展开查看详情
1 .Design of the MIPS Processor (contd)
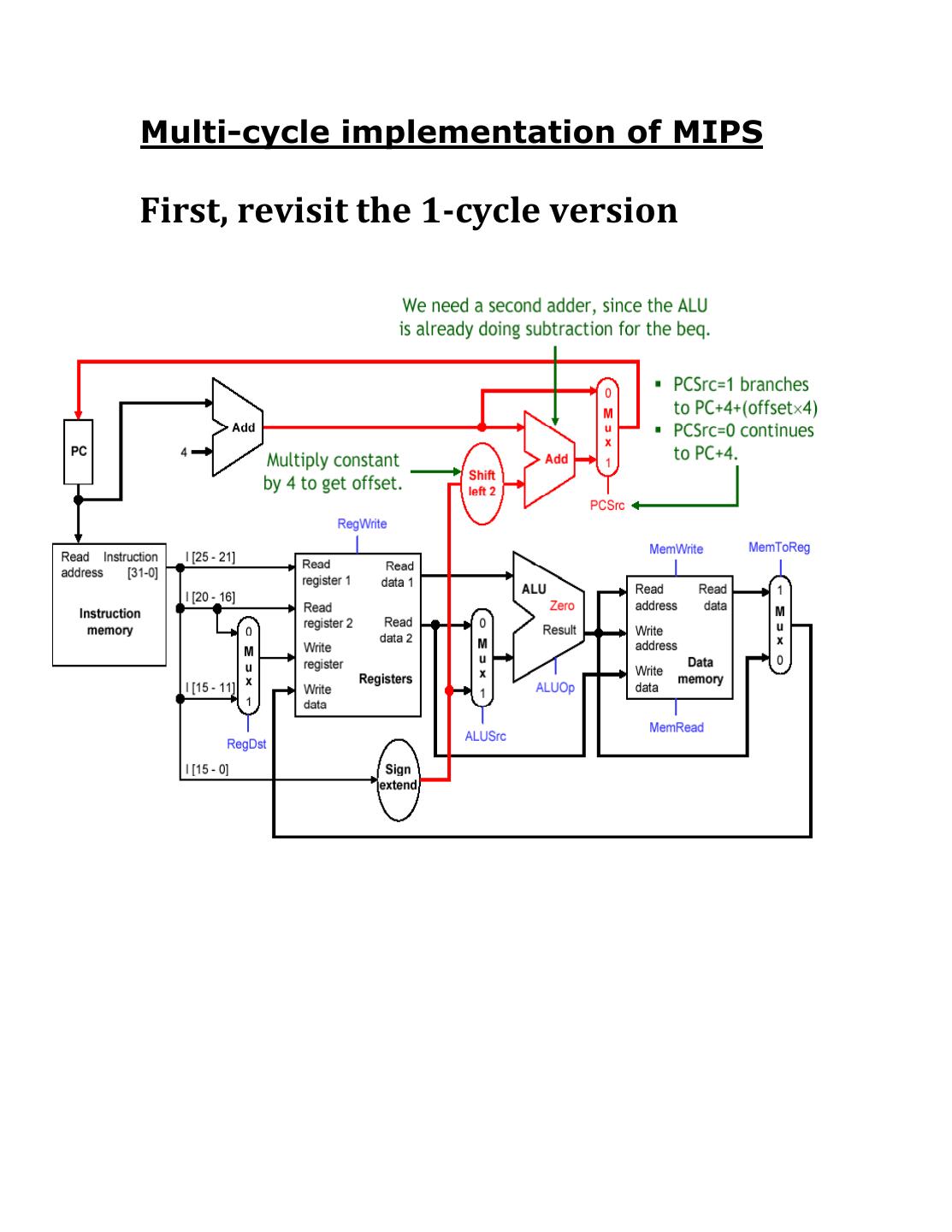
First, revisit the datapath for add, sub, lw, sw.
We will augment it to accommodate the beq
and j instructions.
Execution of branch instructions
beq $at, $zero, L
add $v1, $v0, $zero
add $v1, $v1, $v1
j somewhere
L: add $v1, $v0, $v0
Offset= 3x4=12
The offset must be added to the next PC to
generate the target address for branch.
