








- 快召唤伙伴们来围观吧
- 微博 QQ QQ空间 贴吧
- 文档嵌入链接
- 复制
- 微信扫一扫分享
- 已成功复制到剪贴板
基于运动视觉的稠密估计
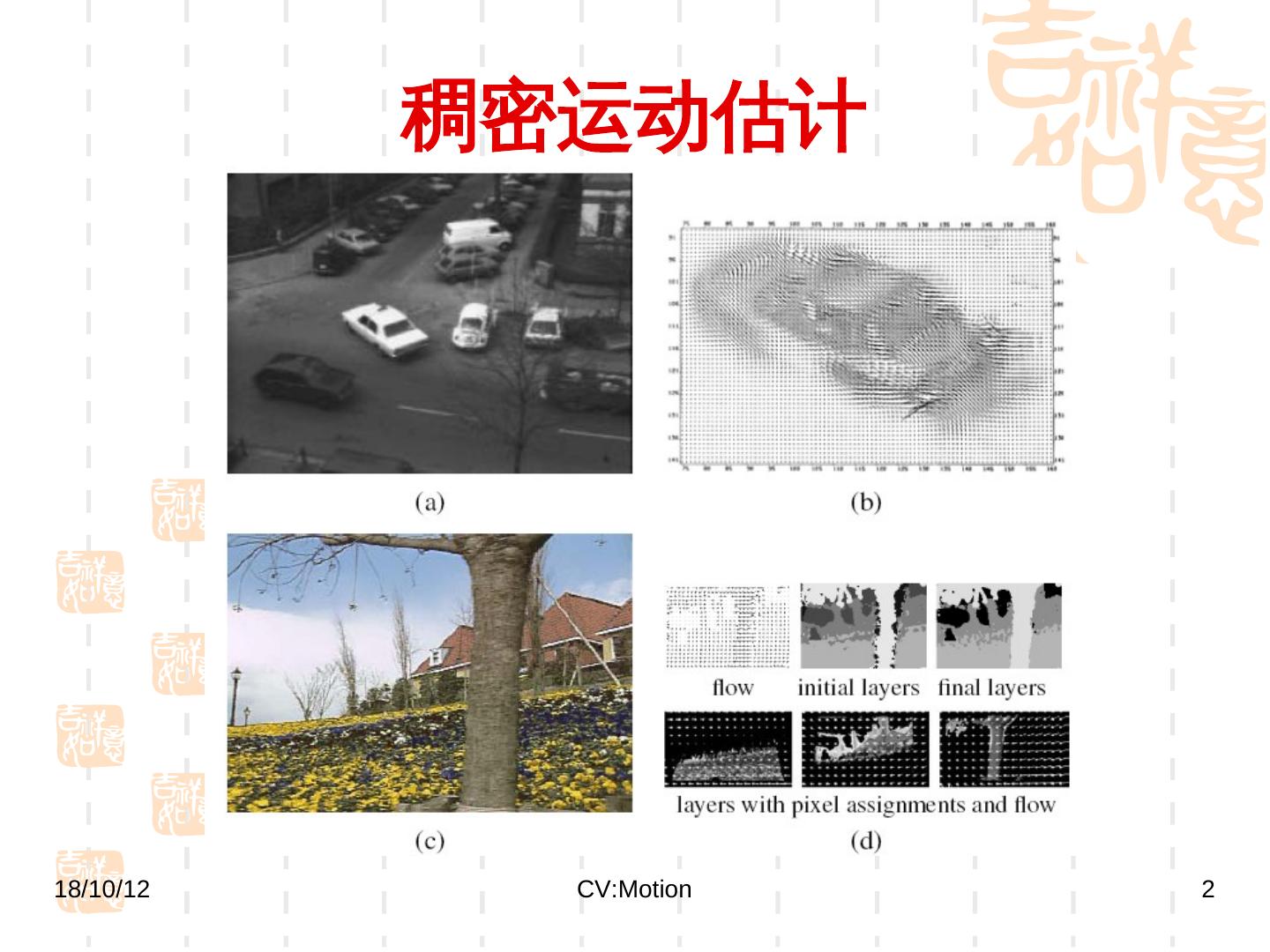
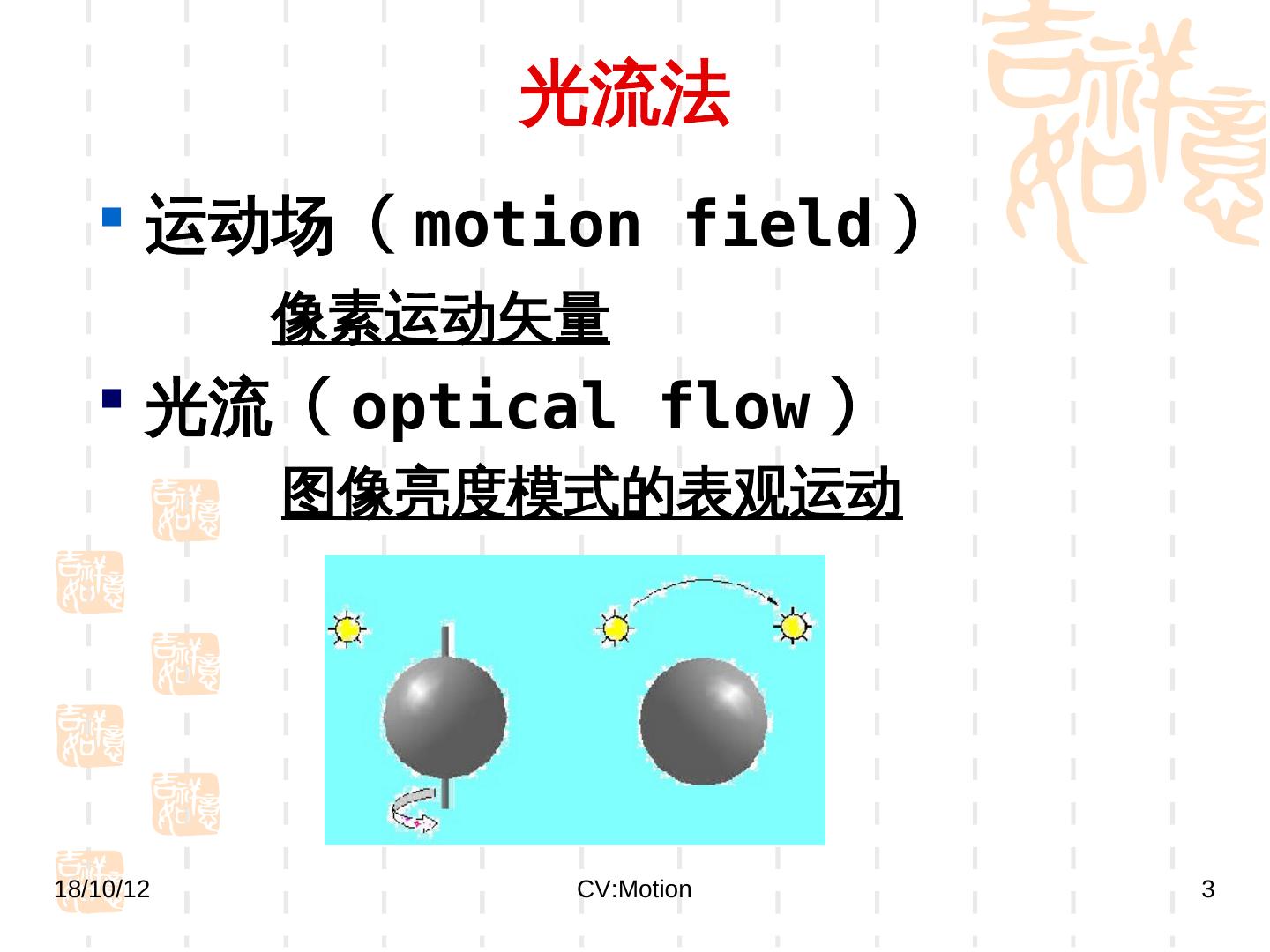
本章介绍光流法(Optical Flow)一种基于运动视觉的稠密估计方法,光流是指图像亮度模式的表观运动,通过根据图像亮度模式的变化估计物体的运动的方法称为光流法,在二维光流运动估计中主要介绍基于梯度的方法、块匹配方法,包括方法的应用与改进。
展开查看详情
1 .第八章 基于运动视觉的稠密估计 -------- 光流法 (OpticalOptical Flow))
2 . 稠密运动估计 18/10/12 CV:Motion 2
3 . 光流法 运动场( motion field ) 像素运动矢量 光流( optical flow ) 图像亮度模式的表观运动 18/10/12 CV:Motion 3
4 .18/10/12 CV:Motion 4
5 . 8.1 二维光流运动估计 根据图像亮度模式的变化估计物体的运 动 1. 基于梯度的方法 (Gradient-Gradient- based) Differential Methods 2. 块匹配方法 (Gradient-Block Matching)) Reg)ion Matching) 18/10/12 CV:Motion 5
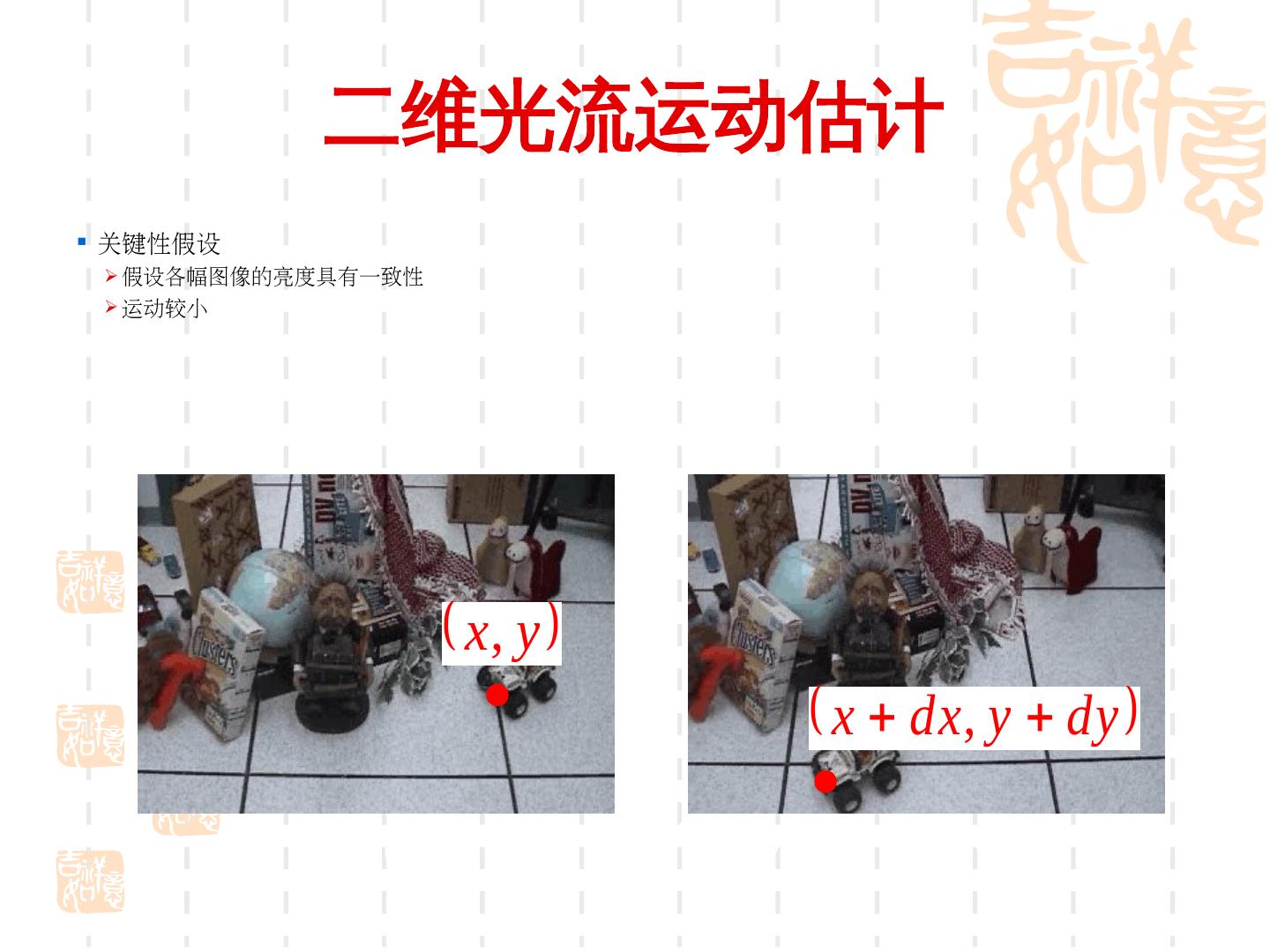
6 . 二维光流运动估计 关键性假设 假设各幅图像的亮度具有一致性 运动较小 Time = t Time = t+dt x, y x dx , y dy I 0 ( x , y , t ) I1 ( x x , y y , t t )
