展开查看详情
1 .Image Stitching II Linda Shapiro EE/CSE 576
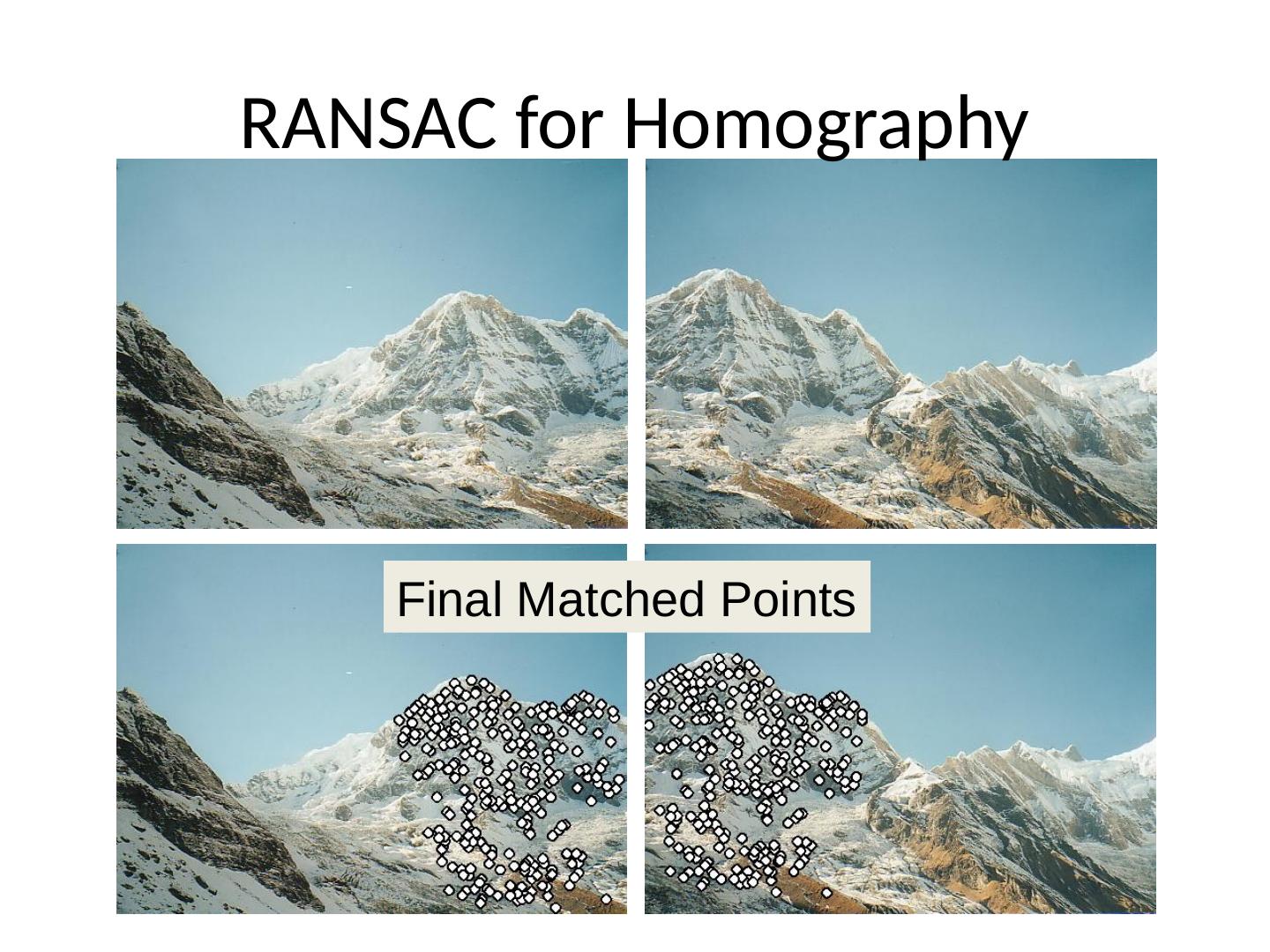
2 .RANSAC for Homography Initial Matched Points
3 .RANSAC for Homography Final Matched Points
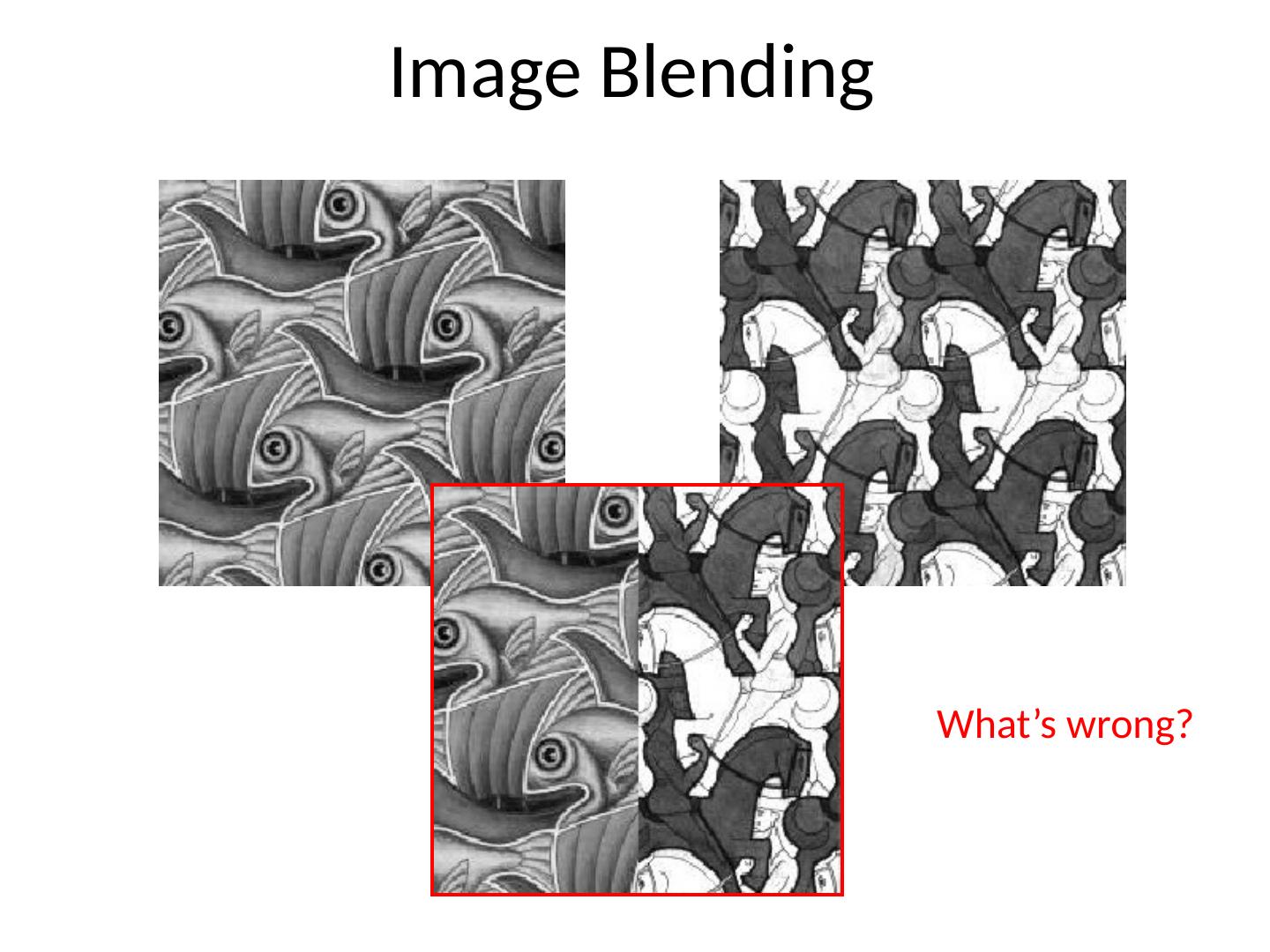
5 .Image Blending What’s wrong?
