



















































- 快召唤伙伴们来围观吧
- 微博 QQ QQ空间 贴吧
- 文档嵌入链接
- 复制
- 微信扫一扫分享
- 已成功复制到剪贴板
计算机视觉:特征的提取与匹配
本章举例说明了图像的特征提取与匹配,介绍了基于特征的计算机视觉处理的一般流程:特征提取、特征描述、特征匹配、特征跟踪,介绍了点特征的处理、面特征的处理、边缘特征的处理、线特征的处理的方法,以及几种算子性能比较,关键点描述子,特征匹配等内容
展开查看详情
1 .第四章 特征的提取与匹配
2 .
3 .
4 . 特征的提取和匹配 左图像 角点 线 结构 对于左图像中的每一个特征…
5 .特征的提取和匹配 右图像 角点 线 结构 在右图像中寻找相似度最大的特征
6 .基于特征的计算机视觉处理的一般流程 特征提取 确定显著性图像特征(点、线、面)的位置 特征描述 对特征进行紧凑、唯一、可理解的描述 特征匹配 在其它图像中寻找相似度最大的特征 特征跟踪(可选,一般用于视频处理) 仅在原有特征的很小的邻域范围内寻找特征
7 .主要内容 点特征的处理 面特征的处理 边缘特征的处理 线特征的处理
8 .点特征提取算法 点特征主要指 明显点,提取 点特征的算子 称为兴趣算子 或有利算子
9 .点特征的灰度特征
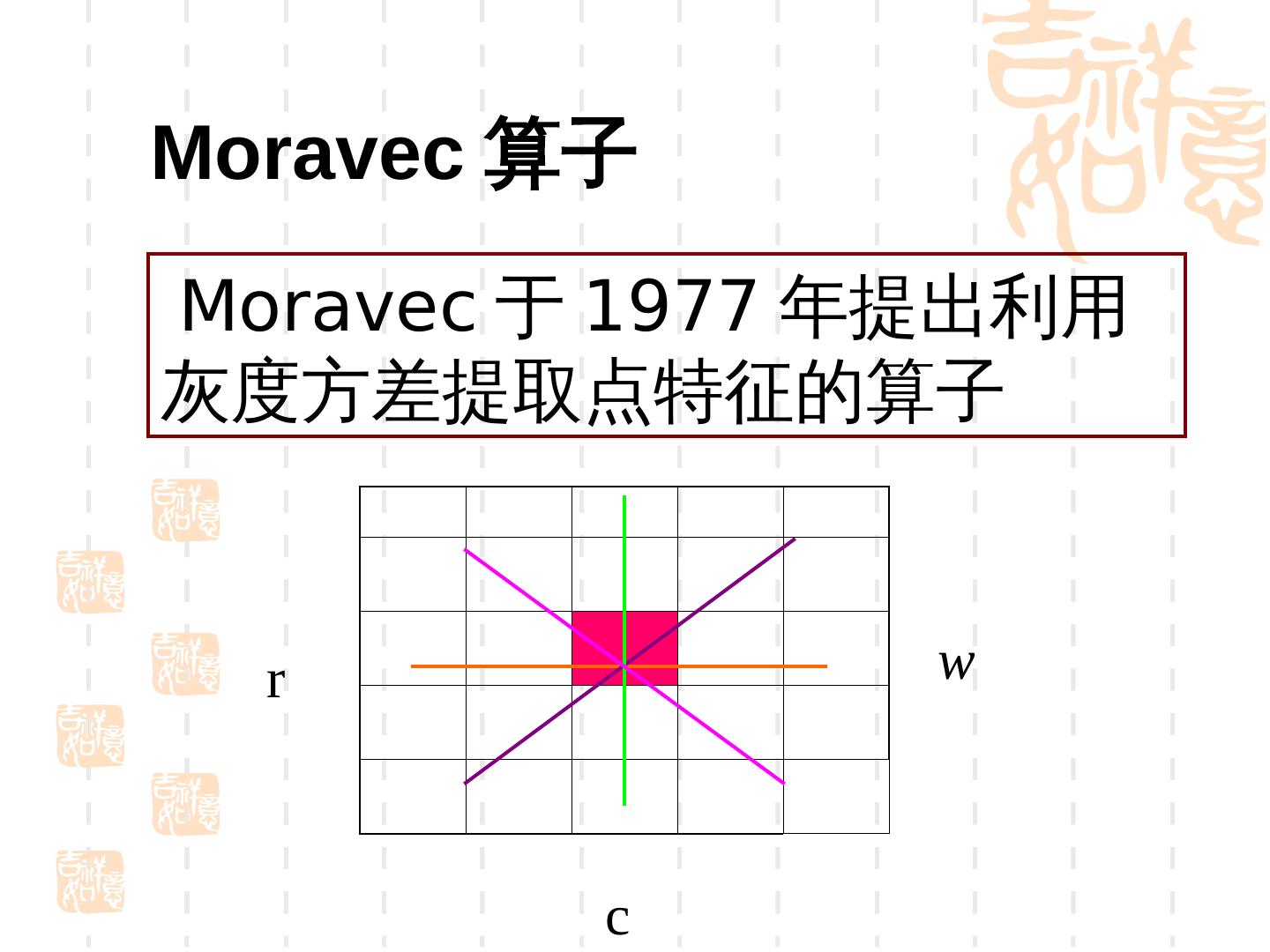
10 .Moravec 算子 Moravec 于 1977 年提出利用 灰度方差提取点特征的算子 r w c
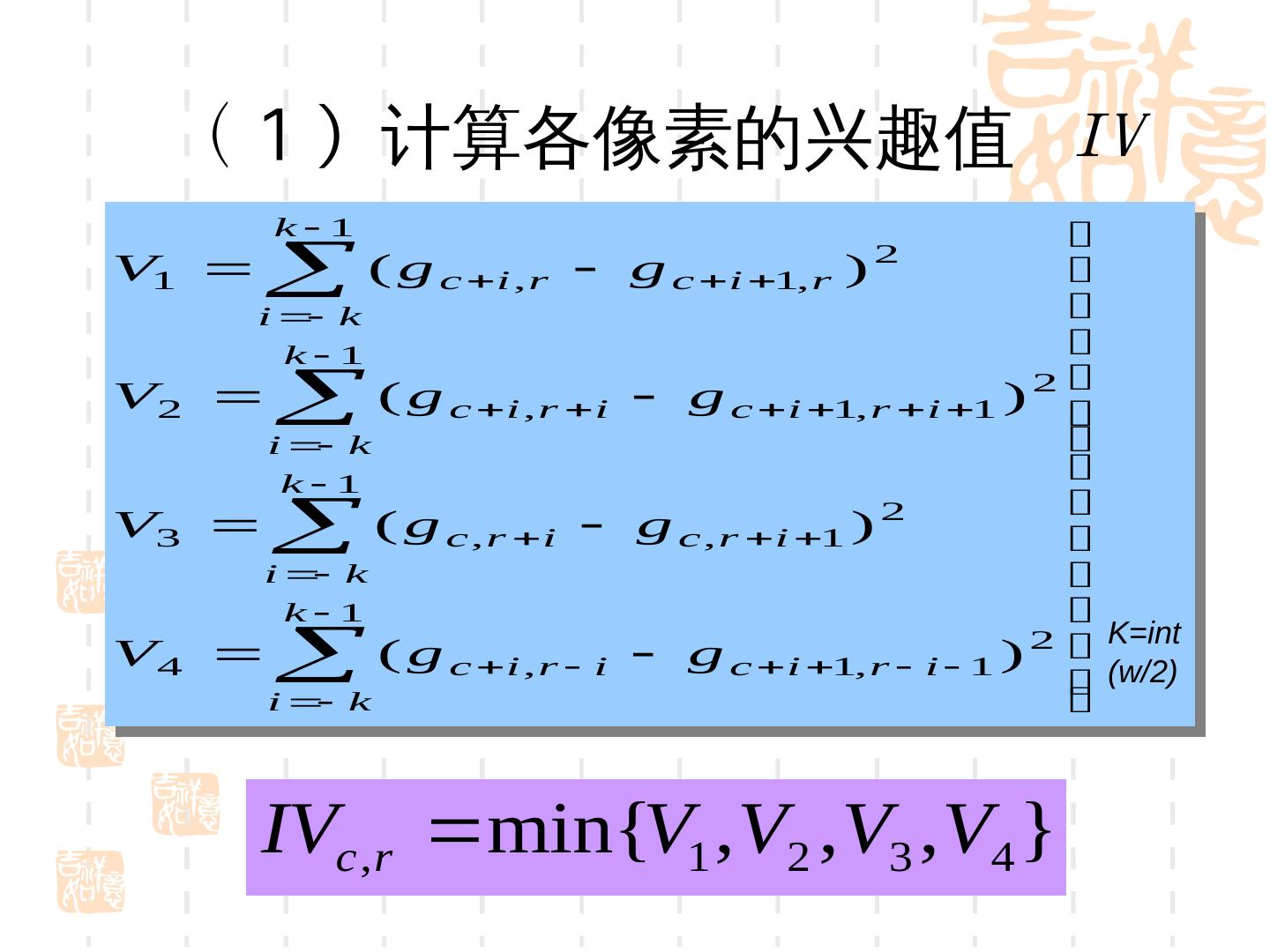
