展开查看详情
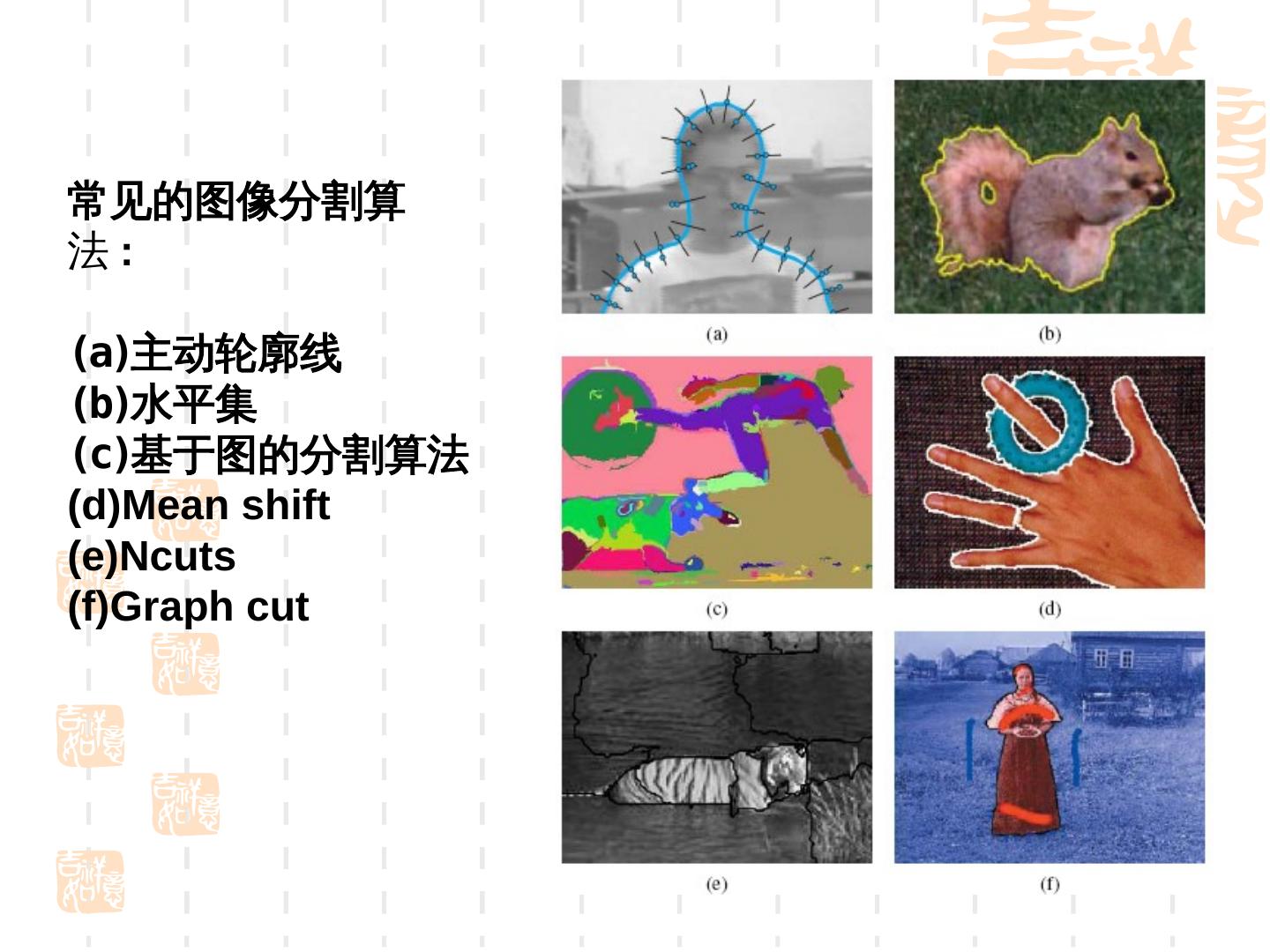
2 .常见的图像分割算
法:
(a)主动轮廓线
(b)水平集
(c)基于图的分割算法
(d)Mean shift
(e)Ncuts
(f)Graph cut
�
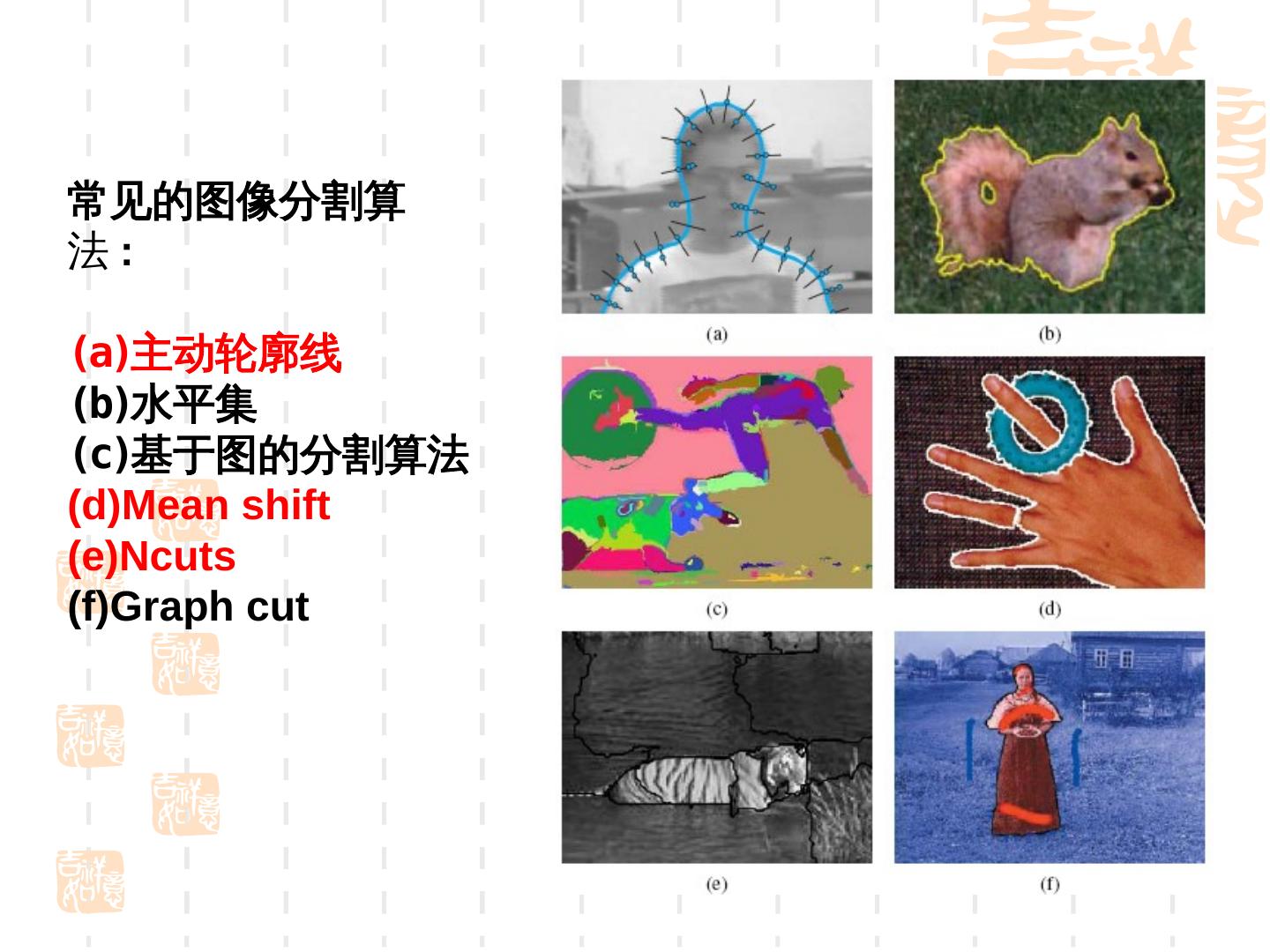
3 .常见的图像分割算
法:
(a)主动轮廓线
(b)水平集
(c)基于图的分割算法
(d)Mean shift
(e)Ncuts
(f)Graph cut
�
5 . 1. 引言
Marr 视觉计算理论的不足
三个独立的层次 , 底层缺乏约束导致病态问题
自下而上 , 底层的错误将被带给高层无法修正
Snakes: active contour models
Kass,1987,ICCV
对传统的视觉计算理论的挑战
设计这样一个能量函数 : 其局部极值组成了可供高层
视觉处理进行选择的方案 , 高层机制可能通过将图像
特征推向一个适当的局部极值点从该组方案中选择最
优的一种
�
6 . 1.1 Snake 模型的基本原理
基本原理是表征拟合误差的“能量”为最小化的曲线 .
