




- 快召唤伙伴们来围观吧
- 微博 QQ QQ空间 贴吧
- 文档嵌入链接
- 复制
- 微信扫一扫分享
- 已成功复制到剪贴板
08Data Structures---Positional List
The course is mainly covered Positional List.Generally covered Mutators,Priority Queue ADT,Implementing a Priority Queue,Binary Heap,Priority queue operations with a binary heap,Time complexity,Other operations on a Binary Heap and so on.
展开查看详情
1 .Positional List The Concept The list is a generalization of both stacks and queues. But we are very restricted as to where these insertions and deletions may occur. Generally, two positions are recognized: front and rear. If a list has at least one node, the front is the position occupied by this node; if a list is empty, the front coincides with the rear. front rear cursor front rear cursor For flexibility, both access and mutation should happen anywhere in the list. For this, we need the concept of a current position or a cursor, which defines a viewing point or a viewing window. It is the place where the activities are directed. A positional list allows this. The use of such an ADT
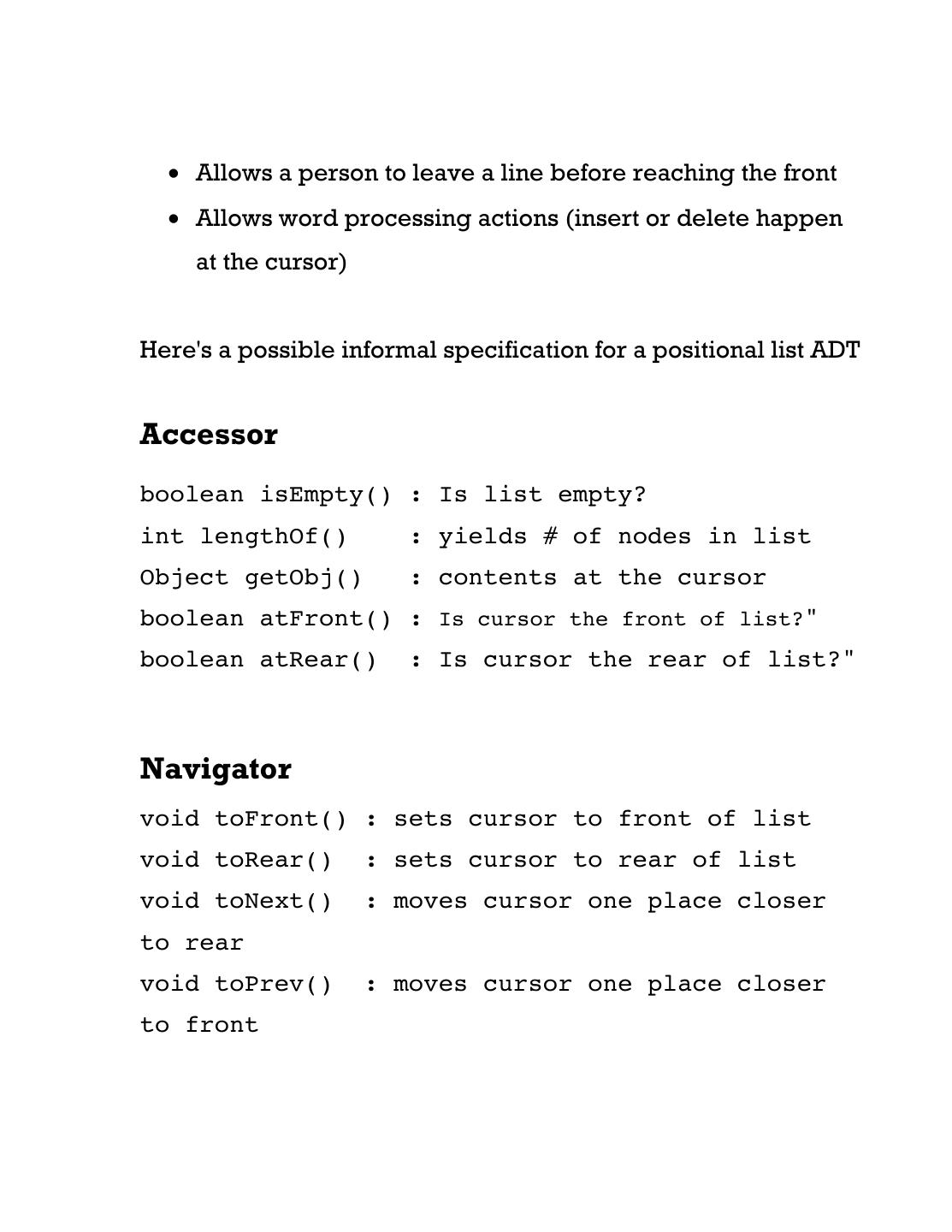
2 . • Allows a person to leave a line before reaching the front • Allows word processing actions (insert or delete happen at the cursor) Here's a possible informal specification for a positional list ADT Accessor boolean isEmpty() : Is list empty? int lengthOf() : yields # of nodes in list Object getObj() : contents at the cursor boolean atFront() : Is cursor the front of list?" boolean