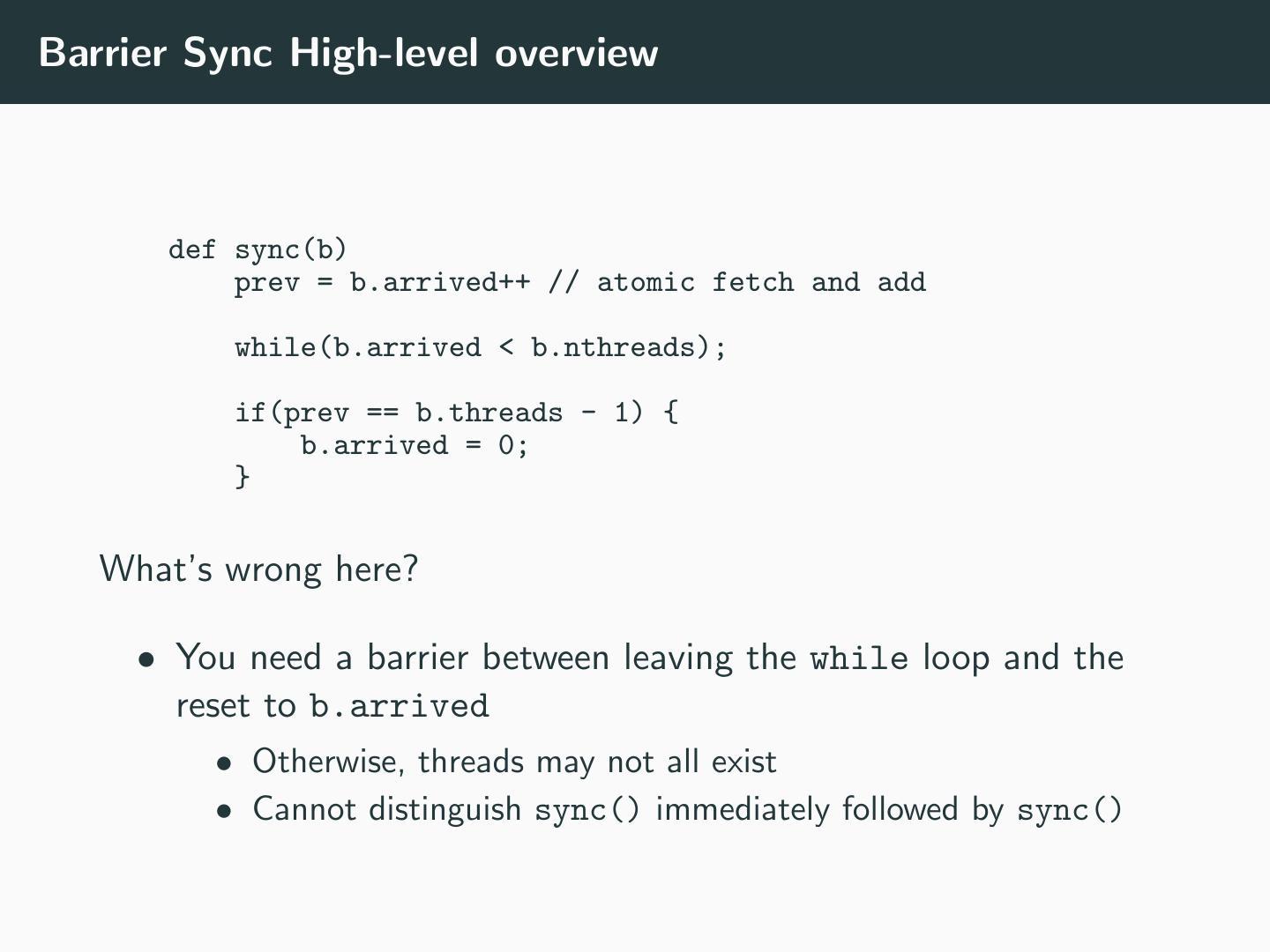
22 .Barrier Sync High-level overview def sync(b) prev = b.arrived++ // atomic fetch and add while(b.arrived < b.nthreads); if(prev == b.threads - 1) { b.arrived = 0; } What’s wrong here? • You need a barrier between leaving the while loop and the reset to b.arrived • Otherwise, threads may not all exist • Cannot distinguish sync() immediately followed by sync()