设对于拟合目标有一个待选曲线集 , 定义能量函数
与待选集中每一条曲线相关联 , 能量函数的设计原
则就是 : 有利属性要能导致能量缩小。
有利属性包括 : 曲线连续、平滑、曲线与高梯度区
域接近以及其他一些具体的先验知识。
活动轮廓在取值范围内移动时 , 就能在能量函数的
指导下收敛到局部边界 , 且能保持曲线的连续和平
滑。
�
7 . 1.1 Snake 模型的基本原理
蛇模型是在曲线本身的内力和图像数据的外部约束力作用
下的移动的变形轮廓线。
作用在蛇模型上的力依据轮廓所在的位置及其形状决定如
何在空间局部的变化。
内力和外力的作用是不同的 : 内力起平滑约束作用 , 外
力则引导蛇模型向图像特征移动。
施加在蛇模型上的外力来自于图像或更高层的处理外力 ,
将蛇模型推离不期望的特性。
蛇模型的内力包含两项 . 形象的说 , 可以认为蛇模型是
由两种抽象的弹性材料构成 : 弦与杆。前者使轮廓抵抗
韧性 , 而后者使轮廓抵抗弯曲。
�
9 . 1.2 Snake 模型的特点
Snake 模型的优点
图像数据、初始估计、目标轮廓及基于知识的约束统
一于一个特征提取过程中 ;
经适当地初始化后 , 它能够自主地收敛于能量极小值
状态 ;
尺度空间中由粗到精地极小化能量可以极大地扩展捕
获区域和降低计算复杂性
Snake 模型的缺点
对初始位置敏感 , 需要依赖其他机制将 Snake 放
置在感兴趣的图像特征附近 ;
它有可能收敛到局部极值点 , 甚至发散 .
�
10 . 2.Snake 模型的数学模型
定义 Snake 模型为一可变形曲线
S 为归一化的曲线长度 , 变化范围 (0,1)
蛇模型的总能量函数是
�
11 . 2.Snake 模型的数学模型
Eint 是内部能量 , 控制蛇模型特性 , 定义为
分别是 v 对 s 的一阶和二阶导数 , 系数 α 、 β
分别是控制蛇模型的弹性和刚性 , 这些参数操纵着模型的物
理行为和局部连续性
外部能量 Eext 决定着向某种固定的特征移动蛇模型 , 吸
引蛇模型到显著的图像特征。因为这些特征只能根据特定
的问题而定义 , 所以一般的外部能量函数不易确定。因
此 , Eext 没有统一的数学表达式 , 必须从问题本身的特
性出发 , 根据实际情况处理
�
12 . 外部能量 (Eext)
图像能量
定义函数 Eimage(x,y) ,反映的是对图像特征(如反映的是对图像特征(如
边界)的兴趣程度
Eext Eimage (v ( s ))ds
s
Eimage(x,y) 函数的定义是一个关键问题 .
典型的例子为
Eimage ( x, y ) | x, y )|2
Eimage ( x, y ) | (G ( x, y ) * I ( x, y )) |2
�
13 . 能量与内外力平衡方程
目标轮廓的确定就被转化成了极小化如下的能量泛函
的问题
1
Esnake ( s ) | vs |2 ( s ) | vss |2 ) Eimage (v( s ))ds
s
2
由变分法的原理出发 , 可以将其转化为 Euler 方程
vss vssss Eimage 0
这一方程可以被看作是轮廓内外力的平衡公式 .
每个力都有对应的意义,反映的是对图像特征(如在这些力的作用下轮廓发生
形变。
�
14 . 弹性力
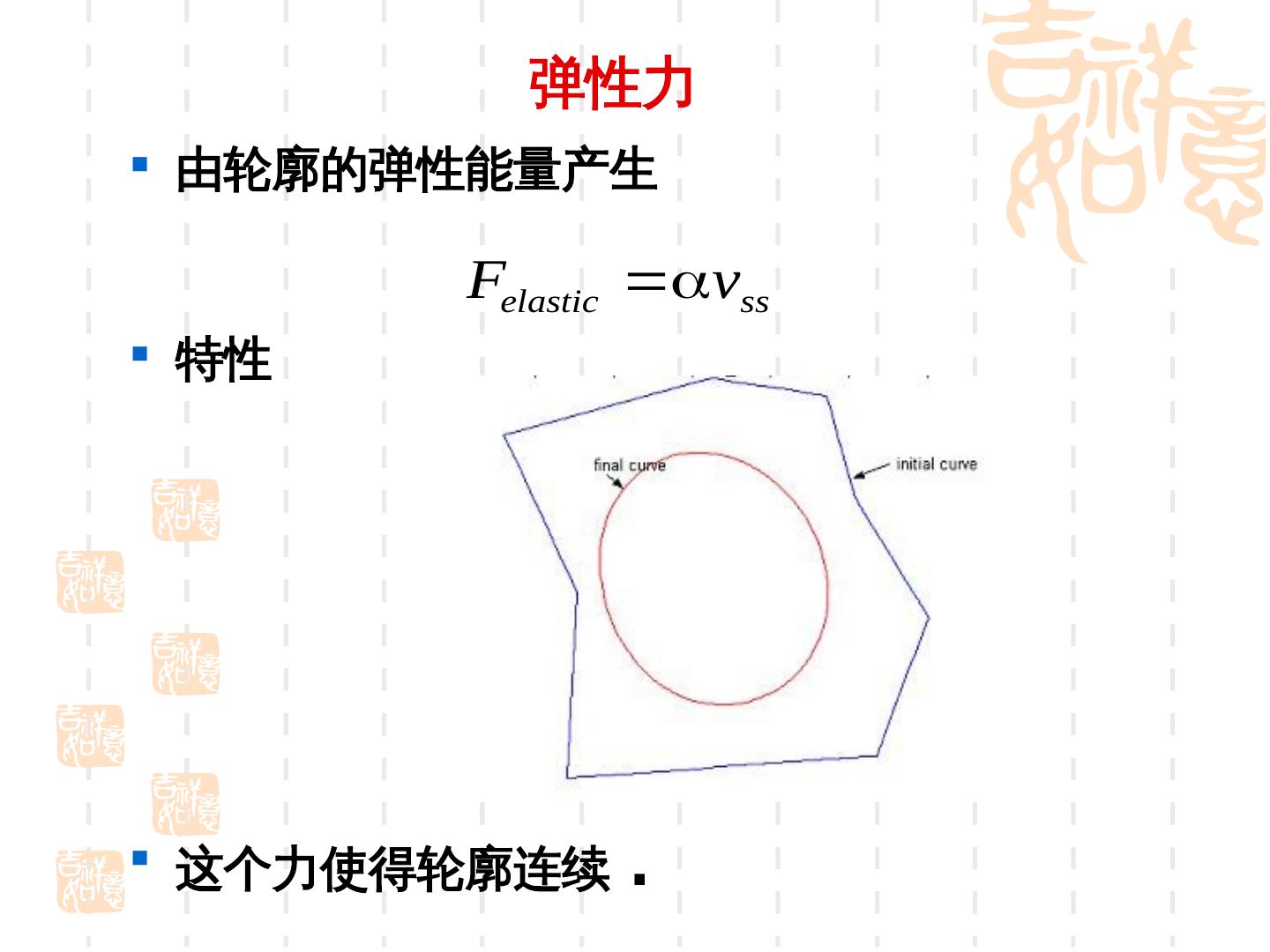
由轮廓的弹性能量产生
Felastic vss
特性
这个力使得轮廓连续 .