6 .Feathering 0 1 0 1 + = ramp
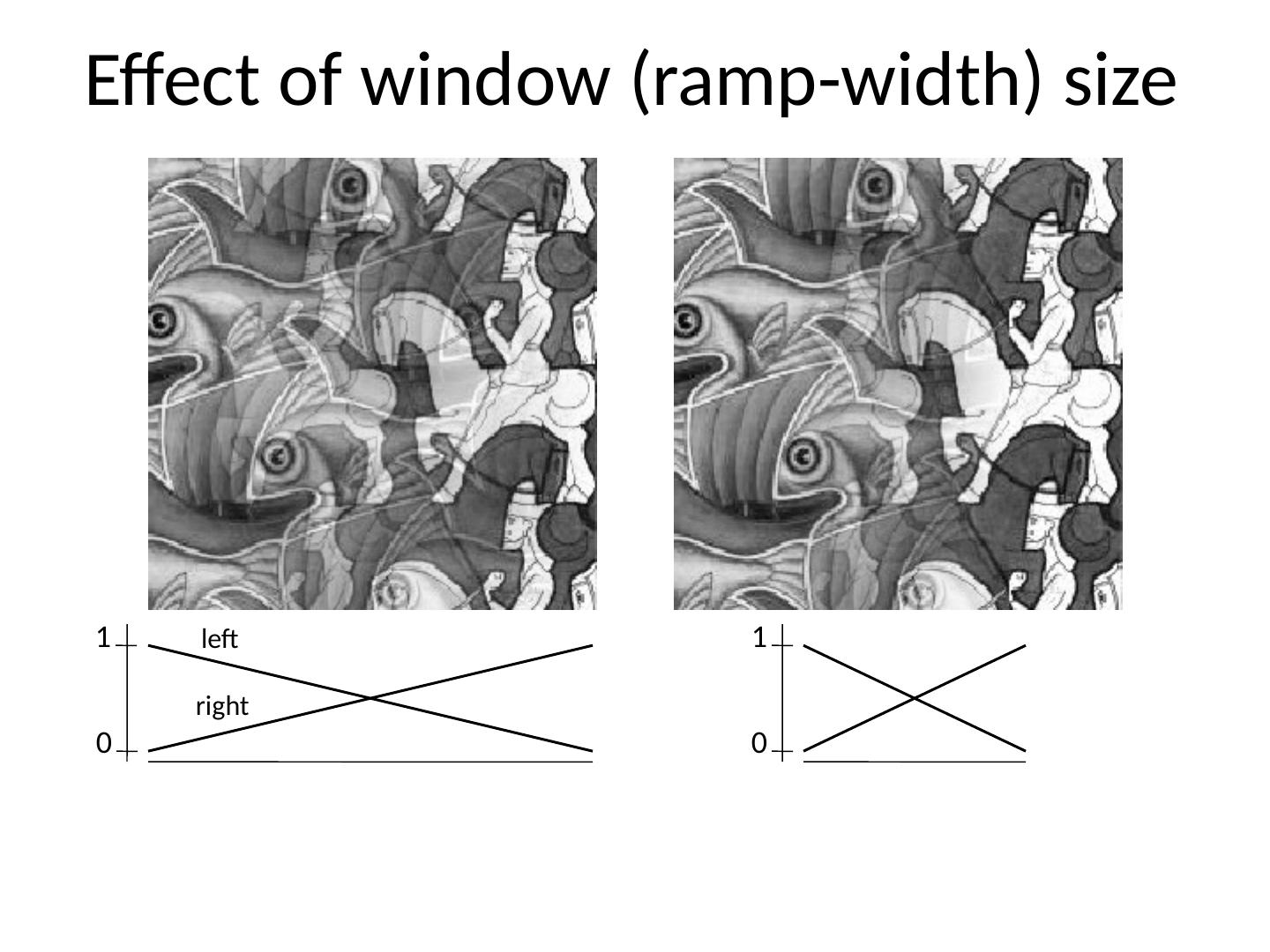
7 .Effect of window (ramp-width) size 0 1 left right 0 1
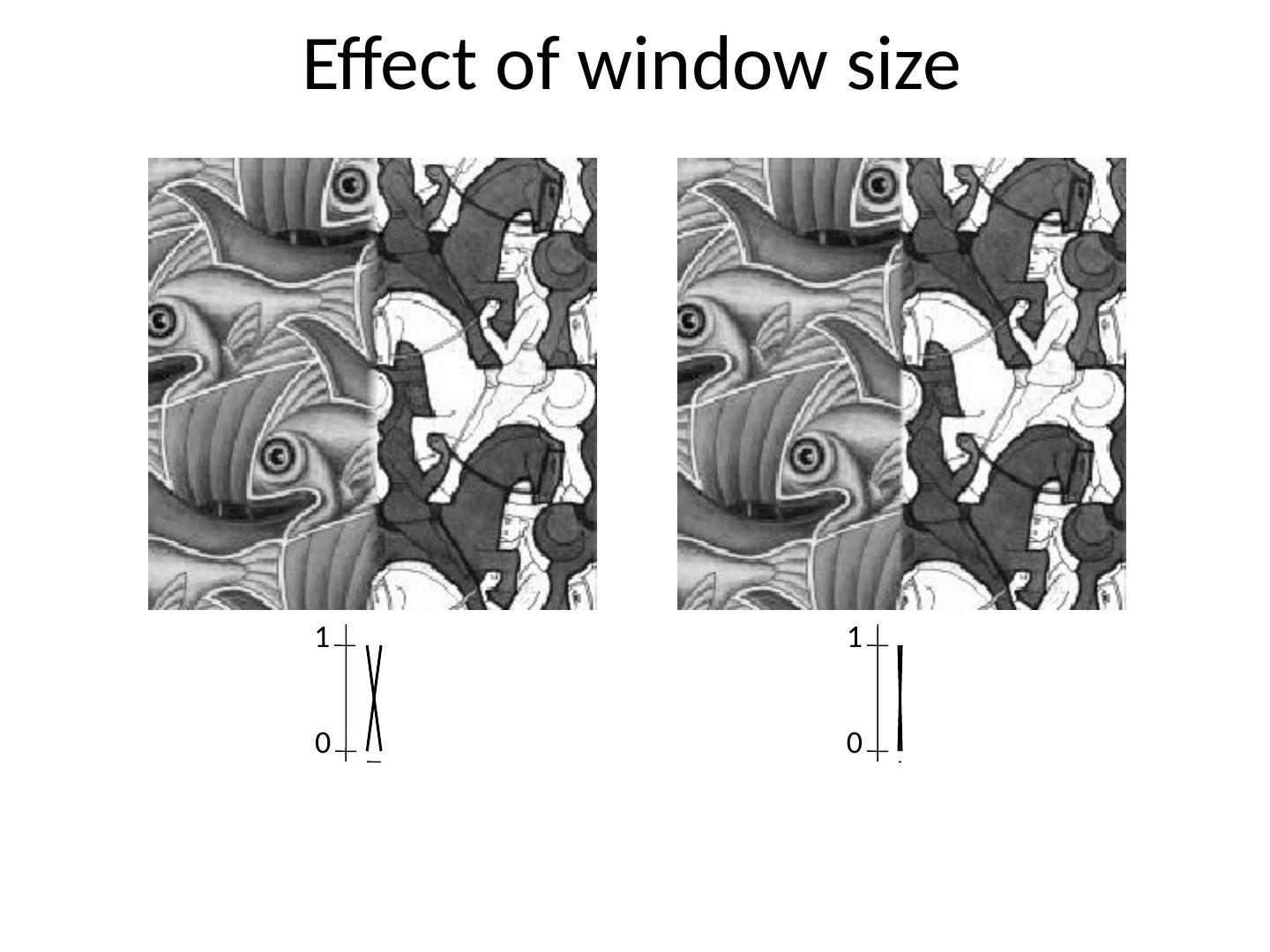
8 .Effect of window size 0 1 0 1
9 .Good window size 0 1 “ Optimal ” window: smooth but not ghosted Doesn ’ t always work... What can we do instead?