atRear() : Is cursor the rear of list?" Navigator void toFront() : sets cursor to front of list void toRear() : sets cursor to rear of list void toNext() : moves cursor one place closer to rear void toPrev() : moves cursor one place closer to front
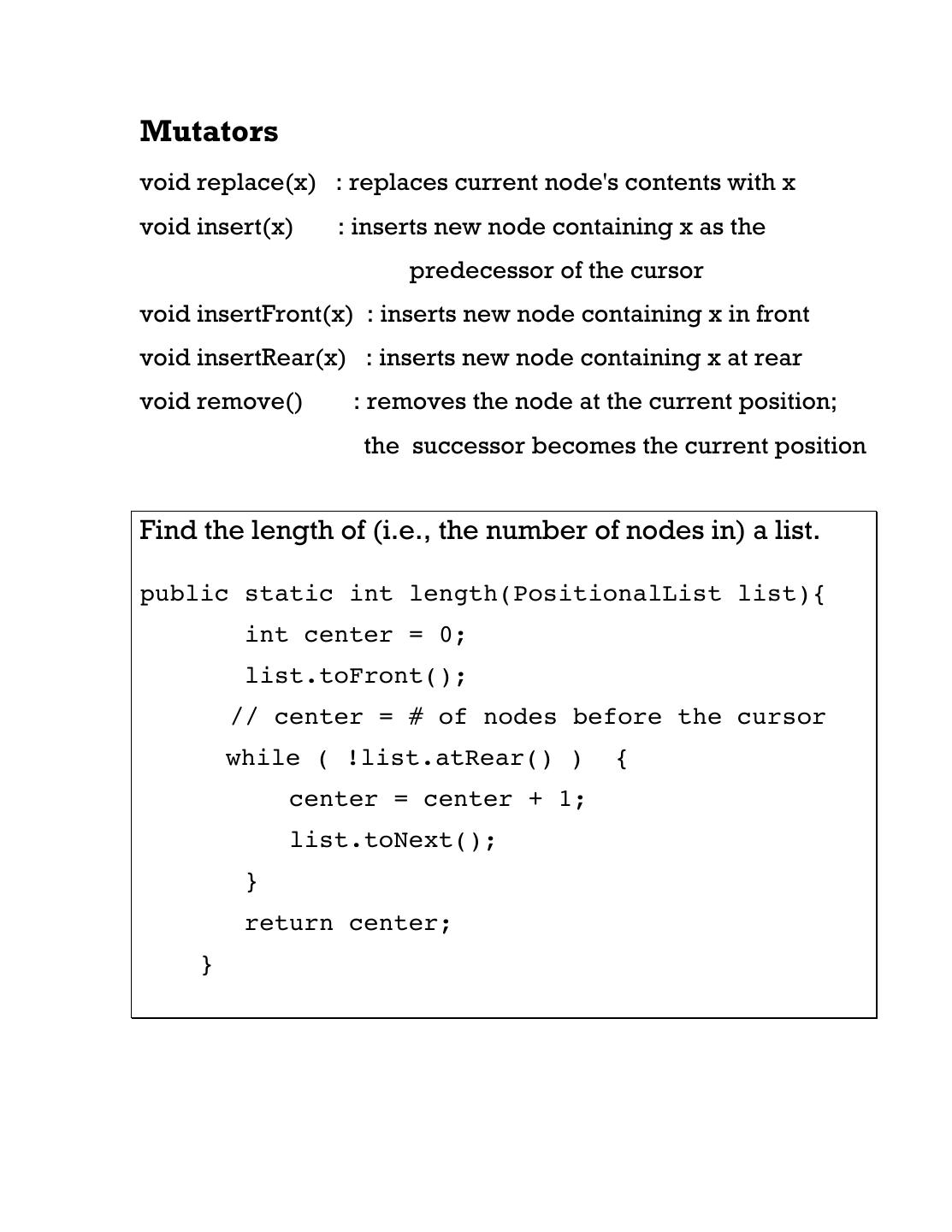
3 .Mutators void replace(x) : replaces current node's contents with x void insert(x) : inserts new node containing x as the predecessor of the cursor void insertFront(x) : inserts new node containing x in front void insertRear(x) : inserts new node containing x at rear void remove() : removes the node at the current position; the successor becomes the current position Find the length of (i.e., the number of nodes in) a list. public static int length(PositionalList list){ int center = 0; list.toFront(); // center = # of nodes before the cursor while ( !list.atRear() ) { center = center + 1; list.toNext(); } return center; }
4 .Priority Queue ADT A regular queue is a FIFO object, but there are many real-life applications, where the FIFO is not adequate. Here are some examples. • Air-traffic control • Standby passenger queue for a flight • Waiting list for a course at UI In such cases, a priority queue is relevant. Each element (v) has a key (k) that defines its priority. Lower key means higher priority. So the object with the minimum key will be dequeued first. Each entry is a key-value pair.
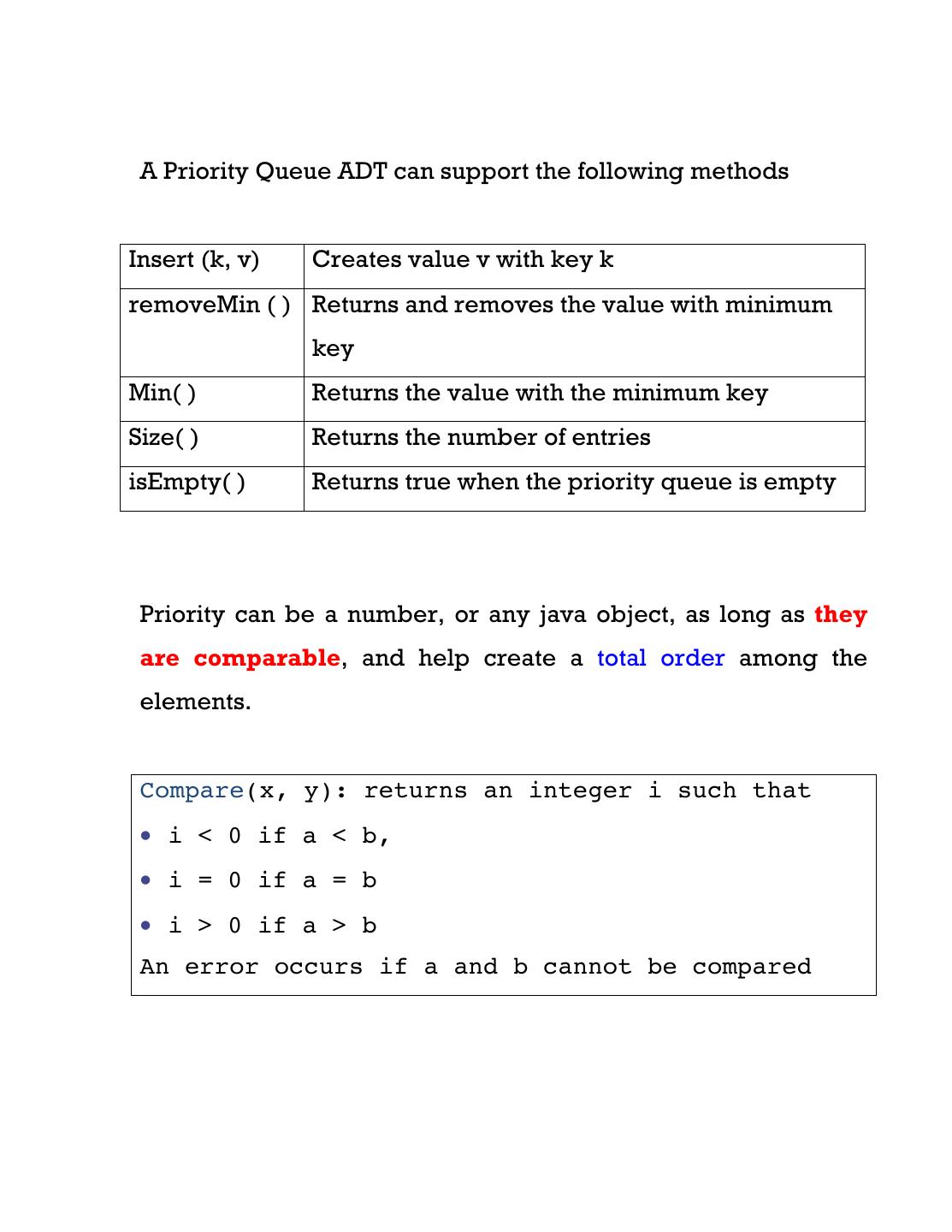