11 . ( 1 )计算各像素的兴趣值 IV kk1 1 V11 V ii kk ((ggcc g ii,,rr gcc ii 11,,rr )) 22 kk1 1 2 V V22 ii kk ( g ( gcc i , r i , r ii g g c i 1, r c i 1, r i 1i 1 )) 2 kk1 1 V V33 ( g ( gcc,,rr g ii gcc,,rr ii 1) 1 ) 22 ii kk kk1 1 K=int V V44 ( g ( gcc g ii,,rr ii gcc ii11 ) 22 1 ) (w/2) ,,rr ii1 ii kk IVc ,r min{V1 , V2 , V3 , V4 }
12 .( 2 )给定一经验阈值,将兴趣值 大于阈值的点作为候选点。 ( 3 )选取候选点中的极值点作为 特征点。 综上所述, Moravec 算子是在四个 综上所述, Moravec 算子是在四个 主要方向上,选择具有最大――最 主要方向上,选择具有最大――最 小灰度方差的点作为特征点。 小灰度方差的点作为特征点。
13 .Forstner 算子 计算各像素的 Roberts 梯度和像素( c , r )为中 心的一个窗口的灰度协方差矩阵,在图像中寻找具 有尽可能小而接近圆的误差椭圆的点作为特征点。 -1 1 r l Roberts 梯度 1 -1 c
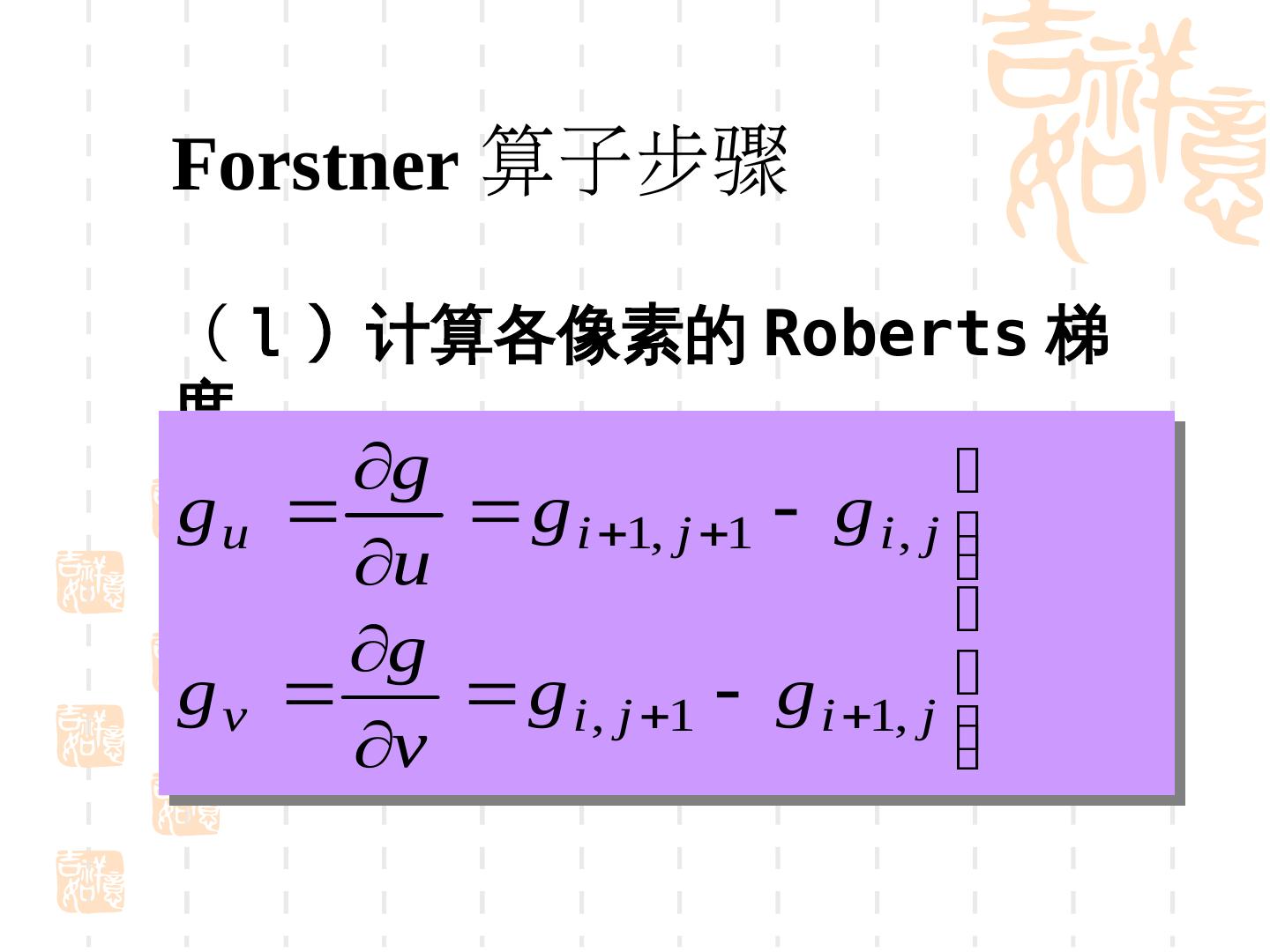
14 .Forstner 算子步骤 ( l )计算各像素的 Roberts 梯 度 gg gguu ggii11,, jj11 ggii,, jj uu gg ggvv gii,, jj11 gii11,, jj g g vv
