展开查看详情
1 .Interest Points EE/CSE 576 Linda Shapiro
2 .2 Preview: Harris detector Interest points extracted with Harris (~ 500 points)
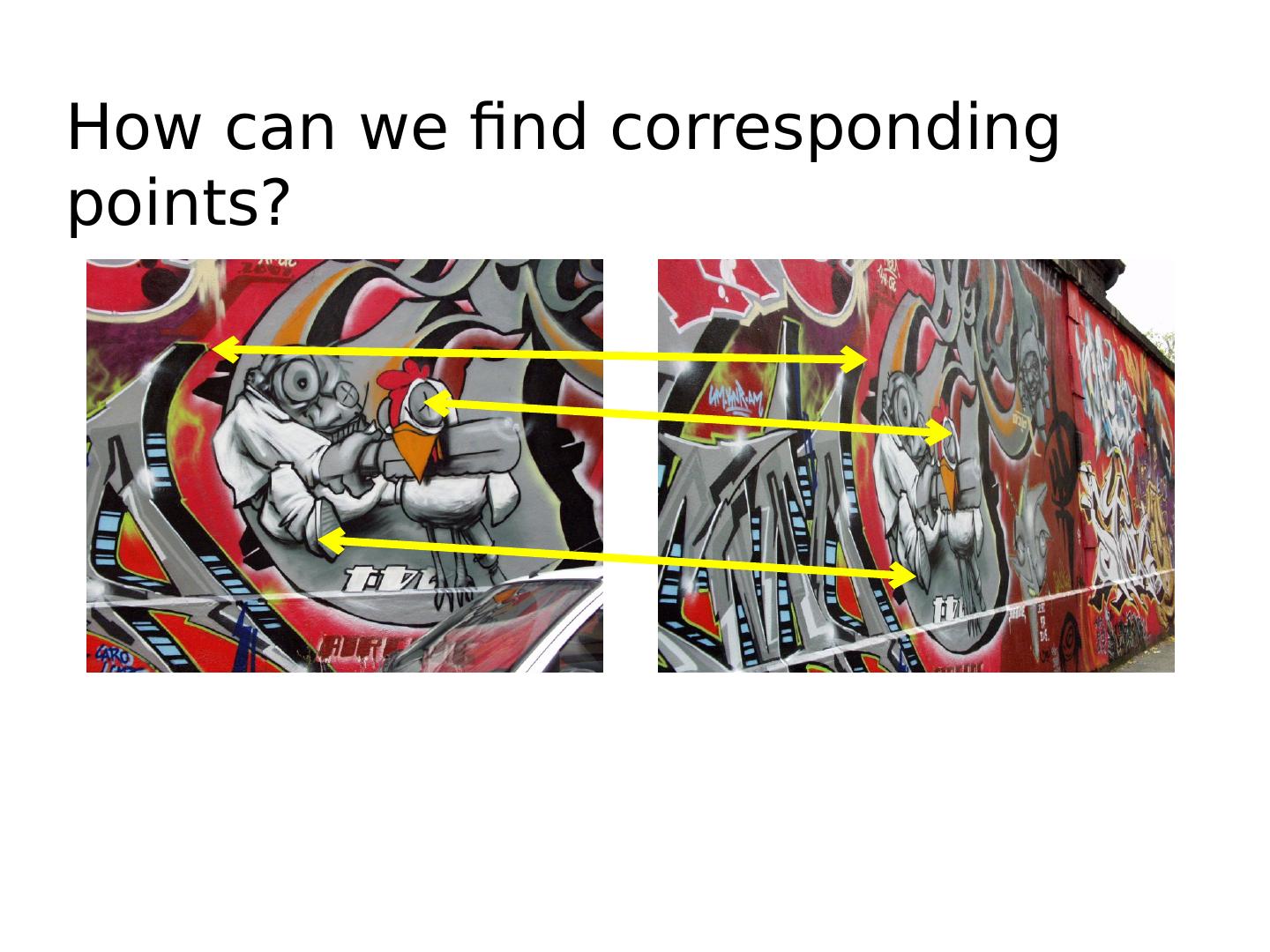
3 .How can we find corresponding points?
