







- 快召唤伙伴们来围观吧
- 微博 QQ QQ空间 贴吧
- 文档嵌入链接
- 复制
- 微信扫一扫分享
- 已成功复制到剪贴板
IR continued
The trick to searching: queries are documents. Search evaluation: precision, recall, precision-recall curves; error rates. Classification: nearest neighbors and prototypes; classifier evaluation by mis-classification rate and by confusion matrices. Inverse document frequency weighting. Visualizing high-dimensional data by multi-dimensional scaling. Miscellaneous topics: stemming, incorporating user feedback.
展开查看详情
1 . Lecture 2: More Similarity Searching; Multidimensional Scaling 36-350: Data Mining 28 August 2009 Reading: Principles of Data Mining, sections 14.1–14.4 (skiping 14.3.3 for now) and 3.7. Let’s recap where we left similarity searching for documents. We represent each document as a bag of words, i.e., a vector giving the number of times each word occurred in the document. This abstracts away all the grammatical structure, context, etc., leaving us with a matrix whose rows are feature vectors, a data frame. To find documents which are similar to a given document Q, we calculate the distance between Q and all the other documents, i.e., the distance between their feature vectors. 1 Queries If we have a document in hand which we like, and we want to find the k doc- uments closest to it, we can do this once we know the distances between that document and all the others. But how can we get away from finding that one good document to begin with? The trick is that a query, whether an actual sentence (“What are the common problems of the 2001 model year Saturn?”) or just a list of key words (“problems 2001 model Saturn”) is a small document. If we represent user queries as bags of words, we can use our similarity searching procedure on them. This is really all it takes. 1.1 Evaluating Similarity Search When someone uses a search engine, they have some idea of which of the results are what they were looking for. In the jargon, we say that the good results were relevant to the query. There are actually two aspects to finding relevant documents, both of which are important: • Most of the results should be relevant; that is, the precision of the search should be high. 1
2 . • Most of the relevant items should be returned as results; that is, the recall should be high, too. Formally, if the search returns k items, r of which are relevant, and there are R relevant items in the whole corpus of N items, the precision is the ratio r/k, and the recall is the ratio r/R. (This is for one query, but we can average over queries.) Notice that r ≤ k, so there are limits on how high the recall can be when k is small. As we change k for a given query, we get different values for the precision and the recall. Generally, we expect that increasing k will increase recall (more relevant things can come in) but lower precision (more irrelevant things can come in, too). A good search method is one where the trade-off between precision and recall is not very sharp, where we can gain a lot of recall while losing on a little precision. A visual way of representing the precision-recall trade-off is to plot precision (on the vertical axis) against recall (on the horizontal axis) for multiple values of k. If the method is working well, when k is small the precision should be high, though the recall will be limited by k; as k grows, the recall should increase, moving us to the right, but the recall will fall, moving us down. So the precision- recall curve should going from somewhere near (1, 0) to somewhere near (0, 1). The total area under the curve is often used as a measure of how good the search method is. Of course, there is nothing magic about changing k; if we have a different search technique with a tunable setting, we can make a precision-recall curve for it, too. Search, Hypothesis Testing, Signal Detection, ROC It is no coincidence that the difference between precision and recall is very like the difference between type I and type II errors in hypothesis testing. High precision is like having a low type I error rate (most of the “hits’ are real); high recall is like having a low type II error rate (most things which should be hits are). The same idea applies to signal detection as well, where a type I error is called a “false alarm” (you thought there was signal when there was just noise) and a