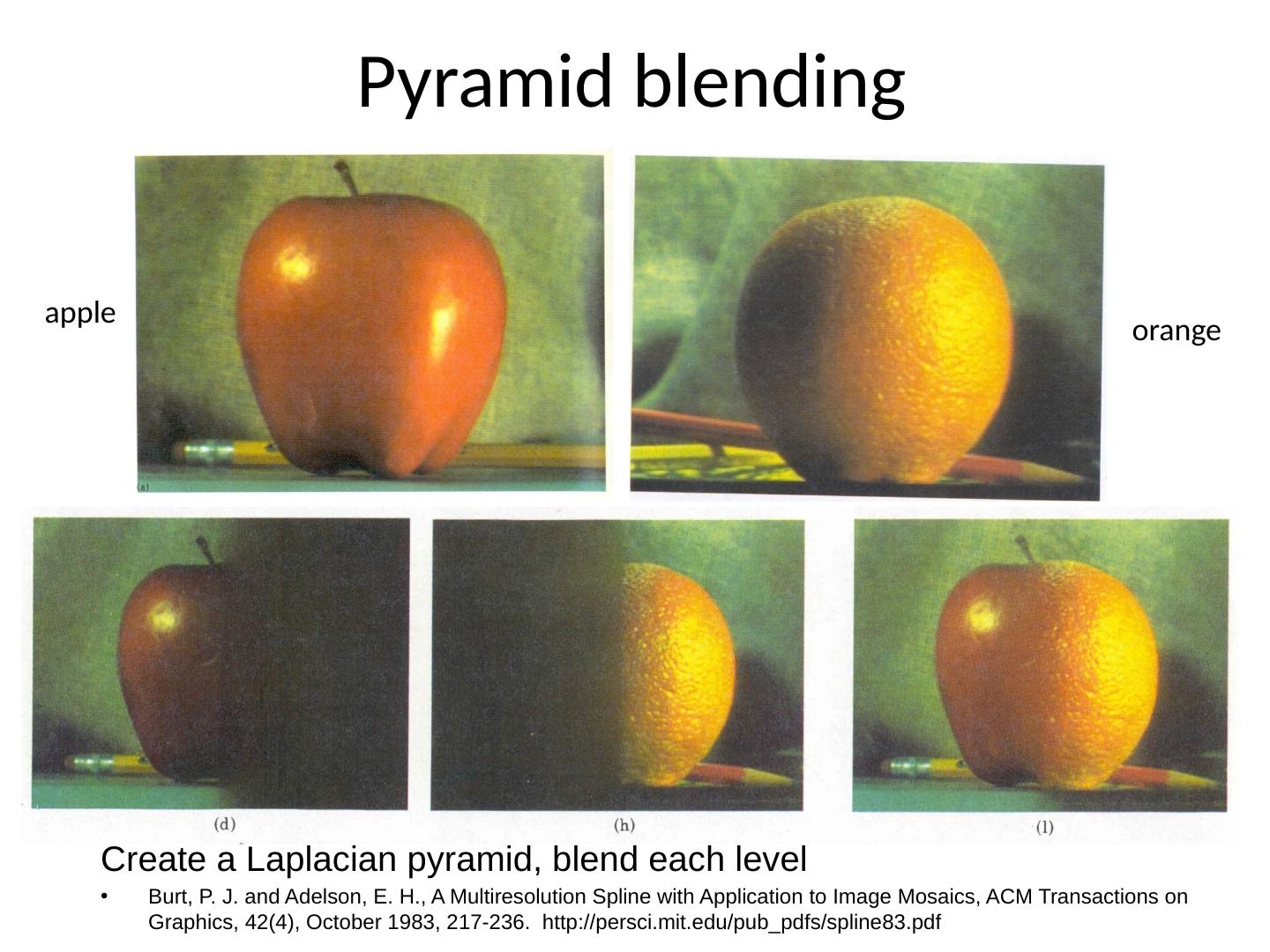
10 .Pyramid blending Create a Laplacian pyramid, blend each level Burt, P. J. and Adelson, E. H ., A Multiresolution Spline with Application to Image Mosaics, ACM Transactions on Graphics, 42(4), October 1983, 217-236. http ://persci.mit.edu/pub_pdfs/spline83.pdf apple orange
11 .Forming a Gaussian Pyramid Start with the original image G 0 Perform a local Gaussian weighted averaging function in a neighborhood about each pixel, sampling so that the result is a reduced image of half the size in each dimension. Do this all the way up the pyramid G l = REDUCE(G l-1 ) Each level l node will represent a weighted average of a subarray of level l.
12 .Making the Laplacians We want to subtract each level of the pyramid from the next lower one. But they are different sizes! In order to do the subtraction, we perform an interpolation process. We interpolate new samples between those of a given image to make it big enough to subtract. The operation is called EXPAND.
13 .Gaussian Pyramid Laplacian Pyramid The Laplacian Pyramid - = - = - =
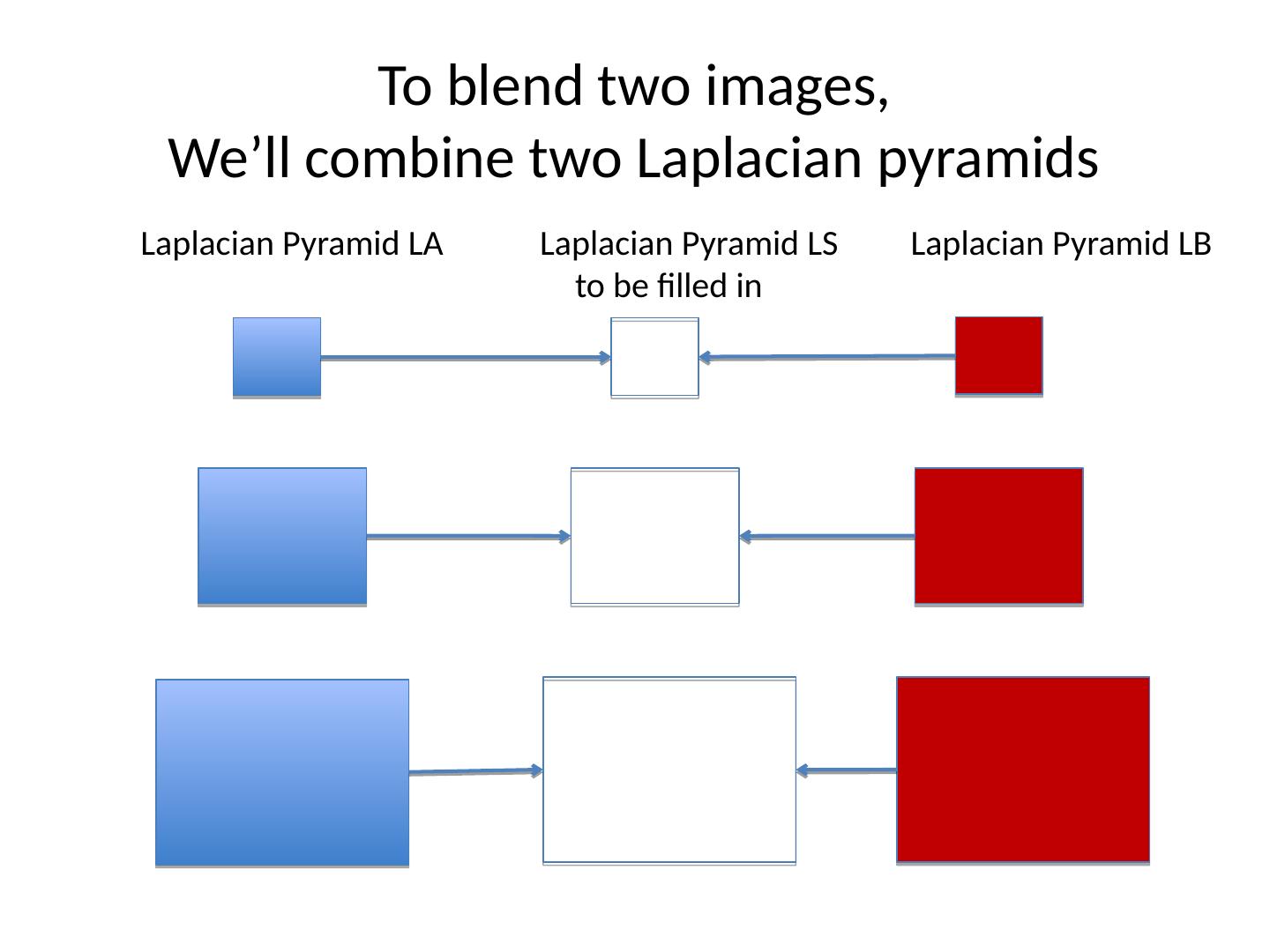
14 .To blend two images, We’ll combine two Laplacian pyramids Laplacian Pyramid LA Laplacian Pyramid LS Laplacian Pyramid LB to be filled in
15 .Forming the New Pyramid Laplacian pyramids LB and LB are constructed for images A and B, respectively. A third Laplacian pyramid LS is constructed by copying nodes from the left half of LA to the corresponding nodes of LS and nodes from the right half of LB to the right half of LS. Nodes along the center line are set equal to the average of corresponding LA and LB nodes
16 .Using the new Laplacian Pyramid Use the new Laplacian pyramid with the reverse of how it was created to create a Gaussian pyramid. The lowest level of the new Gaussian pyramid gives the final result.