�
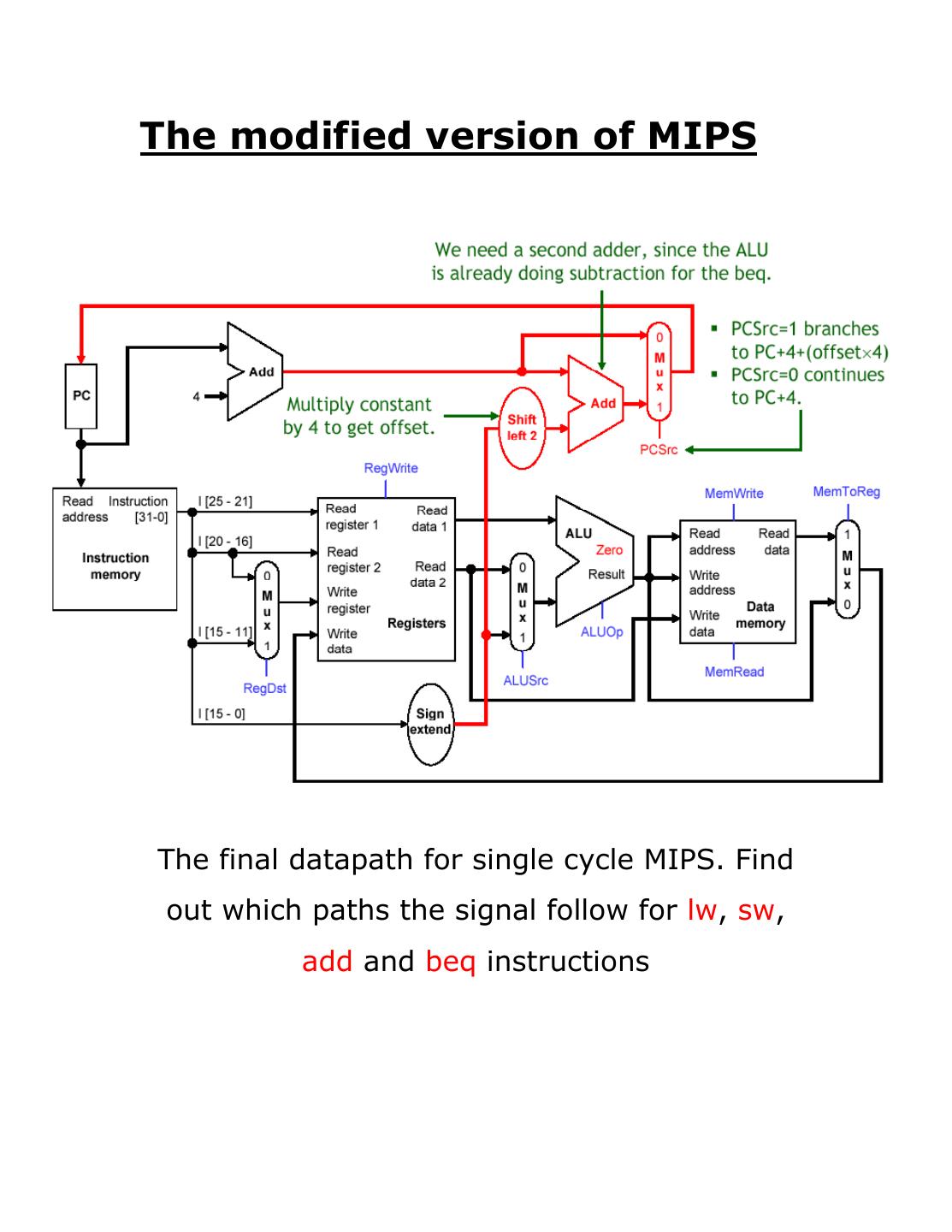
2 .The modified version of MIPS
The final datapath for single cycle MIPS. Find
out which paths the signal follow for lw, sw,
add and beq instructions
�
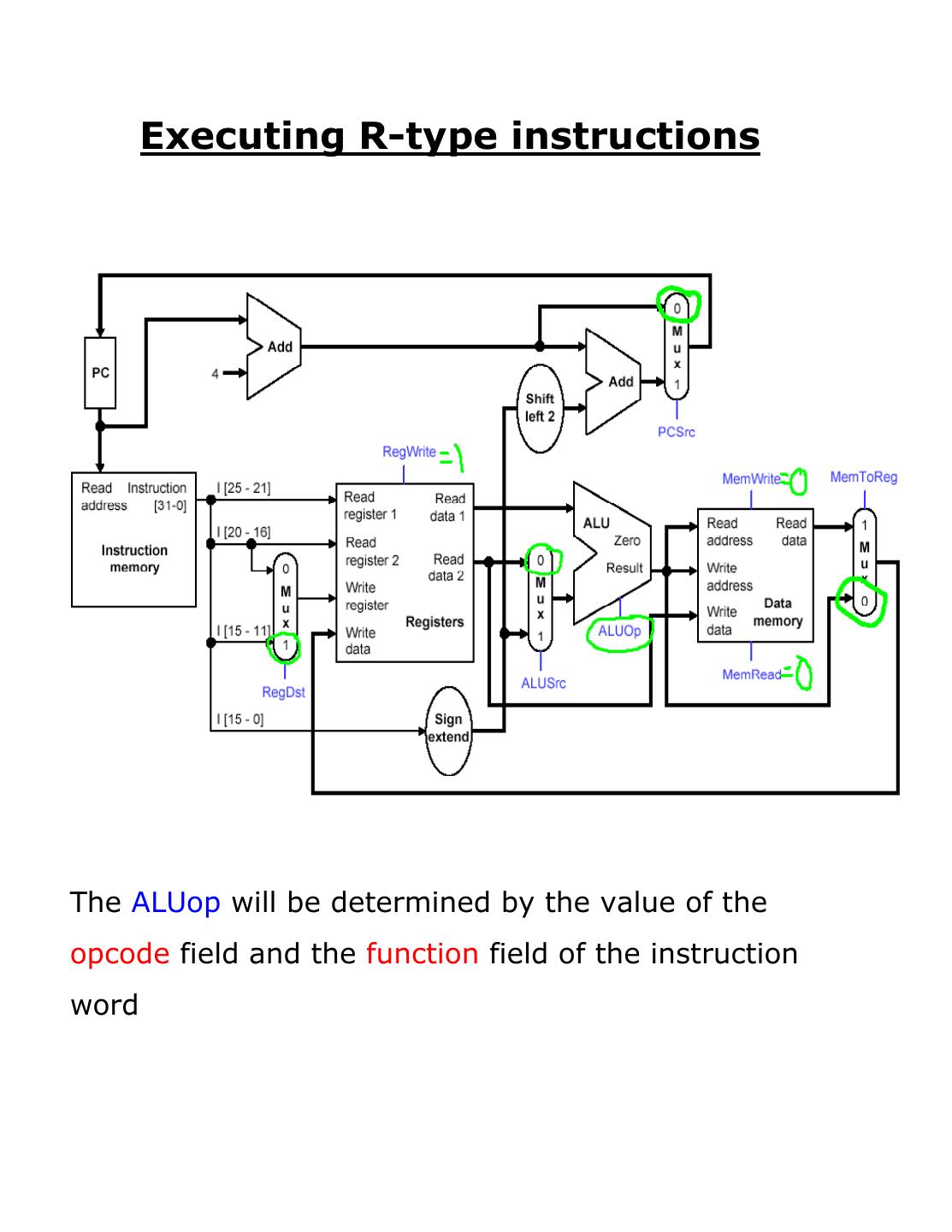
3 . Executing R-type instructions
The ALUop will be determined by the value of the
opcode field and the function field of the instruction
word
�
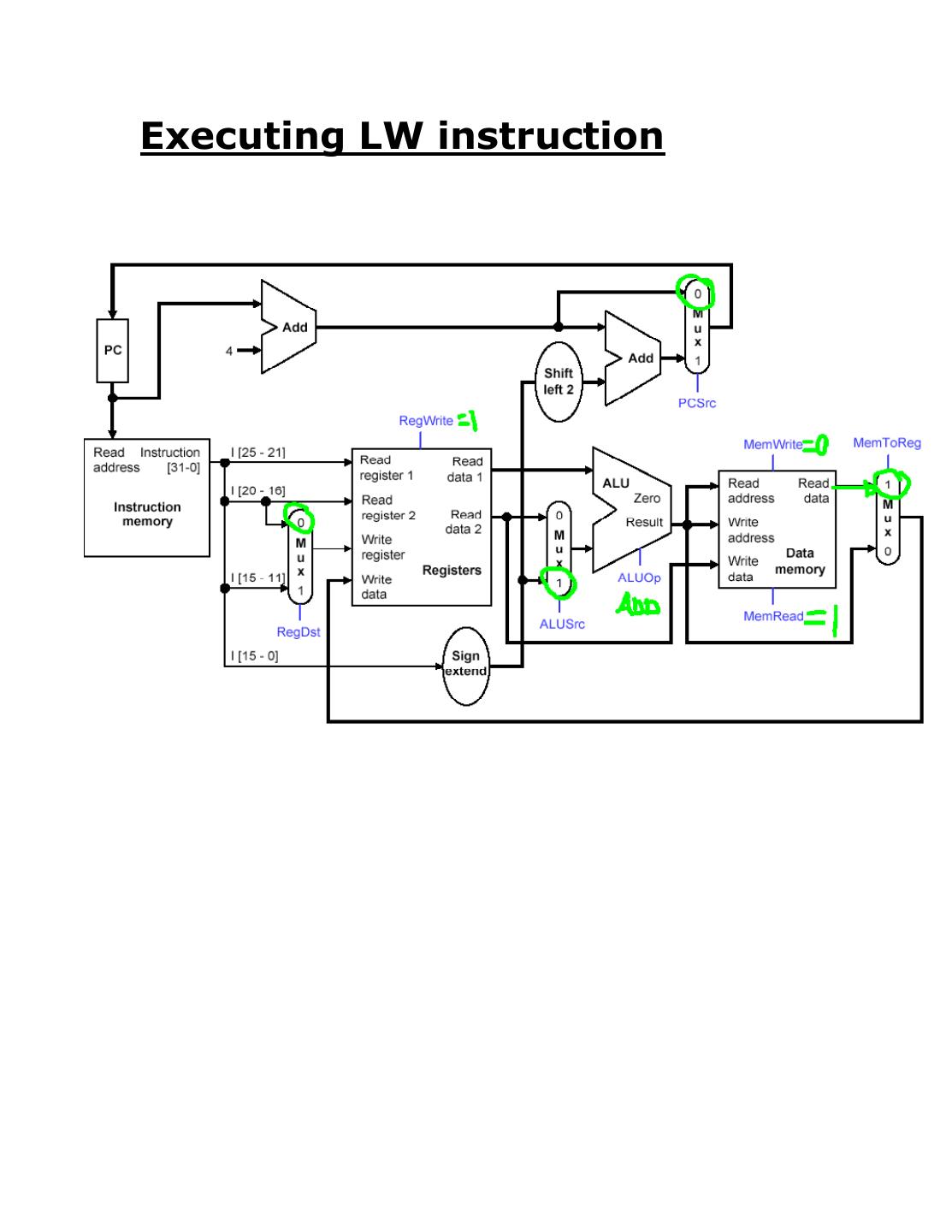
4 .Executing LW instruction
�
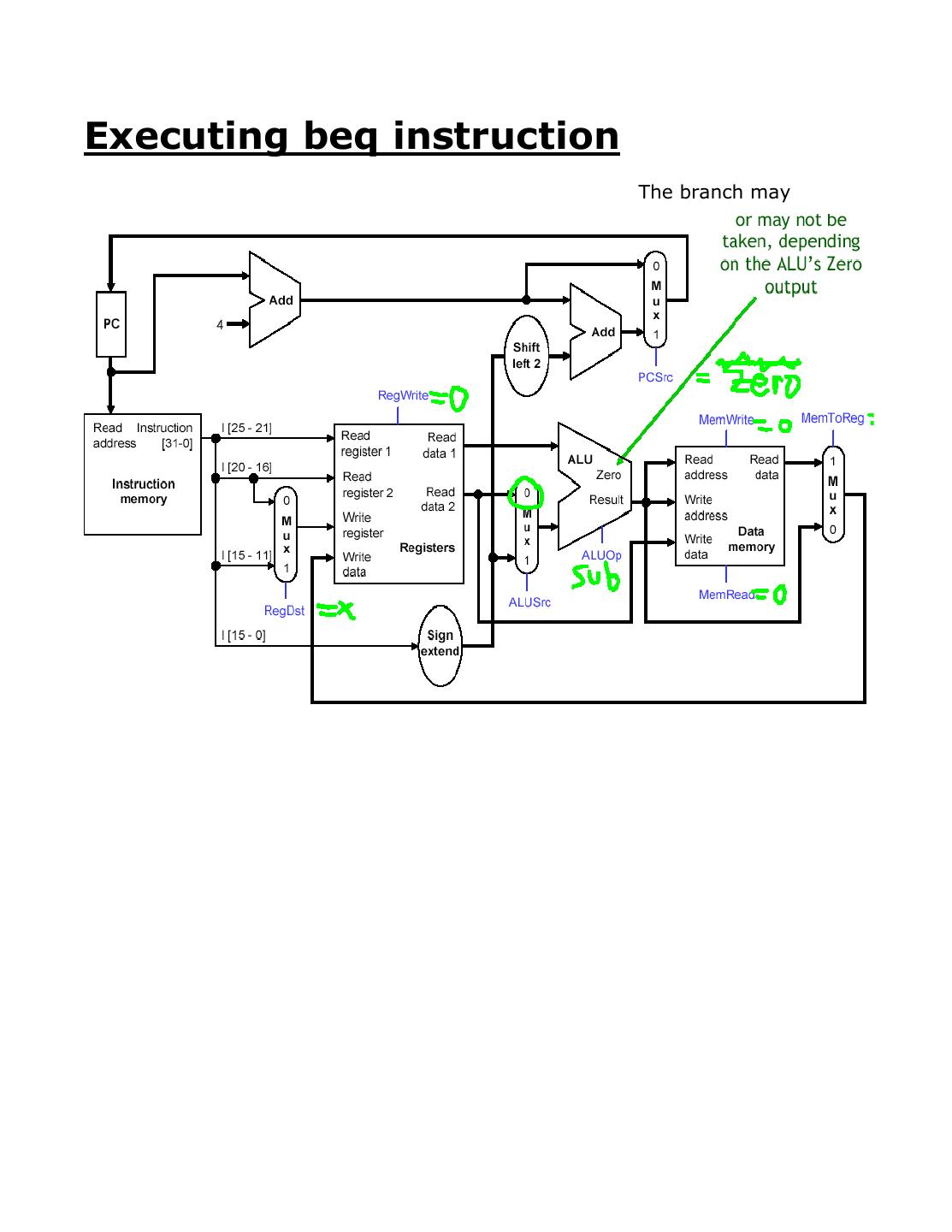
5 .Executing beq instruction
The branch may
�
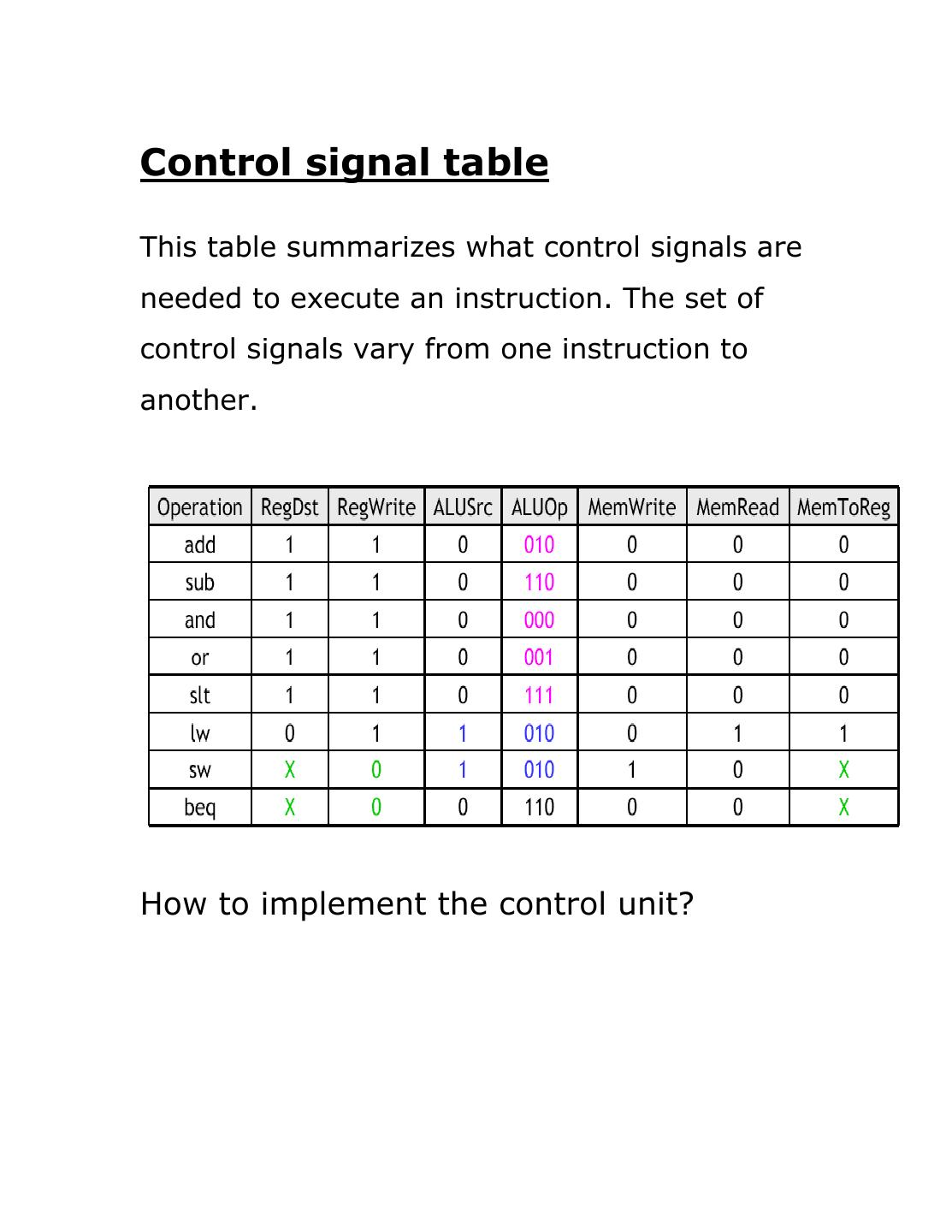
