展开查看详情
3 . beeren flower
彩色纹理图像
food water
�
4 . 1 纹理( Texture )
目前对于纹理的精确定义还未形成统一认识,
多根据应用需要做出不同定义.
两种较常采用的定义:
定义 1 按一定规则对元素( elements )
或基元( primitives )进行排列所形成的重复
模式 .
定义 2 如果图像函数的一组局部属性是恒
定的,或者是缓变的,或者是近似周期性的,
则图像中的对应区域具有恒定的纹理.
�
5 . 纹理( Texture )
纹理的基本特征
纹理是区域属性,并且与图像分辨率(或
称尺度, resolution or scale )密切相
关
重复性 规则性 周期性 方向性
�
6 . 空域滤波
局部模板法
设计一组具有频率选择性的模板,与
图像做卷积 .
局部矩法
以每一个像素为中心,计算局部窗口
内的矩特征值,形成特征图像 . 相当于
用一组模板对图像进行滤波 .
�
7 . 空域滤波
The filter bank used in texture analysis. Total of 48
filters: 36 oriented filters, with 6 orientations, 3 scales,
and 2 phases, 8 center-surround derivative filters and
4 low-pass Gaussian filters.
�
8 . Gabor 变换与小波变换
Gabor 变换(高斯窗口)
Fw u, b f x w x b e j 2ux dx
(D. Gabor,
1946)
• 小波变换:
窗口宽度随频率变化而变化
1 x b
W f ,a u, b f xh
dx
a
a
�
9 . Gabor 变换纹理特征
二维 Gabor 滤波器具有频率和方向选择
性