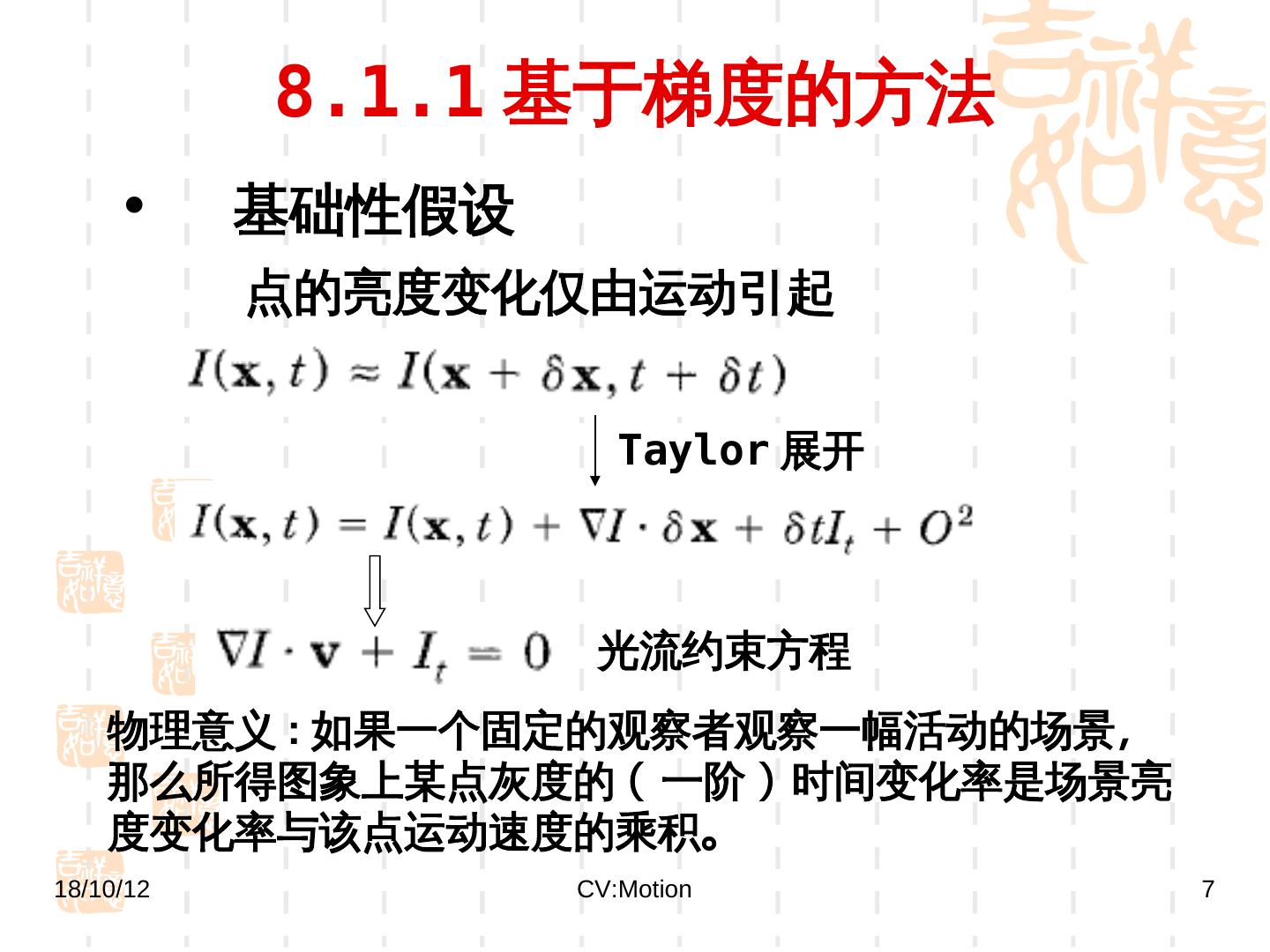
7 . 8.1.1 基于梯度的方法 • 基础性假设 点的亮度变化仅由运动引起 Taylor 展开 光流约束方程 物理意义 : 如果一个固定的观察者观察一幅活动的场景, 那么所得图象上某点灰度的 ( 一阶 ) 时间变化率是场景亮 度变化率与该点运动速度的乘积。 18/10/12 CV:Motion 7
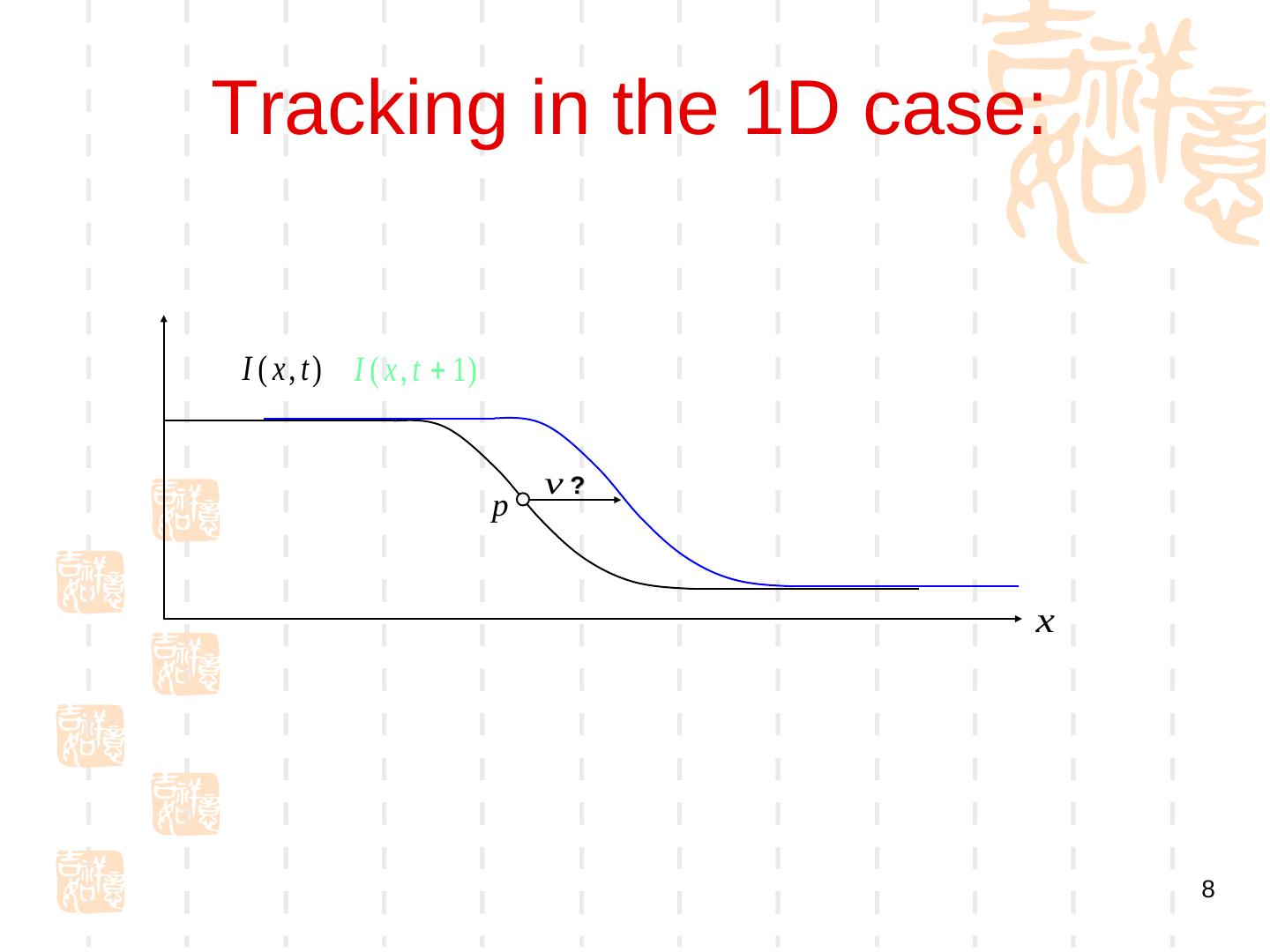
8 .Tracking in the 1D case: I ( x , t ) I ( x , t 1) v? p x 8
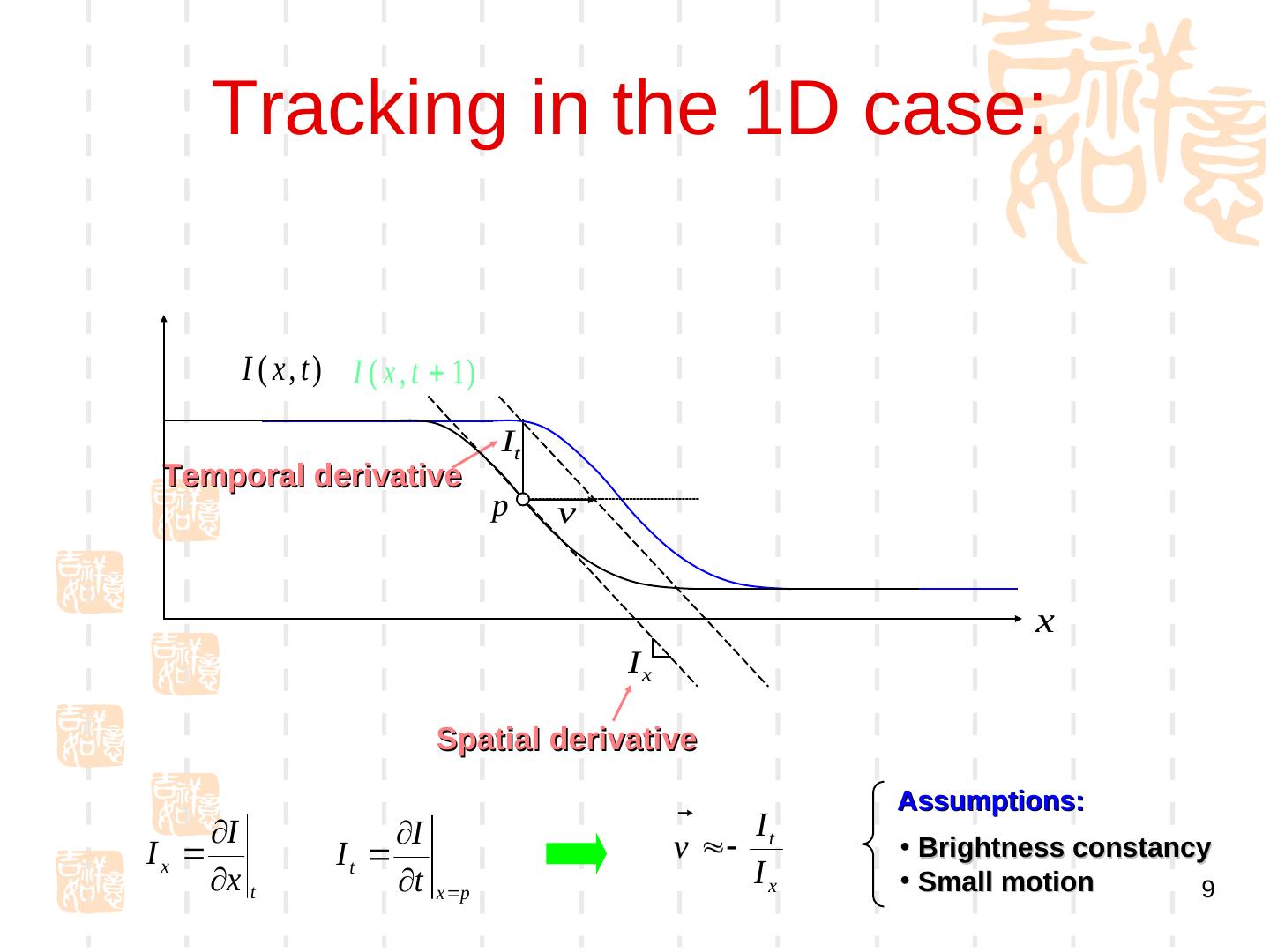
9 . Tracking in the 1D case: I ( x , t ) I ( x , t 1) It Temporal derivative p v x Ix Spatial derivative Assumptions: I I I Ix It v t • Brightness constancy x t t x p Ix • Small motion 9
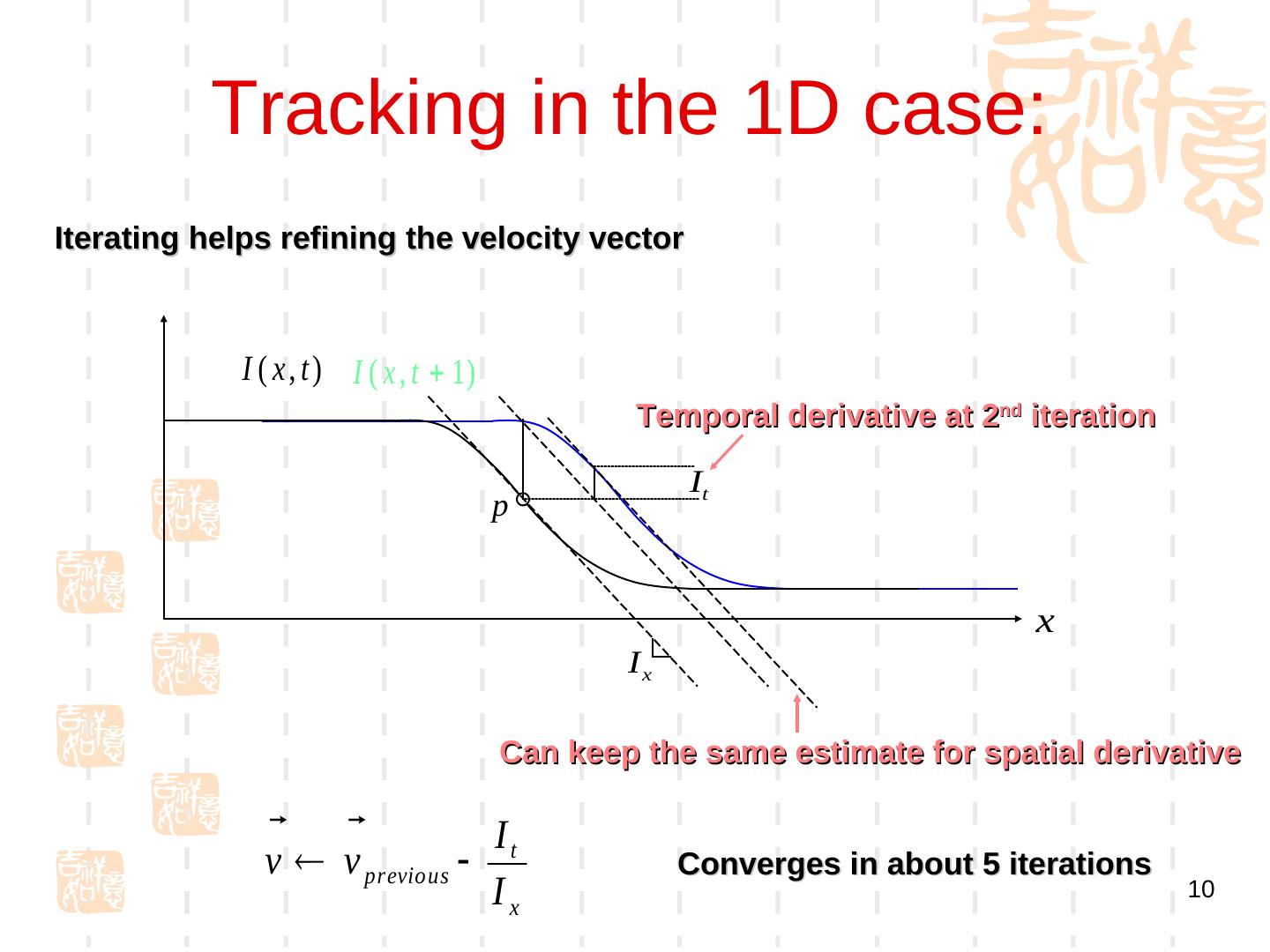
10 . Tracking in the 1D case: Iterating helps refining the velocity vector I ( x , t ) I ( x , t 1) Temporal derivative at 2nd iteration It p x Ix Can keep the same estimate for spatial derivative I v v previous t Converges in about 5 iterations Ix 10
11 .孔径问题 (Gradient-Aperture problem) 11