5 . A Priority Queue ADT can support the following methods Insert (k, v) Creates value v with key k removeMin ( ) Returns and removes the value with minimum key Min( ) Returns the value with the minimum key Size( ) Returns the number of entries isEmpty( ) Returns true when the priority queue is empty Priority can be a number, or any java object, as long as they are comparable, and help create a total order among the elements. Compare(x, y): returns an integer i such that • i < 0 if a < b, • i = 0 if a = b • i > 0 if a > b An error occurs if a and b cannot be compared
6 .If the ordering is not natural, then a comparator is provided at the queue construction time. Note that the notion of priority may vary from one user to another. For example, if there are two stocks P and Q to buy, one Alice may P to be more important than Q, but Bob may think differently. One common use of a priority queue is the “event queue” in a simulation. Here Key = time of the event Value = Description of the event
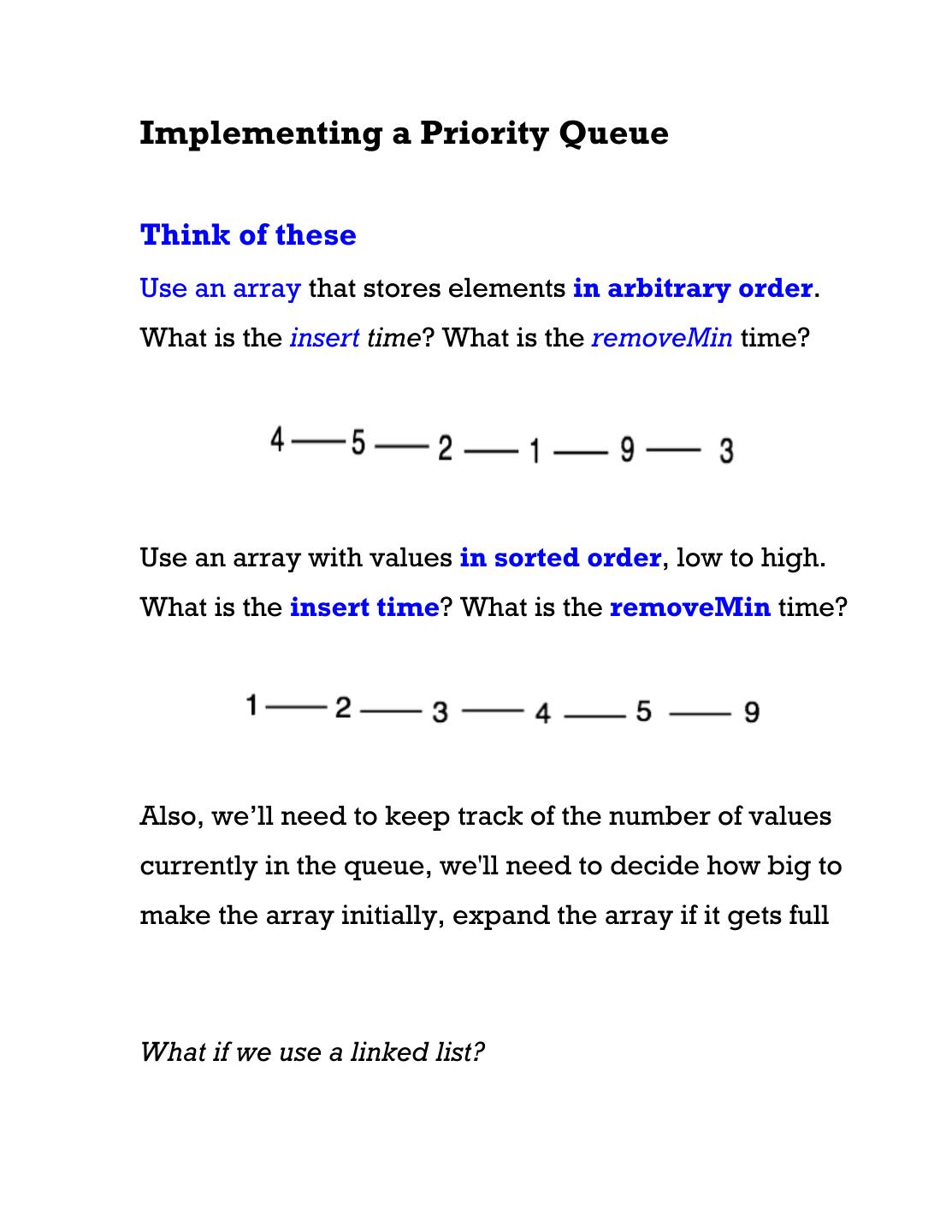
7 .Implementing a Priority Queue Think of these Use an array that stores elements in arbitrary order. What is the insert time? What is the removeMin time? Use an array with values in sorted order, low to high. What is the insert time? What is the removeMin time? Also, we’ll need to keep track of the number of values currently in the queue, we'll need to decide how big to make the array initially, expand the array if it gets full What if we use a linked list?
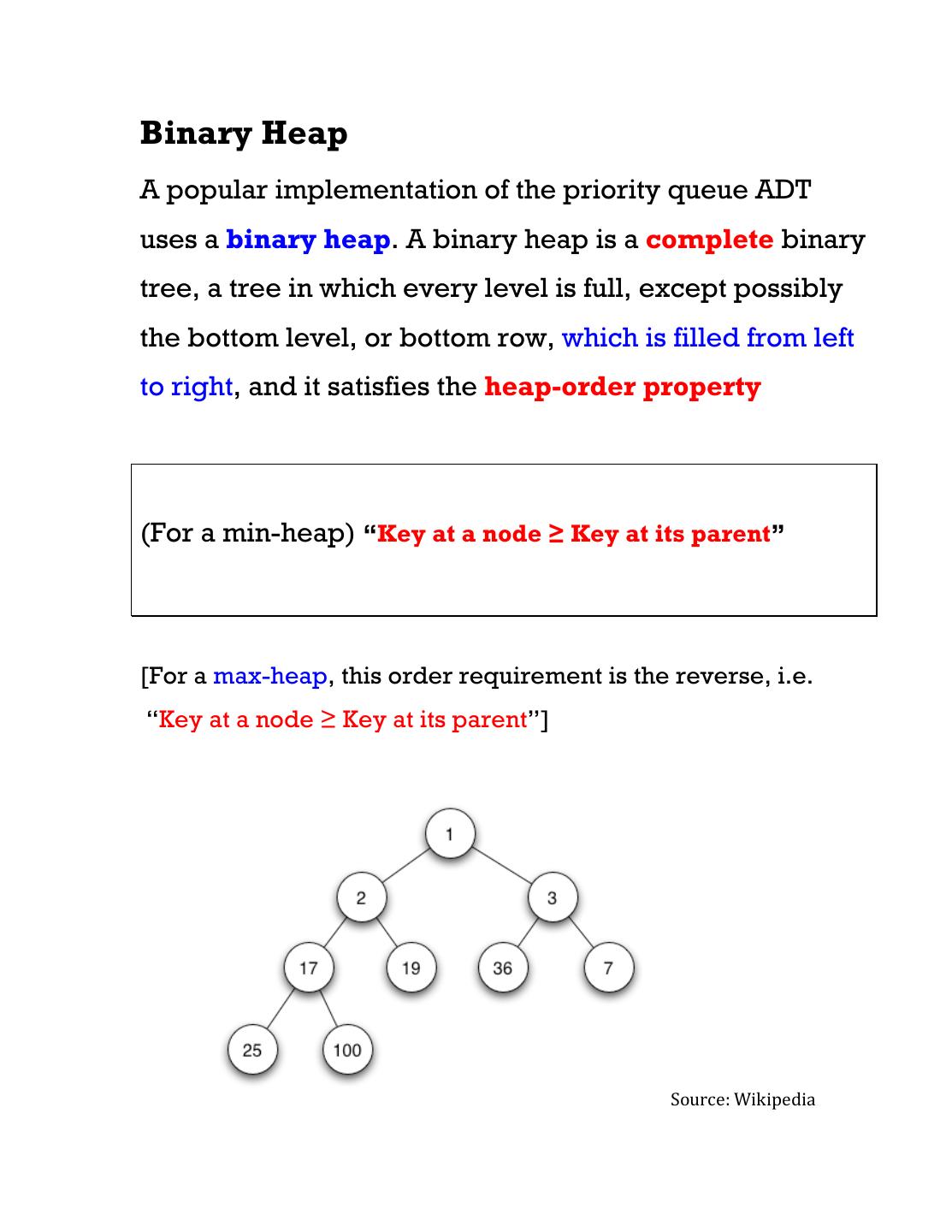