Gabor 纹理特征提取的一般步骤:
1. 用不同尺度和方向的 Gabor 滤波器对图
像进行滤波,得到一组子图像;
2. 对各个子图像做一定处理;
3. 根据子图像计算相应特征,形成特征矢
量或特征图像,比如子图像窗口内的标准差 .
�
10 .Gabor 变换纹
理特征示例:
(a) 纹理图像
(b) 滤波图像
(16,135
度)
(c) 滤波图像
(32,0
度)
(d) 特征图像
(b)
�
11 . 小波变换纹理特征
• 对图像作小波变换
, 分别得到水平和垂
直方向上的高频和低频
子图像,可以对低频子
图像或每个子图像再作
同样的变换 . 根据最
后得到的每个子图像计
算一个特征,如能量,
墒等,形成纹理特征矢
量.
�
12 . Markov 随机场
图像建模的重要工具,应用广泛.
(J. Besag, 1974)
预备知识(标注问题, labeling )
位 (site) 集合:
S 1,2,, m
标志 (label) 集合,位上可能发生事件
的集合,可以是连续的,也可以是离散的
:
Lc [ X l , X h ] R , Ld [l1 , l 2 , , l n ]
�
13 . Markov 随机场
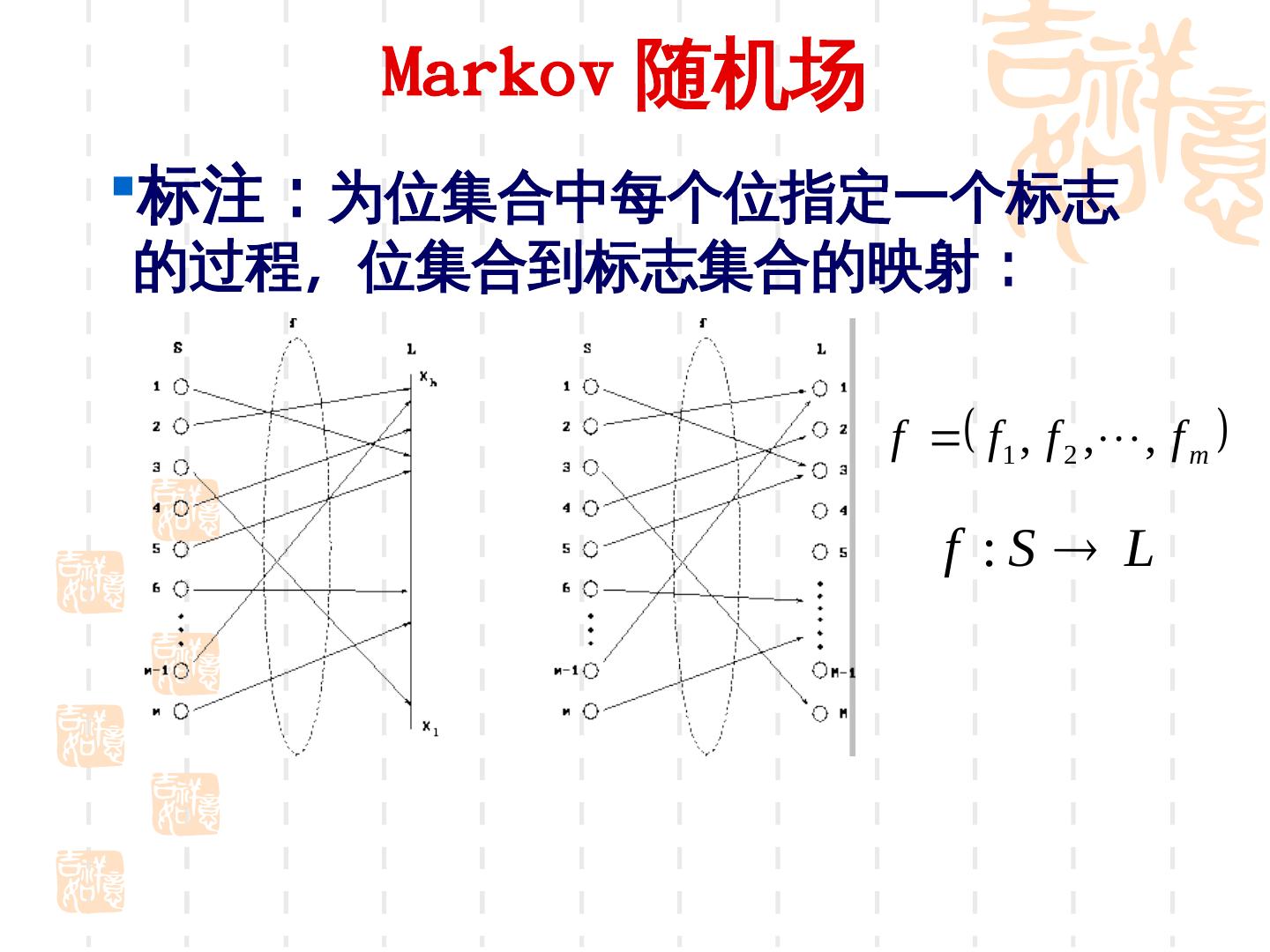
标注:为位集合中每个位指定一个标志
的过程,位集合到标志集合的映射:
f f 1 , f 2 , , f m
f :S L
�
14 . Markov 随机场
标注:从如下 空间中导出
F 的过程: f
m
F L1 L2 Lm , 当L1 L2 Lm 时, F L
在图象领域,可将 f 理解为一幅图象, F 则
是全部可允许图像的集合 .
•标注也被称为着色 (coloring ,数学规
划 ) 或配置 (configuration ,随机场 )
•如果各个位为随机变量,则位集合 S
称为随机场 .