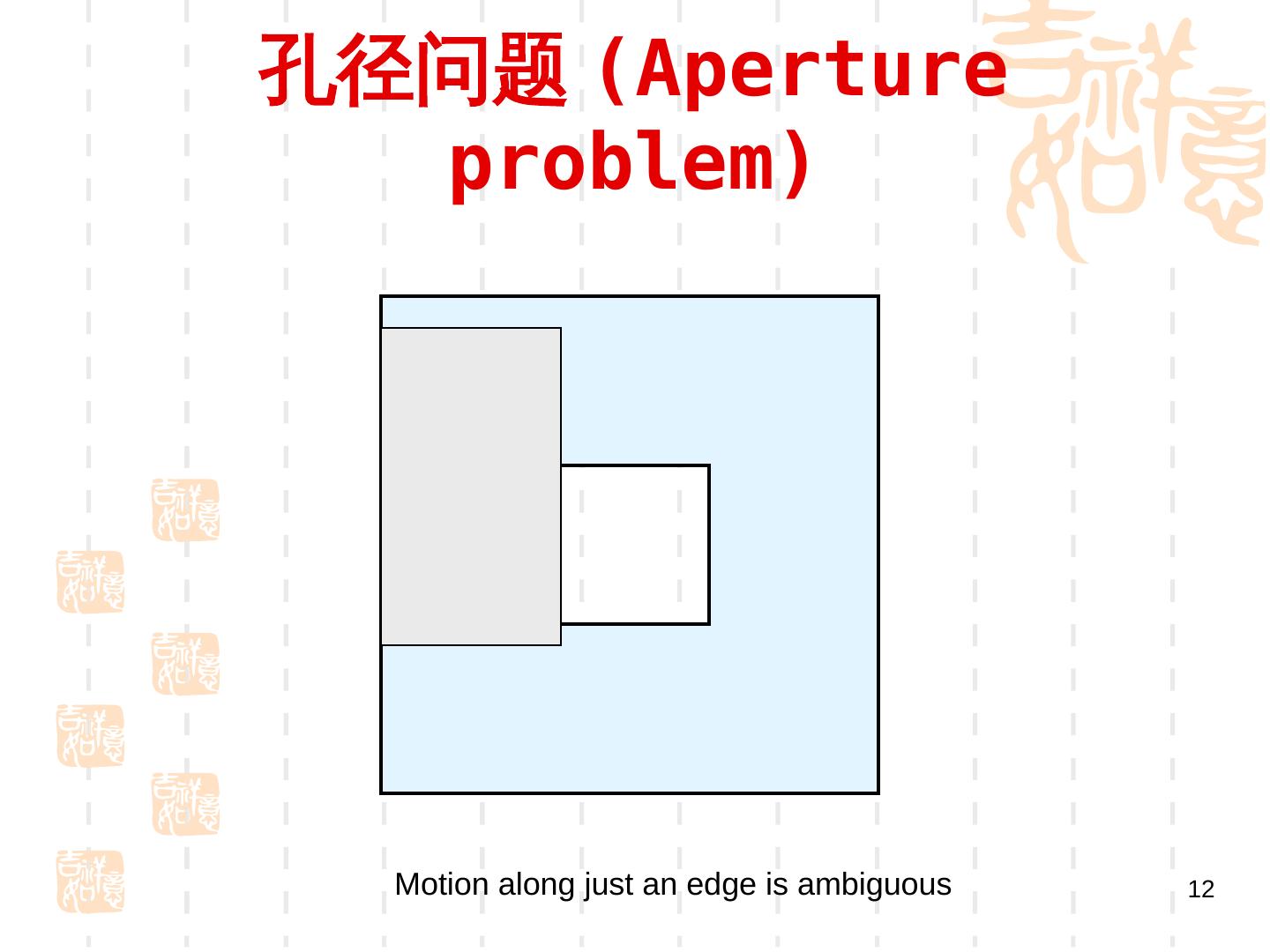
12 .孔径问题 (Gradient-Aperture problem) Motion along just an edge is ambiguous 12
13 .孔径问题 (Gradient-Aperture problem) 13
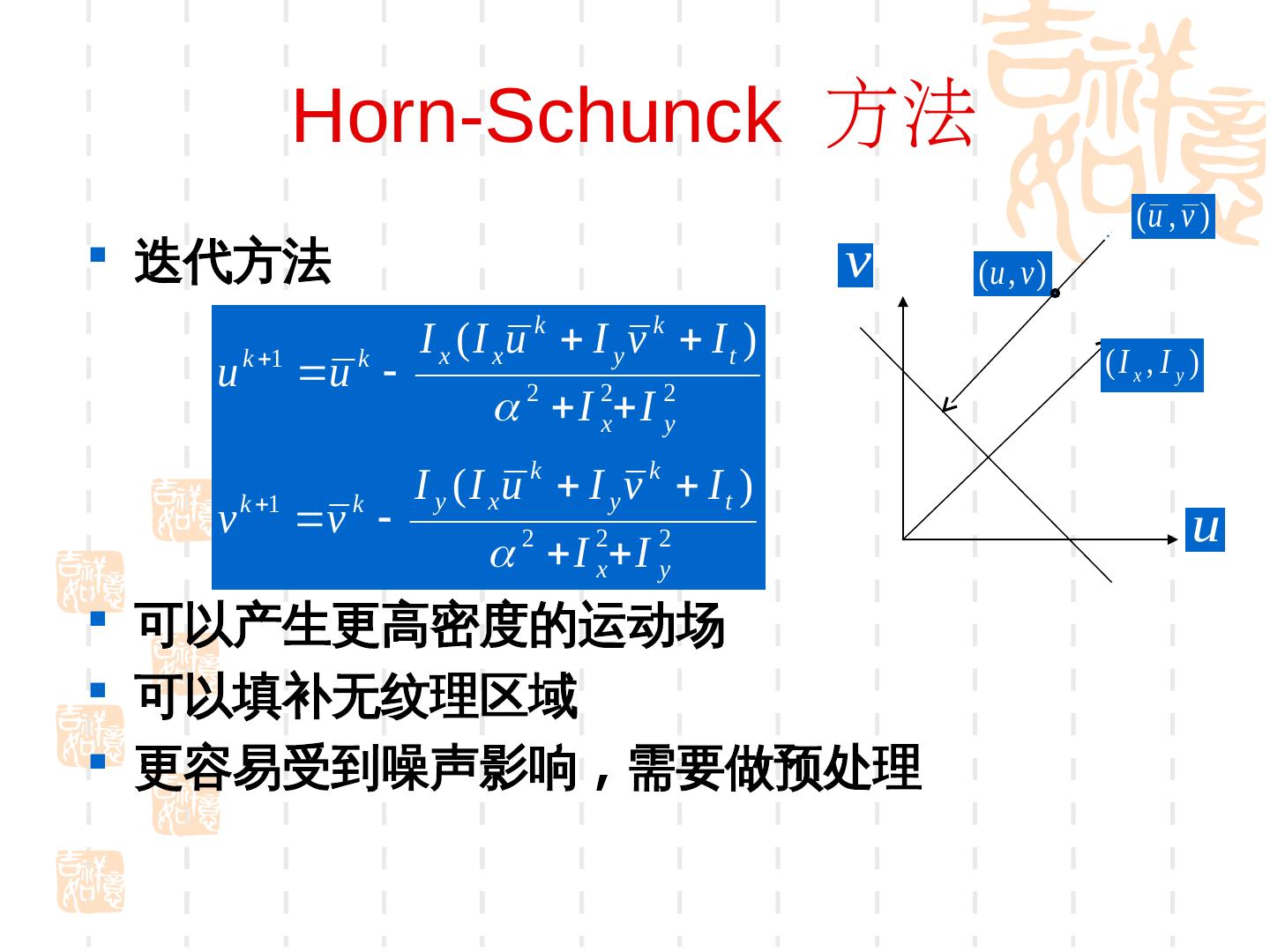
14 . 孔径问题 (Gradient-Aperture problem) • 需要足够的图像梯度信息,才能进行准确的估 计 •对于无纹理区域或者沿着边缘方向无法使用 •只能在角点和纹理区域使用 • 图像中的每一点上有两个未知数 u 和 v ,但 只有一个方程,因此,只使用一个点上的信息是不 能确定光流的. •最优化问题 , 迭代求解 •增加约束,使问题可解 18/10/12 CV:Motion 14
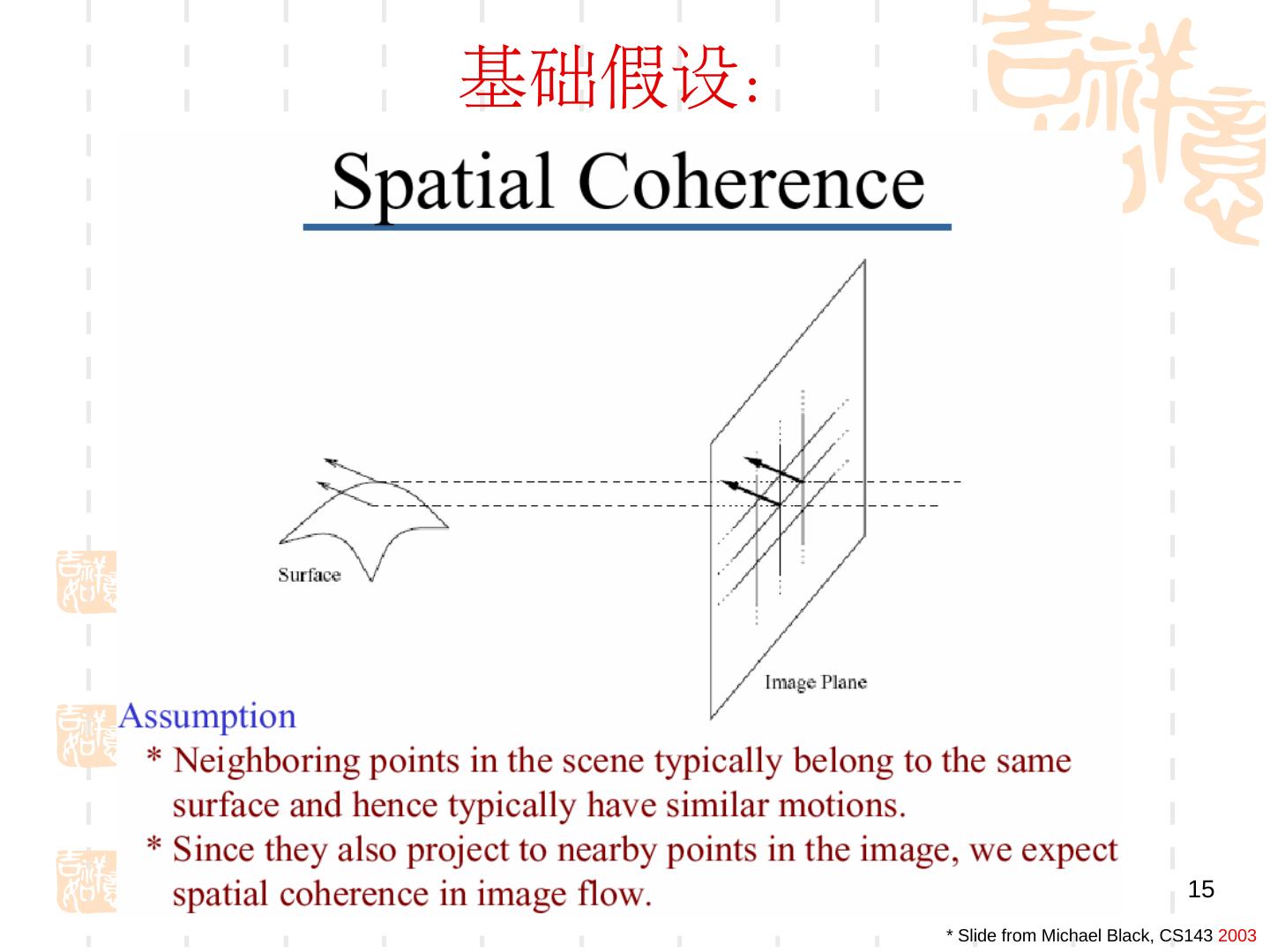
15 .基础假设: 15 * Slide from Michael Black, CS143 2003
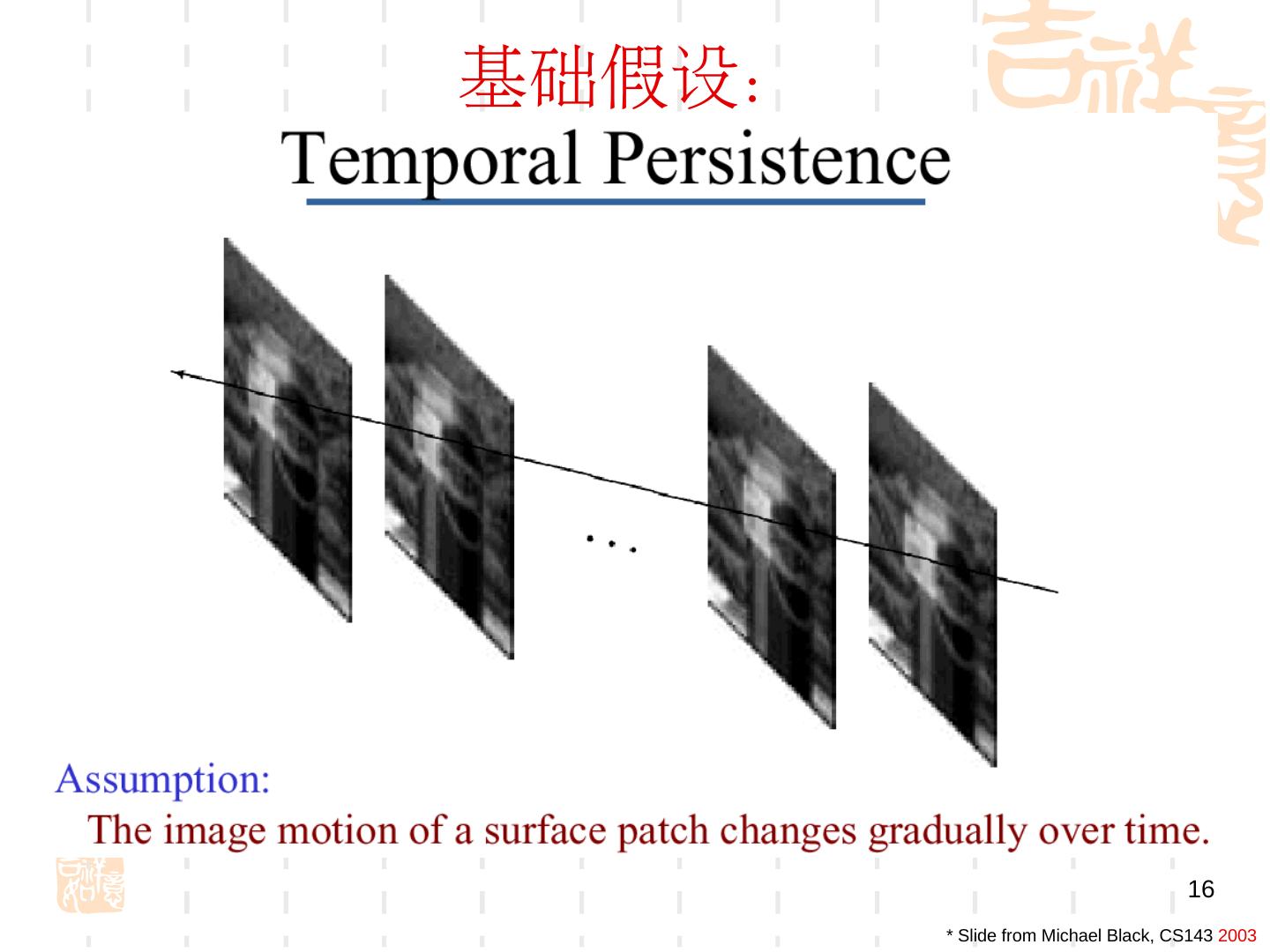
16 .基础假设: 16 * Slide from Michael Black, CS143 2003
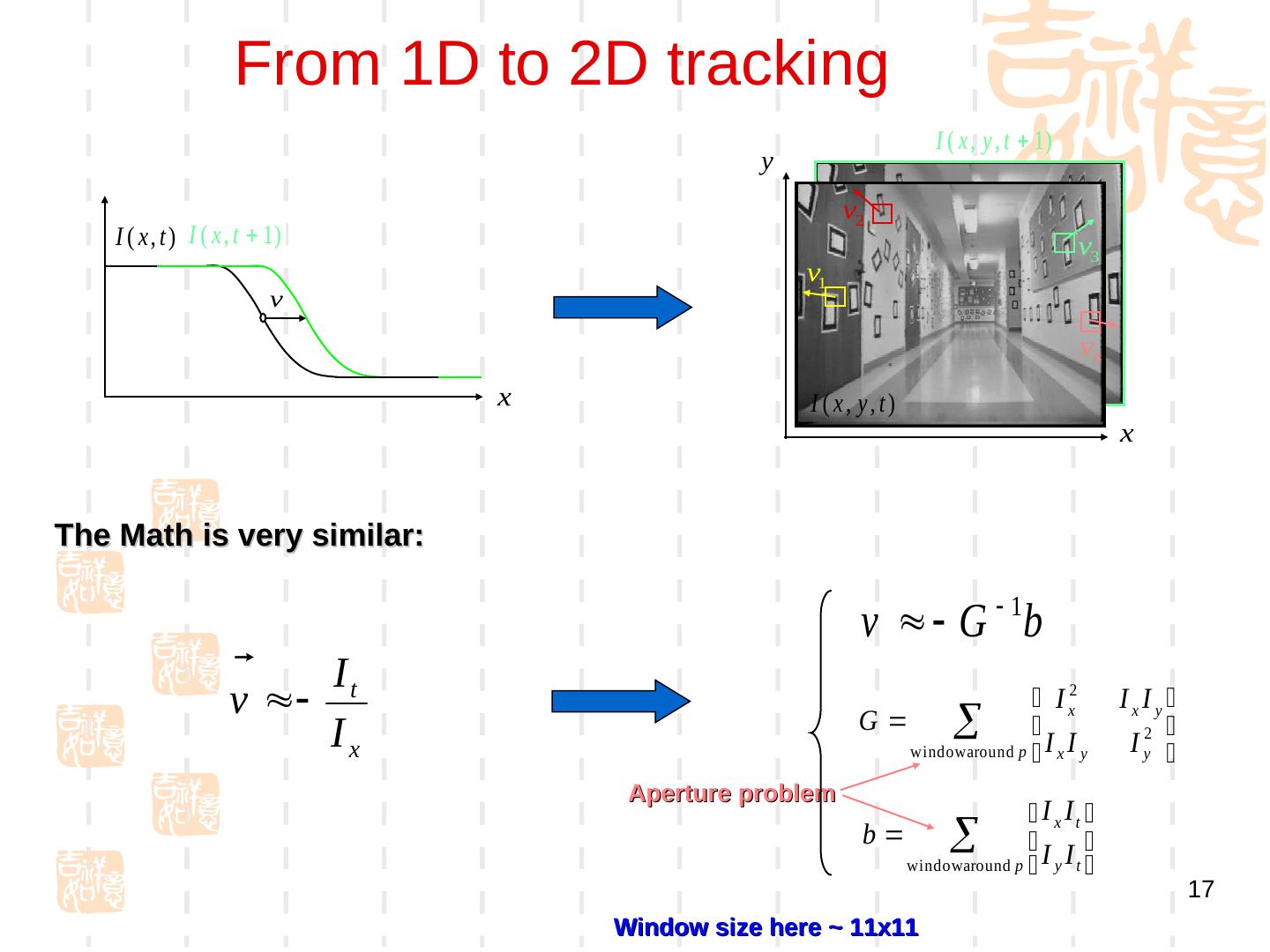
17 . From 1D to 2D tracking I ( x , y , t 1) y v2 I ( x , t ) I ( x , t 1) v3 v1 v v4 x I ( x, y, t) x The Math is very similar: v G 1b It v I x2 IxIy Ix G window around p I x I y I y2 Aperture problem I x It b window around p I y I t 17 Window) size here ~ 11x11