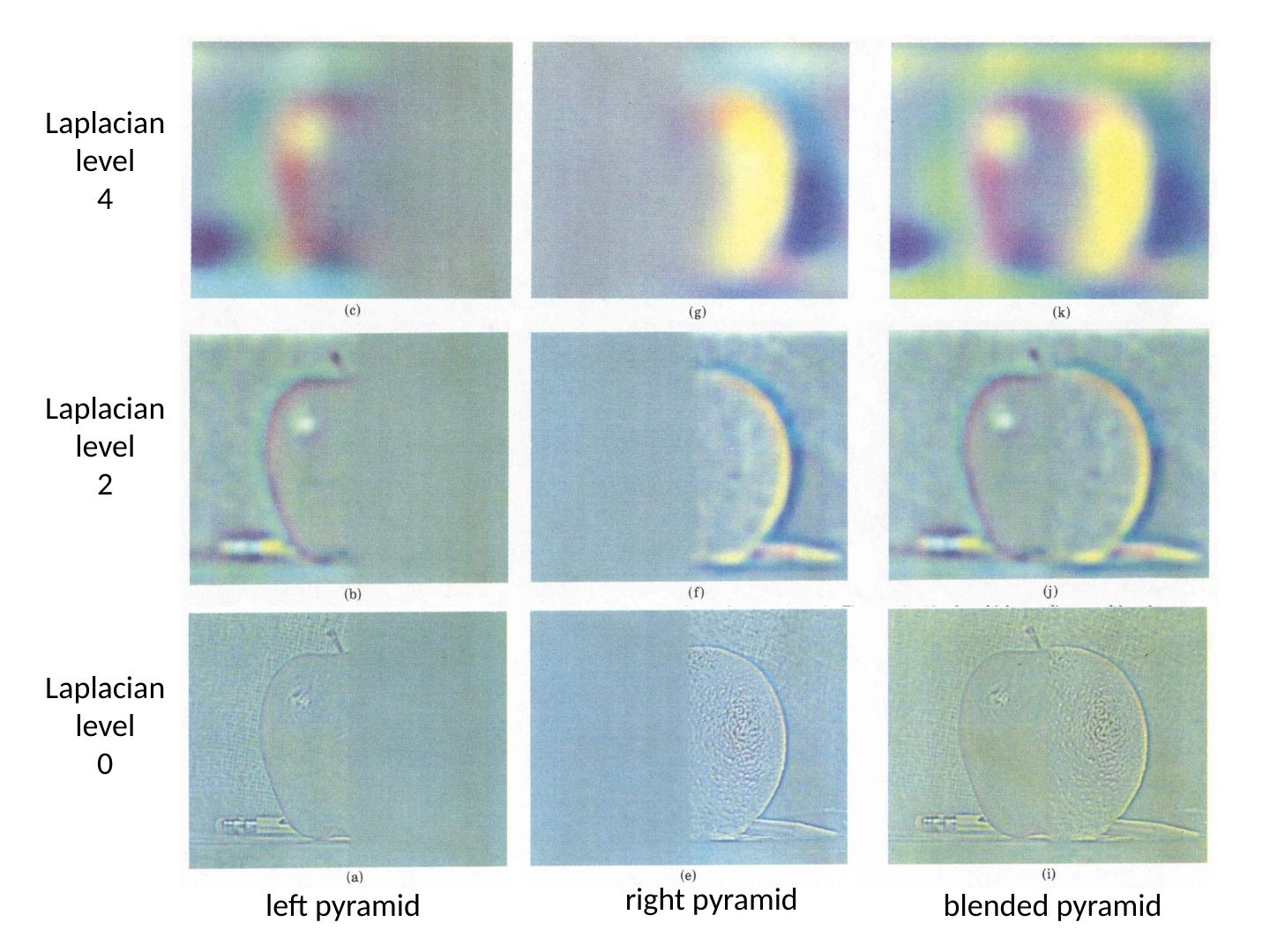
17 .Laplacian level 4 Laplacian level 2 Laplacian level 0 left pyramid right pyramid blended pyramid
18 .Laplacian level 4 Laplacian level 2 Laplacian level 0 left pyramid right pyramid blended pyramid
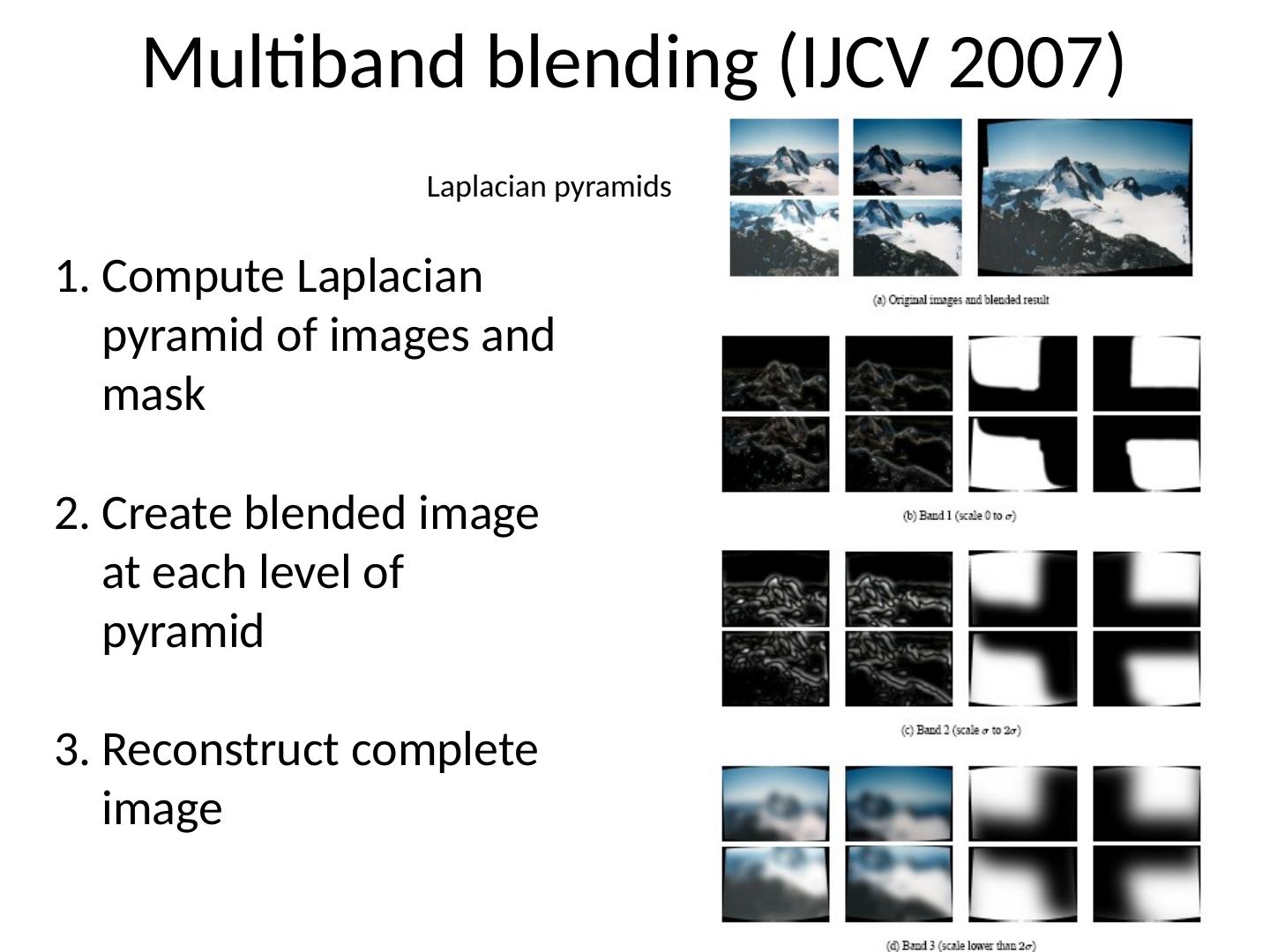
19 .Multiband blending (IJCV 2007) Compute Laplacian pyramid of images and mask Create blended image at each level of pyramid Reconstruct complete image Laplacian pyramids
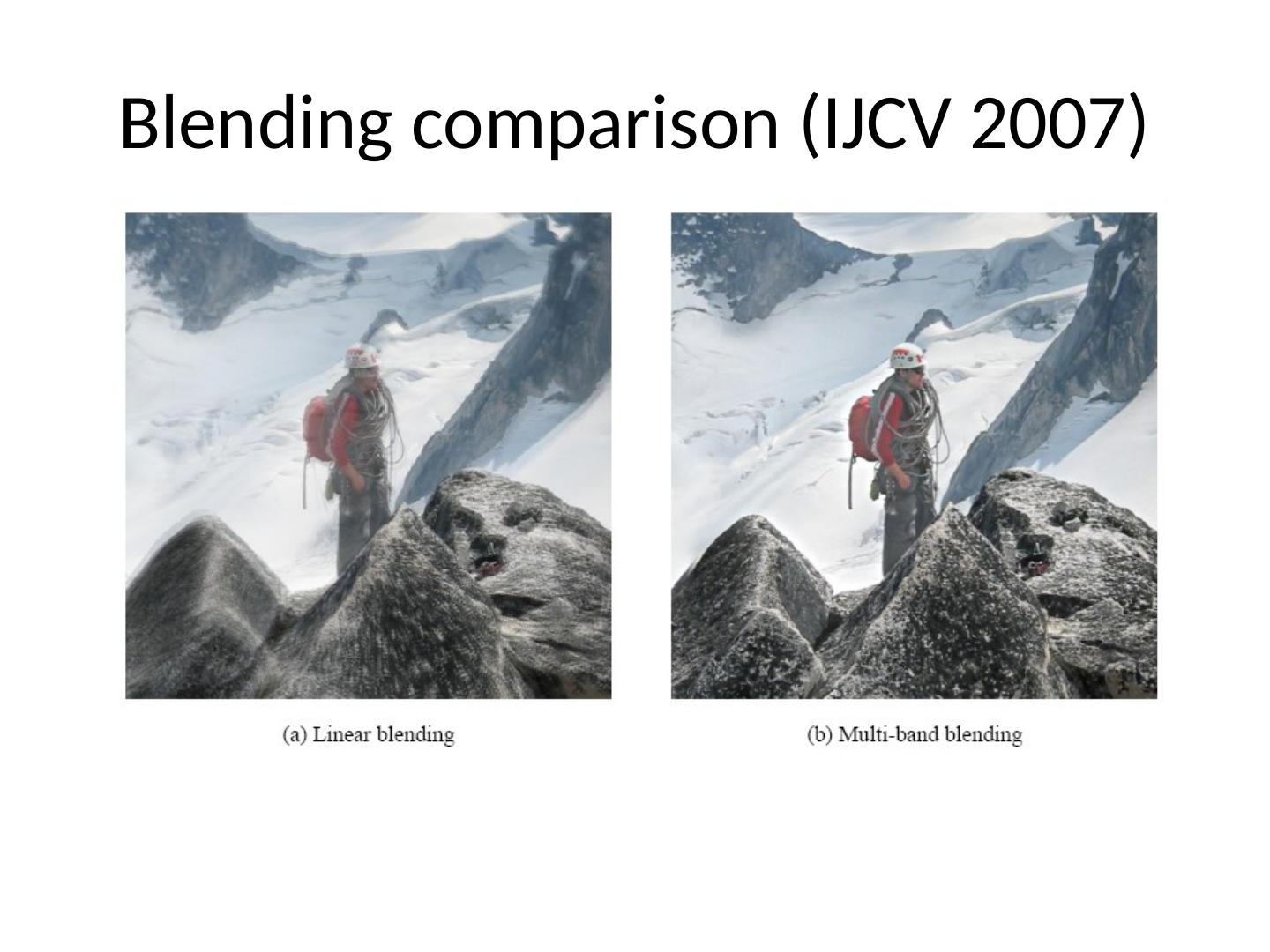
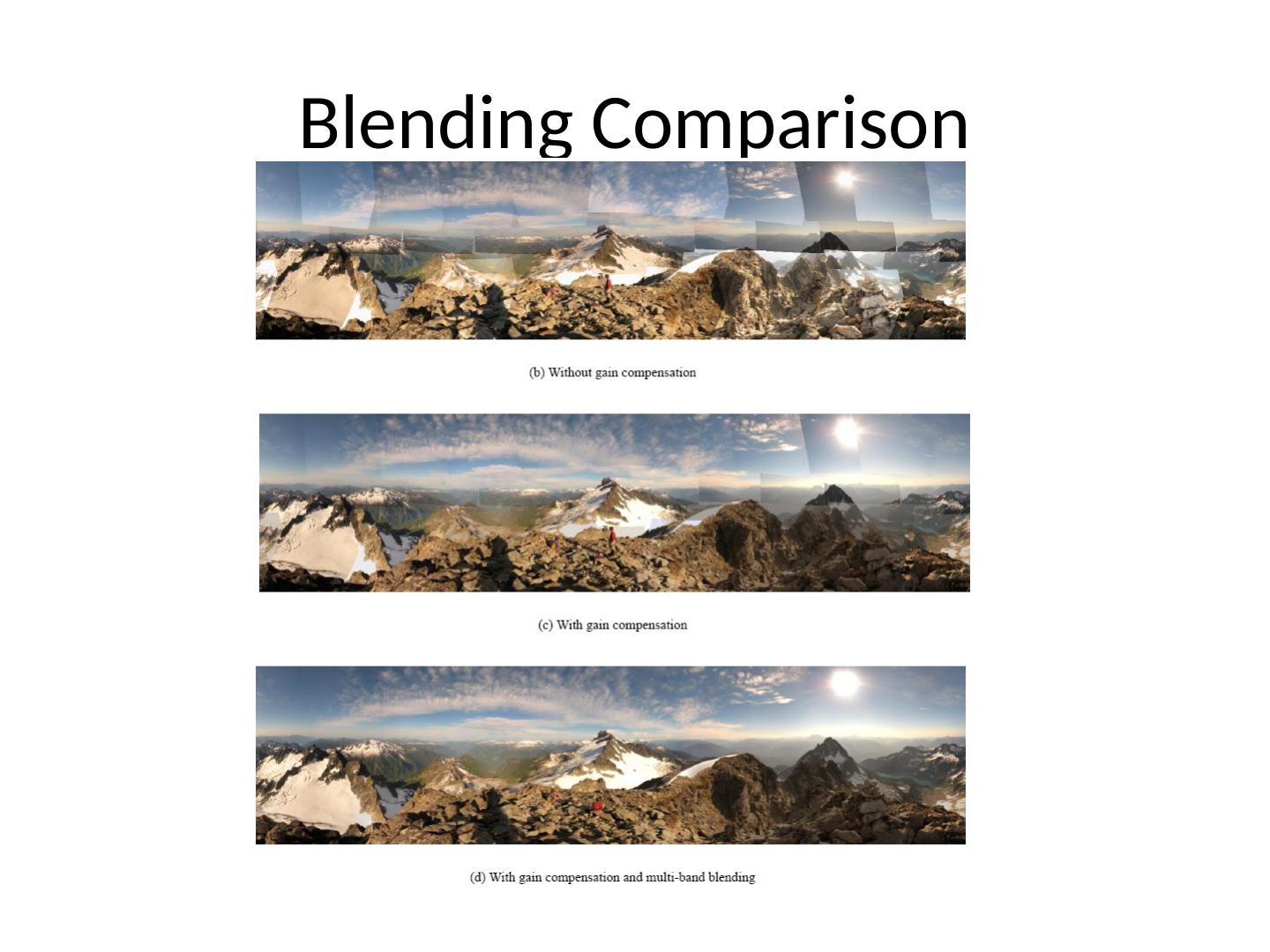