�
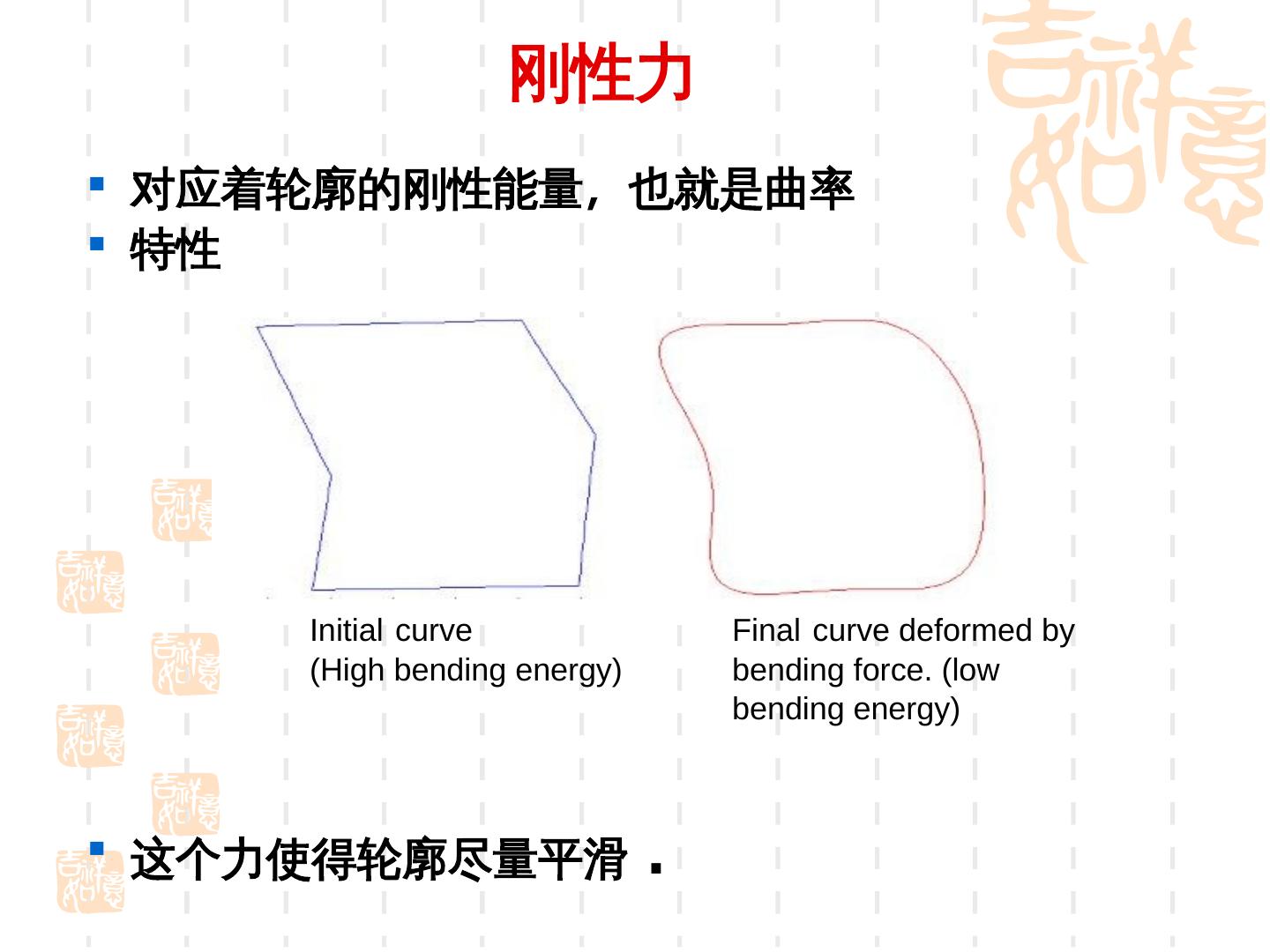
15 . 刚性力
对应着轮廓的刚性能量,反映的是对图像特征(如也就是曲率
特性
Initial curve Final curve deformed by
(High bending energy) bending force. (low
bending energy)
这个力使得轮廓尽量平滑 .
�
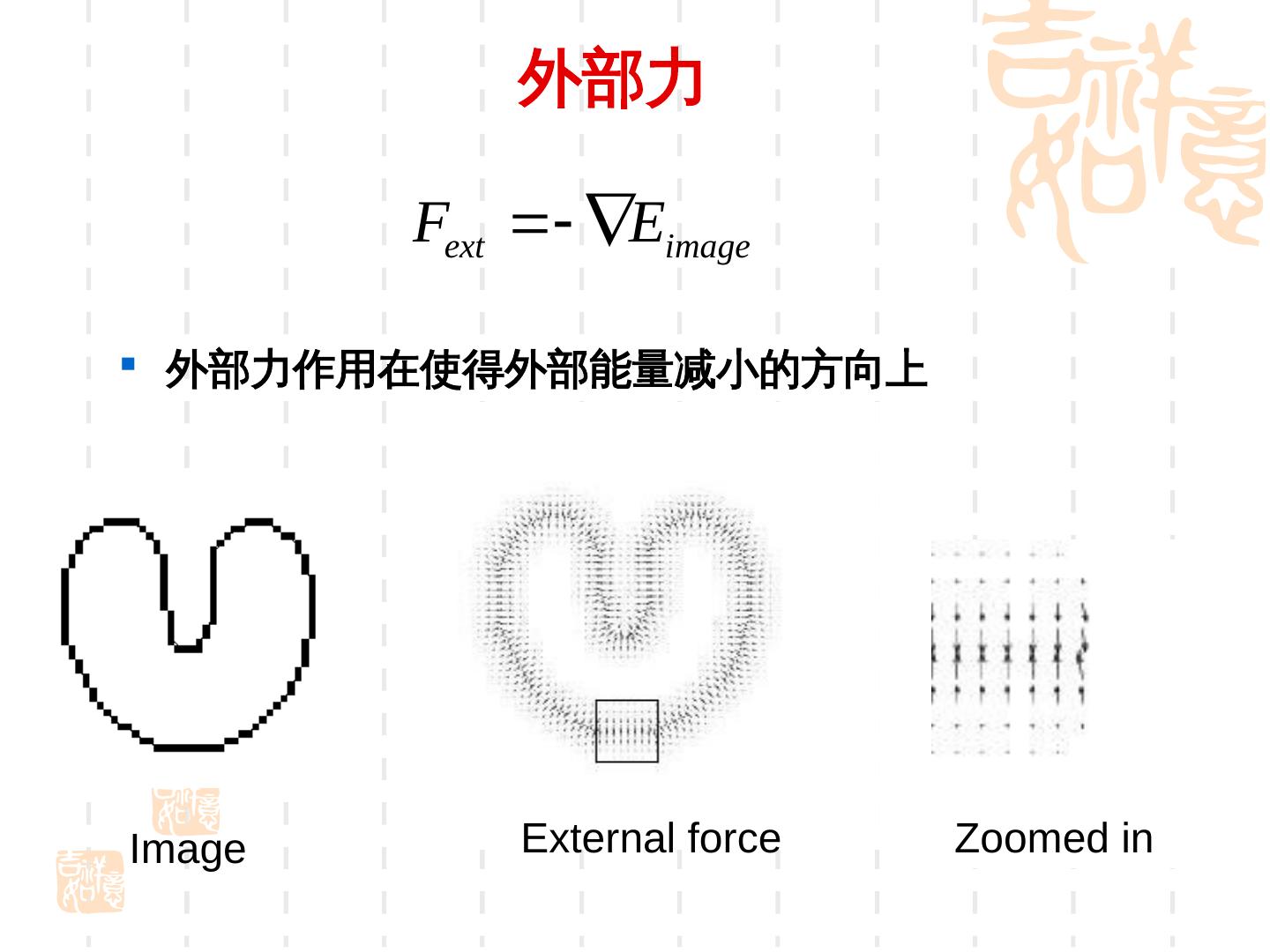
16 . 外部力
Fext Eimage
外部力作用在使得外部能量减小的方向上
Image External force Zoomed in
�
17 . 离散化
轮廓 v(s) 由一系列控制点组成v0 ,v1 ,.....,vn-1
轮廓通过依次连接更个控制点并分段线性化得到 .