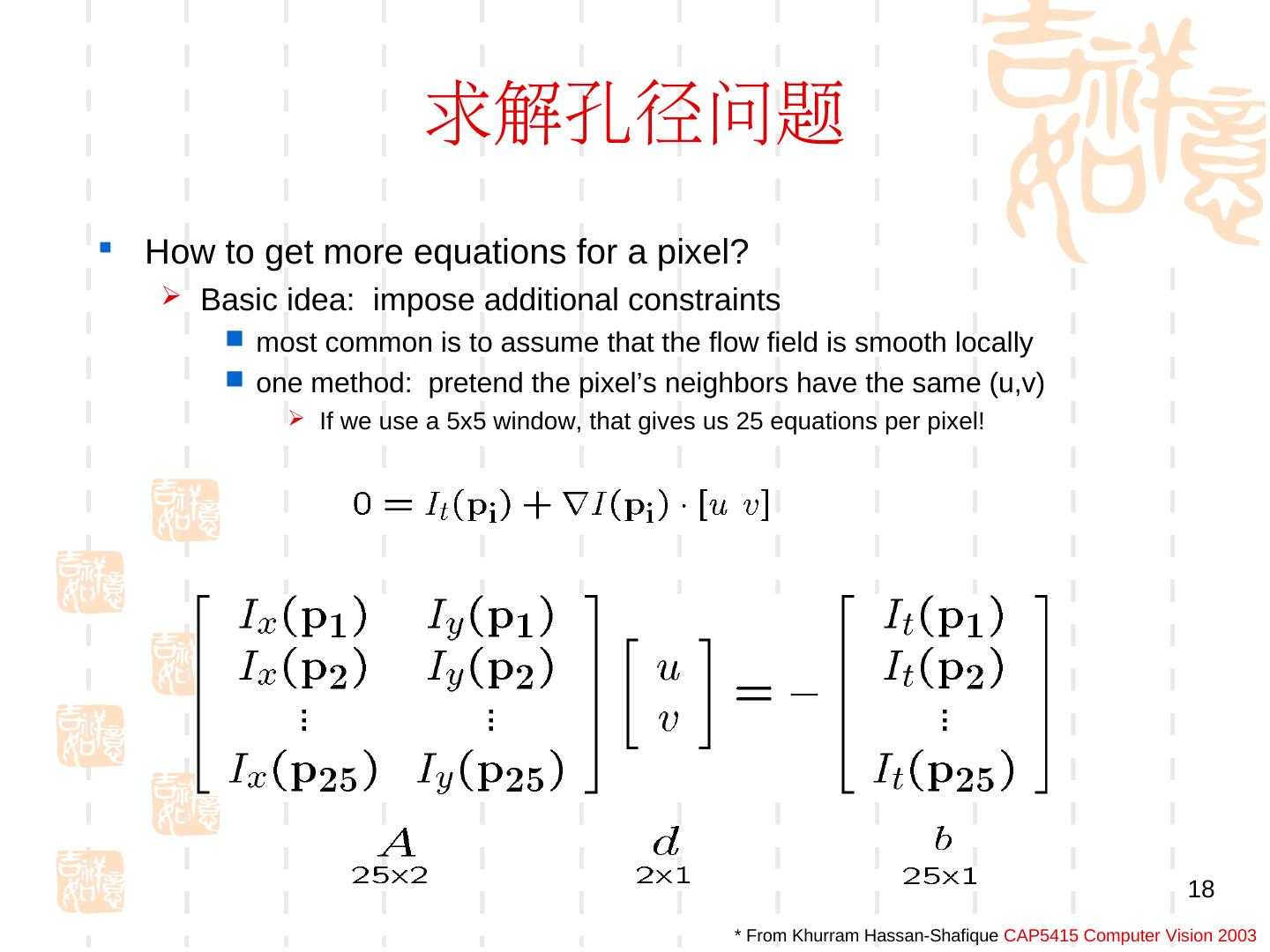
18 . 求解孔径问题 How to get more equations for a pixel? Basic idea: impose additional constraints most common is to assume that the flow field is smooth locally one method: pretend the pixel’s neighbors have the same (u,v) If we use a 5x5 window, that gives us 25 equations per pixel! 18 * From Khurram Hassan-Shafique CAP5415 Computer Vision 2003
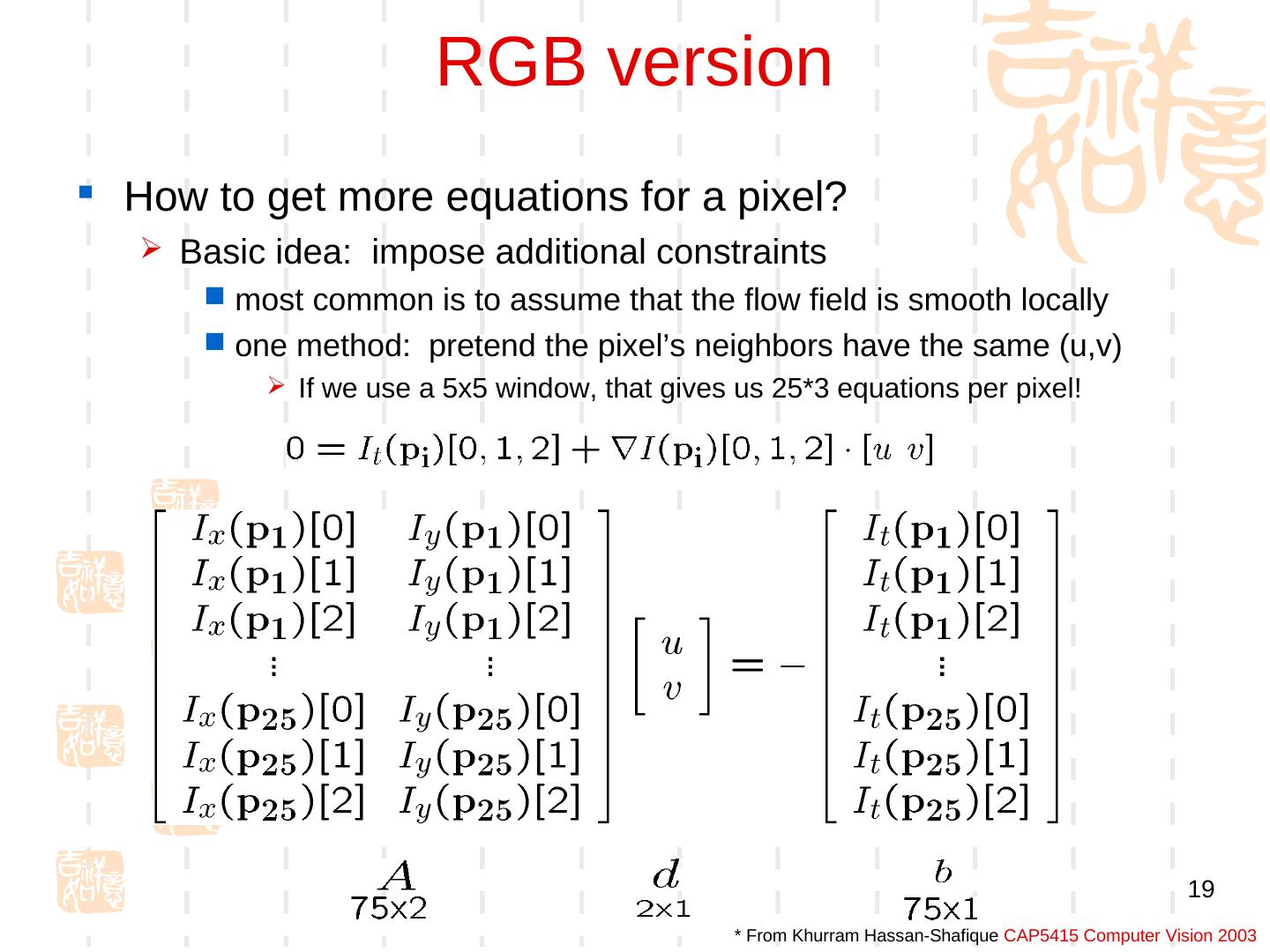
19 . RGB version How to get more equations for a pixel? Basic idea: impose additional constraints most common is to assume that the flow field is smooth locally one method: pretend the pixel’s neighbors have the same (u,v) If we use a 5x5 window, that gives us 25*3 equations per pixel! 19 * From Khurram Hassan-Shafique CAP5415 Computer Vision 2003