20 .Blending comparison (IJCV 2007)
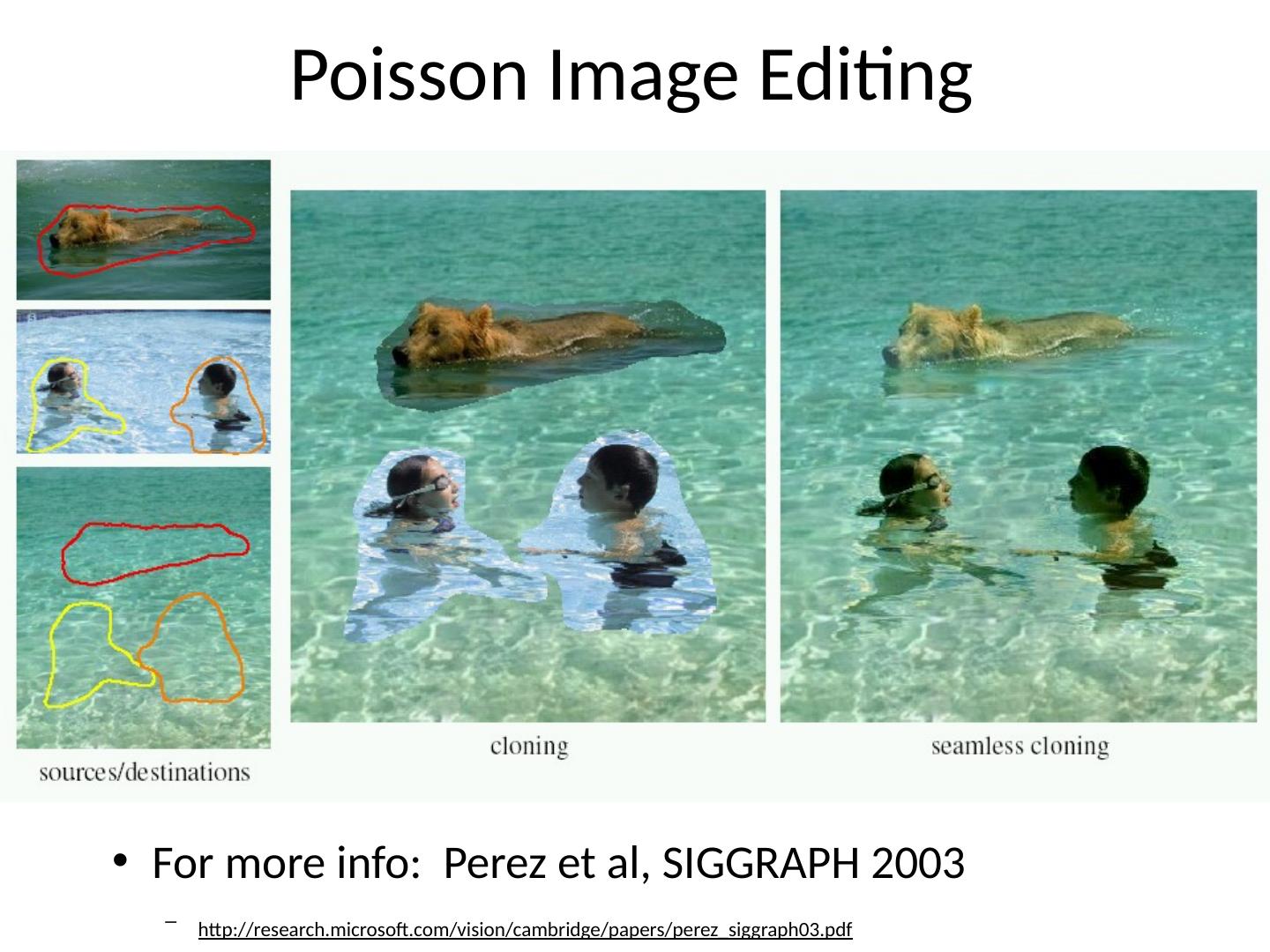
21 .Poisson Image Editing For more info: Perez et al, SIGGRAPH 2003 http://research.microsoft.com/vision/cambridge/papers/perez_siggraph03.pdf
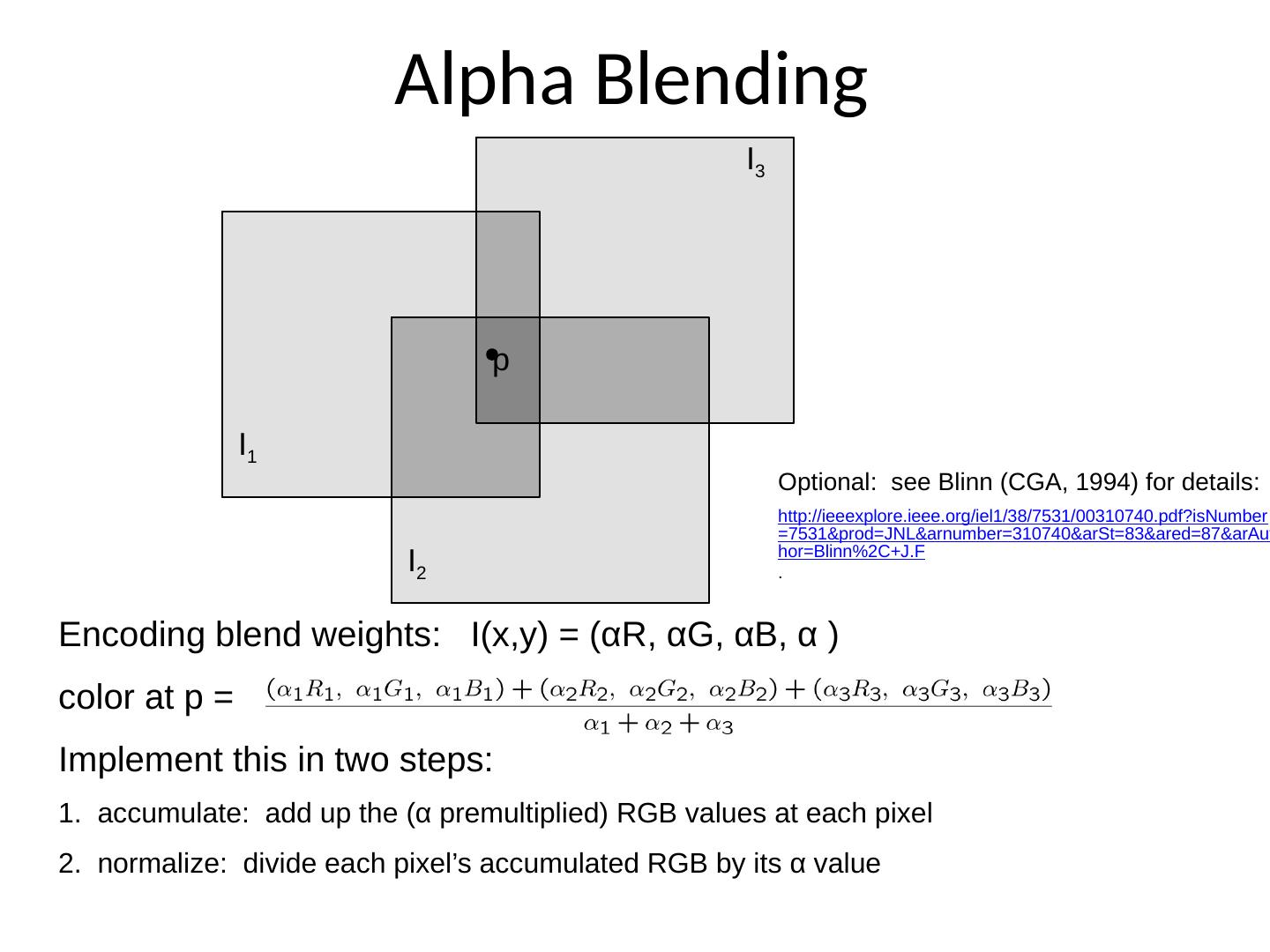
22 .Encoding blend weights: I( x,y ) = ( α R, α G , α B, α ) color at p = Implement this in two steps: 1. accumulate: add up the ( α premultiplied ) RGB values at each pixel 2. normalize: divide each pixel ’ s accumulated RGB by its α value