6 .Control signal table
This table summarizes what control signals are
needed to execute an instruction. The set of
control signals vary from one instruction to
another.
How to implement the control unit?
�
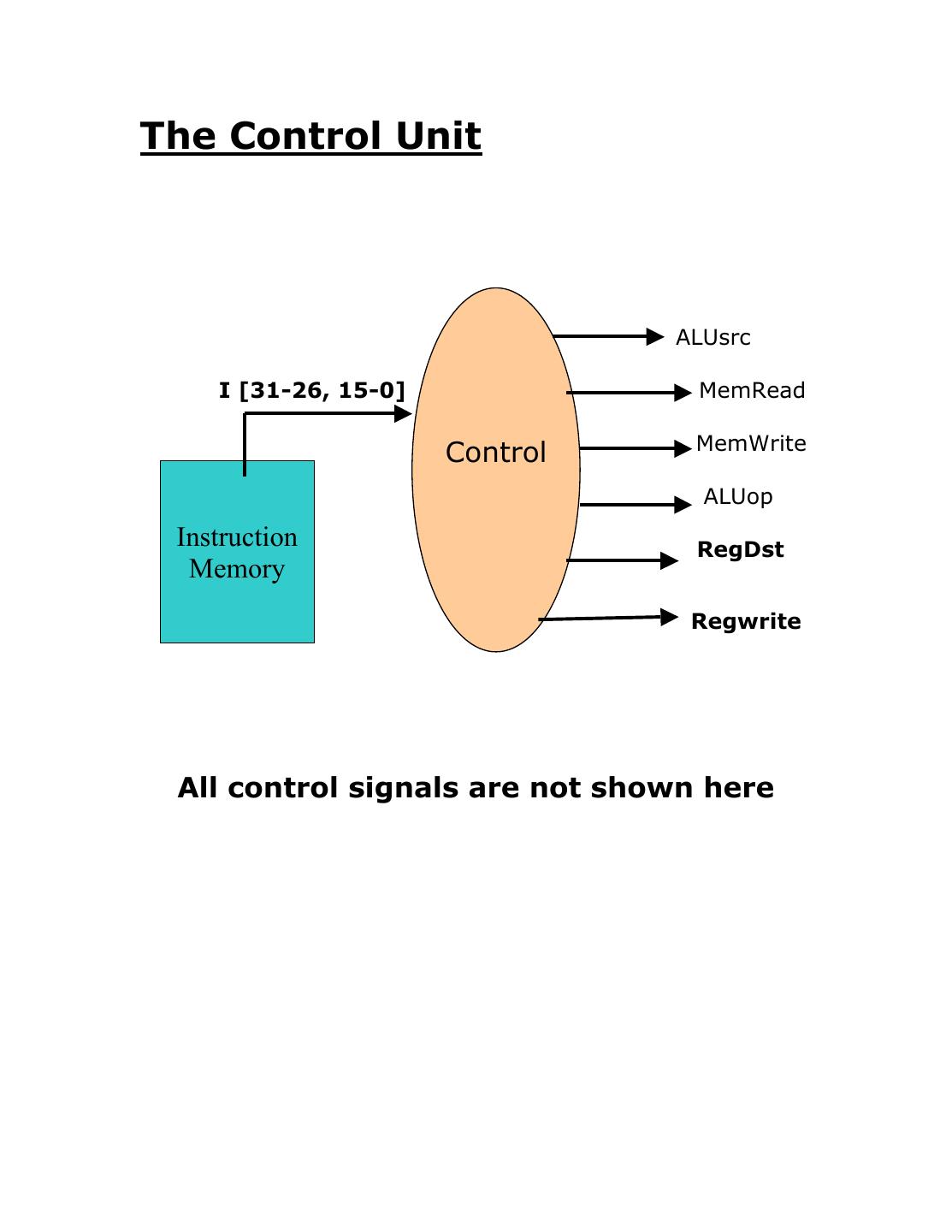
7 .The Control Unit
ALUsrc
I [31-26, 15-0] MemRead
MemWrite
Control
ALUop
Instruction RegDst
Memory
Regwrite
All control signals are not shown here
�
8 . 1-cycle implementation is not used
Why? Because the length of the clock cycle will
always be determined by the slowest operation
(lw, sw) even when the data memory is not