平衡力方程独立作用于各个控制点
每个控制点在内外力的作用下是可以移动的 .
能量以及平衡力的方程均作离散化处理。
�
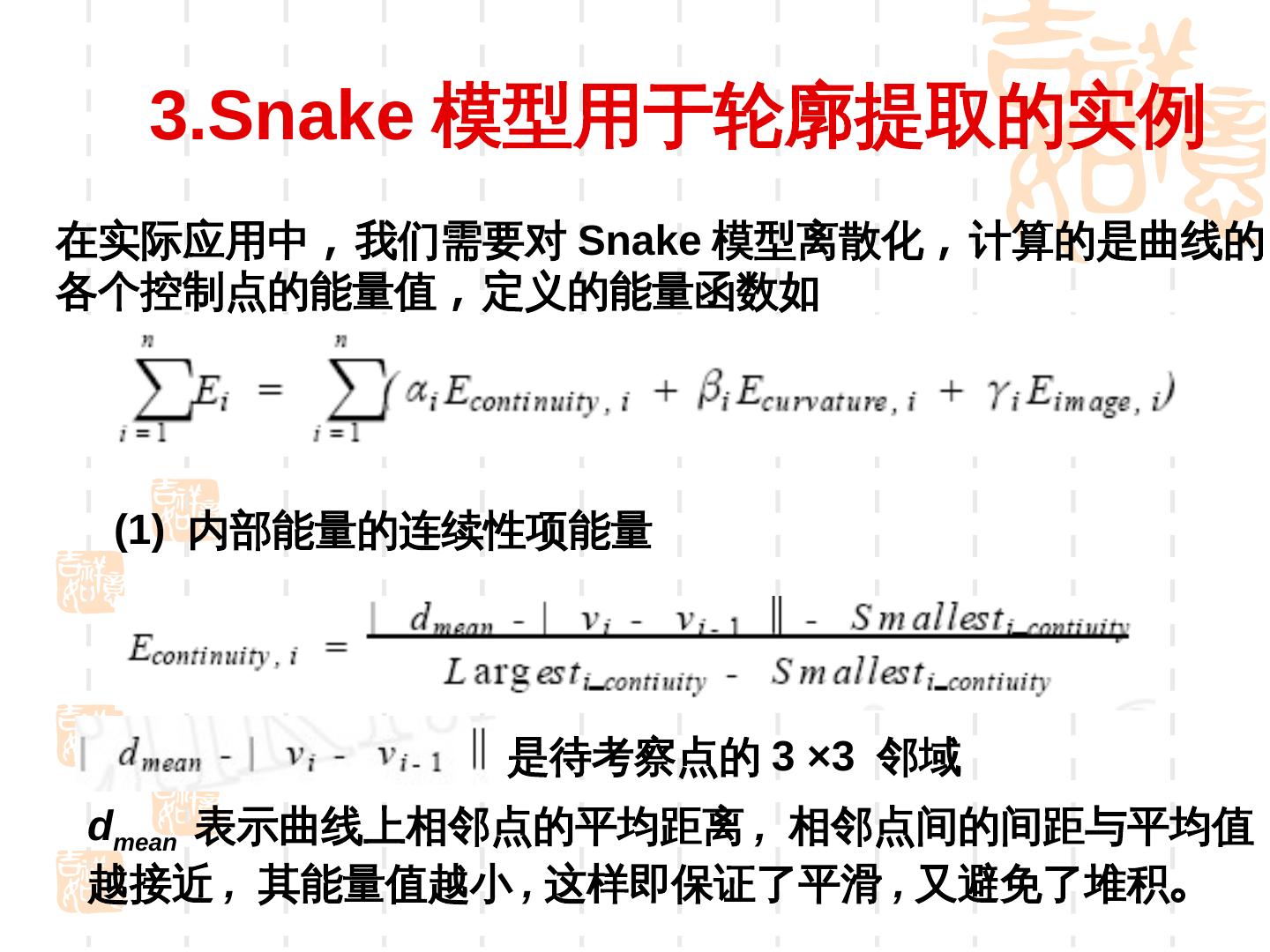
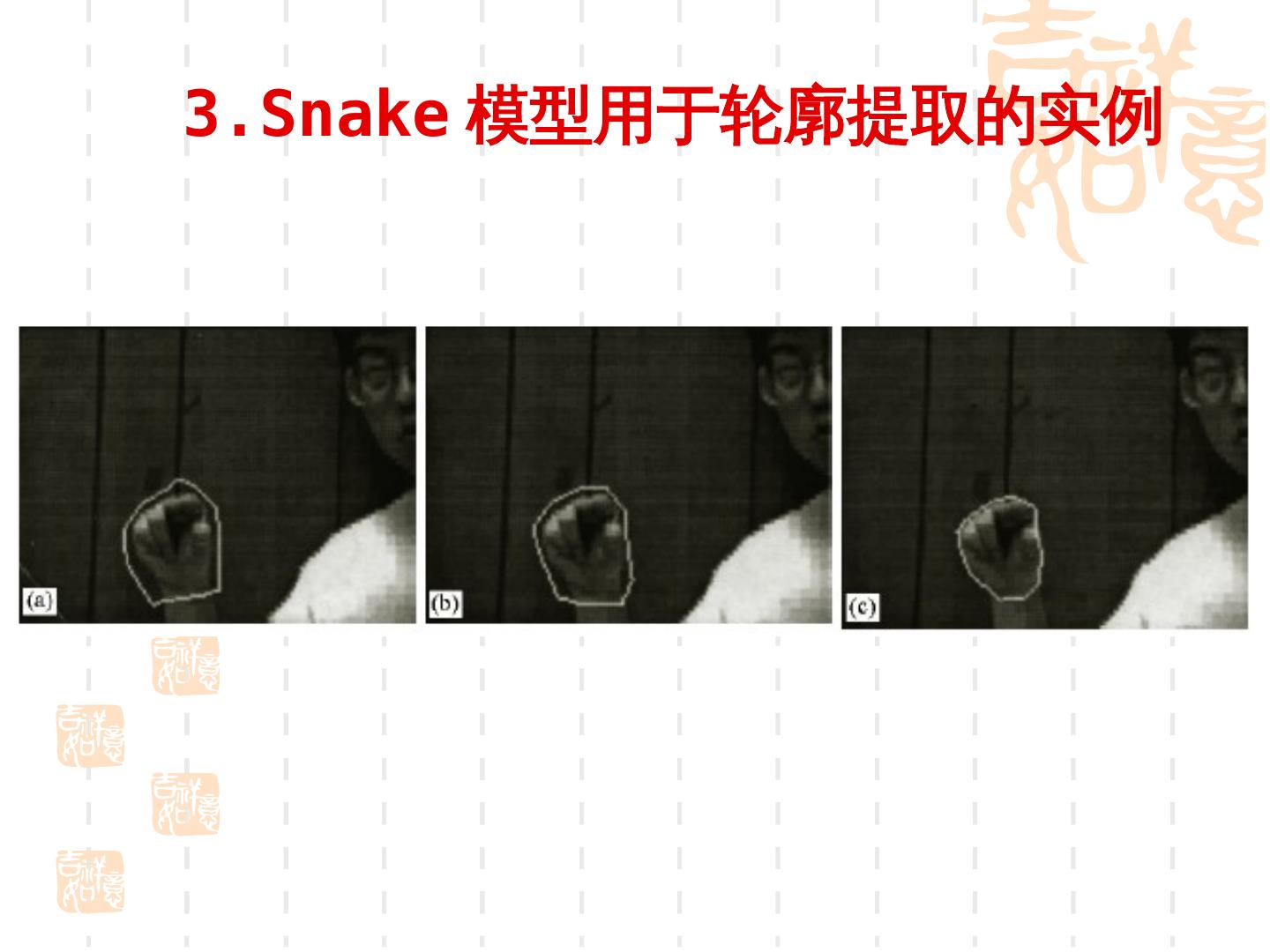
18 . 3.Snake 模型用于轮廓提取的实例
在实际应用中 , 我们需要对 Snake 模型离散化 , 计算的是曲线的
各个控制点的能量值 , 定义的能量函数如
(1) 内部能量的连续性项能量
是待考察点的 3 ×3 邻域
dmean 表示曲线上相邻点的平均距离 , 相邻点间的间距与平均值
越接近 , 其能量值越小 , 这样即保证了平滑 , 又避免了堆积。
�
19 . (2) 内部能量的曲率项能量
是向量 和 之间的夹角 Δθ 的余弦值