15 .( 2 )计算 ll (如 55 或更大) 窗口中灰度的协方差矩阵 g guu 22 g g g g uu vv Q Q N N 22 g g v v gg uu gg vv c k 1 r k 1 2 g u i 1, j 1 i , j ( g i c k j r k g ) 2 c k 1 r k 1 g v2 i , j 1 i 1, j ( g i c k j r k g ) 2 c k 1 r k 1 gu g v (g i c k j r k i 1, j 1 g i , j )( g i , j 1 g i 1, j )
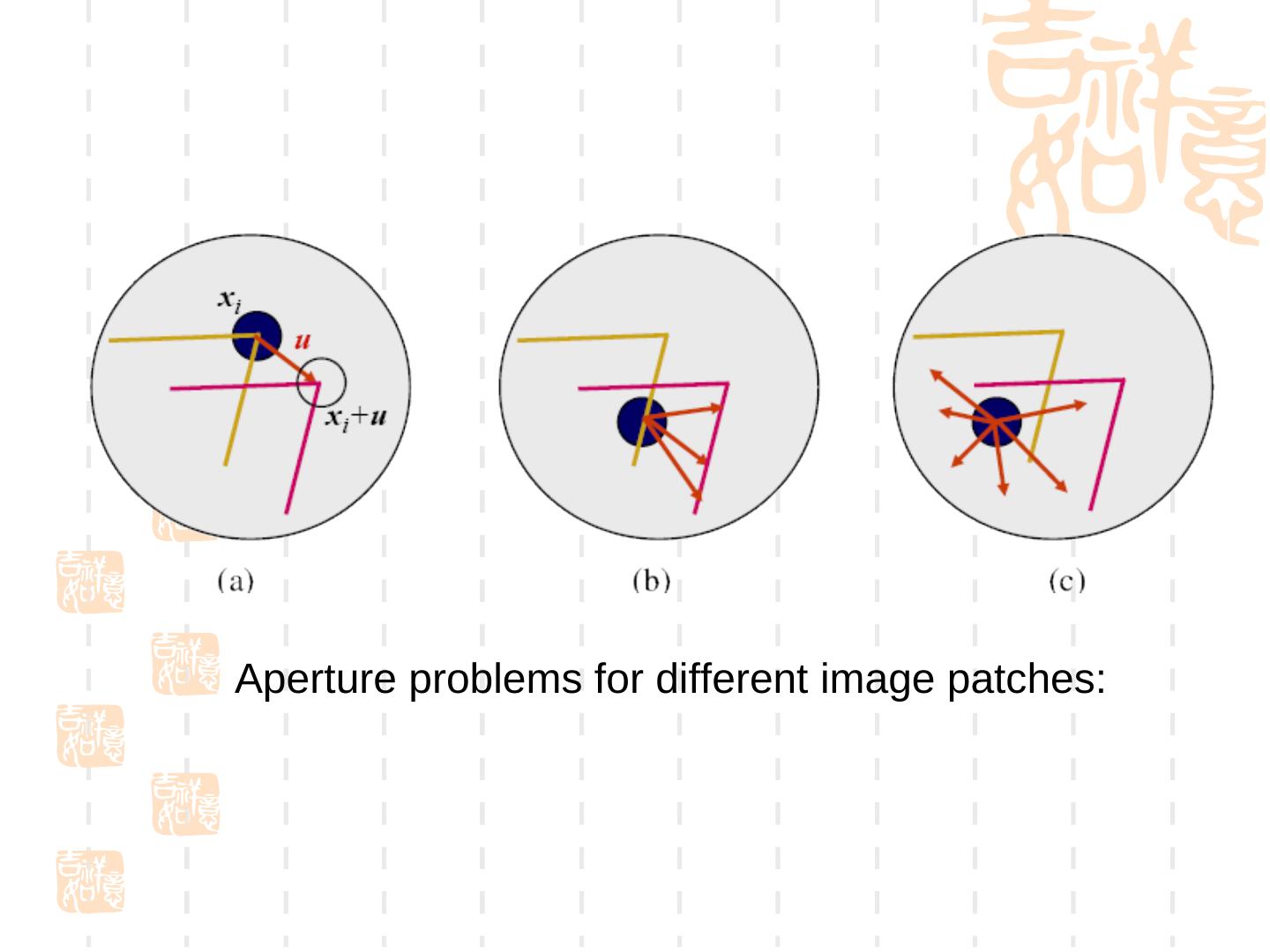
16 .哪个图像块更容易被定位?