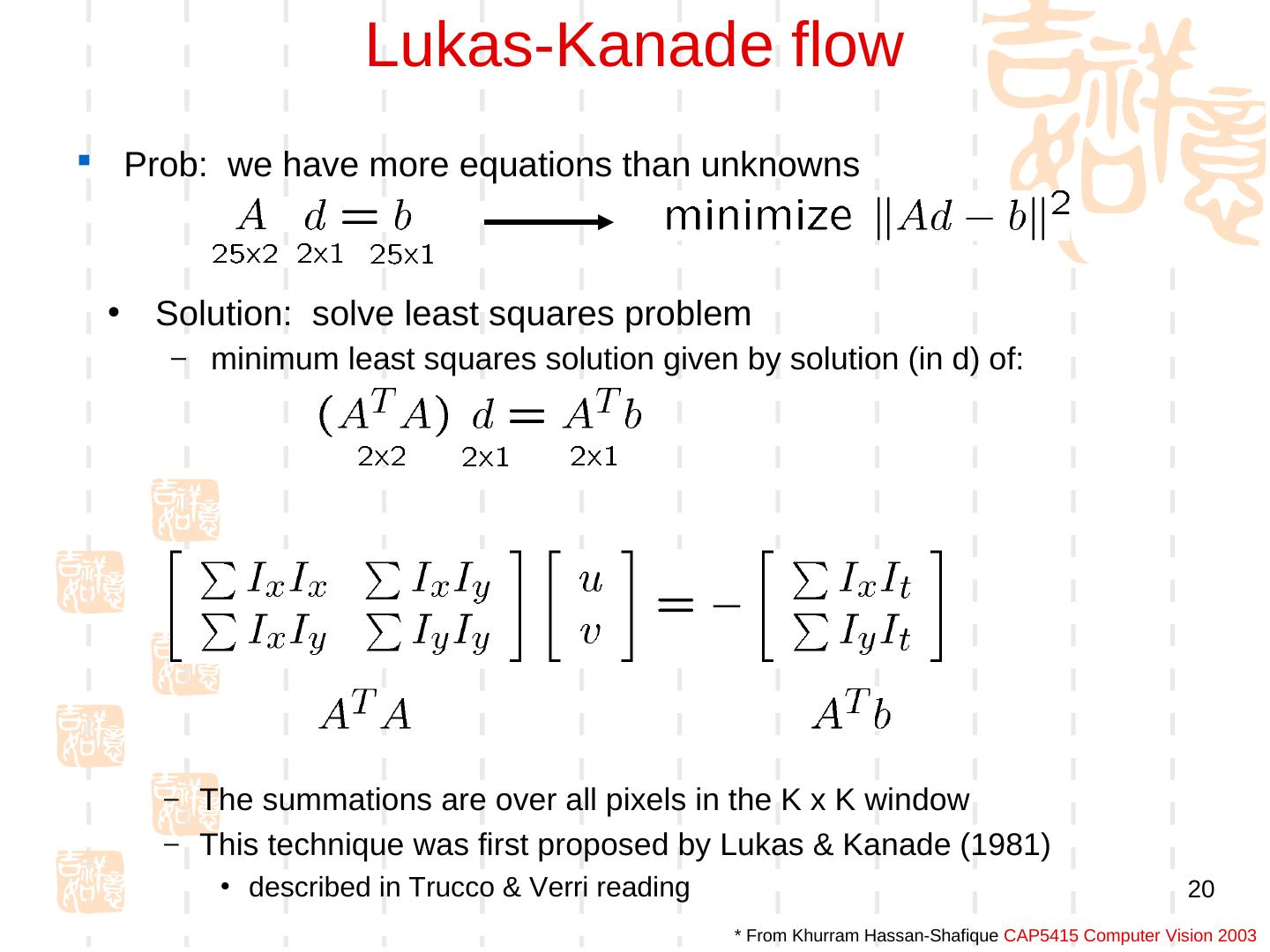
20 . Lukas-Kanade flow Prob: we have more equations than unknowns • Solution: solve least squares problem – minimum least squares solution given by solution (in d) of: – The summations are over all pixels in the K x K window – This technique was first proposed by Lukas & Kanade (1981) • described in Trucco & Verri reading 20 * From Khurram Hassan-Shafique CAP5415 Computer Vision 2003
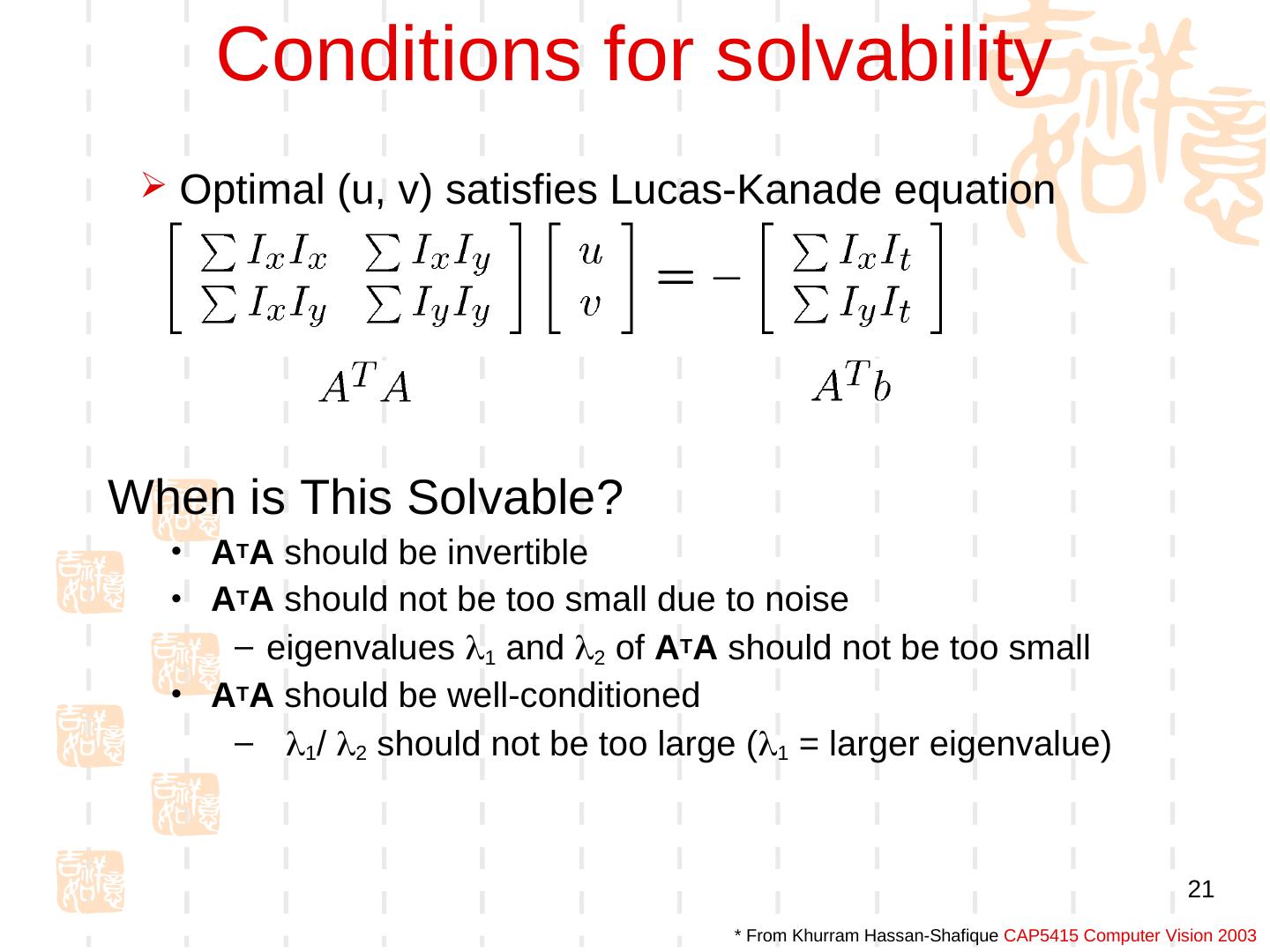
21 . Conditions for solvability Optimal (u, v) satisfies Lucas-Kanade equation When is This Solvable? • ATA should be invertible • ATA should not be too small due to noise – eigenvalues 1 and 2 of ATA should not be too small • ATA should be well-conditioned – 1/ 2 should not be too large (1 = larger eigenvalue) 21 * From Khurram Hassan-Shafique CAP5415 Computer Vision 2003