夹角越小 , 越 用来估计曲线上各点的曲率
小,
�
20 .(3) 图像能量
这一项表示图像的约束条件 , 根据有利边界点的原则 , 边界点应具
有较小的值
是边缘检测算子 , 是待考察点的 3 ×3 邻域内
的最大值 , 是最大值 .这样的计算用于归一化
(4) 在确定能量函数后 , 对曲线按照能量最小进行迭代 .
�
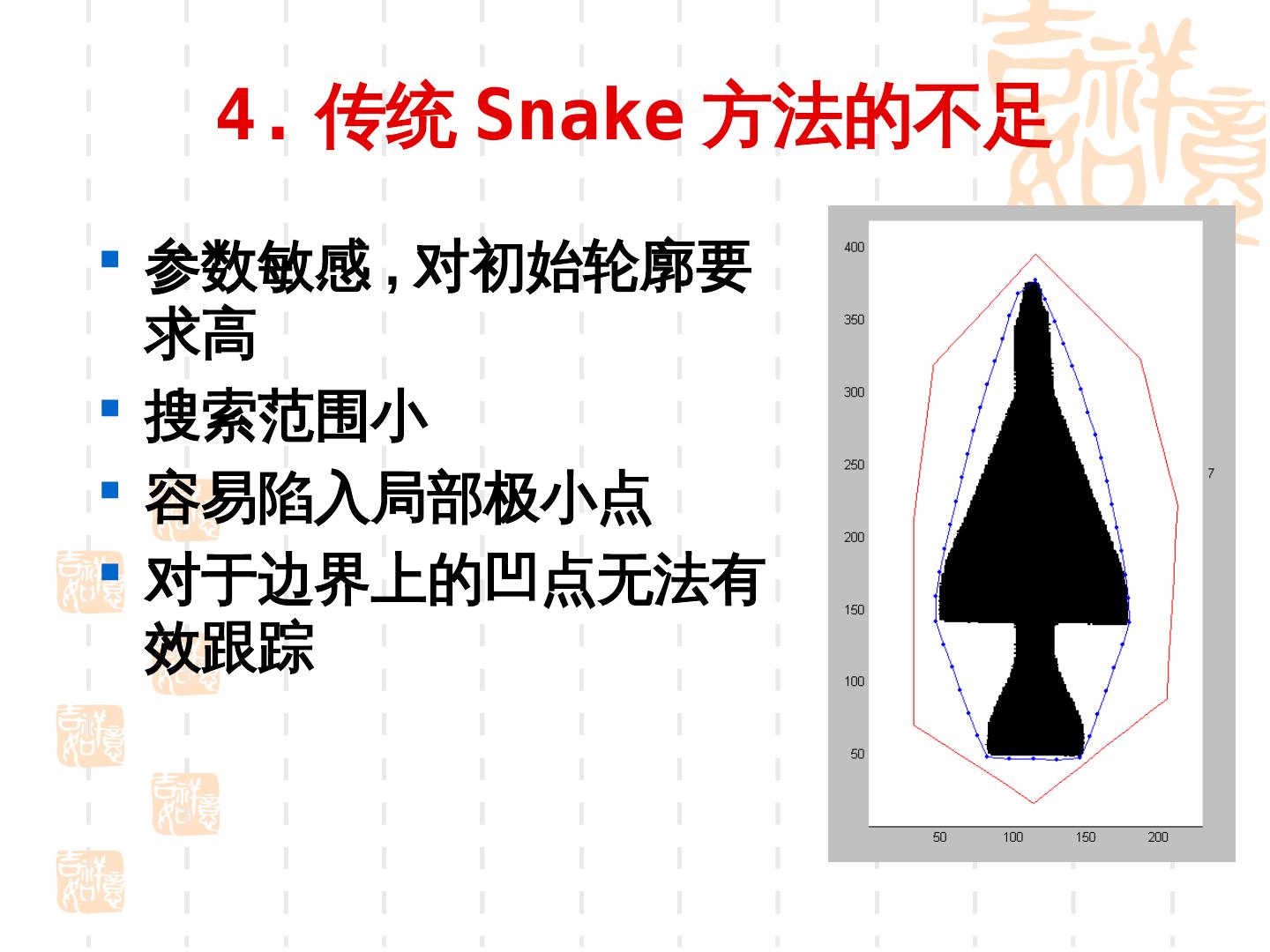
22 . 4. 传统 Snake 方法的不足
参数敏感 , 对初始轮廓要
求高
搜索范围小
容易陷入局部极小点
对于边界上的凹点无法有
效跟踪
�
23 . 4.Snake 模型的改进
改善 Snake 对初始化轮廓的敏感性 ;
保证 Snake 能够收敛到全局极值 ;
改善 Snake 在能量极小化过程中的收敛
速度或数值稳定性 .