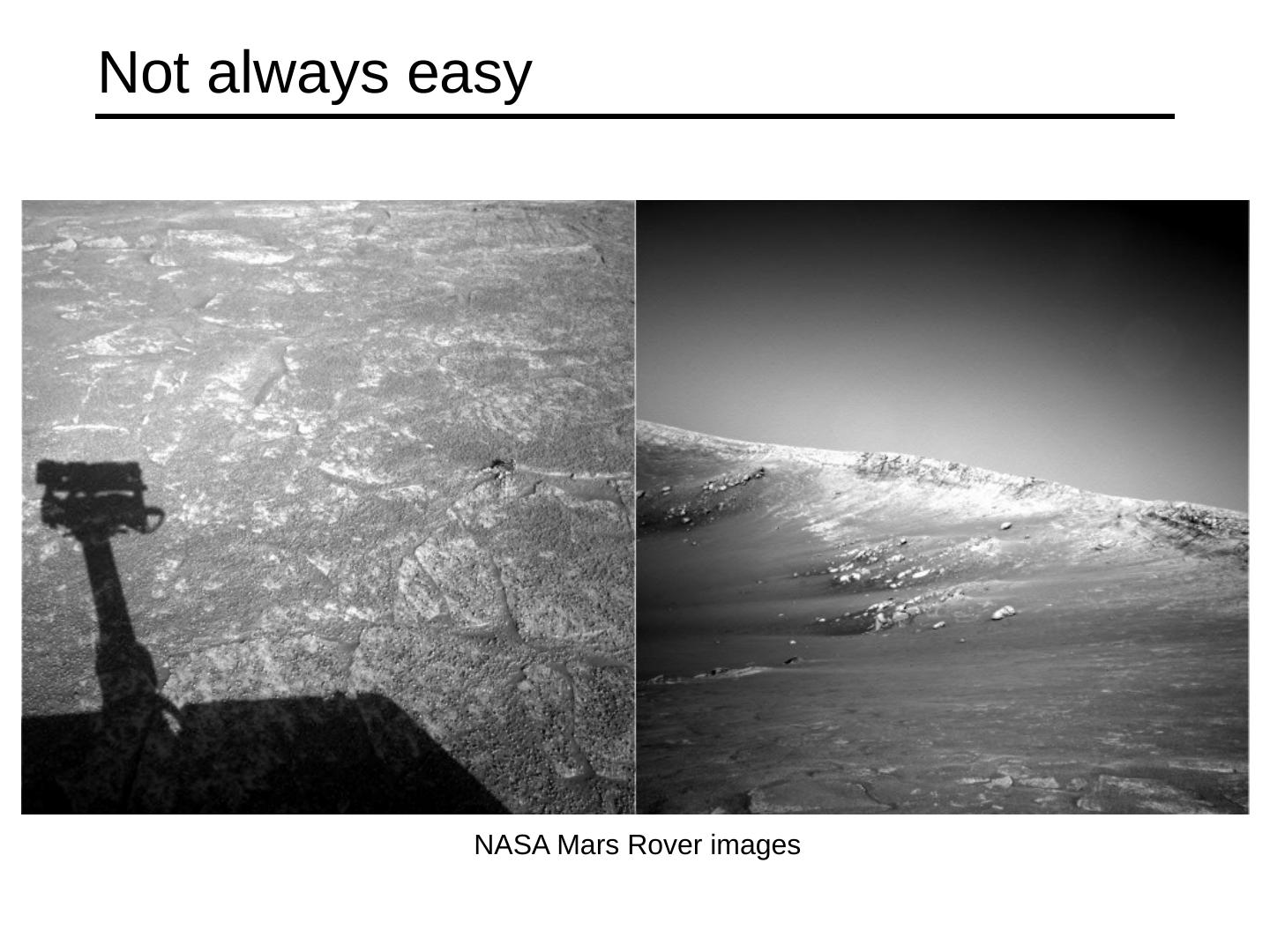
4 .Not always easy NASA Mars Rover images
5 .NASA Mars Rover images
6 .Let’s look at the gradient distributions
7 .Principal Component Analysis Principal component is the direction of highest variance. How to compute PCA components: Subtract off the mean for each data point. Compute the covariance matrix. Compute