展开查看详情
1 .第三章 图像处理基础
中国科技大学自动化系
曹 洋
�
2 . 3. 空域处理
图像空域处理
a. 线性滤波
b. 非线性滤波
c. 二值图像处理方法
数学形态学
连通成分标记
�
3 .空域滤波分类
按照分类方法的不同
数学形态分类
空域滤波器
线性滤波器 非线性滤波器
高通 低通 带通 最大值 最小值 中值
处理效果分类
钝化滤波器 锐化滤波器
�
4 .3.1 线性滤波
模板,也常称为:滤波器,掩模,是一个系数矩阵,大小
为 n*n, n 通常为奇数,如 3*3,5*5,9*9.
模板运算:假设原始图像上一点 f(x,y) ,其在变换图
像的映射为 g(x,y) =T[f(x,y)] 。 T 是一种变换操
作,定义在 (x,y) 的邻域,这邻域可能是以 (x,y) 为
中心的一个方形区域,也就是说 T 对 f(x,y) 及其邻
域都作用以产生 g(x,y) 。
在空间滤波、平滑、锐化等处理中,可以通过模板在图像
上作卷积的办法来实现。
�
5 .模板运算步骤 :
1. 将模板在图中漫游(卷积) 图像
2. 将模板中系数和图中对应的像素值相乘
卷积
3. 将所有的乘积相加
4. 将和赋值给模板中位置对应的像素
�
6 .常用的线性滤波器
均值滤波器(低通)
每一个像素值用其局部邻域内所有像素值的加权均值置换
1
h[i, j ]
M ( k ,l )N
f [k , l ]
�
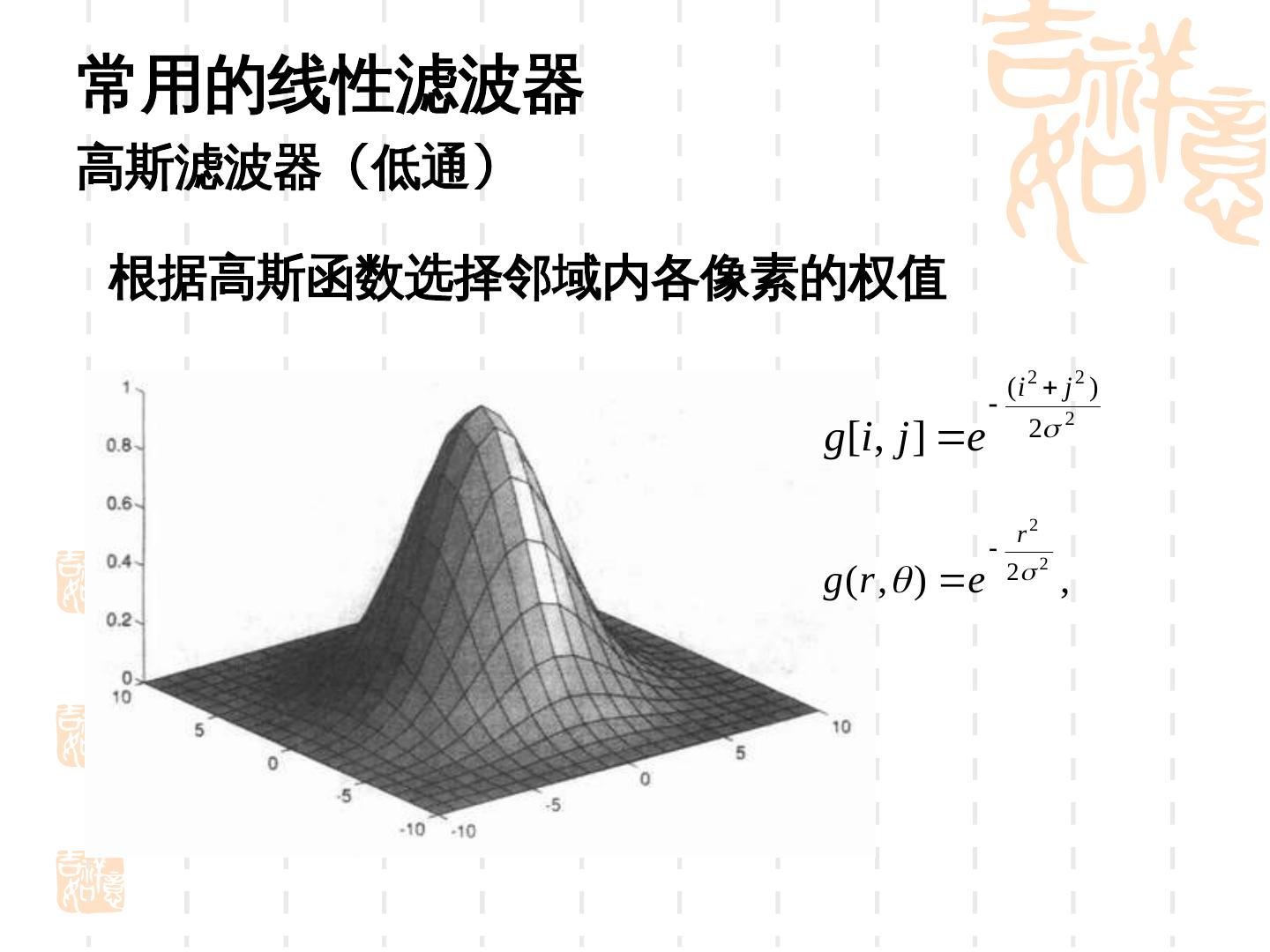
7 .常用的线性滤波器
高斯滤波器(低通)
根据高斯函数选择邻域内各像素的权值