�
24 . 气球力— balloon force
Cohen L D, On active contour models and
balloons.1991, Image Understanding
在轮廓线上施加另一外部约束力 , 使轮廓线向目
标靠拢。在该力的作用下轮廓线不断的向外膨胀 ,
最终进化到目标轮廓 , 可以形象的称之为气球力
由气球力所构造的能量项 , 在能量函数中的数学
形式可以表达为 :
为以控制点 vi 为中心的大小为 n ×m
的领域内的第 (j ,k) 个邻点 , · 代表矢量间的点乘运算 . ni
是轮廓线上控制点 vi 处的单位法线矢量 , 这样在规定的领
域内 , 在法线矢量 ni 方向上离控制点 vi 最远的点将拥有
�
25 . 气球力— balloon force
在引入气球力能量项之后 , Snake 模型的外部能量项可以描述为
其中参数 k 用来控制气球力的方向 , 当 k 为负数时 , 气球力使
轮廓线向内收缩 , 相反当 k 为正数时 , 气球力使轮廓向外膨胀 ;
在选择参数 k 和 l 的大小时 , 一般将它们置于同一数量级 , 且 l
稍大于 k , 这是为了在边缘点时轮廓线能够停止运动。
这样 , 原始模型的缺点得到改善 , 对轮廓线的初始化位置要求明
显降低 , 即使在初始位置离希望提取的边缘相当远时 ,Snake 照
样能够进化到目标轮廓。
该模型改善了蛇模型对初始轮廓的敏感性 , 并且能够跨越图像
中的伪边缘点。
�
26 .梯度矢量流 -Gradient Vector Flow(GVF)
Xu C. and JL Prince. 1998. Snakes, shapes, and gradient
vector flow. IEEE Trans Image Processing. 7(3): 359-363
它的数学基础来源于电磁场理论中的亥姆霍兹理
论 , 这种理论阐明了可以将一种普通的静态矢量
场分解为两个组成部分 , 即无旋场部分和有旋场
部分。
在传统的主动轮廓模型中 , 图像梯度信息仅仅是
作为一个静态的无旋场来平衡方程。但是实际上
我们能得到一个更加一般化的静态矢量场 , 它不
仅包含无旋场部分 , 还包含有旋场部分。
GVF 的提取可以有效的解决曲率变化很大的控
制点的收敛效果 , 但是相对的计算会很慢。
�
27 .梯度矢量流 -Gradient Vector Flow(GVF)
GVF 定义一个力的向量场
V(x,y) = (u ( x, y ), v( x, y ))
GVF snake 的内外力平衡方程为
vss vssss V 0
GVF snake 定义的能量泛函为
E (u x2 u y2 vx2 v y2 ) | f |2 | V f |2 dxdy
�
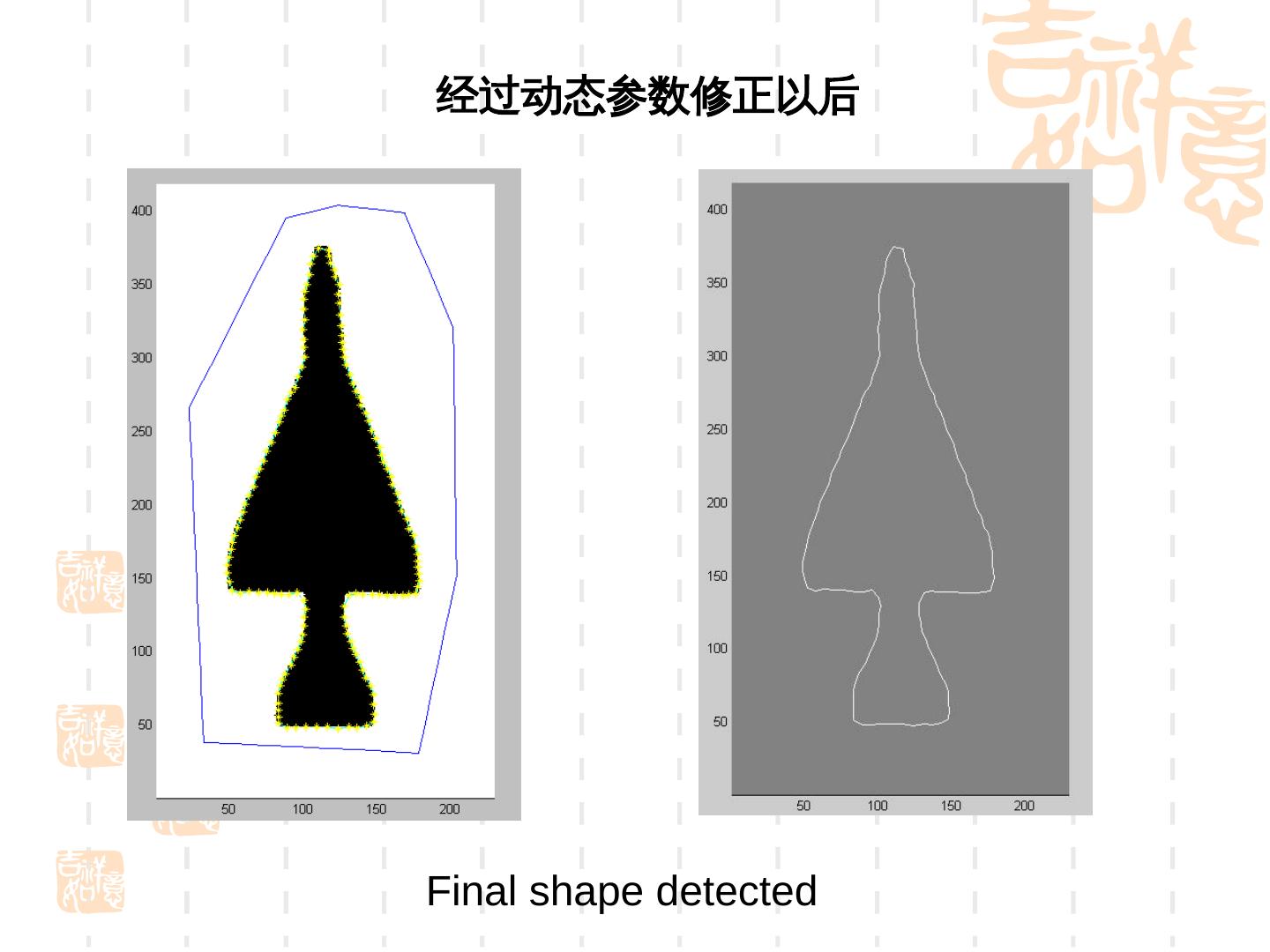
28 . GVF 场可以通过求解下述方程得到
u (u f x )( f x2 f y2 ) 0
v (v f y )( f x2 f y2 ) 0
2 是拉普拉斯算子 .