�
15 . Markov 随机场
在随机场中,从 导出F 的过程就是确定
f
出现的概率 . f
假设各个位的标注是彼此无关的,则有
P ( f ) P f i , P ( f i f i ) P f i
只需单独考虑每个位,问题简单(理想)
• 实际应用时,需要考虑上下文约束
(contextual constraints) Markov 随机
场
�
16 . Markov 随机场
当且仅当以下两个条件满足时,随
机场为 Markov 随机场:
P f 0 正性( Positivity )
P f i f S i P f i f Ni Markov 性
(Markovianity)
•若 fi 能够独立发生,那么 f 就能够发生
•一个像素点的随机概率只与它邻域的像
素有关
�
17 .根据矩阵中各位置与位置 i 的距离,可以将邻域系统表
达为等级形式
邻域系统的等级划分
一个象素点和图像中其他各象素点的相关性就可以通过条
件概率和邻域系统来描述
�
18 . Gibbs 随机场
邻域系统 (neighboring system)
邻域集 (neighbor set) :
一阶邻域(四连通),二阶邻域(八连通)等
团 (cliques) :
由邻域关系限定的位子集
单位团 (single-site) ,双位团 (pair-
site) ,三位团 (triple-site) 等
C1 i , C2 i, i , C3 i, i, i , i, i, i互为邻居
团是有序的 : i, i i , i
�
19 . Gibbs 随机场
邻域
团
团具有尺寸 ,
形状和方向
�
20 . Gibbs 随机场
当且仅当随机场的配置服从 Gibbs 分布时
,称为 Gibbs 随机场 :
1
1 TU f T :温度常量,常取 1
P f e