17 .Aperture problems for different image patches:
18 .判断两幅图像的相似度 由于无法得到另一幅图像,只能在当前图像内寻找 根据泰勒级数展开, 可得,
19 .图像自相关函数分析 矩阵 A 与信号处理中的自相关函数密切相关 . 设 α , β 为矩阵 A 的特征值,则 α , β 与局部自相关函数 的主曲率成比例 . 当两个曲率都低时,局部自相关函数是平坦的,那么窗口图 像区域的灰度值近似为常量;当只有一个曲率高而另一个曲 率低时,局部自相关函数呈脊形,那么 E 只有当沿山脊移动 时变化小,这就表示是边缘;当两个曲率都高时,局部自相 关函数是尖峰,那么 E 在任意方向上移动都会增加,这就表 示是角点 . 因此我们可以由 α , β 的值判断是否是角点。为了不对 M 进行分解求特征值,可以采用 Tr(A) 和 Det(A) 来代替 α,β, Tr ( A) A B A I x 2 B I y 2 Det ( A) AB C 2 C I x I y
20 .
21 .
22 . ( 3 )计算兴趣值 q 与 w 1 DetN 4 DetN q 2 trQ trN (trN ) DetN 代表矩阵 N 之行列 trN 代表矩阵 N 之 式 迹
23 . (4 )确定待选点 Tqq T 00..5 5~~0 0..75 75 w (( ff ffw 00..5 5~~1 1..5 5)) T T c ( c ccc (c 5) 5 ) 当 同时 ,该像素为待选点 q Tq 同时 ,该像素为待选点 w Tw ,该像素为待选点 ( 5 )选取极值点 即在一个适当 同时 ,该像素为待选点 窗口中选择最大的待选点
24 .Harris 算子 角点是景物轮廓线上曲率的局部极大点,对掌握景物 的轮廓特征具有决定作用。一旦找到了景物的轮廓特 征点也就大致掌握了景物的形状。直观的讲,角点就 是图像上所显示的物体边缘拐角所在的位置点。 Harris 角点检测法是一种基于图像灰度的检测方法 ,这类方法主要通过计算点的曲率及梯度来检测角点。 该方法是由 Harris 和 Stephen 于 1988 年提出来 的,也叫 Plessey 角点检测法。其基本思想与 Moravec 角点算子相似,但对其作了许多改进。
