








































































- 快召唤伙伴们来围观吧
- 微博 QQ QQ空间 贴吧
- 文档嵌入链接
- 复制
- 微信扫一扫分享
- 已成功复制到剪贴板
基于特征的图像对准:图像对准和位姿估计-增强现实
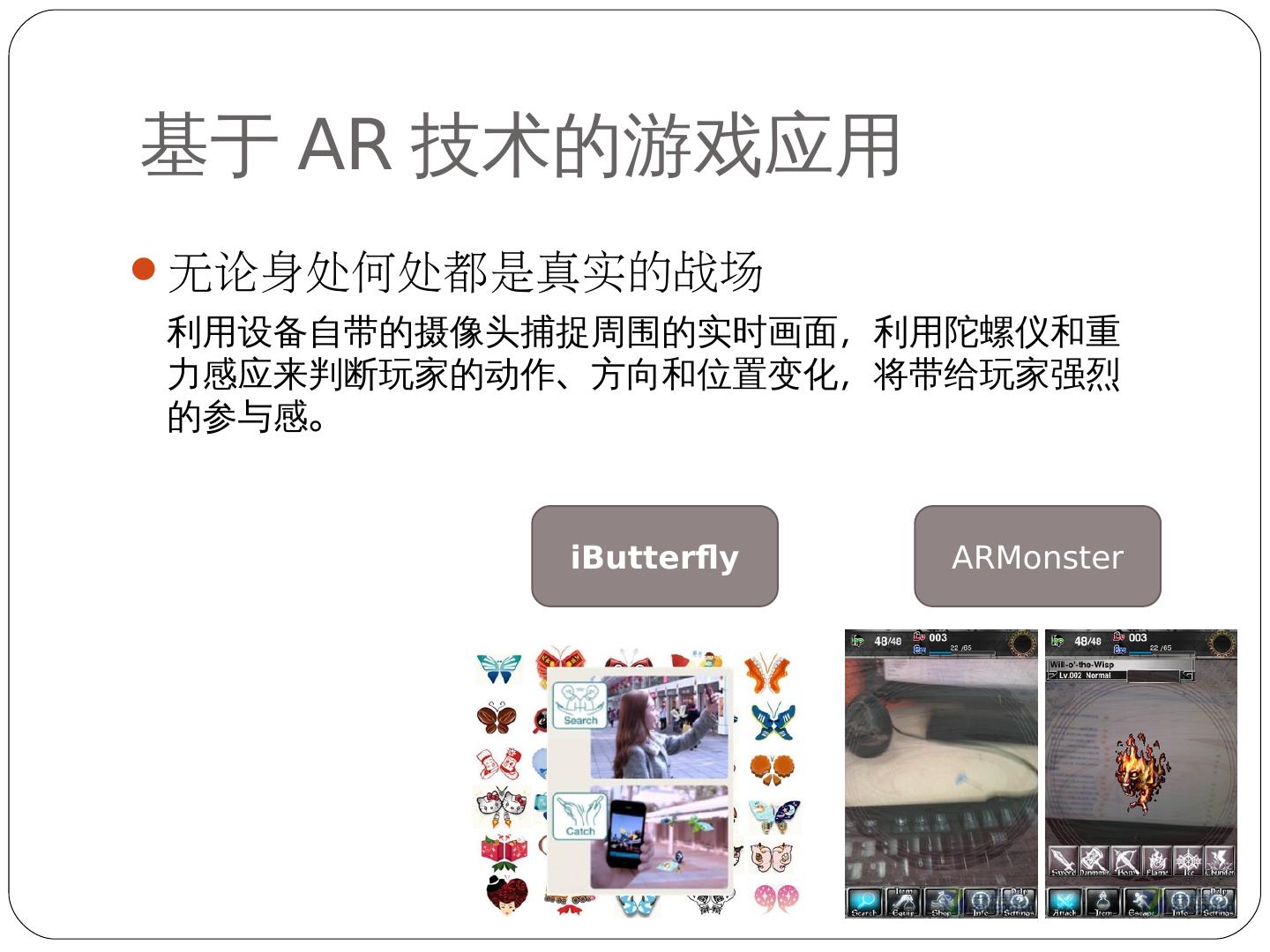
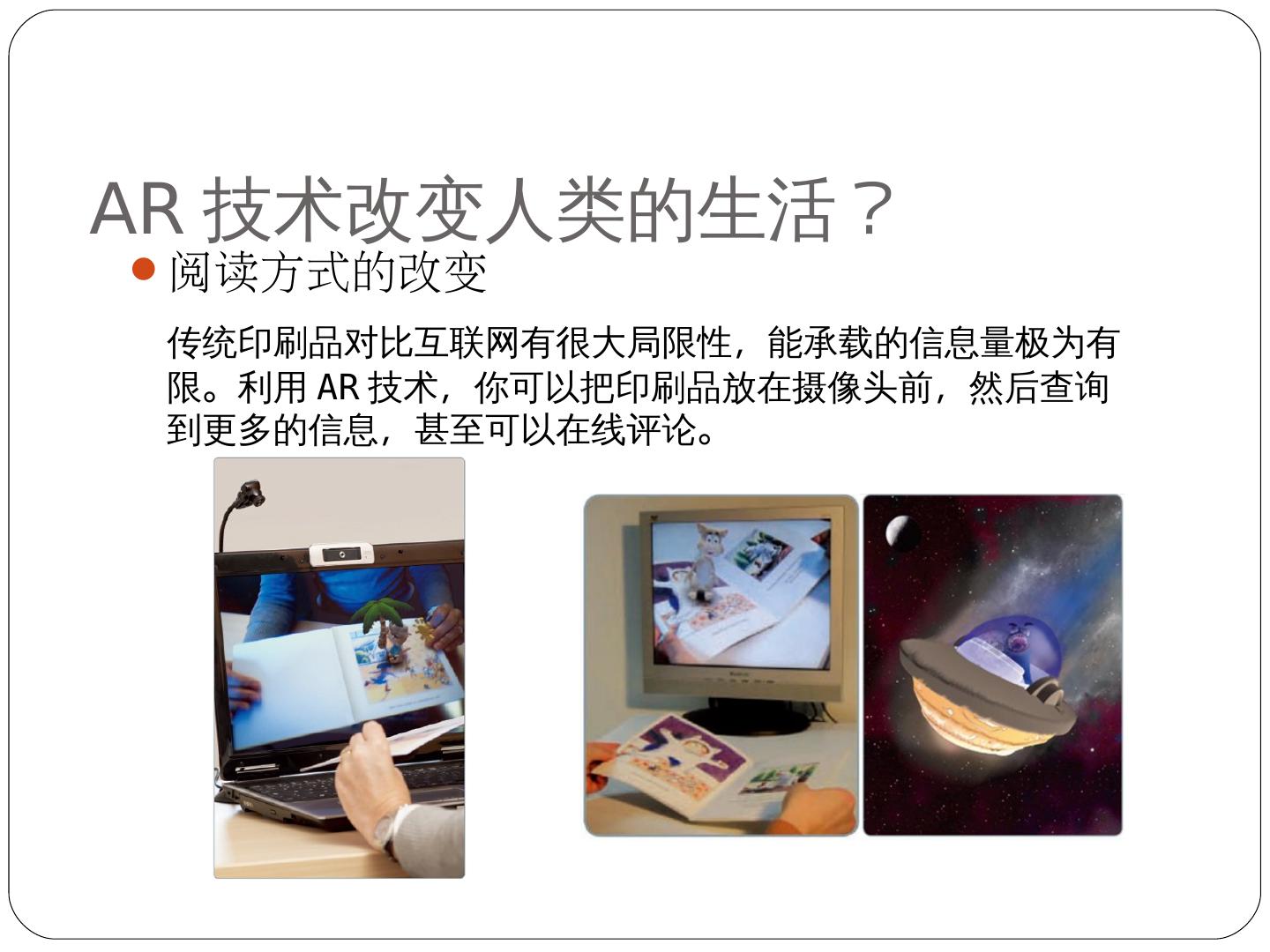
本章介绍基于特征的图像对准中的图像对准(Image Alignment)和位姿估计-增强现实(Augmented Reality),举例说明了什么是图像对准以及图像对准的两大类方法:直接对准(基于像素)、基于特征的对准;增强现实(Augmented Reality,简称?AR),是一种实时地计算摄影机影像的位置及角度并加上相应图像的技术,这种技术的目标是在屏幕上把虚拟世界套在现实世界并进行互动,本章介绍了AR技术的应用以及增强现实的开发工具。
展开查看详情
1 .第六章 基于特征的图像对准
2 . 主要内容 摄像机标定( Camera Calibration ) 图像对准 (ImageImage Alignment) 位姿估计 - 增强现实( Augmented Reality ) 2 CV:Calibration 18/10/12
3 .图像对准 -Image alignmentImage alignment
4 .A look into the past http://blog.flickr.net/en/2010/01/27/a-look-into-the-past/
5 . A look into the past Leningrad during the blockade http://komen-dant.livejournal.com/345684.html
6 . Bing streetside images http://www.bing.com/community/blogs/maps/archive/2010/01/12/new-bing-maps-ap plication-streetside-photos.aspx
7 .图像对准的应用 全景拼接 Panorama stitching 目标识别
8 .图像拼接的困难 小区域重叠 亮度变化 遮挡 , 混乱