23 .Sense-reversing barriers • Separate: • Count of arriving threads • Waiting
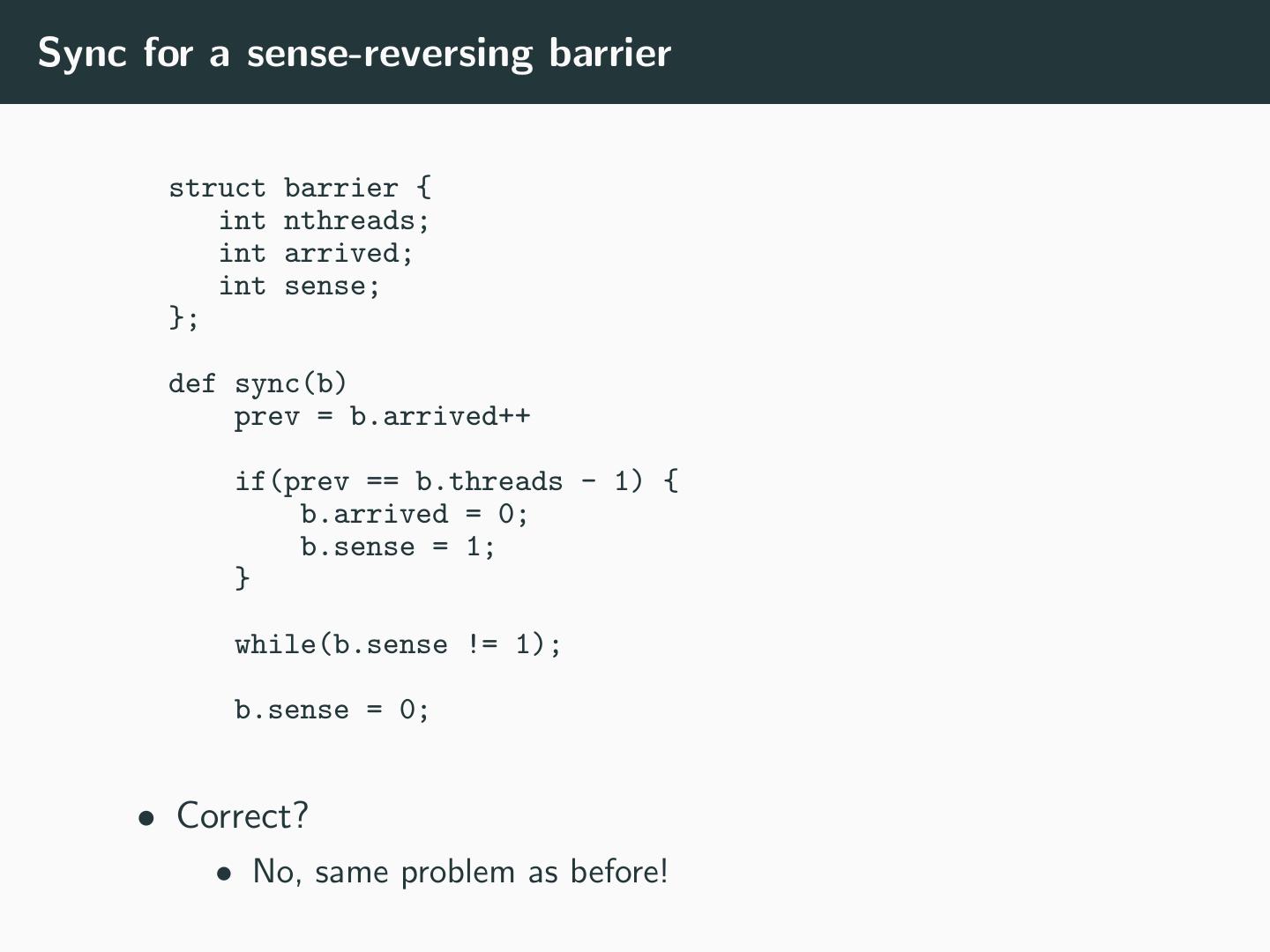
24 .Sync for a sense-reversing barrier struct barrier { int nthreads; int arrived; int sense; }; def sync(b) prev = b.arrived++ if(prev == b.threads - 1) { b.arrived = 0; b.sense = 1; } while(b.sense != 1); b.sense = 0; • Correct? • No, same problem as before!