上述方程的求解是通过顺序迭代 u 和 v 实现的
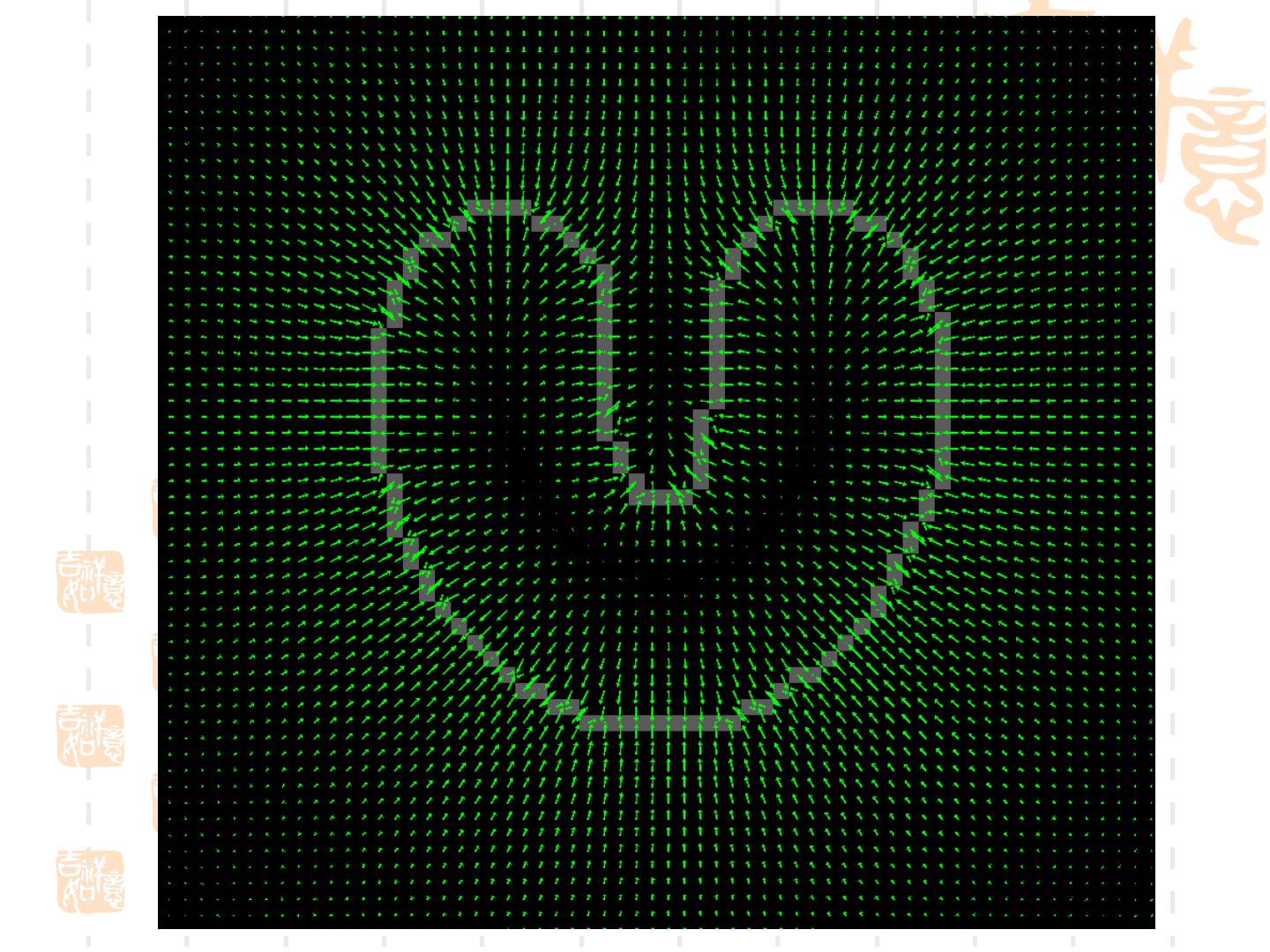
能够检测边界上凹点的原因 .
使得 f 由 | f| 大的地方向 | f| 小的
地方扩散 , 因而扩大了 Snake 模型的捕捉范
围 , 也能较好地进入深度凹陷区域
�
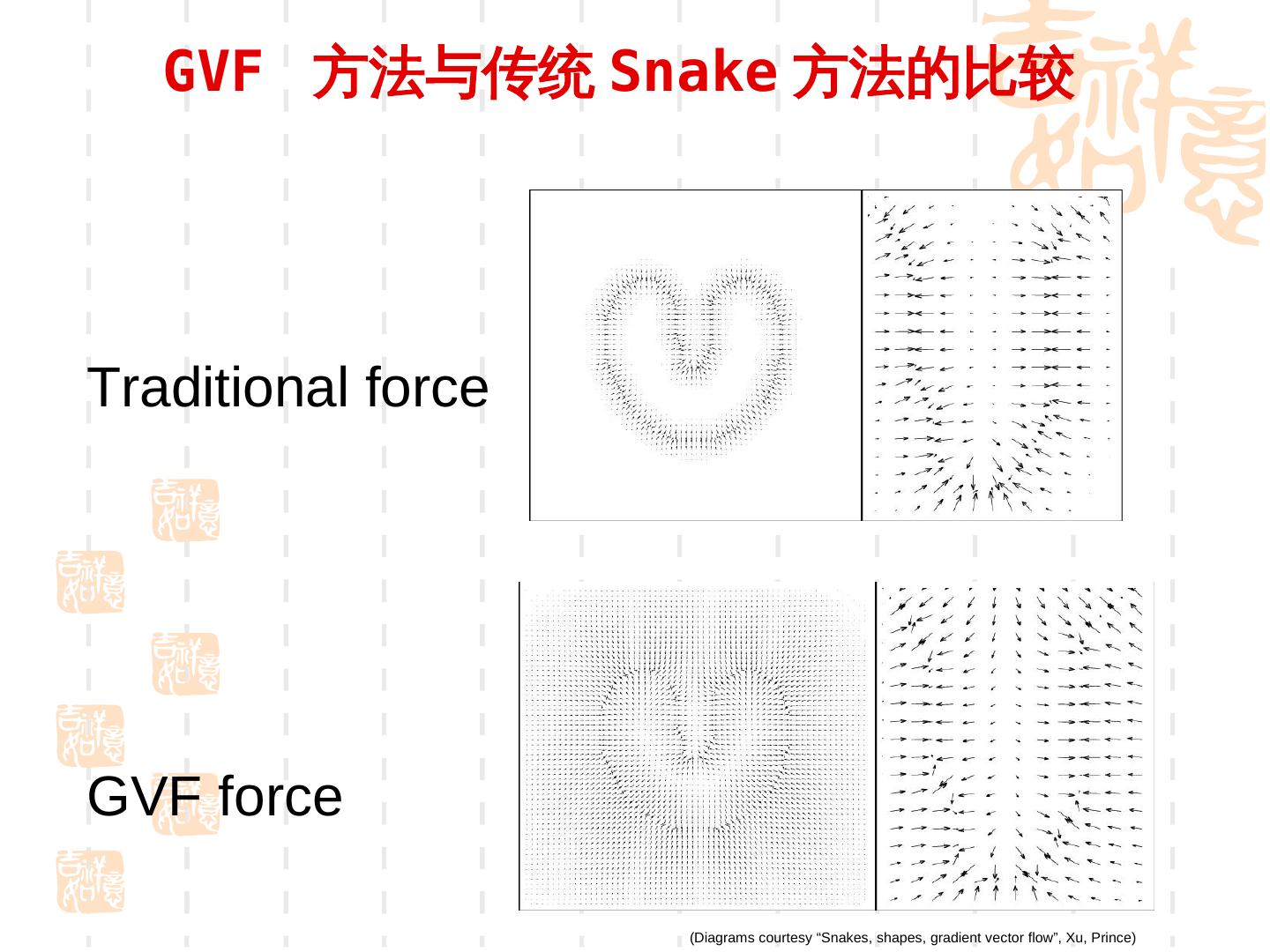