Alpha Blending Optional: see Blinn (CGA, 1994) for details: http://ieeexplore.ieee.org/iel1/38/7531/00310740.pdf?isNumber=7531&prod=JNL&arnumber=310740&arSt=83&ared=87&arAuthor=Blinn%2C+J.F . I 1 I 2 I 3 p
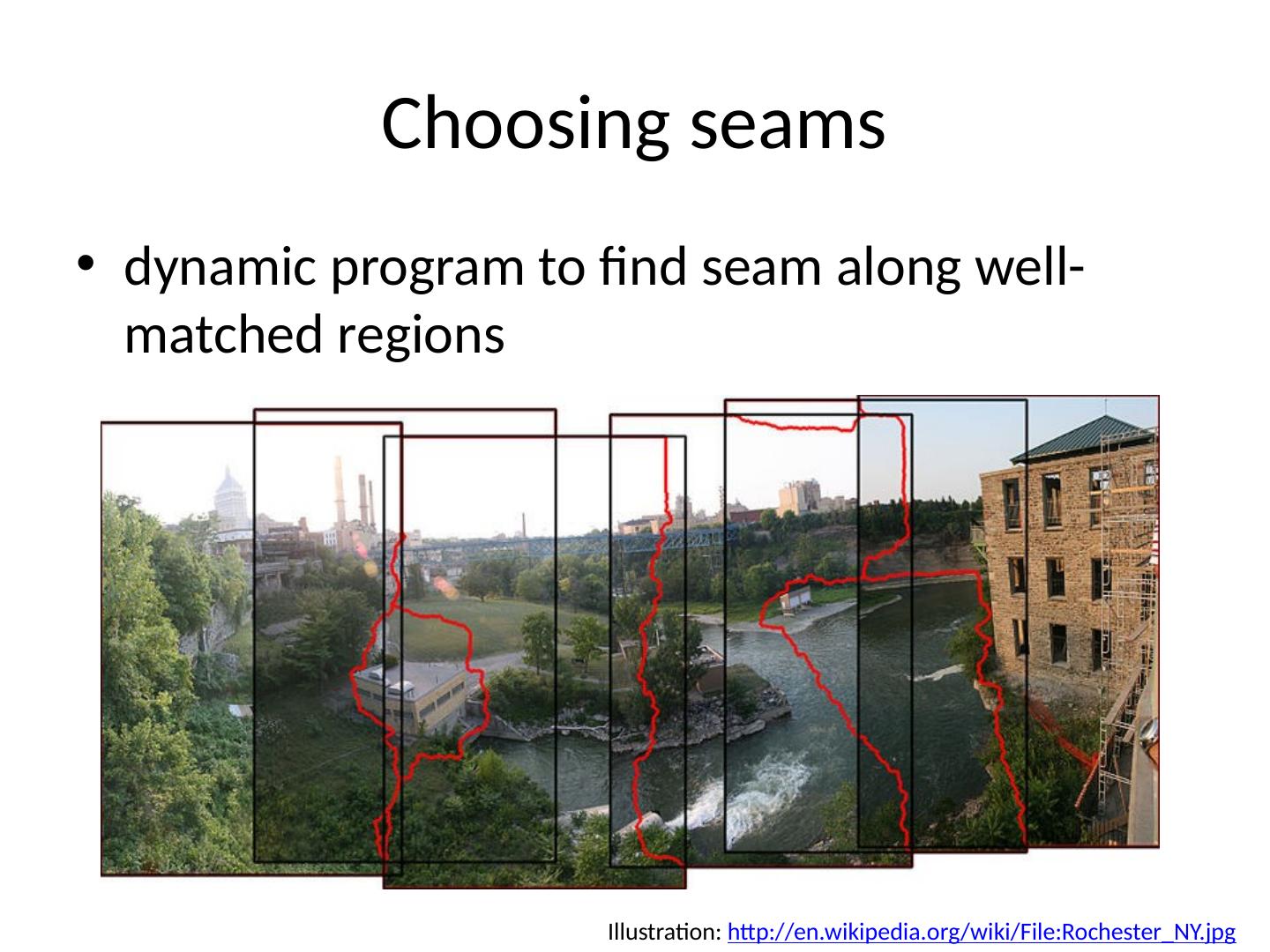
23 .Choosing seams dynamic program to find seam along well-matched regions Illustration: http://en.wikipedia.org/wiki/File:Rochester_NY.jpg
24 .Gain Compensation: Getting rid of artifacts Simple gain adjustment Compute average RGB intensity of each image in overlapping region Normalize intensities by ratio of averages