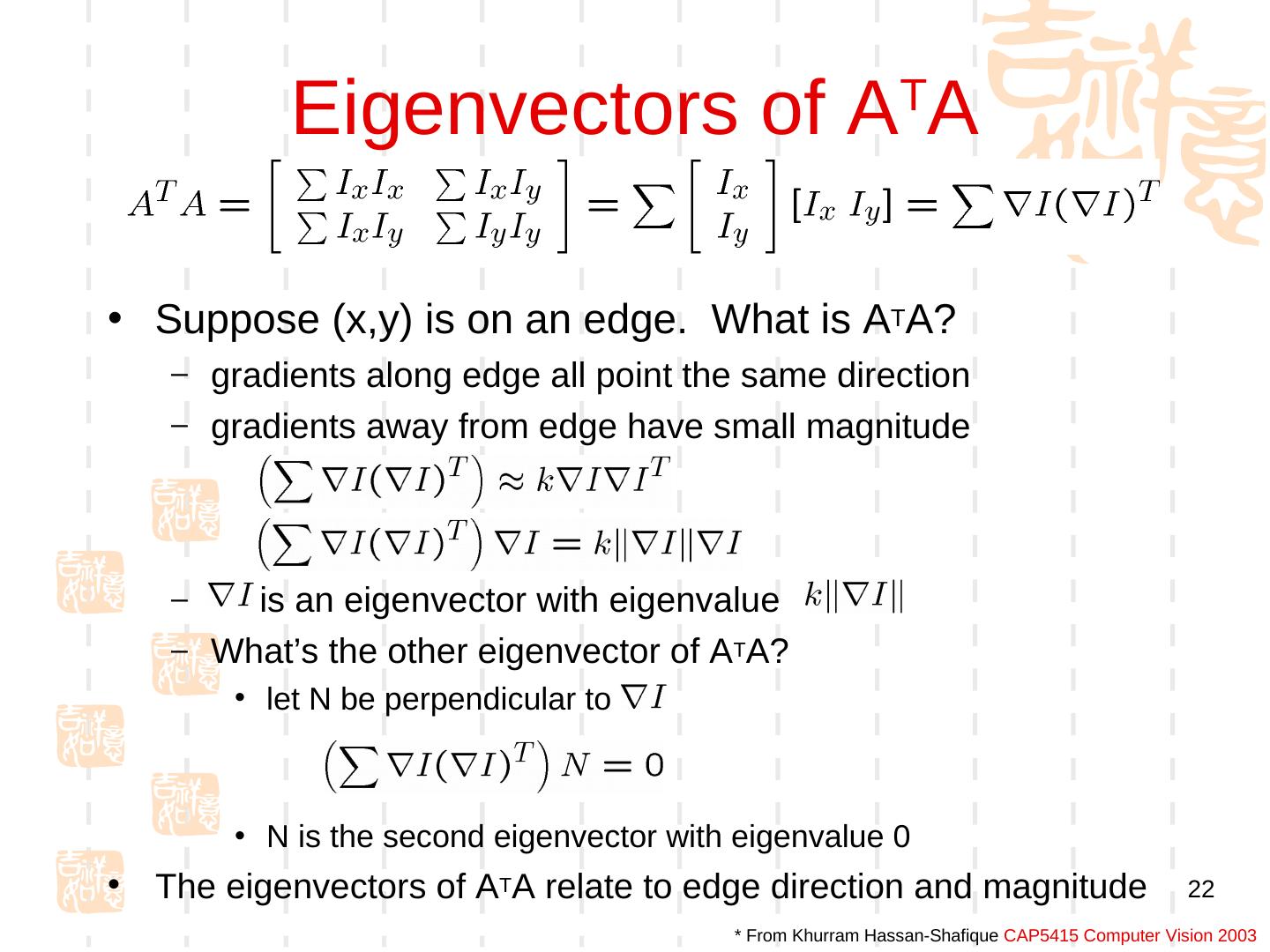
22 . Eigenvectors of A A T • Suppose (x,y) is on an edge. What is ATA? – gradients along edge all point the same direction – gradients away from edge have small magnitude – is an eigenvector with eigenvalue – What’s the other eigenvector of ATA? • let N be perpendicular to • N is the second eigenvector with eigenvalue 0 • The eigenvectors of ATA relate to edge direction and magnitude 22 * From Khurram Hassan-Shafique CAP5415 Computer Vision 2003
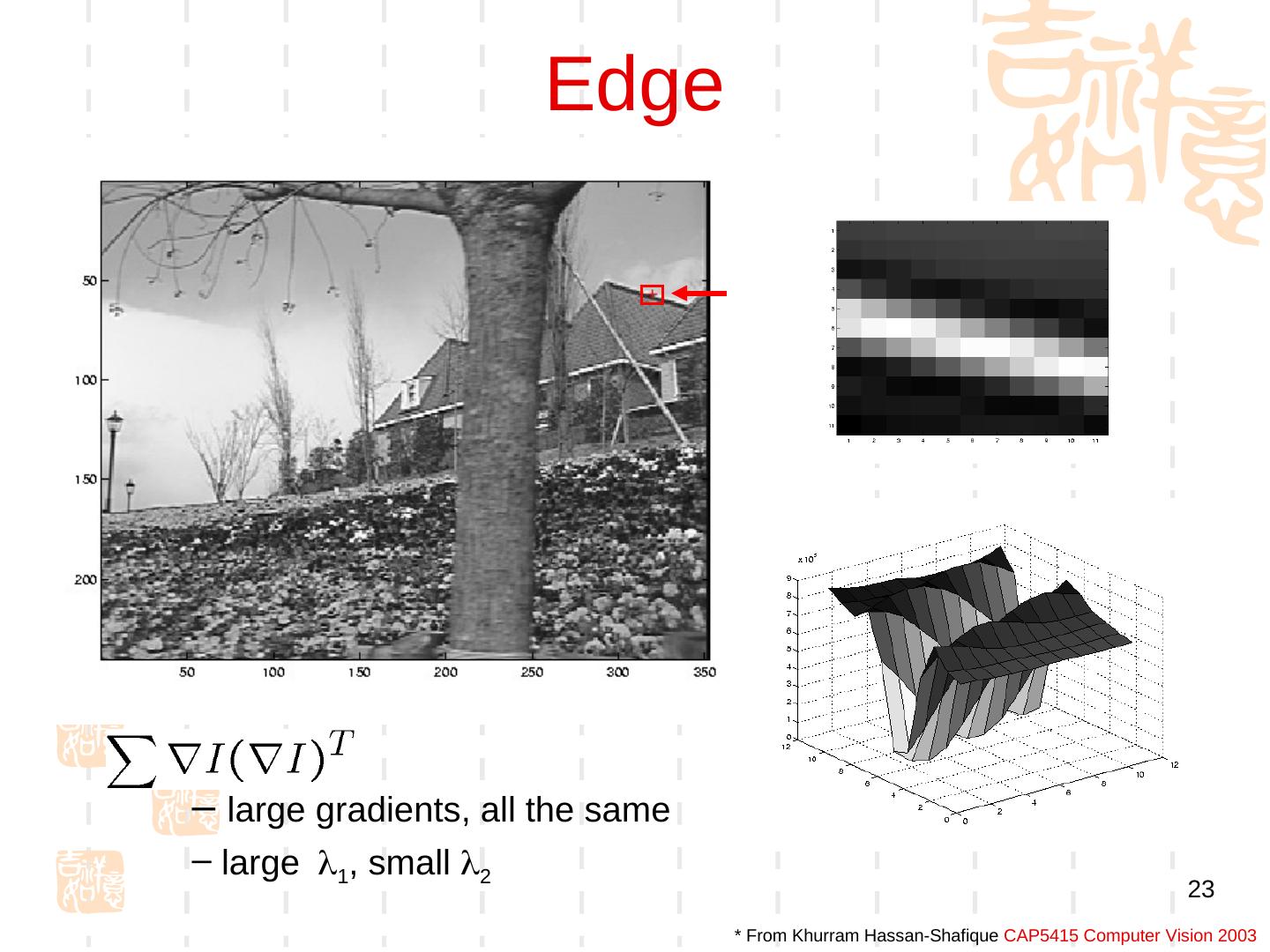
23 . Edge – large gradients, all the same – large1, small 2 23 * From Khurram Hassan-Shafique CAP5415 Computer Vision 2003
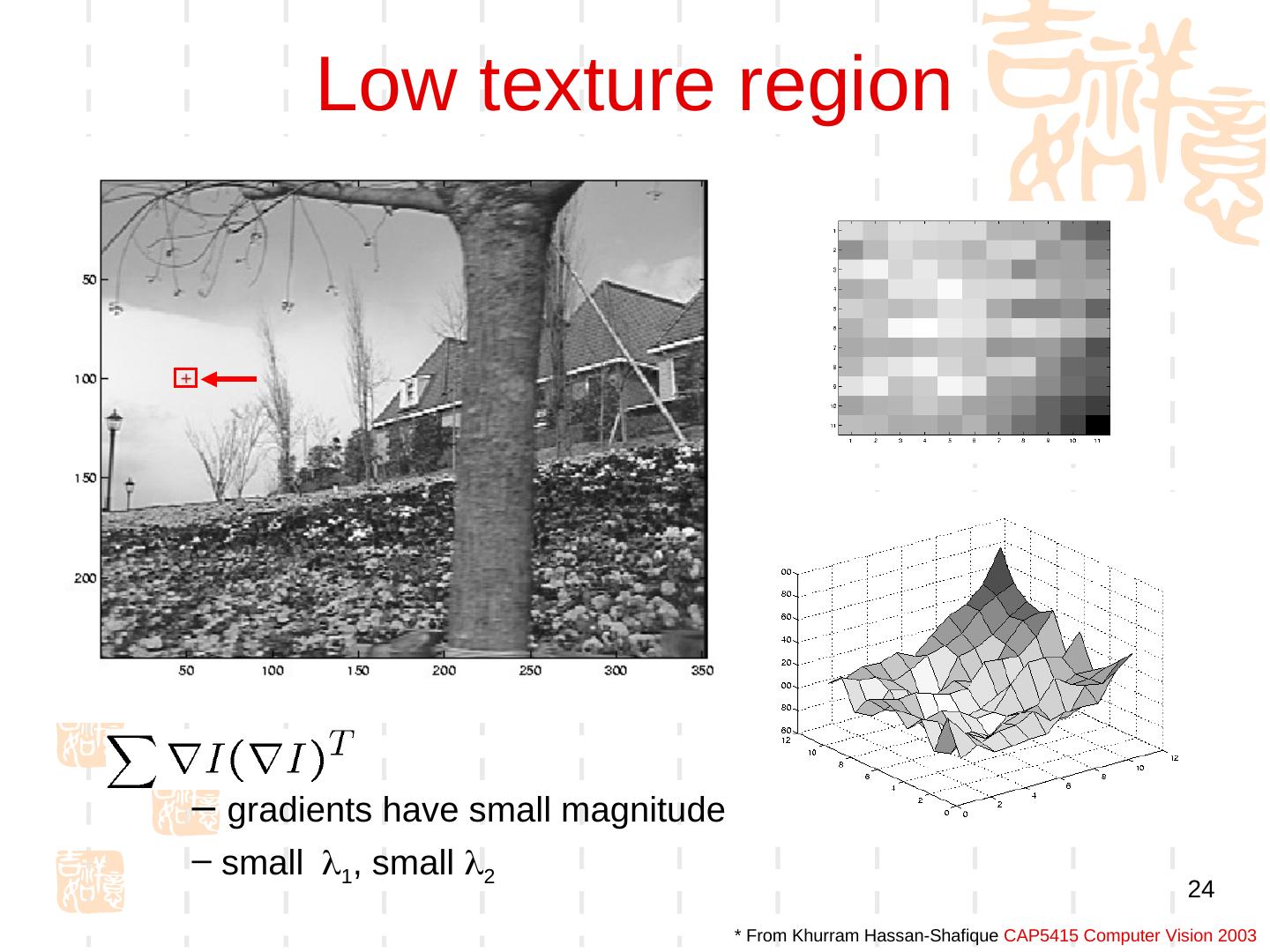
24 . Low texture region – gradients have small magnitude – small1, small 2 24 * From Khurram Hassan-Shafique CAP5415 Computer Vision 2003