type II error is called a “miss” (you mistook signal for noise). The precision-recall curves actually come from signal detection theory, where they are called receiver operating characteristic curves, or ROC curves. Practice In practice, the only way to tell whether your search-engine’s results are relevant is to ask actual people (Figure 1). The major services do this with lab experiments, with special browsers given to testers to ask quiz them on whether the results were relevant, and by taking random samples of their query log and having testers repeat the queries to see whether the results were relevant. Naturally, this use of human beings is slow and expensive, especially because the raters have to be trained, so the amount of this data is limited — and they are very reluctant to share it. Notice, by the way, that when dealing with something like the web, or in- deed any large collection where users give arbitrary queries, it is a lot easier 2
3 .Figure 1: Search-engine evaluation in practice. Source: http://icanhascheezburger.com/2007/01/11/ this-is-relevant-to-my-interests-2/. to estimate precision than recall (how do you find R, the number of genuinely relevant documents in the whole corpus?). 2 Classification One very important data-mining task is classifying new pieces of data, that is, assigning them to one of a fixed number of classes. Last time, our two classes were “stories about music” and “stories about the other arts”. Usually, new data doesn’t come with a class label, so we have to somehow guess the class from the features.1 Two very basic strategies become available as soon as we can measure similarity or distance. 1. With a nearest neighbor strategy, we guess that the new object is in the same class as the closest already-classified object. (We saw this at the end of the last lecture.) Similarity search is in a way just the reverse: we 1 If it does come with a label, we read the label. 3
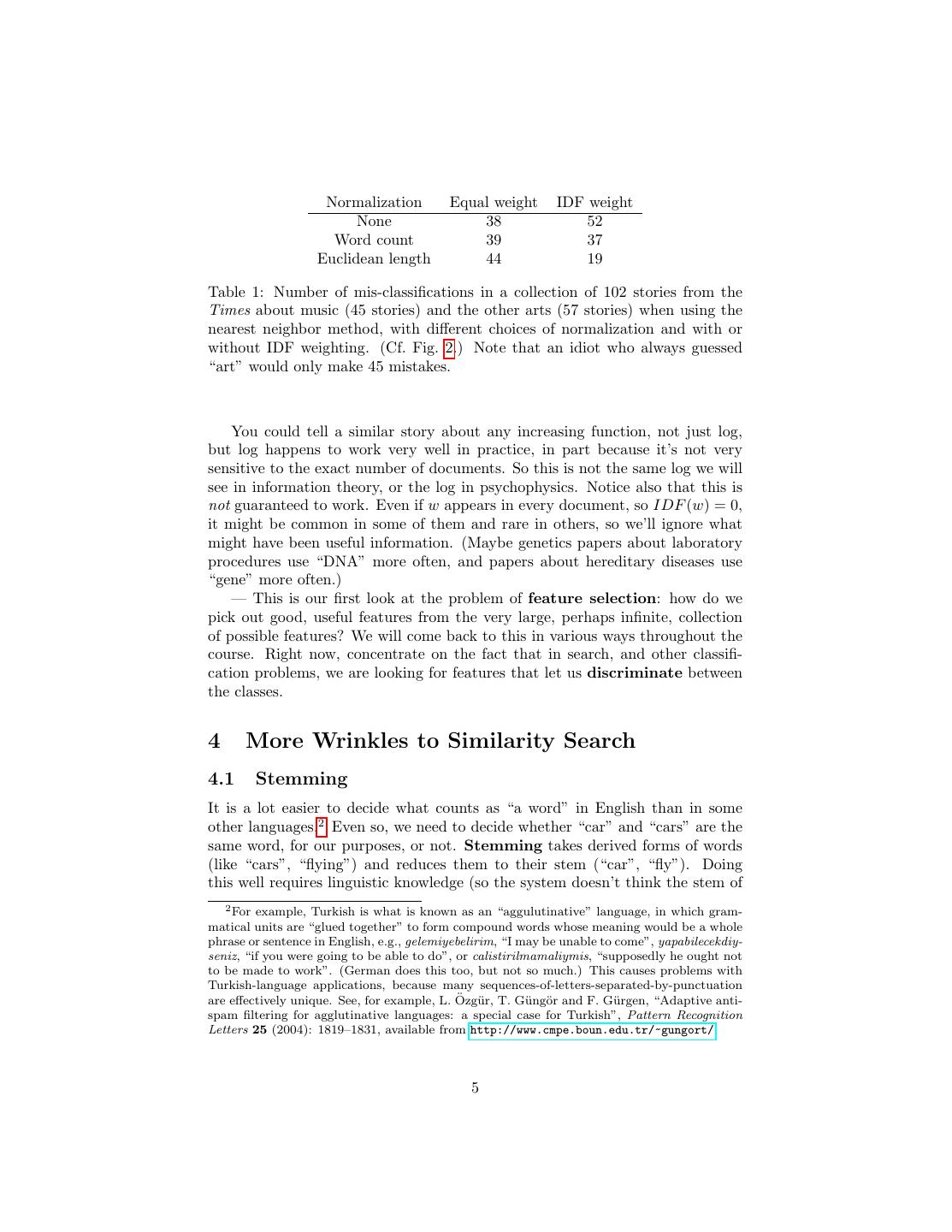
4 . guess that the nearest neighbor is in the same class (“is relevant”) as the query. 2. With a prototype strategy, we pick out the “most representative” mem- ber of each class, or perhaps the average of each class, as its prototype, and guess that new objects belong to the class with the closer prototype. We will see many other classification methods before the course is over. All classification methods can be evaluated on their error rate or mis- classification rate, which is simply the fraction of cases they get wrong, by assigning them to the wrong class. (A classifier’s mis-classification rate is also sometimes just called its inaccuracy.) A more refined analysis distinguishes between different kinds of errors. For each class i, we record what fraction of i’s are guessed to be of class j, and get a little matrix called the confusion matrix. (The diagonal entries show probabilities of correct classifications.) For two classes, this gives us the type I and type II error rates again — though which is which is arbitrary. 3 Inverse Document Frequency Someone asked in class last time about selectively paying less attention to certain words, especially common words, and more to the rest. This is an excellent notion. Not all features are going to be equally useful, and some words are so common that they give us almost no ability at all to discriminate between relevant and irrelevant documents. In (most) collections of English documents, looking at “the”, “of”, “a”, etc., is a waste of time. We could handle this by a fixed list of stop words, which we just don’t count, but this at once too crude (all or nothing) and too much work (we need to think up the list). Inverse document frequency (IDF) is a more adaptive approach. The document frequency of a w is the number of documents it appears in, nw . The IDF weight of w is N IDF (w) ≡ log nw where N is the total size of our collection. Now when we make our bag-of- words vector for the document Q, the number of times w appears in Q, Qw , is multiplied by IDF (w). Notice that if w appears in every document, nw = N and it gets an IDF weight of zero; we won’t use it to calculate distances. This takes care of most of the things we’d use a list of stop-words for, but it also takes into account, implicitly, the kind of documents we’re using. (In a data base of papers on genetics, “gene” and “DNA” are going to have IDF weights of near zero too.) On the other hand, if w appears in only a few documents, it will get a weight of about log N , and all documents containing w will tend to be close to each other. Table 1 shows how including IDF weighting, along with Euclidean length normalization, dramatically improves our ability to classify posts as either about music or about the other arts. 4