8 .Binary Heap A popular implementation of the priority queue ADT uses a binary heap. A binary heap is a complete binary tree, a tree in which every level is full, except possibly the bottom level, or bottom row, which is filled from left to right, and it satisfies the heap-order property (For a min-heap) “Key at a node ≥ Key at its parent” [For a max-heap, this order requirement is the reverse, i.e. “Key at a node ≥ Key at its parent”] Source: Wikipedia
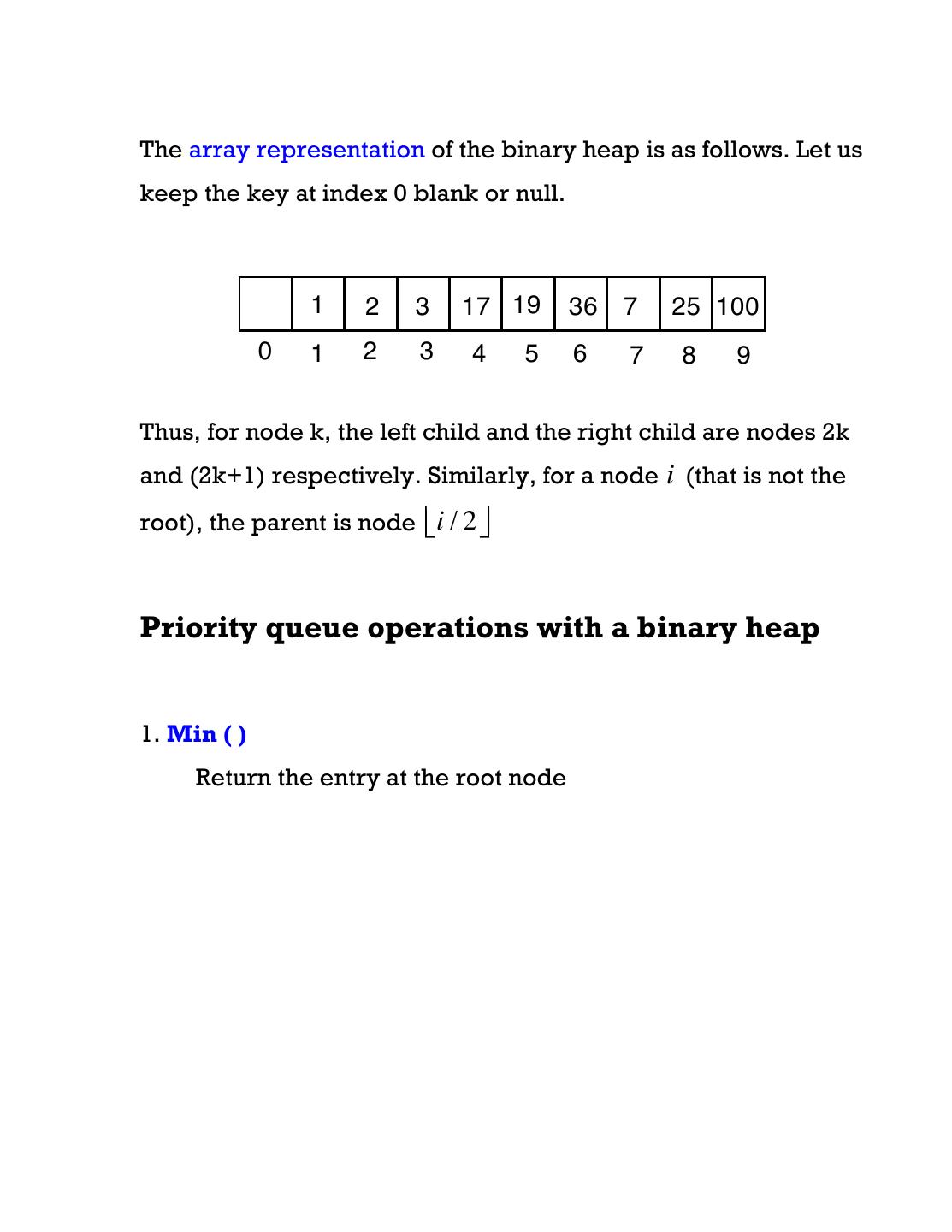
9 . The array representation of the binary heap is as follows. Let us keep the key at index 0 blank or null. 1 2 3 17 19 36 7 25 100 0 1 2 3 4 5 6 7 8 9 Thus, for node k, the left child and the right child are nodes 2k and (2k+1) respectively. Similarly, for a node i (that is not the root), the parent is node ⎢⎣ i / 2 ⎥⎦ Priority queue operations with a binary heap 1. Min ( ) Return the entry at the root node
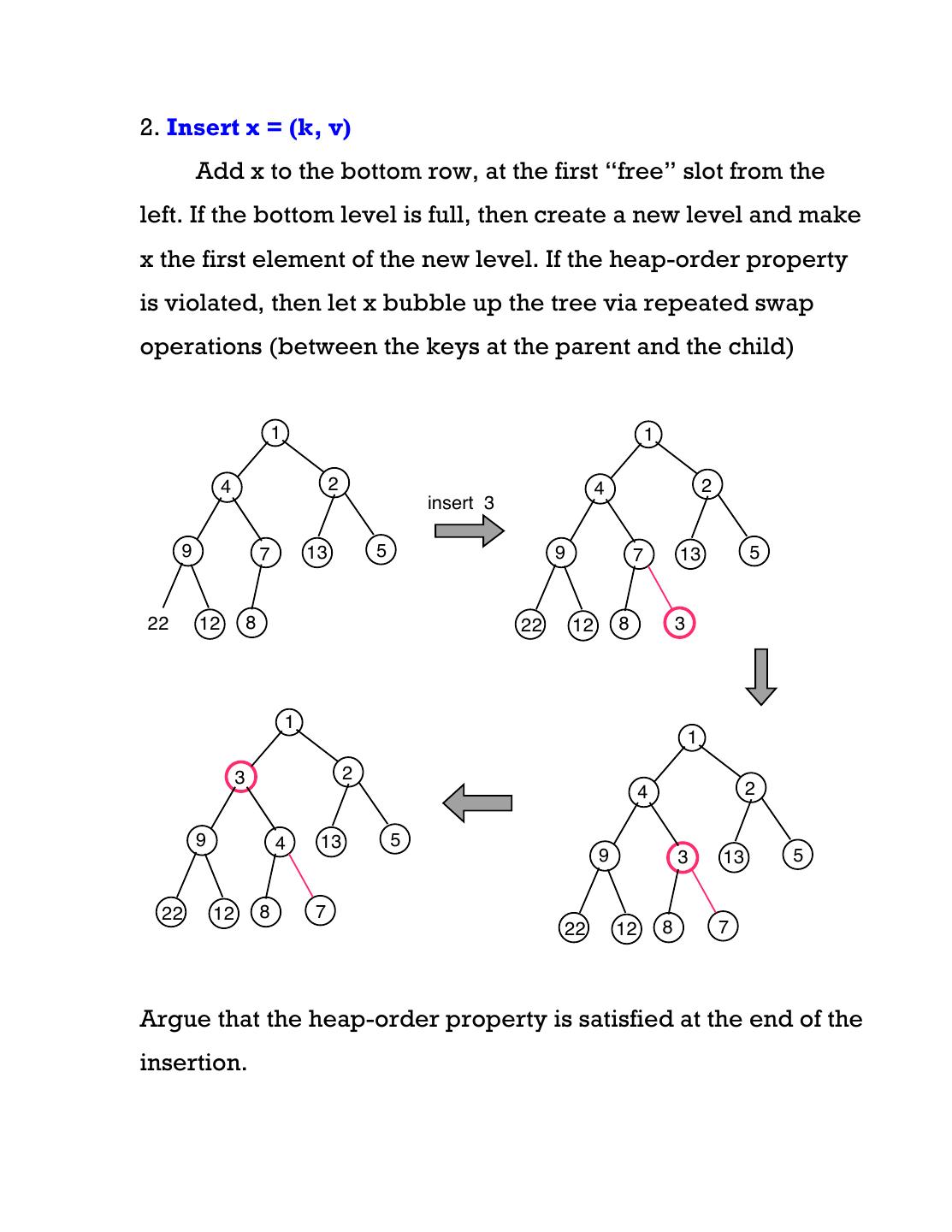
10 .2. Insert x = (k, v) Add x to the bottom row, at the first “free” slot from the left. If the bottom level is full, then create a new level and make x the first element of the new level. If the heap-order property is violated, then let x bubble up the tree via repeated swap operations (between the keys at the parent and the child) 1 1 4 2 4 2 insert 3 9 7 13 5 9 7 13 5 22 12 8 22 12 8 3 1 1 3 2 4 2 9 4 13 5 9 3 13 5 22 12 8 7 22 12 8 7 Argue that the heap-order property is satisfied at the end of the insertion.