z 1
U f 规范化常量,称为划分函数
Z e T
f F
( partition function )
U f Vc f 所有团势能之和,称为能量函
cC 数 (energy function)
Vc f :团势能 (clique potential)
�
21 . Gibbs 随机场
物理意义
配置的能量越小,其概率越大
均匀性 (homogeneity) :
Vc f 与团在随机场中的位置无关
或者说,P f i f N i 与位 i 无
关
• 各向同性 (isotropic) :
Vc f 与团的方向无关
• 在纹理领域, Markov(Gibbs) 随机场
具
有均匀性
�
22 . Gibbs 随机场
Hammersley-Clifford 定理
Markov 随机场与 Gibbs 随机场等价
意义:
既可以用局部成分的相互影响来建模,也可
以用全局能量来建模 .
如何确定团势能的形式和参数是
Markov(Gibbs) 随机场的主要工作 .
划分函数的计算复杂度很高,是一个难题
,实际多做一定简化 .
�
23 . 3 从纹理恢复形状
根据纹理属性变化与表面形状的关
系恢复表面形状 .
• 三种效应:
透视缩小 ( 与表面方向有
关)
缩放和密度变化 ( 与观察
者 和纹理基元的距离有关 )
•基准维
(characteristic
dimension) :
没有发生透视缩小的方向
�
24 . 3. 从纹理恢复形状
几种方法
Bajcsy-Lieberman 方法:利用基元尺
寸梯度,求相对深度 ;
Witken 方法:利用边缘方向分布,估
计表面方向 ;
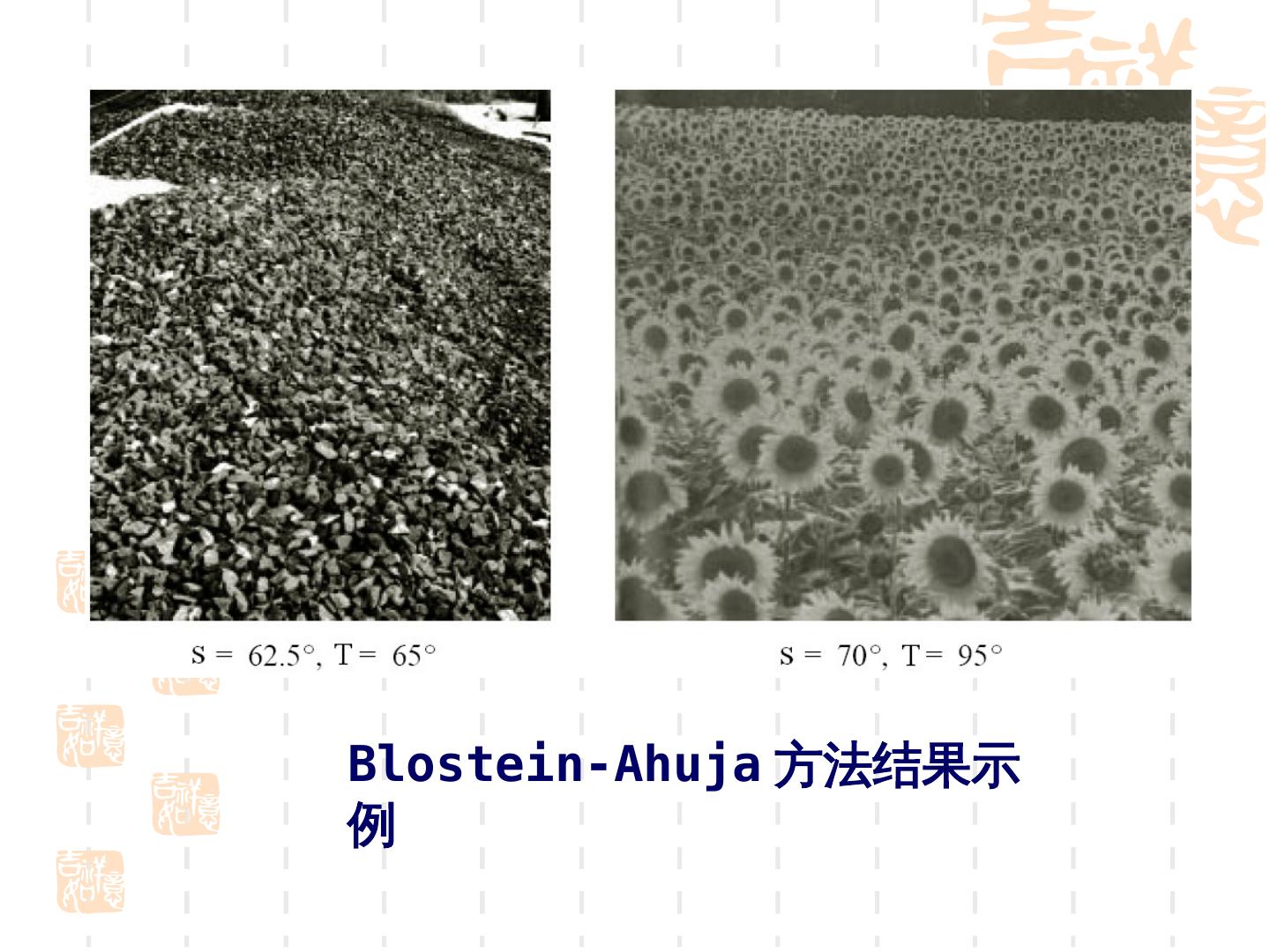
Blostein-Ahuja 方法:利用基元面积
梯度,估计表面方向 .