used. Practical implementations use multiple
cycles per instruction, which fixes some
shortcomings of the 1-cycle implementation.
Faster instructions are not held back by the slower
instructions
The clock cycle time can be decreased.
Eventually simplifies the implementation of
pipelining, the universal speed-up technique
This requires some changes in the datapath
�
9 .Multi-cycle implementation of MIPS
!"#$%&'#()"$"%'%*('+,-.-/(')(#$"01''
�
10 .The multi-cycle version
Note that we have eliminated two adders, and
used only one memory unit (so it is Princeton
architecture) that contains both instructions
and data. It is not essential to have a single
memory unit, but it shows an alternative
design of the datapath.
�
11 . Intermediate registers are necessary
In each cycle, a fraction of the instruction is
executed
Five stages of instruction execution
Cycle 1. Instruction fetch and PC increment
!"#$%&'(&&)%*+,-.&/012#%/&3204&56%&2%.,/5%2&3,$%&&&
Cycle 3 Performing an ALU computation
Cycle 4 Reading or writing (data) memory
Cycle 5 Storing data back to the register file
�
12 .Why intermediate registers?
Sometimes we need the output of a
functional unit in a later clock cycle during
the execution of an instruction.
(Example: The instruction word fetched in stage 1
determines the destination of the register write in
stage 5. The ALU result for an address computation
in stage 3 is needed as the memory address for lw or
sw in stage 4.)
These outputs must be stored in
intermediate registers for future use.
Otherwise they will be lost by the next
clock cycle.
(Instruction read in stage 1 is saved in Instruction
register. Register file outputs from stage 2 are saved
in registers A and B. The ALU output will be stored in
a register ALUout. Any data fetched from memory in
stage 4 is kept in the Memory data register MDR.)
�
13 .The Five Cycles of MIPS
(Instruction Fetch)
IR:= Memory[PC]
PC:= PC+4
(Instruction decode and Register fetch)
A:= Reg[IR[25:21]], B:=Reg[IR[20:16]]
ALUout := PC + sign-extend(IR[15:0]]
(Execute|Memory address|Branch completion)
Memory reference: ALUout:= A+ IR[15:0]
R-type (ALU): ALUout:= A op B
Branch: if A=B then PC := ALUout
(Memory access | R-type completion)
LW: MDR:= Memory[ALUout]
SW: Memory[ALUout]:= B
R-type: Reg[IR[15:11]]:= ALUout
(Writeback)
LW: Reg[[20:16]]:= MDR