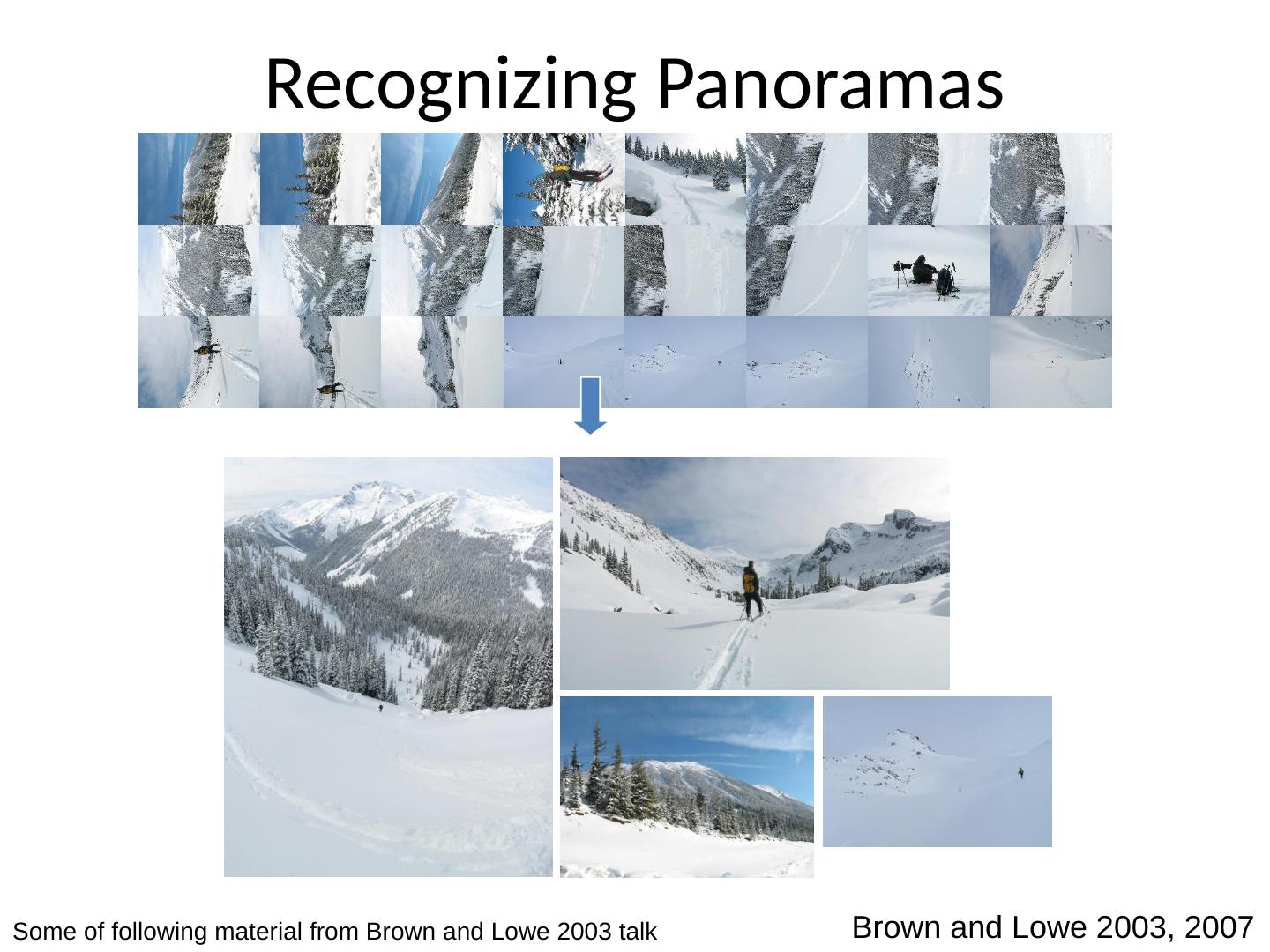
26 .Recognizing Panoramas Brown and Lowe 2003, 2007 Some of following material from Brown and Lowe 2003 talk
27 .Recognizing Panoramas Input: N images Extract SIFT points, descriptors from all images Find K-nearest neighbors for each point (K=4) For each image Select M candidate matching images by counting matched keypoints (m=6) Solve homography H ij for each matched image