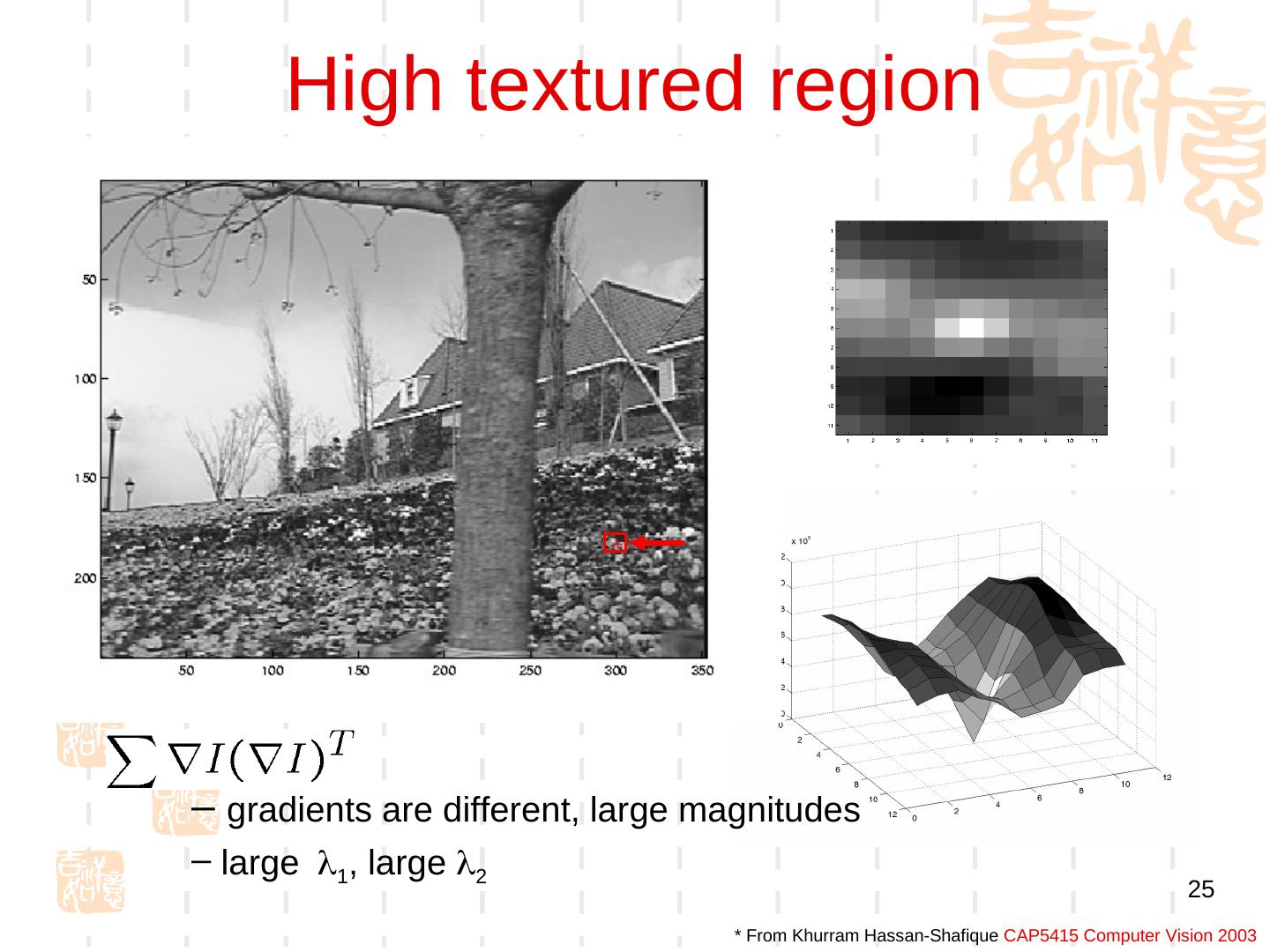
25 . High textured region – gradients are different, large magnitudes – large1, large 2 25 * From Khurram Hassan-Shafique CAP5415 Computer Vision 2003
26 . Observation This is a two image problem BUT Can measure sensitivity by just looking at one of the images! This tells us which pixels are easy to track, which are hard very useful later on when we do feature tracking... 26 * From Khurram Hassan-Shafique CAP5415 Computer Vision 2003
27 . 误差分析 What are the potential causes of errors in this procedure? Suppose ATA is easily invertible Suppose there is not much noise in the image • When our assumptions are violated – Brightness constancy is not satisfied – The motion is not small – A point does not move like its neighbors • window size is too large • what is the ideal window size? 27 * From Khurram Hassan-Shafique CAP5415 Computer Vision 2003