eigenvectors and eigenvalues. The components are the eigenvectors ranked by the eigenvalues. Next, highest component is the direction with highest variance orthogonal to the previous components.
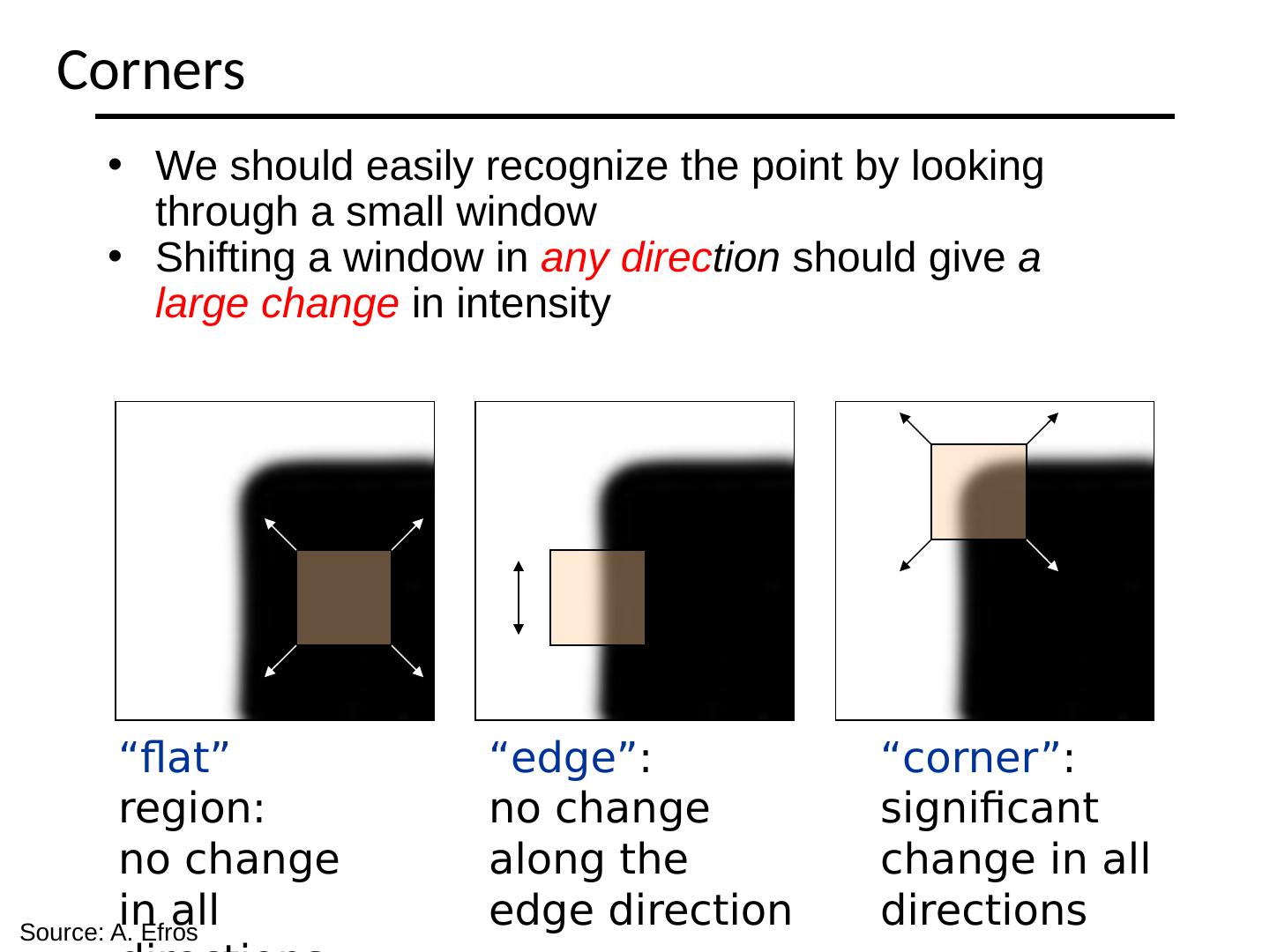
8 .Corners have … Both eigenvalues are large!
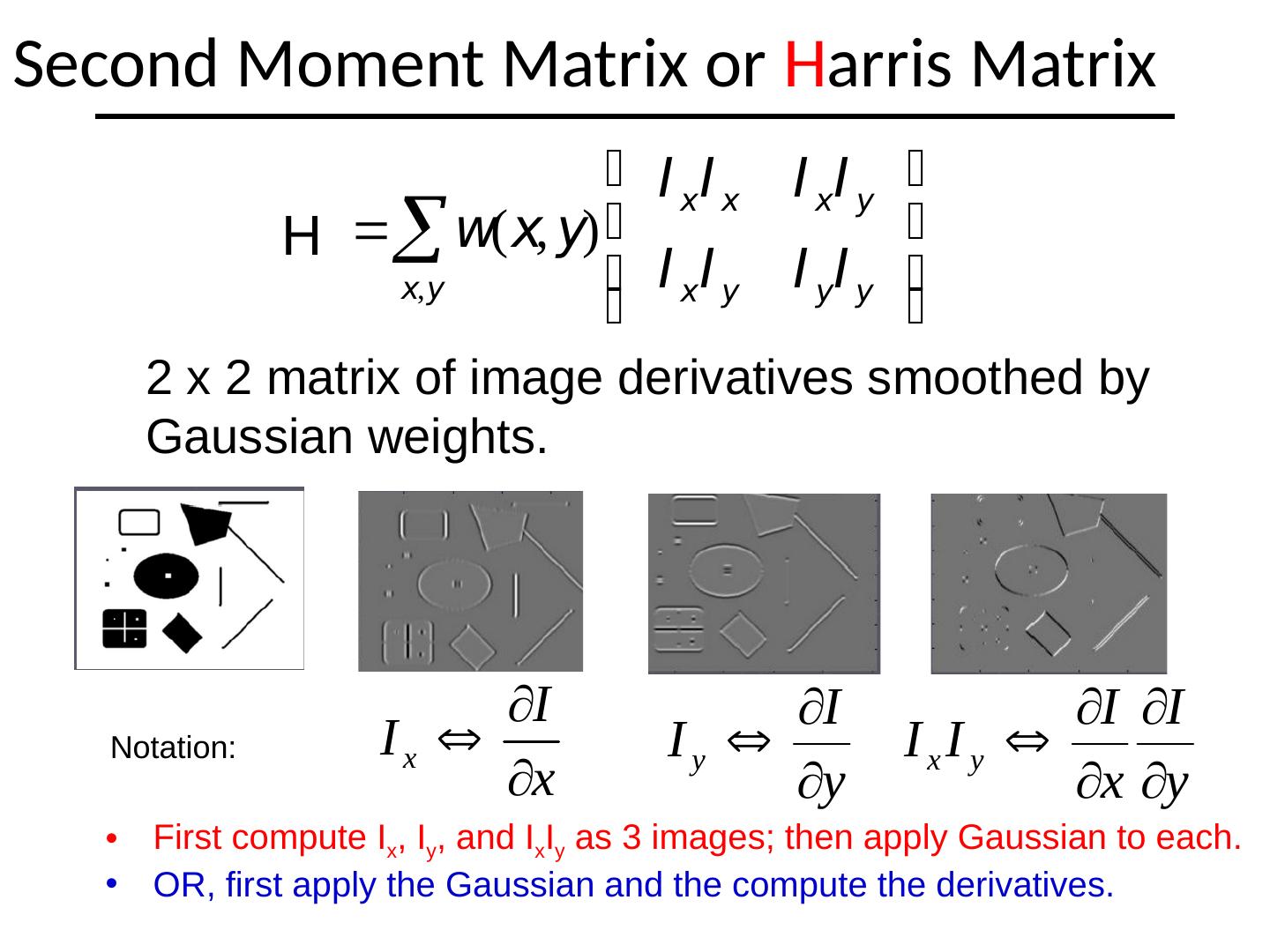