5 . Normalization Equal weight IDF weight None 38 52 Word count 39 37 Euclidean length 44 19 Table 1: Number of mis-classifications in a collection of 102 stories from the Times about music (45 stories) and the other arts (57 stories) when using the nearest neighbor method, with different choices of normalization and with or without IDF weighting. (Cf. Fig. 2.) Note that an idiot who always guessed “art” would only make 45 mistakes. You could tell a similar story about any increasing function, not just log, but log happens to work very well in practice, in part because it’s not very sensitive to the exact number of documents. So this is not the same log we will see in information theory, or the log in psychophysics. Notice also that this is not guaranteed to work. Even if w appears in every document, so IDF (w) = 0, it might be common in some of them and rare in others, so we’ll ignore what might have been useful information. (Maybe genetics papers about laboratory procedures use “DNA” more often, and papers about hereditary diseases use “gene” more often.) — This is our first look at the problem of feature selection: how do we pick out good, useful features from the very large, perhaps infinite, collection of possible features? We will come back to this in various ways throughout the course. Right now, concentrate on the fact that in search, and other classifi- cation problems, we are looking for features that let us discriminate between the classes. 4 More Wrinkles to Similarity Search 4.1 Stemming It is a lot easier to decide what counts as “a word” in English than in some other languages.2 Even so, we need to decide whether “car” and “cars” are the same word, for our purposes, or not. Stemming takes derived forms of words (like “cars”, “flying”) and reduces them to their stem (“car”, “fly”). Doing this well requires linguistic knowledge (so the system doesn’t think the stem of 2 For example, Turkish is what is known as an “aggulutinative” language, in which gram- matical units are “glued together” to form compound words whose meaning would be a whole phrase or sentence in English, e.g., gelemiyebelirim, “I may be unable to come”, yapabilecekdiy- seniz, “if you were going to be able to do”, or calistirilmamaliymis, “supposedly he ought not to be made to work”. (German does this too, but not so much.) This causes problems with Turkish-language applications, because many sequences-of-letters-separated-by-punctuation ¨ ur, T. G¨ are effectively unique. See, for example, L. Ozg¨ ung¨ or and F. G¨urgen, “Adaptive anti- spam filtering for agglutinative languages: a special case for Turkish”, Pattern Recognition Letters 25 (2004): 1819–1831, available from http://www.cmpe.boun.edu.tr/~gungort/. 5
6 .“potatoes” is “potatoe”, or that “gravity” is the same as “grave”), and it can even be harmful (if the document has “Saturns”, plural, it’s most likely about the cars). 4.2 Feedback People are much better at telling whether you’ve found what they’re looking for than they are at explaining what it is that they’re looking for. (They know it when they see it.) Queries are users trying to explain what they’re looking for (to a computer, no less), so they’re often pretty bad. An important idea in data mining is that people should do things at which they are better than computers and vice versa: here they should be deciders, not explainers. Rocchio’s algo- rithm takes feedback from the user, about which documents were relevant, and then refines the search, giving more weight to what they like, and less to what they don’t like. The user gives the system some query, whose bag-of-words vector is Qt . The system responses with various documents, some of which the user marks as relevant (R) and others as not-relevant (N R). (See Fig. 1 again.) The system then modifies the query vector: β γ Qt+1 = αQt + doc − doc |R| |N R| doc∈R doc∈N R where |R| and |N R| are the number of relevant