9 .图像对准 • 两大类方法 : 直接 对准 ( 基于像素 ) 以大多数像素匹配为准则对准 基于特征的对准 以提取的特征匹配为准则对准 可以通过基于像素的方法进行验证
10 .基于拟合的对准 • 之前章节 : 在单幅图像内对提取的特征 ( 点、边缘段 等 ) 进行拟合,得到轮廓模型 M xi Find model M that minimizes residual( x , M ) i i
11 .基于拟合的对准 • 之前章节 : 在单幅图像内对提取的特征 ( 点、边缘段 等 ) 进行拟合,得到轮廓模型 M xi Find model M that minimizes residual( x , M ) i i •对准 : 对于两幅图像特征对间的变换关系进 行数据拟合 xi xi' Find transformation T T that minimizes residual(T ( x ), x) i i i
12 .2D 转换模型 • Similarity (translation, scale, rotation) • Affine • Projective (homography)
13 . 从仿射变换开始 • 简单的数据拟合程序 ( 线性最小二乘法 ) • 对于近似平面表面的物体和近似正交的相机可以近似 看作是视点变化 • 可以作为更复杂模型的初始拟合结果
14 . 拟合仿射变换 • 假如已知对应关系,怎样得到转换模型? ( xi , yi ) ( xi, yi) m1 m2 x 1 0 m3 xi xi m1 m2 xi t1 i yi 0 0 y m i 3 m4 yi t 2 0 0 xi yi 0 1 m4 yi t1 t2
15 .拟合仿射变换 m1 m2 x yi 0 0 1 0 m3 xi i 0 0 xi yi 0 1 m4 yi t1 t2 • 6 个未知数的线性方程组 • 每一对匹配的特征点能够建立两个独立的线性方 程 : 这样就至少需要三对匹配的特征点解出全部参 数
16 .基于特征的图像对准的过程
17 .基于特征的图像对准的过程 • 提取特征
18 .基于特征的图像对准的过程 • 提取特征 • 特征匹配
19 .基于特征的图像对准的过程 • 提取特征 • 特征匹配 • 迭代 : 选择三个特征点对,得到初始变换 T
20 .基于特征的图像对准的过程 • 提取特征 • 特征匹配 • 迭代 : 选择三个特征点对,得到初始变换 T 利用其它特征点对,验证变换 T