28 . 提高精度 Recall our small motion assumption It-1(x,y) It-1(x,y) • This is not exact – To do better, we need to add higher order terms back in: It-1(x,y) • This is a polynomial root finding problem – Can solve using New)ton’s method • Also known as New)ton-Raphson method – Lukas-Kanade method does one iteration of Newton’s method • Better results are obtained via more iterations 28 * From Khurram Hassan-Shafique CAP5415 Computer Vision 2003
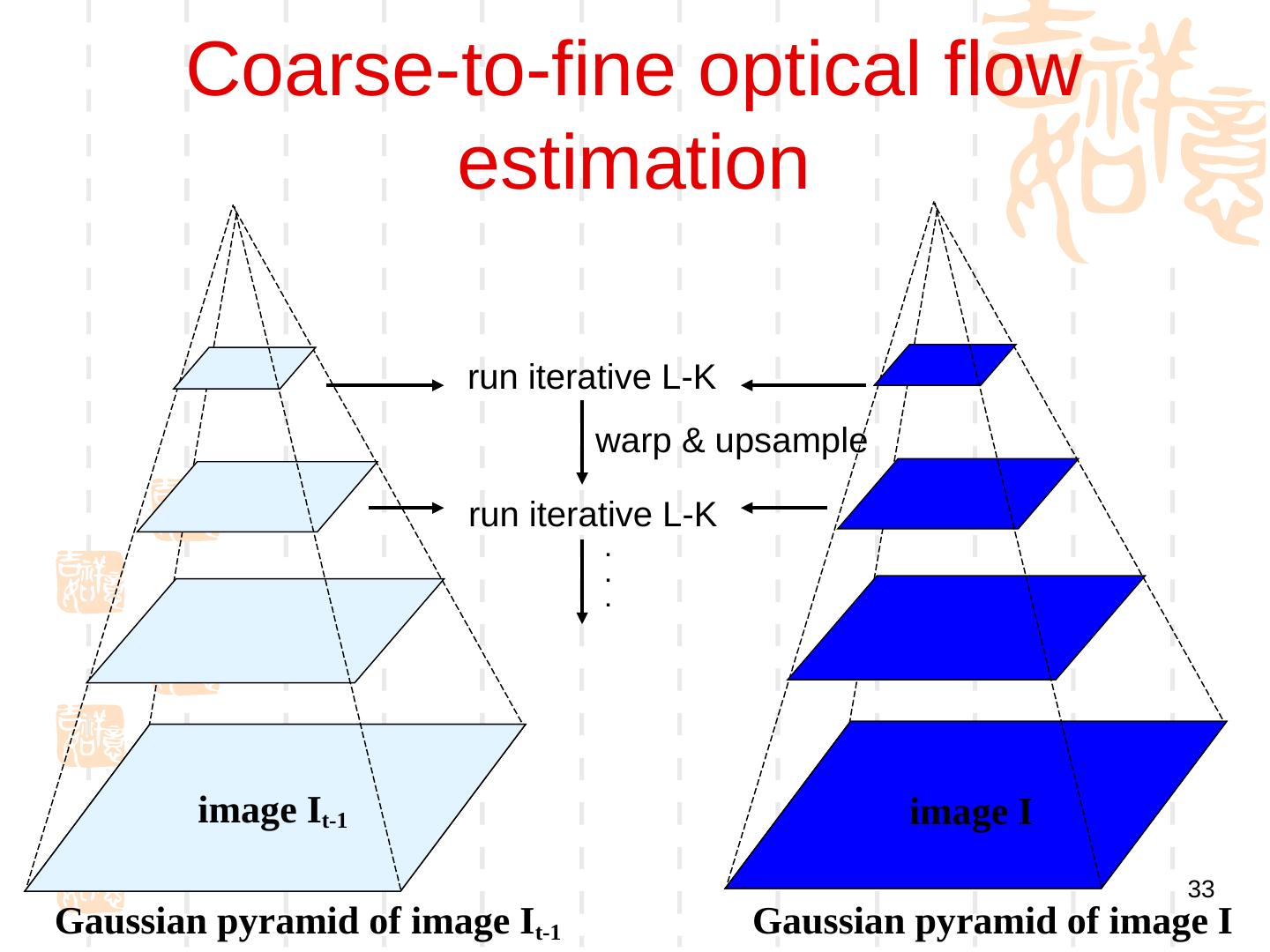
29 . 迭代更新 • Iterative Lukas-Kanade Algorithm 1. Estimate velocity at each pixel by solving Lucas-Kanade equations 2. Warp I(t-1) towards I(t) using the estimated flow field - use image warping techniques 3. Repeat until convergence 29 * From Khurram Hassan-Shafique CAP5415 Computer Vision 2003
3秒后跳转登录页面
去登陆