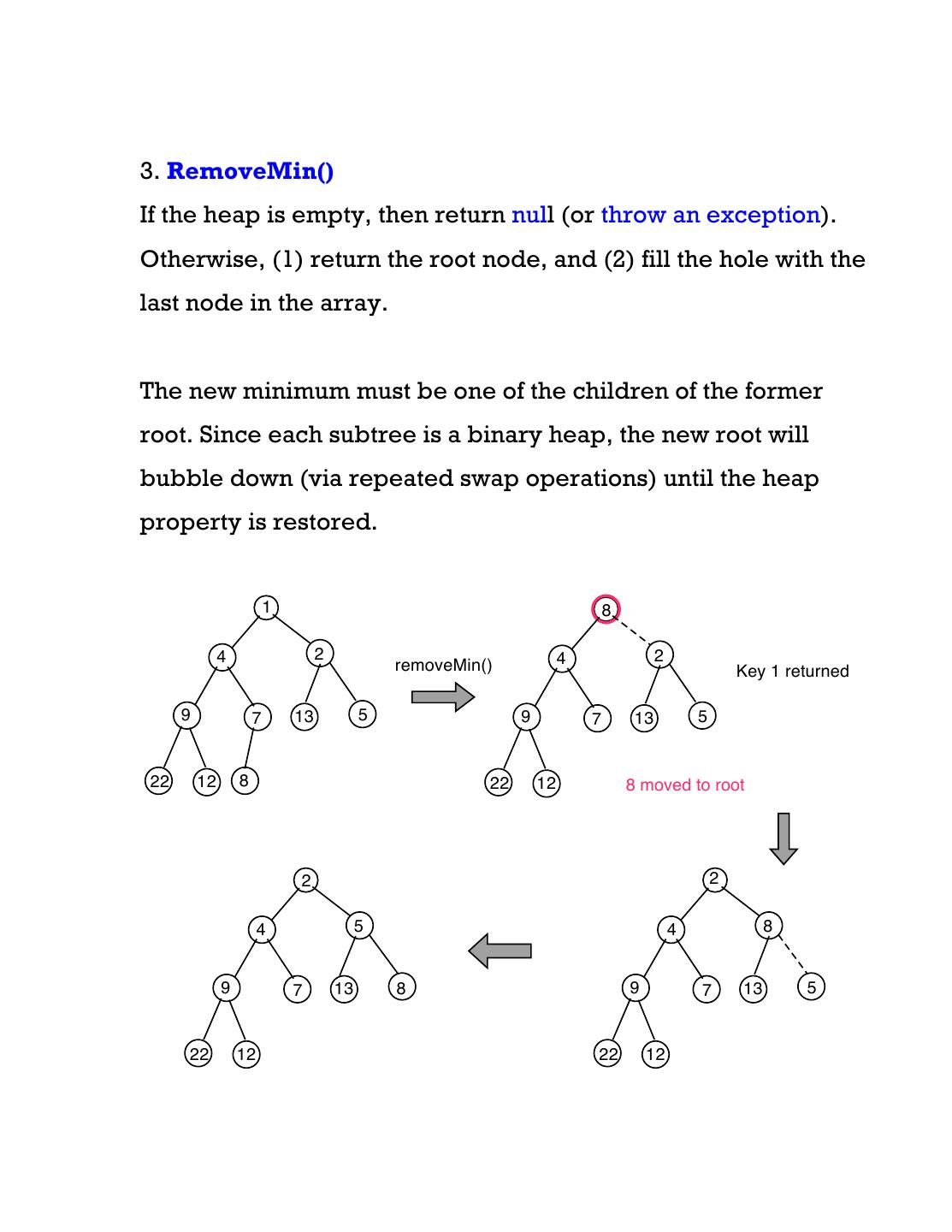
11 .3. RemoveMin() If the heap is empty, then return null (or throw an exception). Otherwise, (1) return the root node, and (2) fill the hole with the last node in the array. The new minimum must be one of the children of the former root. Since each subtree is a binary heap, the new root will bubble down (via repeated swap operations) until the heap property is restored. 1 8 4 2 4 2 removeMin() Key 1 returned 9 7 13 5 9 7 13 5 22 12 8 22 12 8 moved to root 2 2 4 5 4 8 9 7 13 8 9 7 13 5 22 12 22 12
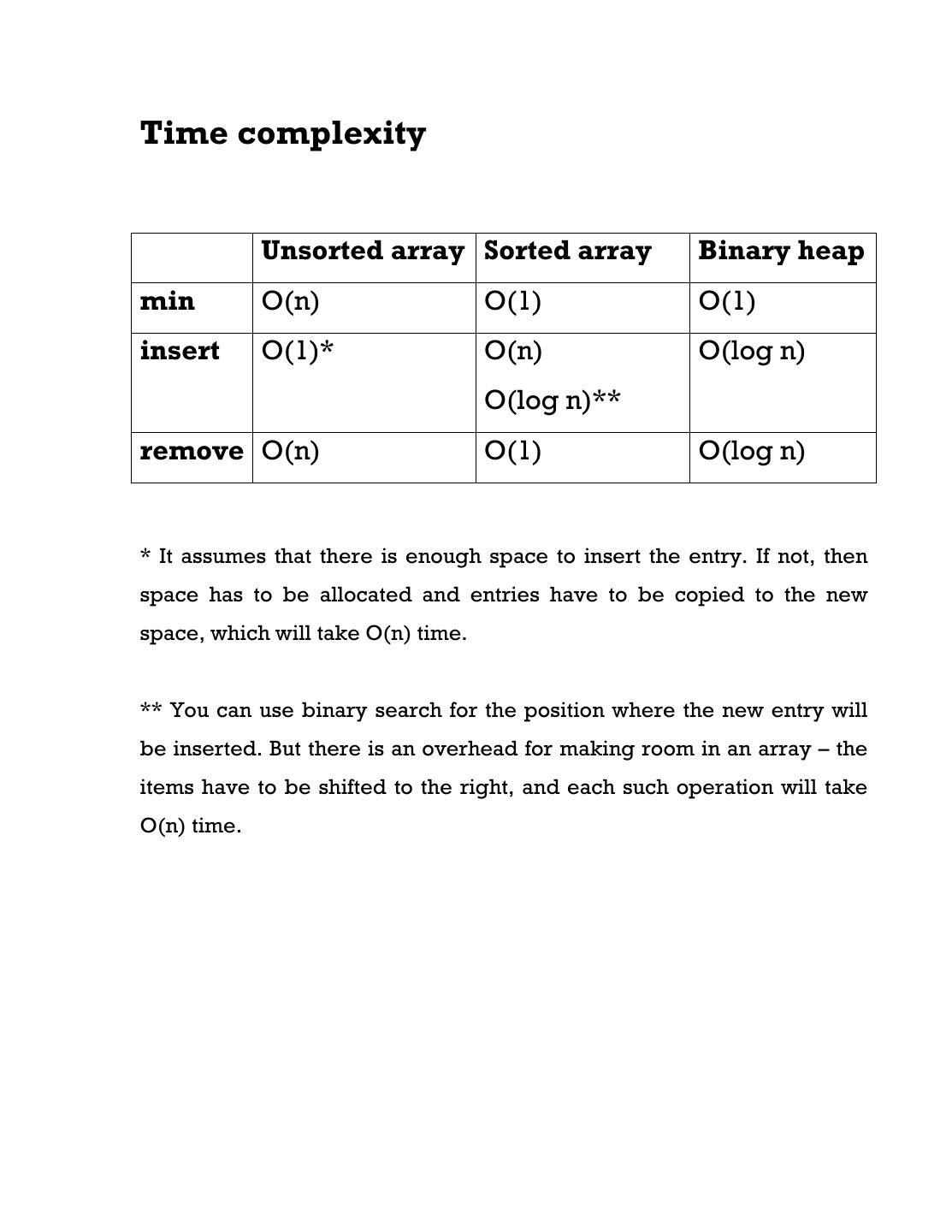
12 .Time complexity Unsorted array Sorted array Binary heap min O(n) O(1) O(1) insert O(1)* O(n) O(log n) O(log n)** remove O(n) O(1) O(log n) * It assumes that there is enough space to insert the entry. If not, then space has to be allocated and entries have to be copied to the new space, which will take O(n) time. ** You can use binary search for the position where the new entry will be inserted. But there is an overhead for making room in an array – the items have to be shifted to the right, and each such operation will take O(n) time.