9 .Second Moment Matrix or H arris Matrix 2 x 2 matrix of image derivatives smoothed by Gaussian weights. Notation: First compute I x , I y , and I x I y as 3 images; then apply Gaussian to each . OR, first apply the Gaussian and the compute the derivatives. H
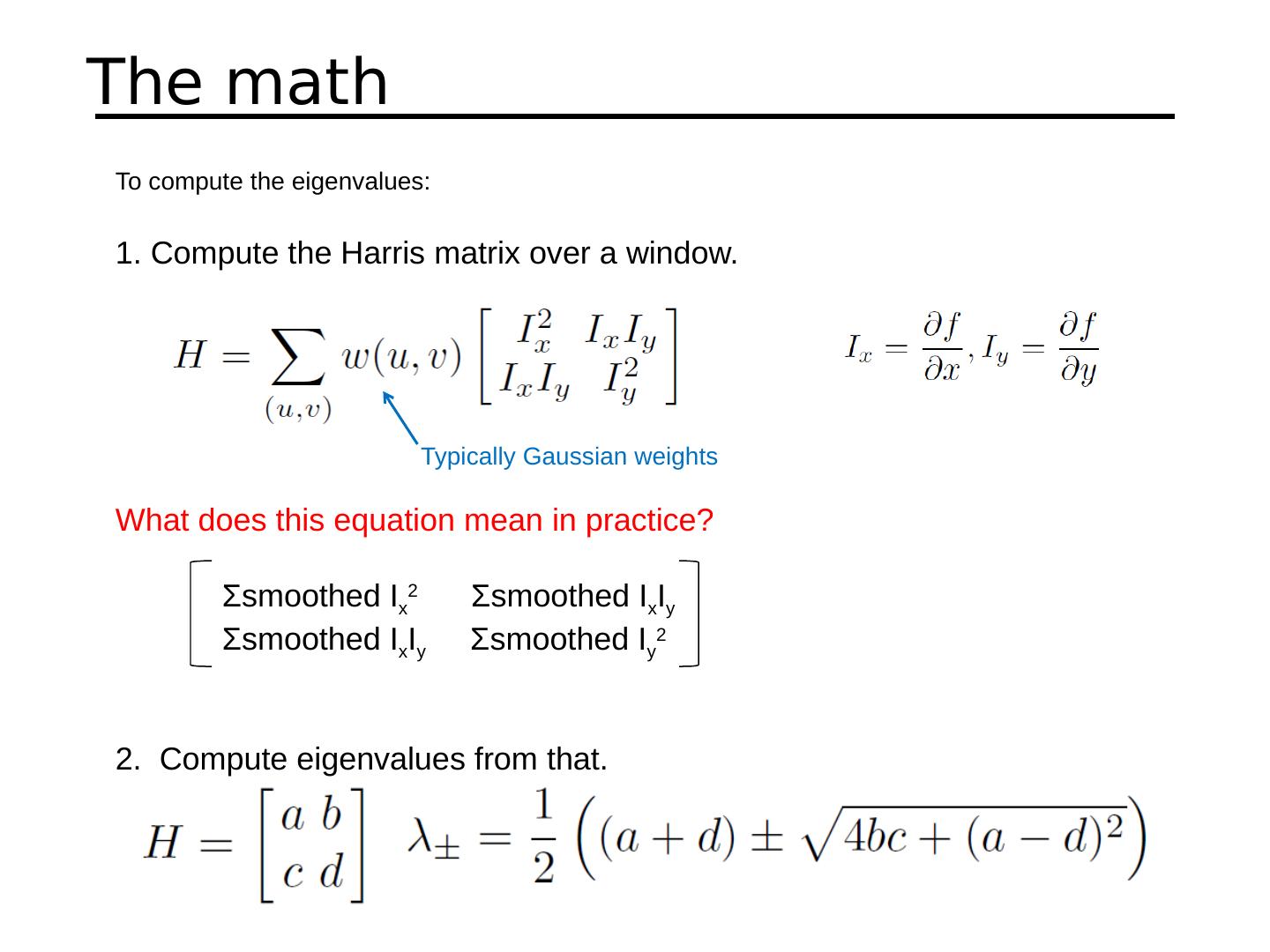
10 .The math To compute the eigenvalues: Compute the Harris matrix over a