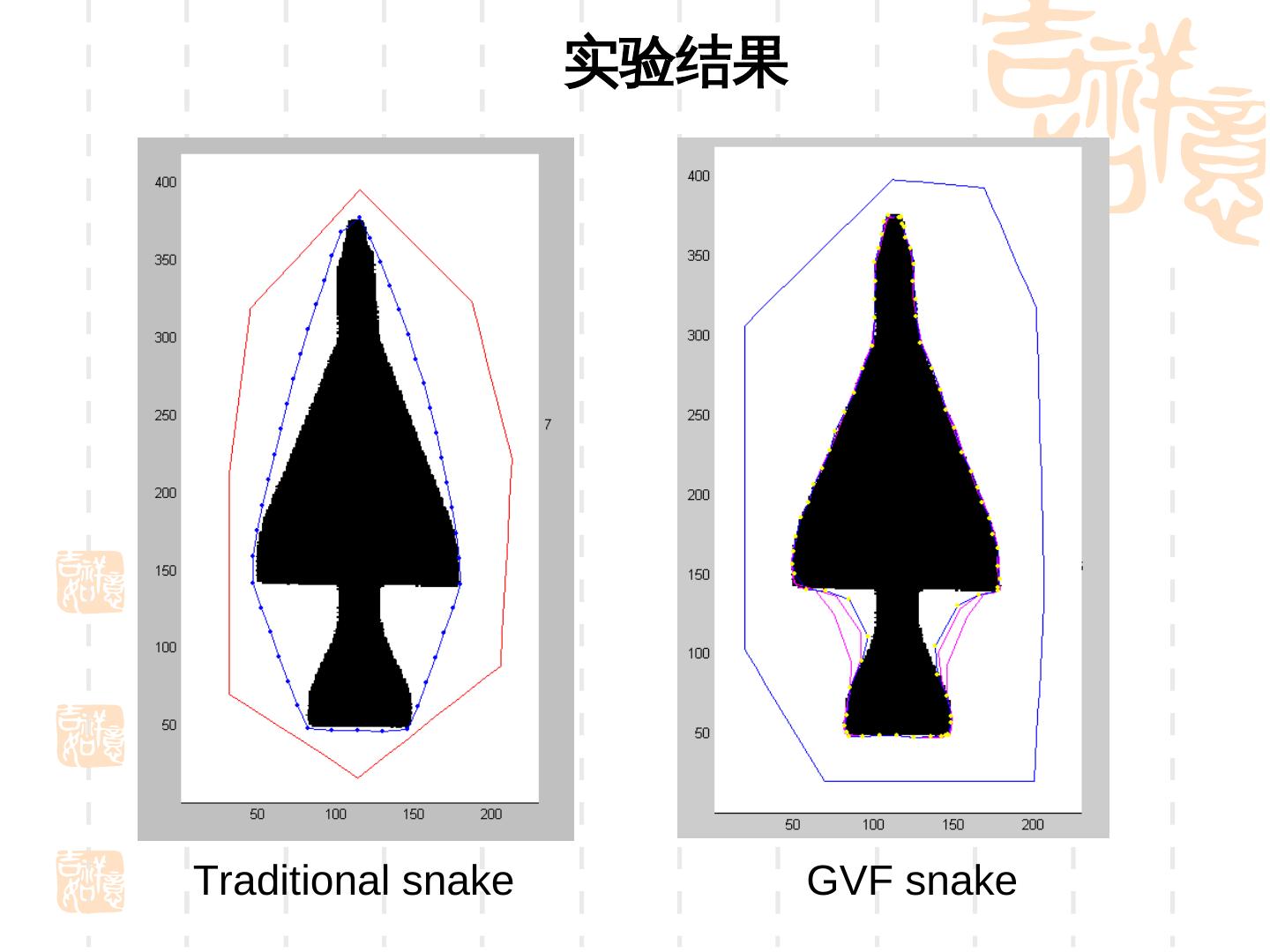
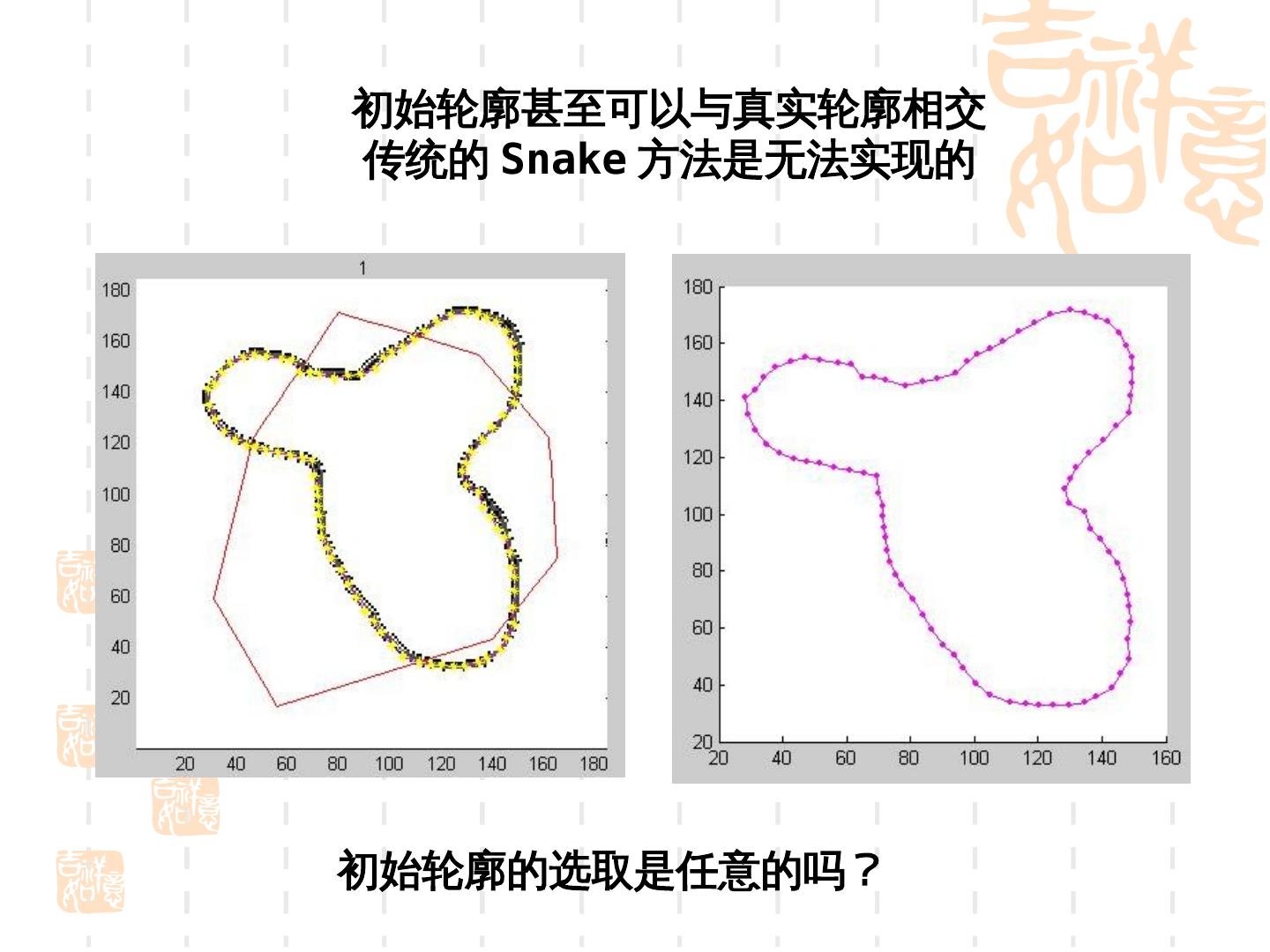
29 . GVF 方法与传统 Snake 方法的比较
Traditional force
GVF force
(Diagrams courtesy “Snakes, shapes, gradient vector flow”, Xu, Prince)