25 .Moravec 角点算子 计算各像素沿同方向的平均灰度变化,选取最小值作为对应 像素点的角点响应函数。定义在一定范围内具有最大角点响 应的像素点为角点。 Moravec 角点算子简单快速,但是它存在一些缺点 : •各向异性 , 只考虑四个方向 •对强边界敏感 , 只考虑了兴趣值的最小值
26 .Harris 角点算子 这里一阶微分可以由下面的式子近似 因此 ,EE 可以表现成 :
27 . Harris 角点算子 为消除噪声 , 进行高斯平滑 : 在平移方向 (x , y) 上的 E 可以表示如下 : ~ gx gx g y M G ( s ) gx g y g y M为 2×2 的矩阵 :
28 .Harris 角点算子 兴趣值的计算公式为 : I Det ( M ) kTrace 2 ( M ), k 0.04 Harris 算法认为,特征点是局部范围内的极大兴趣值对应的 像素。因此,在计算完各点的兴趣值后,要提取出原始图像中 的所有局部兴趣值最大的点。 实际操作中,可以依次取出每个像素的 8 邻域中的 8 个像素, 从中心像素和这 8 个像素中提出最大值,如果中心点像素的兴 趣值就是最大值,则该点就是特征点。 在提取特征点时,凡满足大于某一阈值的像素点均可被认为是 特征点。 阈值选取的方法:通过确定图像中所能提取的最大可能的特征 点数目 N 来选择值最大的若干像素点作为特征点。局部极值点 的数目往往很多,根据 I 值进行排序,取其前 N 个为特征点。
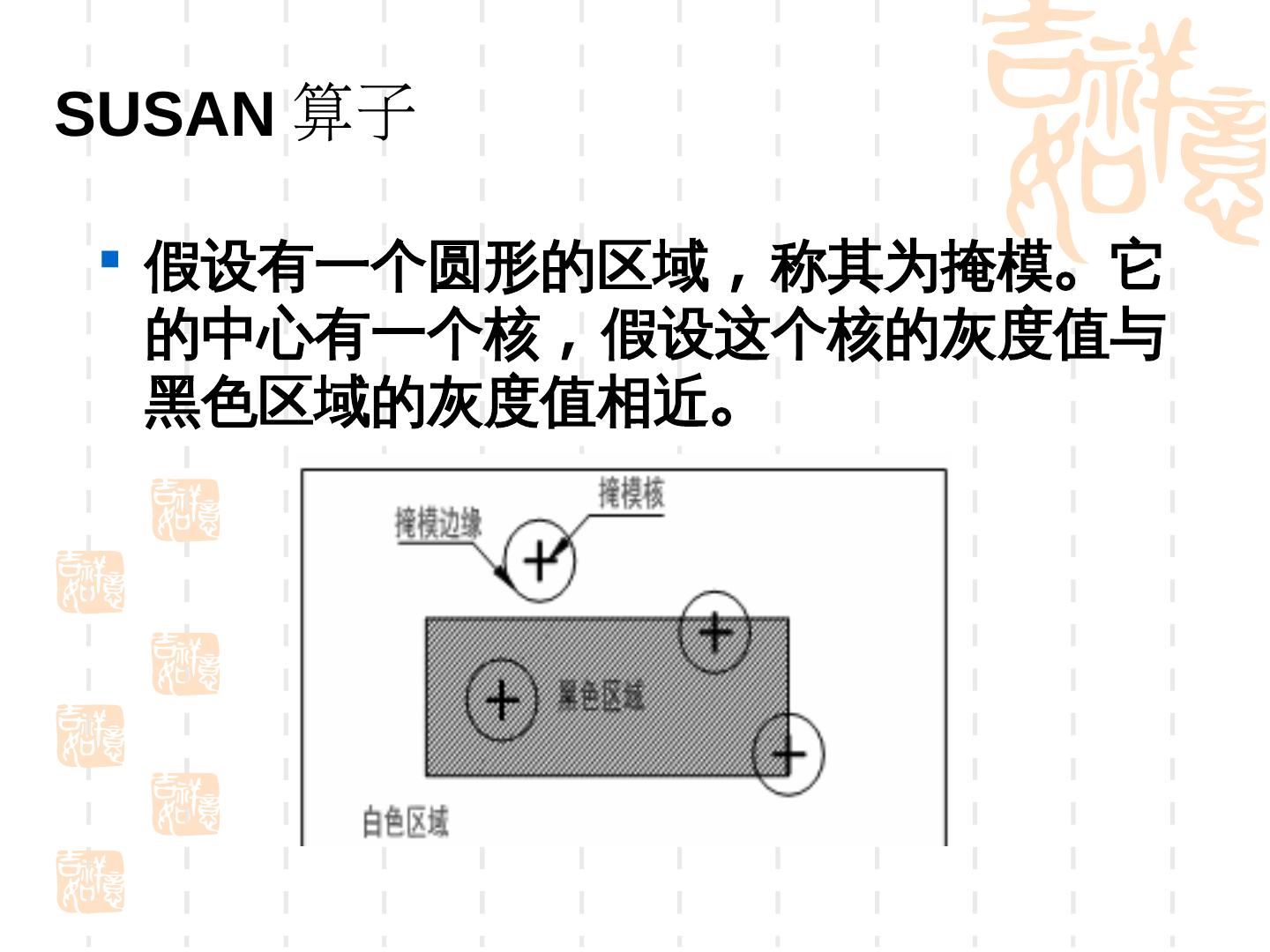
29 .SUSAN 算子 SUSAN 算法由 Smith S M 在 1997 年提 出 , 是一种基于结构元的点特征提取算子 . SUSAN 是“ Smallest Univalue Segment Assimilating Nucleus” 的 缩写 , 即同化核分割最小值。
3秒后跳转登录页面
去登陆