window. What does this equation mean in practice? Σ smoothed I x 2 Σ smoothed I x I y Σ smoothed I x I y Σ smoothed I y 2 2. Compute eigenvalues from that. Typically Gaussian weights
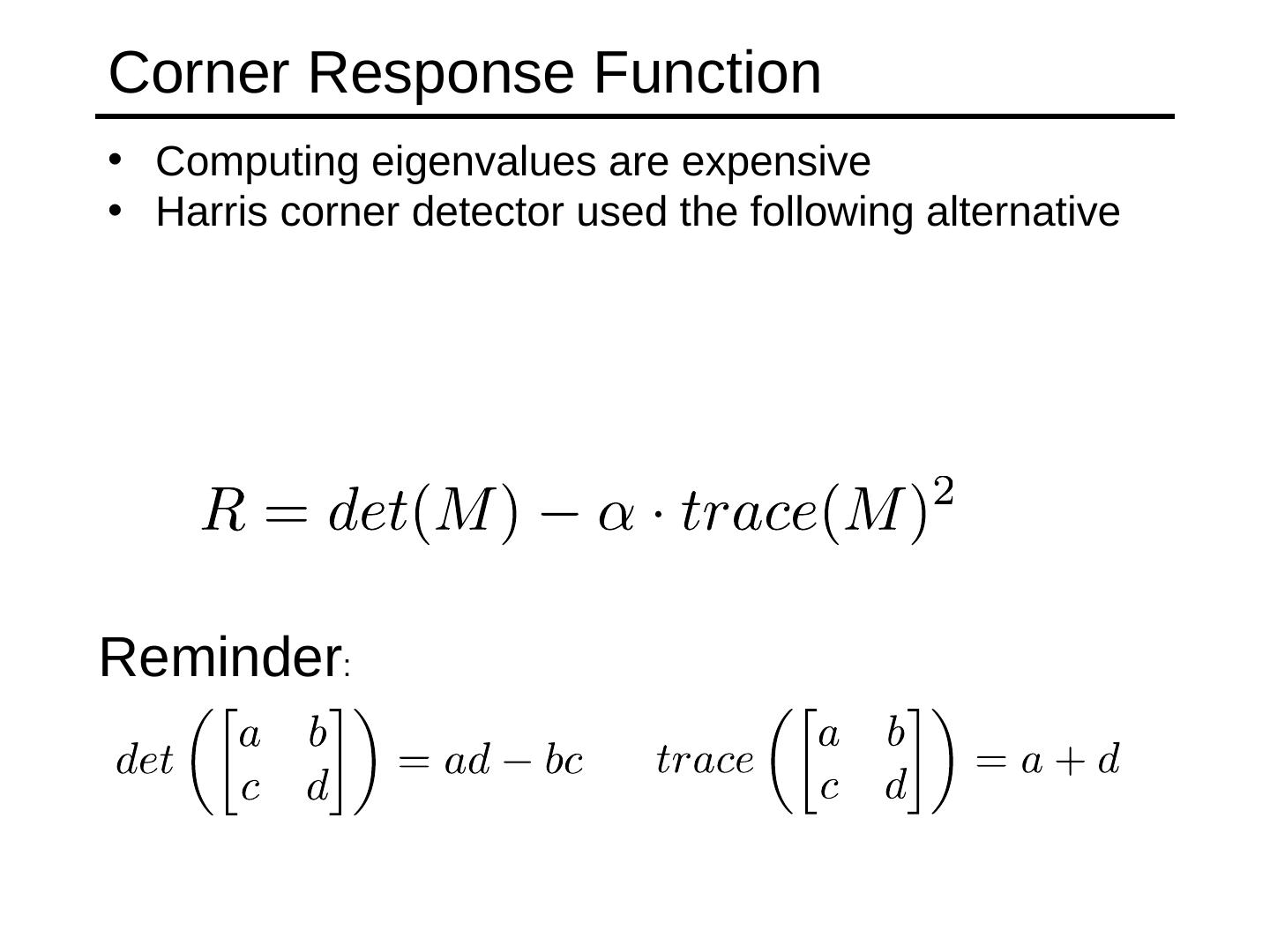
11 .Corner Response Function Computing eigenvalues are expensive Harris corner detector used the following alternative Reminder :