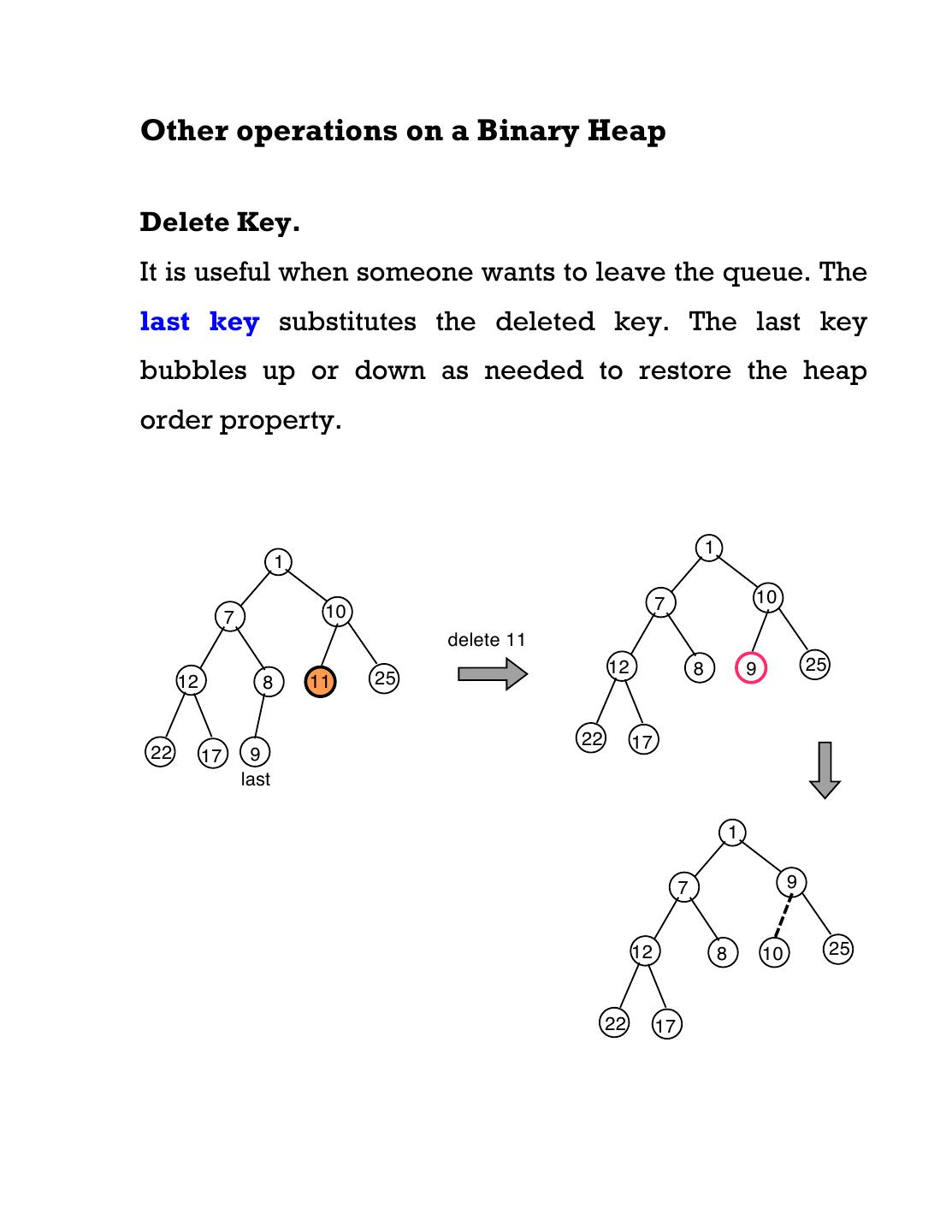
13 .Other operations on a Binary Heap Delete Key. It is useful when someone wants to leave the queue. The last key substitutes the deleted key. The last key bubbles up or down as needed to restore the heap order property. 1 1 7 10 7 10 delete 11 12 8 9 25 12 8 11 25 22 17 22 17 9 last 1 7 9 12 8 10 25 22 17
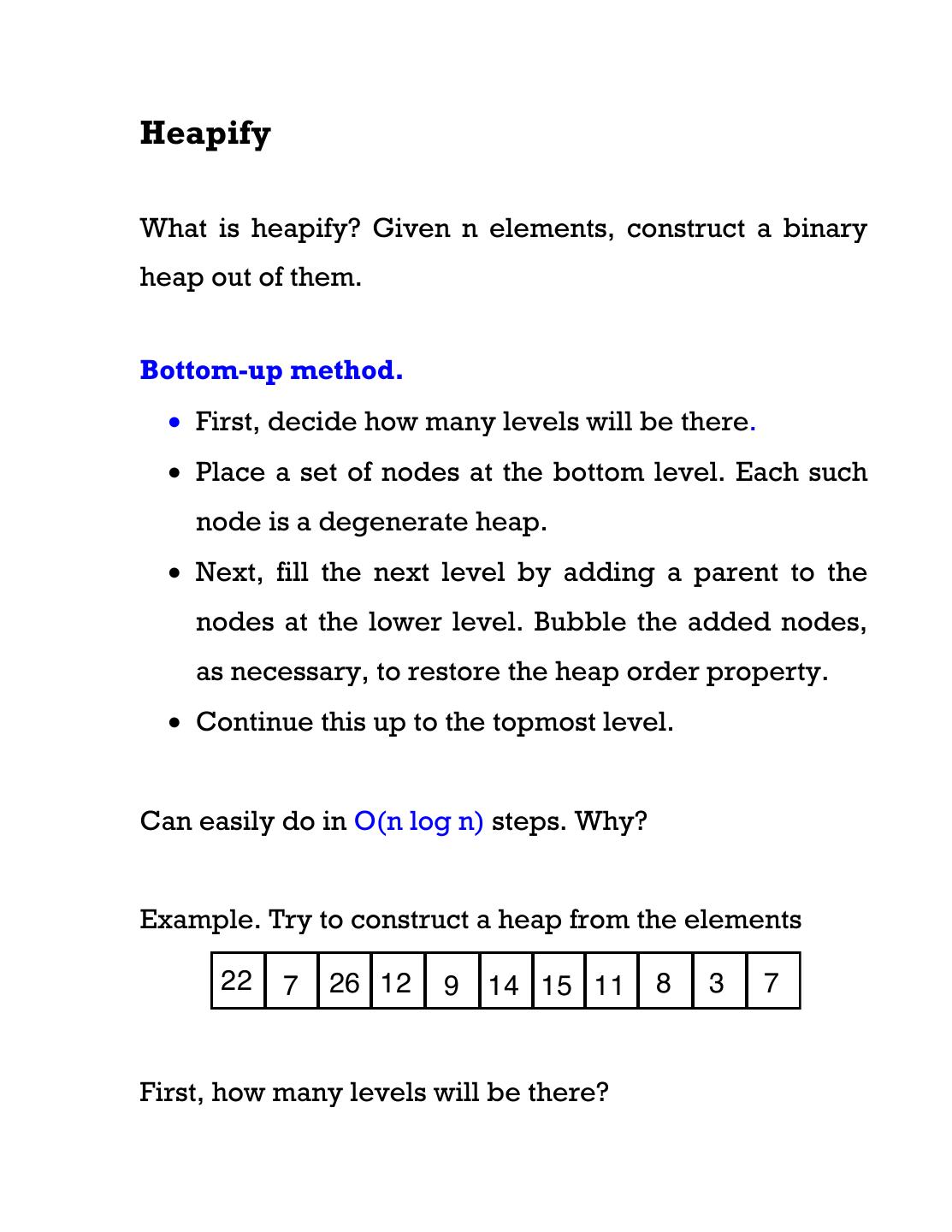
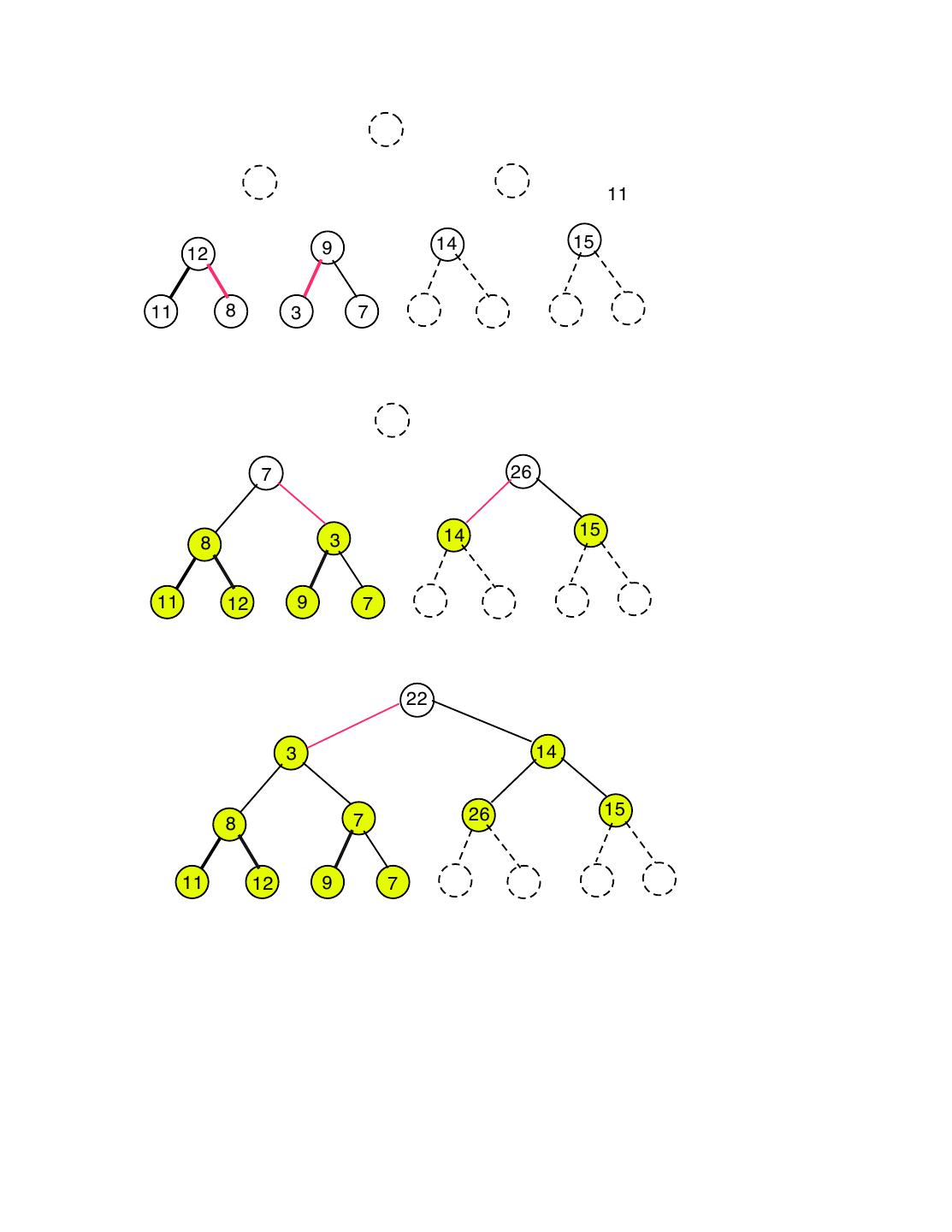
14 .Heapify What is heapify? Given n elements, construct a binary heap out of them. Bottom-up method. • First, decide how many levels will be there. • Place a set of nodes at the bottom level. Each such node is a degenerate heap. • Next, fill the next level by adding a parent to the nodes at the lower level. Bubble the added nodes, as necessary, to restore the heap order property. • Continue this up to the topmost level. Can easily do in O(n log n) steps. Why? Example. Try to construct a heap from the elements 22 7 26 12 9 14 15 11 8 3 7 First, how many levels will be there?