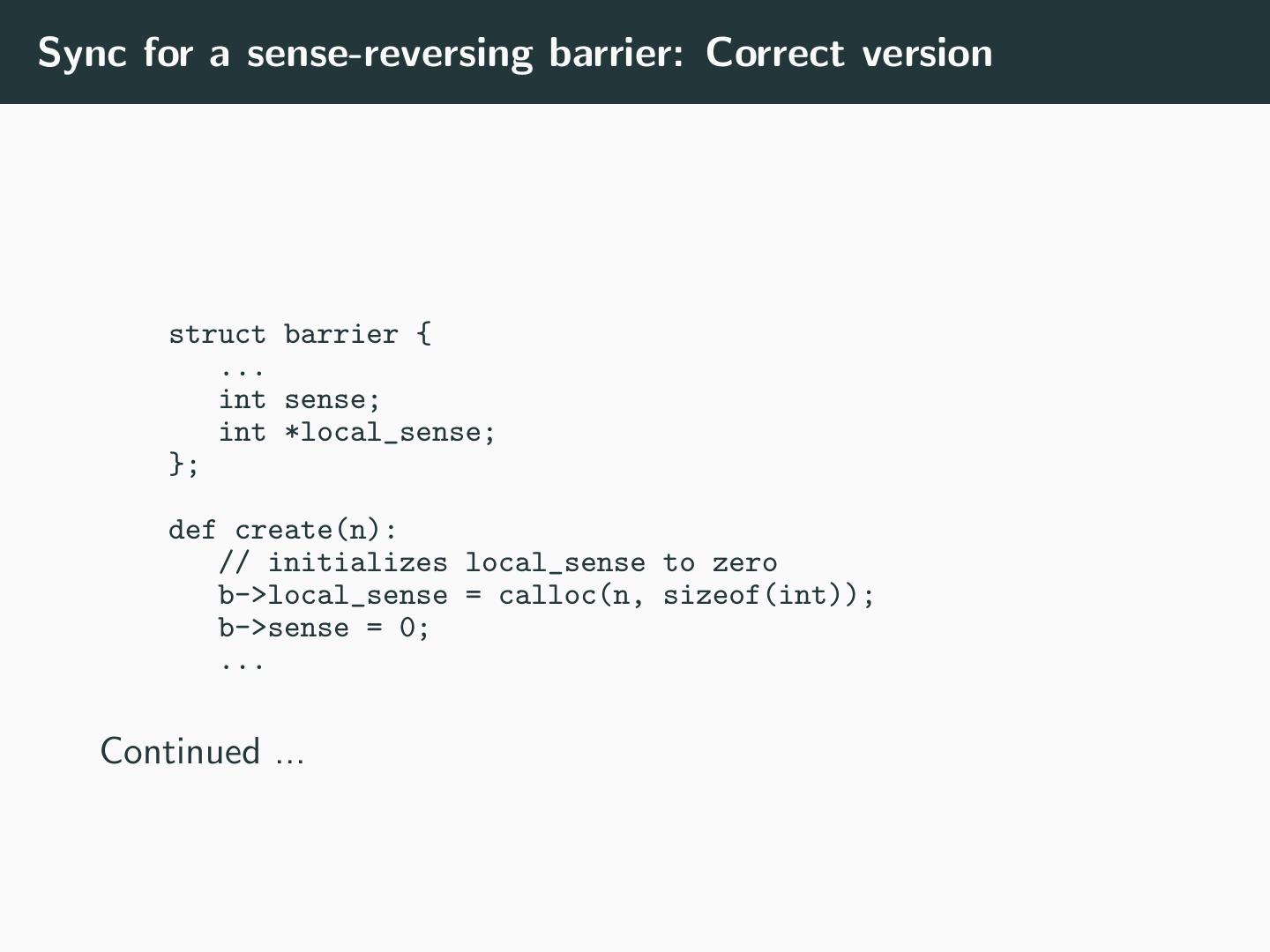
25 .Sync for a sense-reversing barrier: Correct version struct barrier { ... int sense; int *local_sense; }; def create(n): // initializes local_sense to zero b->local_sense = calloc(n, sizeof(int)); b->sense = 0; ... Continued ...