12 .Harris Detector: Steps
13 .Harris Detector: Steps Compute corner response R
14 .Harris Detector: Steps Find points with large corner response: R > threshold
15 .Harris Detector: Steps Take only the points of local maxima of R
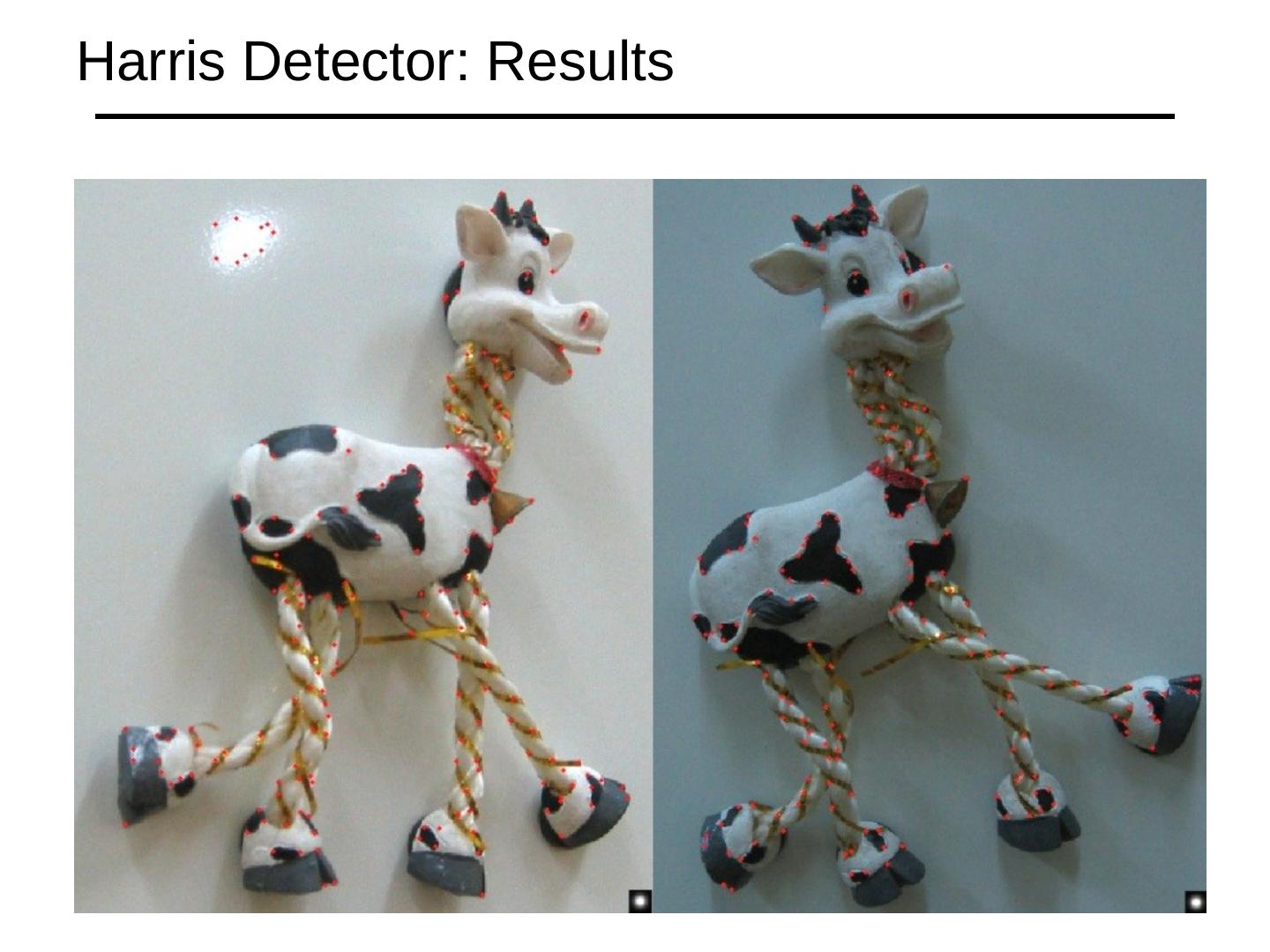
16 .Harris Detector: Results
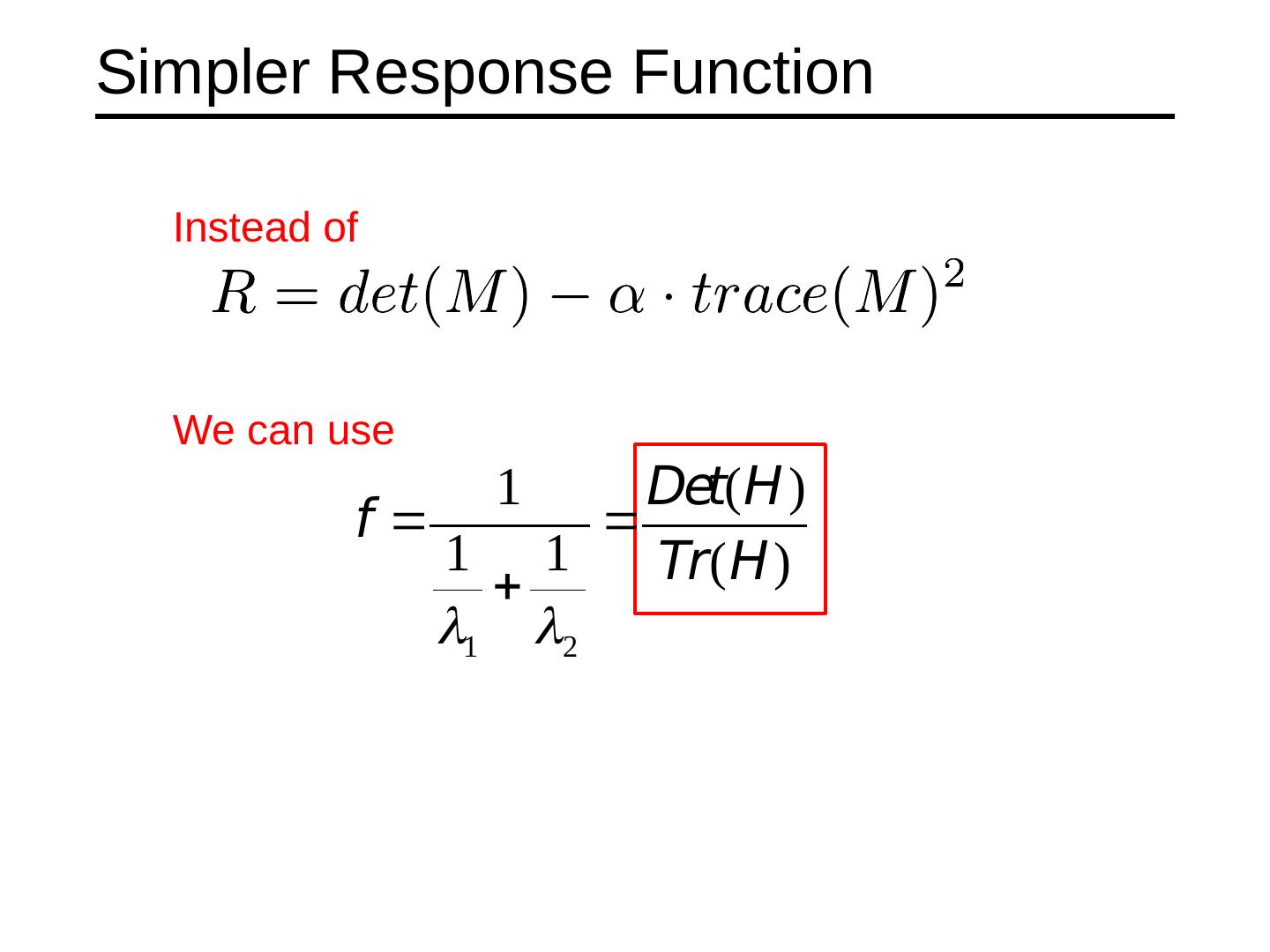