28 .Recognizing Panoramas Input: N images Extract SIFT points, descriptors from all images Find K-nearest neighbors for each point (K=4) For each image Select M candidate matching images by counting matched keypoints (m=6) Solve homography H ij for each matched image Decide if match is valid ( n i > 8 + 0.3 n f ) # inliers # keypoints in overlapping area
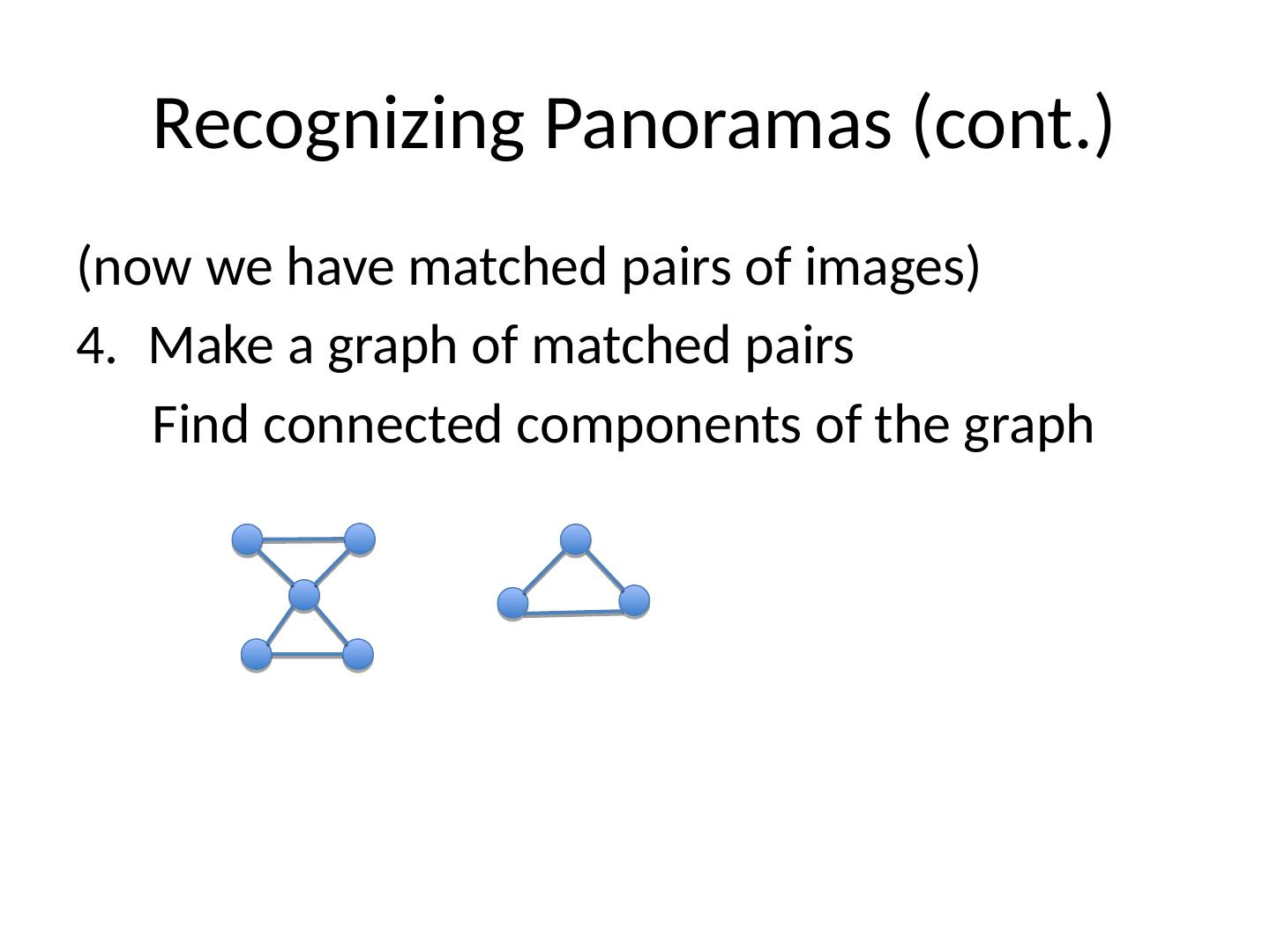
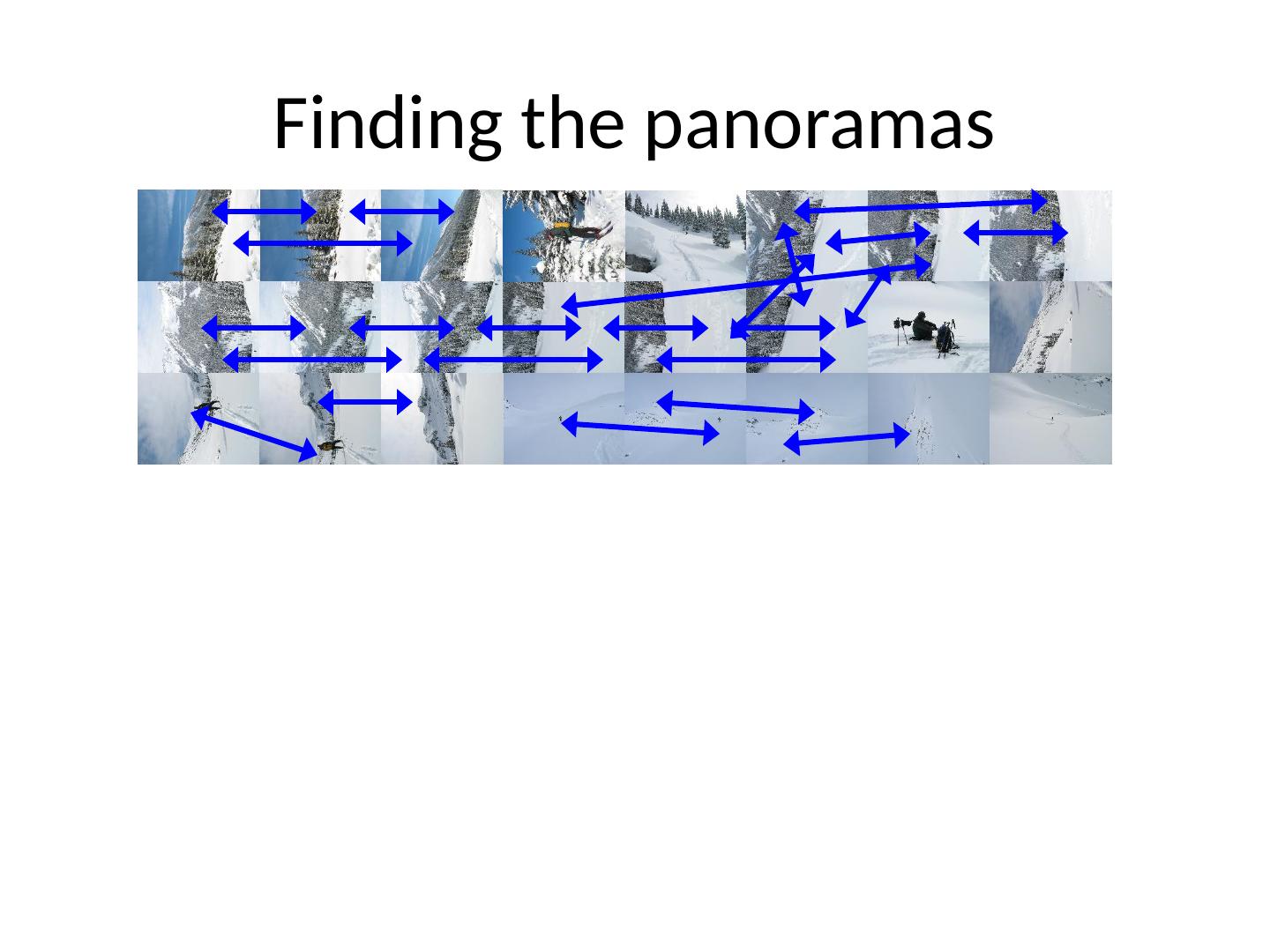
29 .Recognizing Panoramas (cont.) (now we have matched pairs of images) Make a graph of matched pairs Find connected components of the graph