�
25 .椭圆长短轴在缩小(缩放效应)
缩小速度长轴为线性,短轴为二次(透视缩小效
应,长轴方向为基准维)
�
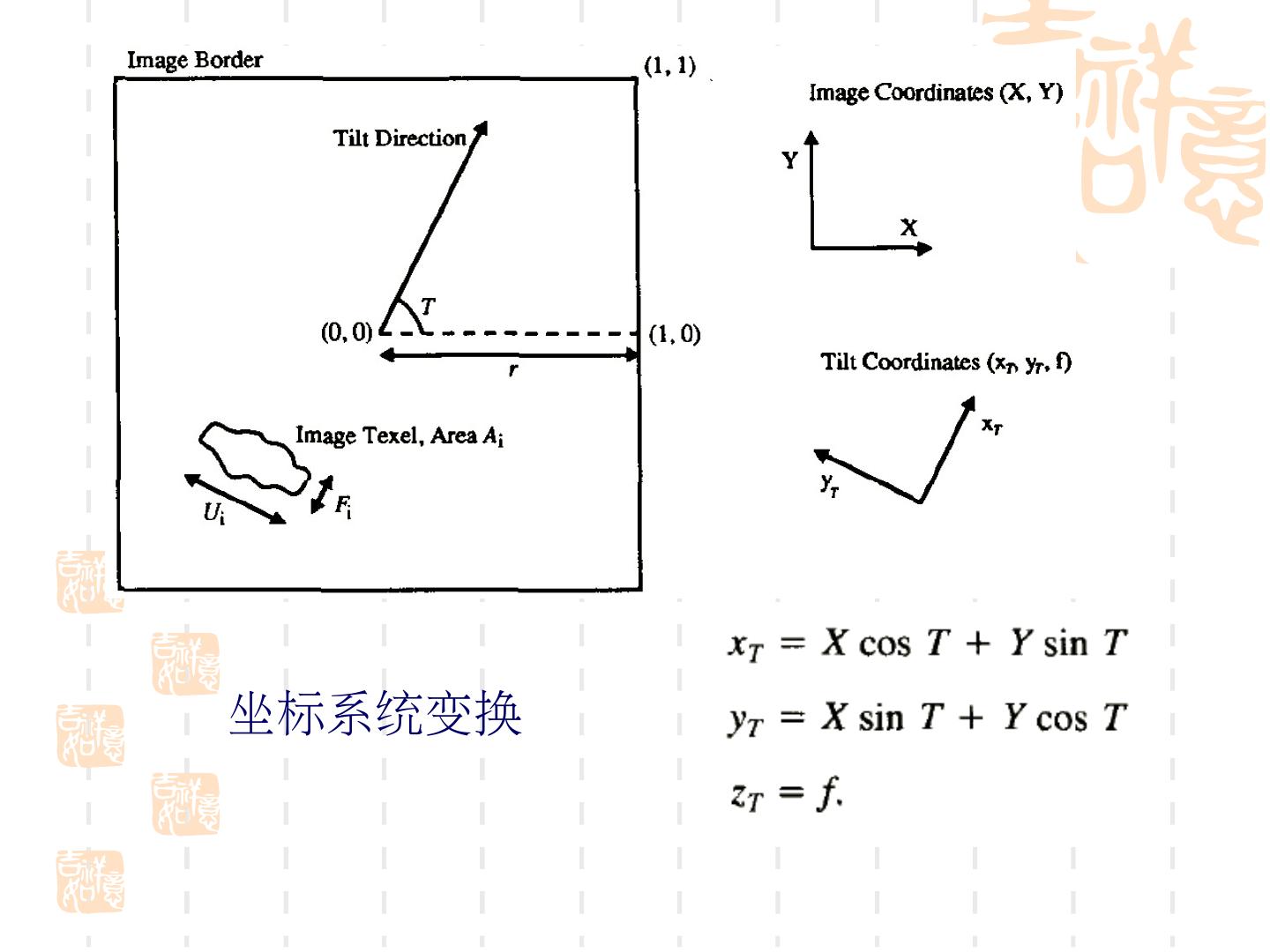
26 . Blostein-Ahuja 方法
假设表面为平面,纹理基元单一且无深度差
恢复公式(依据)的推导
1. 为简化推导,将坐标系统转换到 tilt 方向
2. 根据透视投影模型,建立任意基元长短轴
与中心基元长短轴的长度关系;
3. 将上述关系转化为任意基元与中心基元的
面积关系 .
�
29 . Blostein-Ahuja 方法
形成表面方向估计依据
→
为未知参数空间,根据纹理图像
从中搜索最佳结果:
将该空间离散化,对于每组值,计算图像中
各个位置上的纹理基元面积,与实际面积比较,获
得拟合度,取最佳拟合度对应的结果 . ( 表面拟
合)