and non-relevant documents, and α, β and γ are positive constants. α says how much continuity there is between the old search and the new one; β and γ gauge our preference for recall (we find more relevant items) versus precision (more of what we find is relevant). The system then runs another search with Qt+1 , and cycle starts over. As this repeats, Qt gets closer to the bag-of-words vector which best represents what the user has in mind, assuming they have something definite and consistent in mind. N.B.: A word can’t appear in a document a negative number of times, so or- dinarily bag-of-words vectors have non-negative components. Qt , however, can easily come to have negative components, indicating the words whose presence is evidence that the document isn’t relevant. Recalling the example of problems with used 2001 Saturns, we probably don’t want anything which contains “Ti- tan” or “Rhea”, since it’s either about mythology or astronomy, and giving our query negative components for those words suppresses those documents. Rocchio’s algorithm works with any kind of similarity-based search, not just text. It’s related to many machine-learning procedures which incrementally ad- just in the direction of what has worked and away from what has not — the stochastic approximation algorithm for estimating functions and curves, re- inforcement learning for making decisions, Bayesian learning for updating conditional probabilities, and multiplicative weight training for combining predictors (which we’ll look at later in the course). This is no accident; they are all special cases of adaptive evolution by means of natural selection. 6
7 .5 Visualization: Multidimensional Scaling The bag-of-words vectors representing our documents generally live in spaces with lots of dimensions, certainly more than three, which are hard for ordinary humans to visualize. However, we can compute the distance between any two vectors, so we know how far apart they are. Multidimensional scaling (MDS) is the general name for a family of algorithms which take high-dimensional vectors and map them down to two- or three-dimensional vectors, trying to preserve all the relevant distances. Abstractly, the idea is that we start with vectors v1 , v2 , . . . vn in a p-dimensional space, where p is large, and we want to find new vectors x1 , x2 , . . . xn in R2 or R3 such that n 2 (δ(v1 , v2 ) − d(x1 , x2 )) i=1 j=i is as small as possible, where δ is distance in the original space and d is Eu- clidean distance in the new space. Note that the new or image points xi are representations of the vi , i.e., representations of representations. There is some trickiness to properly minimizing this objective function — for instance, if we rotate all the xi through a common angle, their distances are unchanged, but it’s not really a new solution — and it’s not usually possible to make it exactly zero (See Sec. 3.7 in the textbook for details.) We will see a lot of multidimensional scaling plots, because they are nice visualization tools, but we will also see a lot of other data reduction or dimensionality reduction methods, because sometimes it’s more important to preserve other properties than distances. Notice that while the bag of words representation gives each of our original coordinates/features some meaning — it says something very definite about the document being represented — that’s not the case with the coordinates we get after doing the MDS. If nothing else, the fact that we could rotate all of the image points arbitrarily makes it very hard to assign any interpretation to where the images fall on the axes. This is true of many other dimensionality-reduction methods as well. 7
8 . Euclidean-length normalization 0.4 0.2 mds.coords[,2] 0.0 -0.2 -0.2 0.0 0.2 0.4 0.6 0.8 mds.coords[,1] IDF weights and Euclidean-length normalization 0.2 0.1 0.0 mds.coords[,2] -0.1 -0.2 -0.3 -0.4 -0.3 -0.2 -0.1 0.0 0.1 0.2 mds.coords[,1] Figure 2: Illustrations of multidimensional scaling for the 102 art/music stories (art=red, music=blue), with and without IDF weights. This was produced using the R command cmdscale (plus a little extra code to plot it nicely). Notice that with IDF weights, the two classes are far more distinct visually, which comes through in the classification results in Table 1. 8
相关推荐

加关注
3秒后跳转登录页面
去登陆