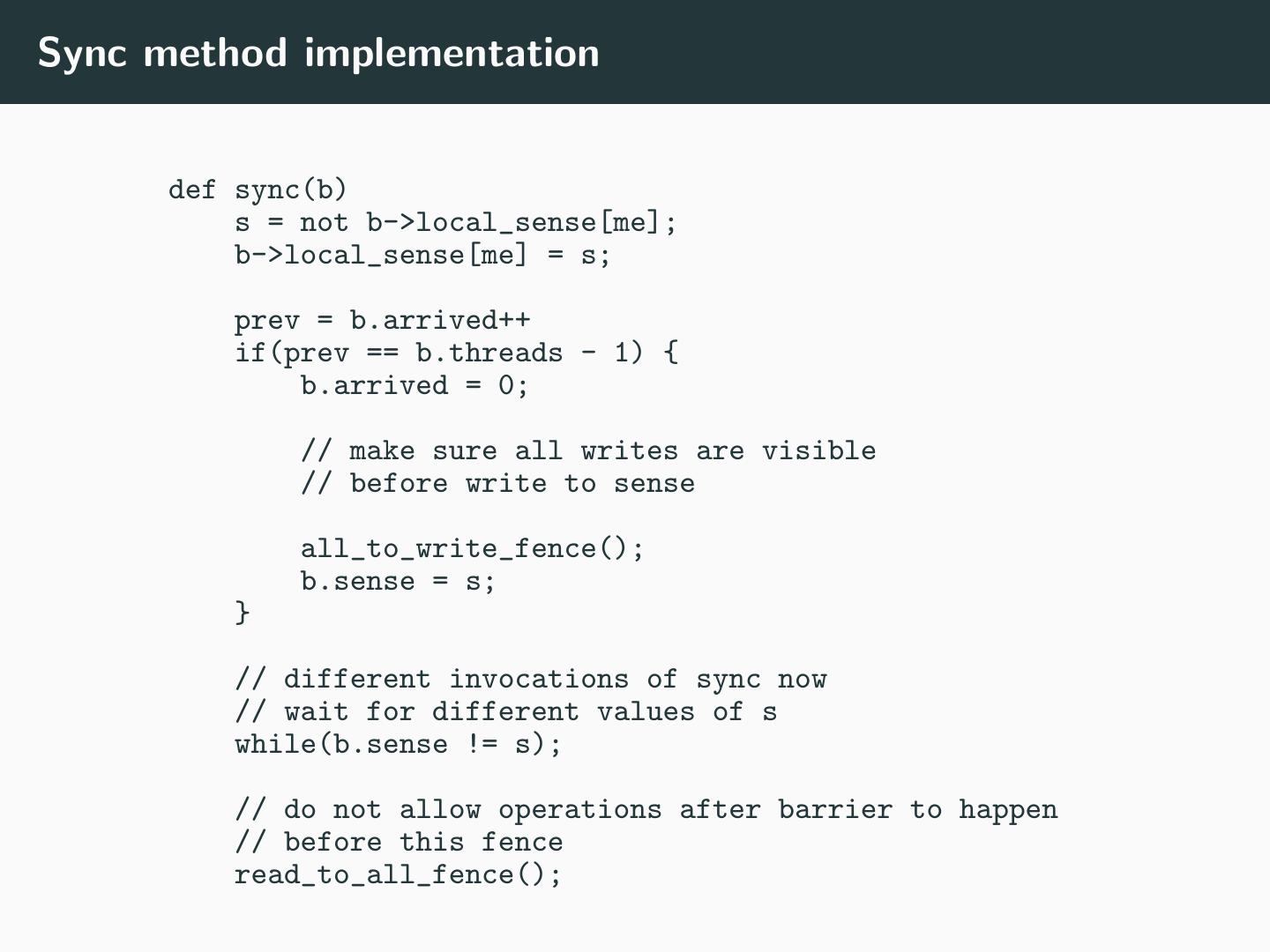
26 .Sync method implementation def sync(b) s = not b->local_sense[me]; b->local_sense[me] = s; prev = b.arrived++ if(prev == b.threads - 1) { b.arrived = 0; // make sure all writes are visible // before write to sense all_to_write_fence(); b.sense = s; } // different invocations of sync now // wait for different values of s while(b.sense != s); // do not allow operations after barrier to happen // before this fence read_to_all_fence();
27 .Scalable Barriers? • Do all threads need to read sense? • Barriers are computing a sum • Can this be done in parallel?
3秒后跳转登录页面
去登陆