17 .Simpler Response Function Instead of We can use
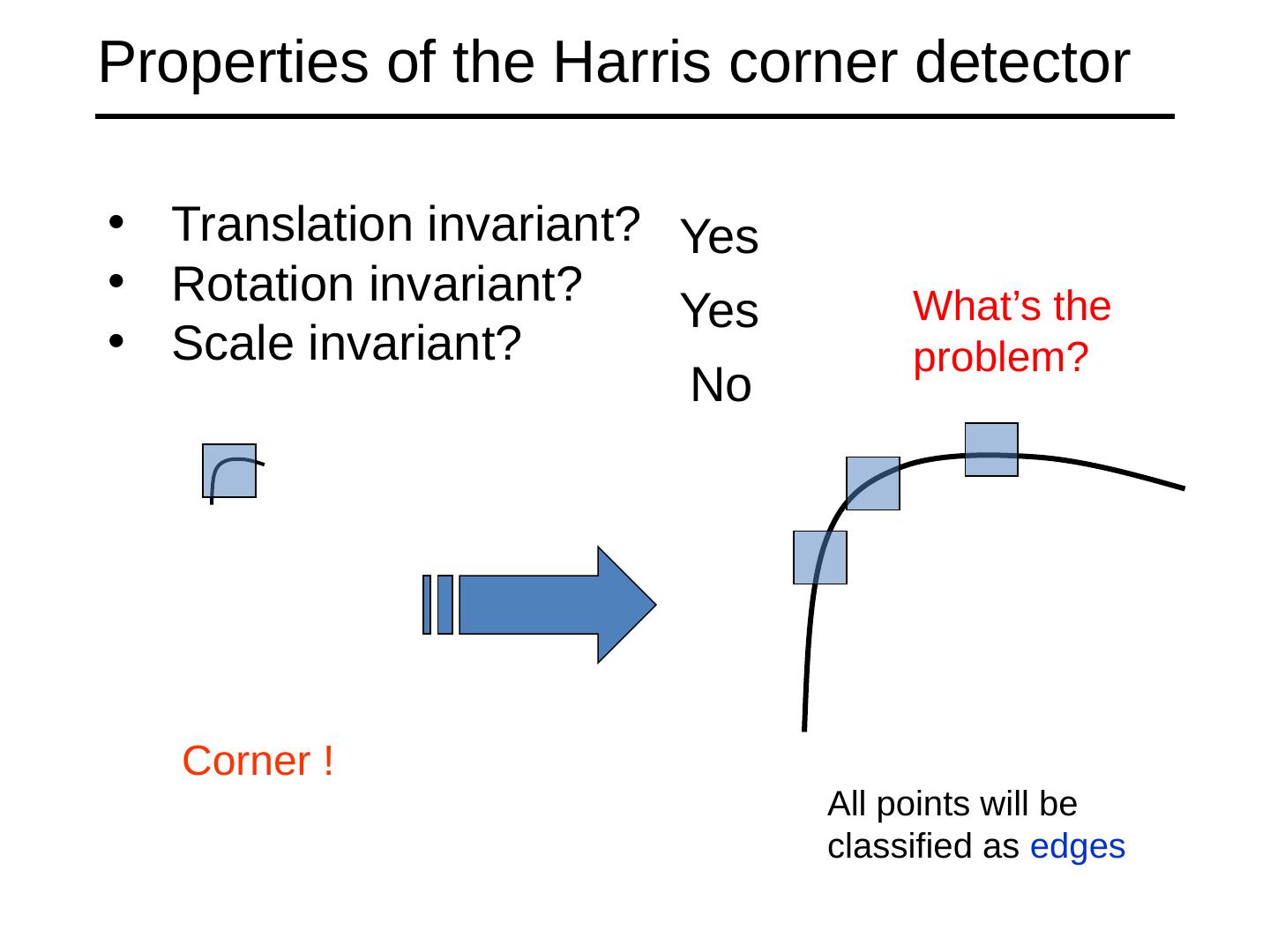
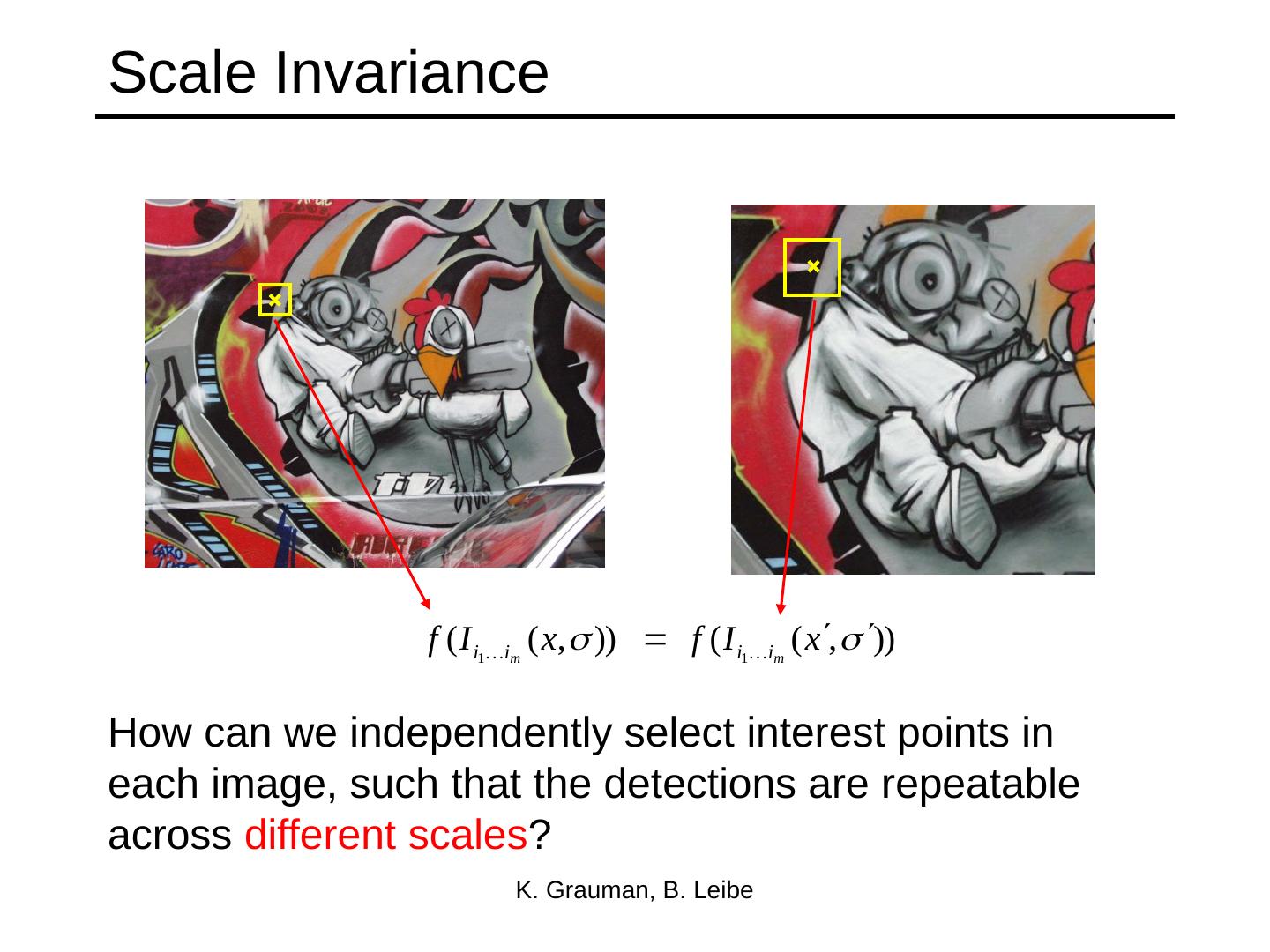
18 .Properties of the Harris corner detector Translation invariant? Rotation invariant? Scale invariant? All points will be classified as edges Corner ! Yes No Yes What’s the problem?
19 . What’s next? Once we have found the keypoints and a dominant orientation for each, we need to describe the (rotated and scaled) neighborhood about each. 128-dimensional vector
20 . Important Point People just say “SIFT”. But there are TWO parts to SIFT. an interest point detector a region descriptor They are independent. Many people use the region descriptor without looking for the points.