21 .基于特征的图像对准的过程 • 提取特征 • 特征匹配 • 迭代 : 选择三个特征点对,得到初始变换 T 利用其它特征点对,验证变换 T
22 .建立特征点对 ?
23 .建立特征点对 ? ? () = () feature feature descriptor descriptor • 对比兴趣点邻域范围的图像块的特征描述子
24 .特征描述子 • 假设每个图像块已经被归一化,怎样描述各个图像块 的相似性 ? • 特征描述需要具有对光照变化,噪声,图像模式的不 变性
25 . 特征描述子 • 最简单的描述子:图像灰度向量 • 怎样比较两个向量的相似性 ? Sum of squared differences (SSD) SSD(u , v) ui vi 2 i 不具有光照不变性 Normalized correlation (u , v) (u i i u )(vi v ) (u j u ) (v j v ) 2 2 j j 具有光照仿射不变性
26 . 特征描述子 • 直接 将图像块作为描述子的不足 : 小的改变就会影响匹配结果 • 解决办法 : 直方图 0 2
27 . 特征描述子 :SIFT • 描述子计算过程 : 将每个图像块分成 4x4x4x4 个子块 在每个子块内计算方向梯度直方图 (8 个参考方向 ) 最终生成的描述子 : 4x4x4x4x8 = 128 维 David G. Lowe. "Distinctive image features from scale-invariant keypoints.” IJCV 60 (2), pp. 91-110, 2004.
28 . 特征描述子 :SIFT • 描述子计算过程 : 将每个图像块分成 4x4x4x4 个子块 在每个子块内计算方向梯度直方图 (8 个参考方向 ) 最终生成的描述子 : 4x4x4x4x8 = 128 维 • 与直接用像素值相比的优势 梯度对于光照变化不敏感 实现了对于小变化的鲁棒性 , 仍然保留了空间信息 David G. Lowe. "Distinctive image features from scale-invariant keypoints.” IJCV 60 (2), pp. 91-110, 2004.
29 . 特征匹配 • 生成特征点对 : 对于图像中每个子块,在其它图像中 找到和它相似的一系列候选匹配块 ?
3秒后跳转登录页面
去登陆