15 . 11 9 14 15 12 11 8 3 7 7 26 14 15 8 3 11 12 9 7 22 3 14 26 15 8 7 11 12 9 7
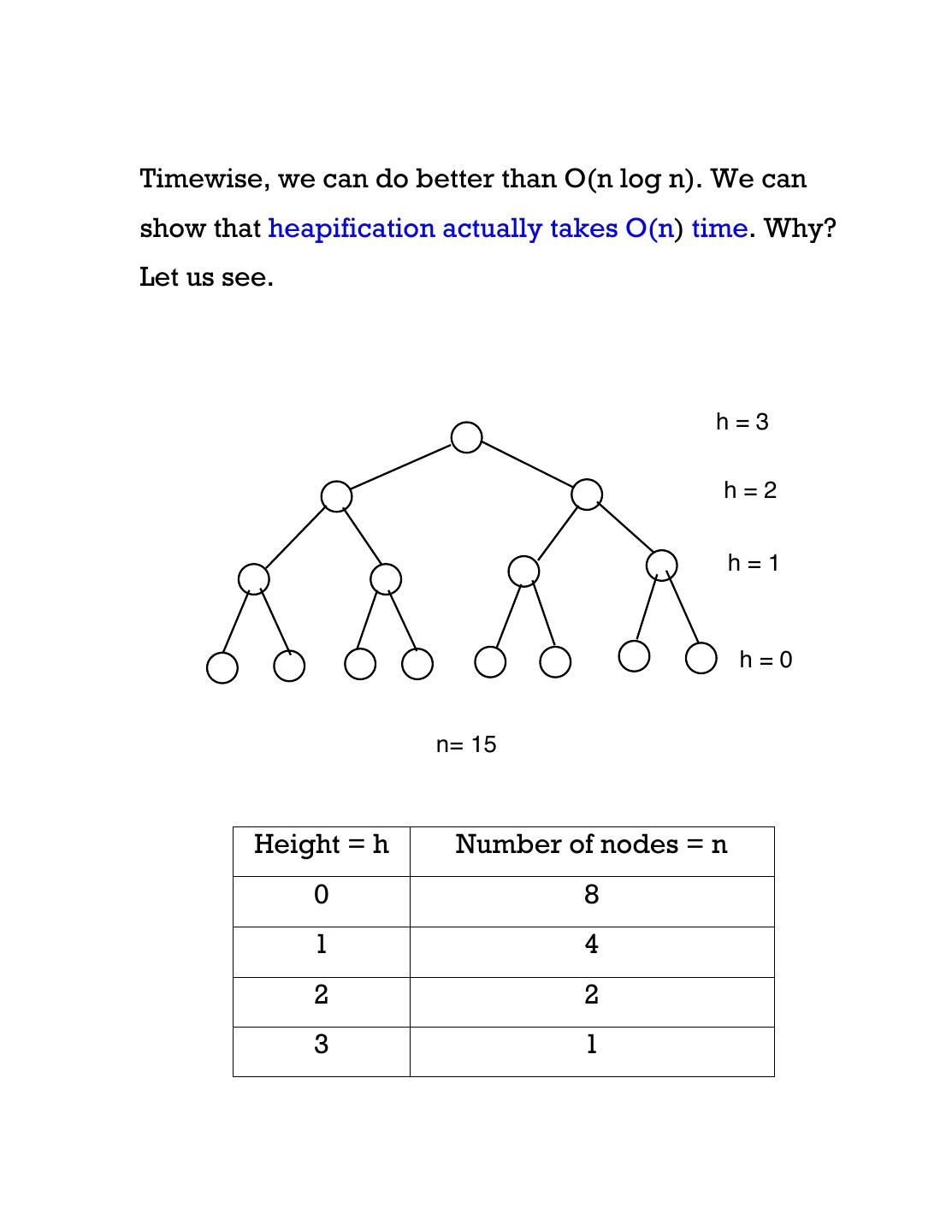
16 .Timewise, we can do better than O(n log n). We can show that heapification actually takes O(n) time. Why? Let us see. h=3 h=2 h=1 h=0 n= 15 Height = h Number of nodes = n 0 8 1 4 2 2 3 1
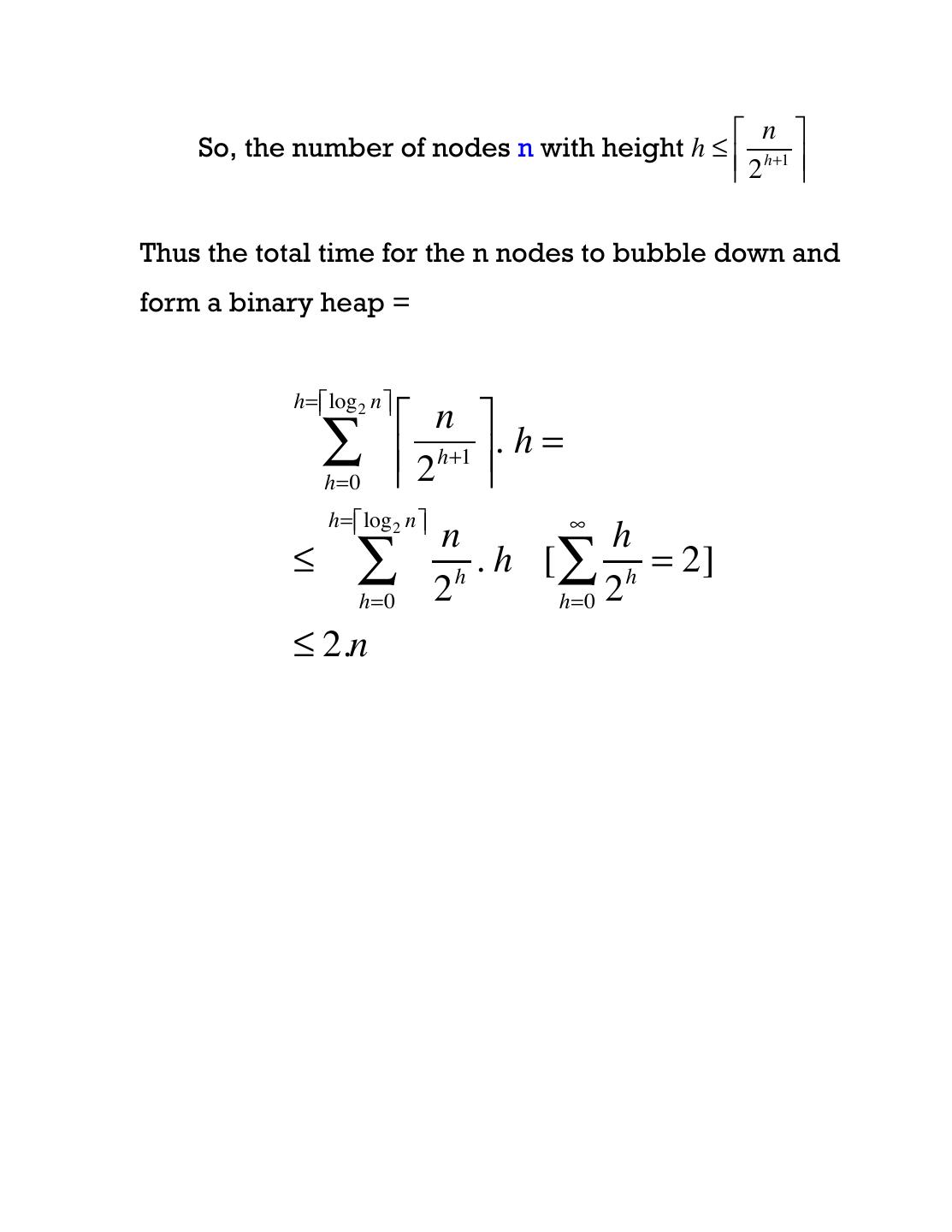
17 . ⎡ n ⎤ So, the number of nodes n with height h ≤ ⎢ h+1 ⎥ ⎢2 ⎥ Thus the total time for the n nodes to bubble down and form a binary heap = h= ⎡⎢ log 2 n ⎤⎥ ⎡ n ⎤ ∑ ⎢⎢ 2 h+1 ⎥⎥. h = h=0 h= ⎡⎢ log 2 n ⎤⎥ ∞ n h ≤ ∑ 2 h . h [∑ h = 2] h=0 h=0 2 ≤ 2.n
18 .Sorting with a priority queue 1. Insert elements into an empty priority queue 2. Remove the elements from the priority queue. If we implement the PQ with a binary heap, then we can sort in O(n log n) time, since each insert or delete operation in a binary heap takes O(log n) time. Phase 1. The kth insert takes O(log k) time. So this phase takes O(n log n) time. Phase 2. The jth removeMin() operation takes O(log (n-j+1)) time. So this phase takes O(n log n) time. This is the idea of heap-sort.
3秒后跳转登录页面
去登陆