(i 2 j 2 )
2
g[i, j ] e 2
r2
g (r , ) e 2 2 ,
�
8 .高斯平滑滤波器
高斯函数具有五个重要的性质 :
• 旋转对称性
在各个方向上的平滑是一致的
• 单调递减
邻域的影响随着距离的增加而减弱
• 傅立叶变换是其本身
保留所需信号
�
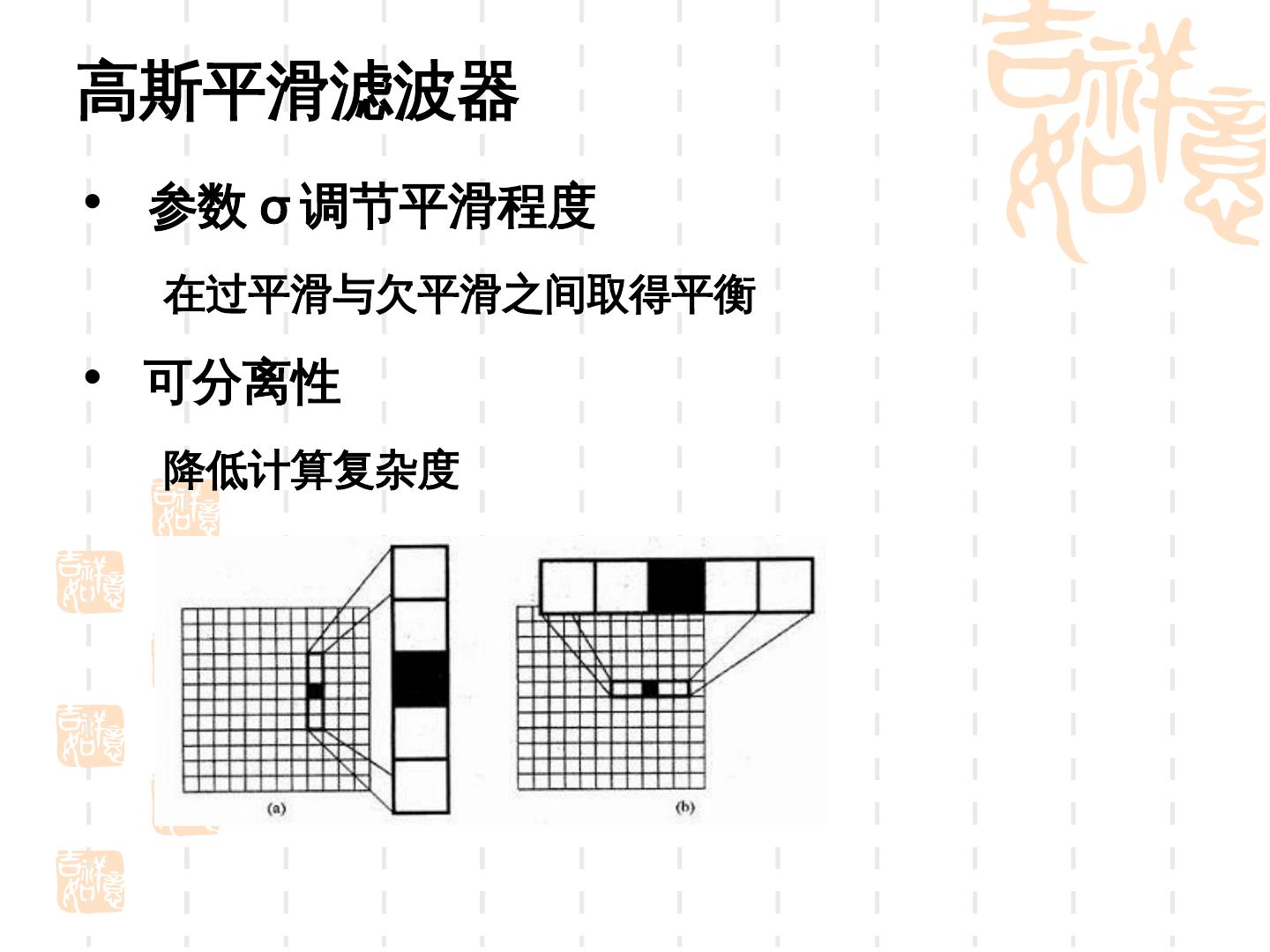
9 .高斯平滑滤波器
• 参数 σ 调节平滑程度
在过平滑与欠平滑之间取得平衡
• 可分离性
降低计算复杂度
�
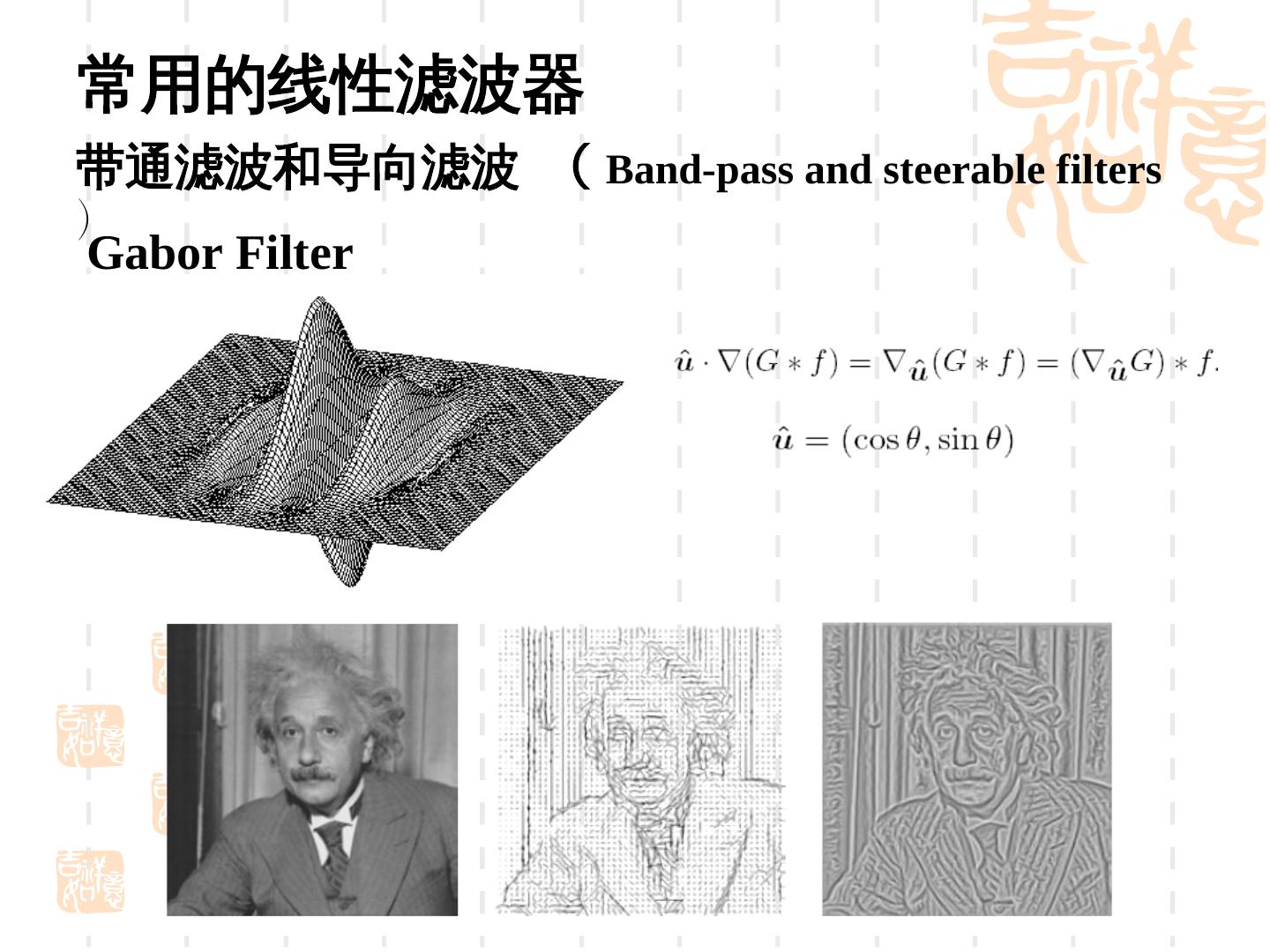
10 .常用的线性滤波器
带通滤波和导向滤波 ( Band-pass and steerable filters
)
Gabor Filter
�
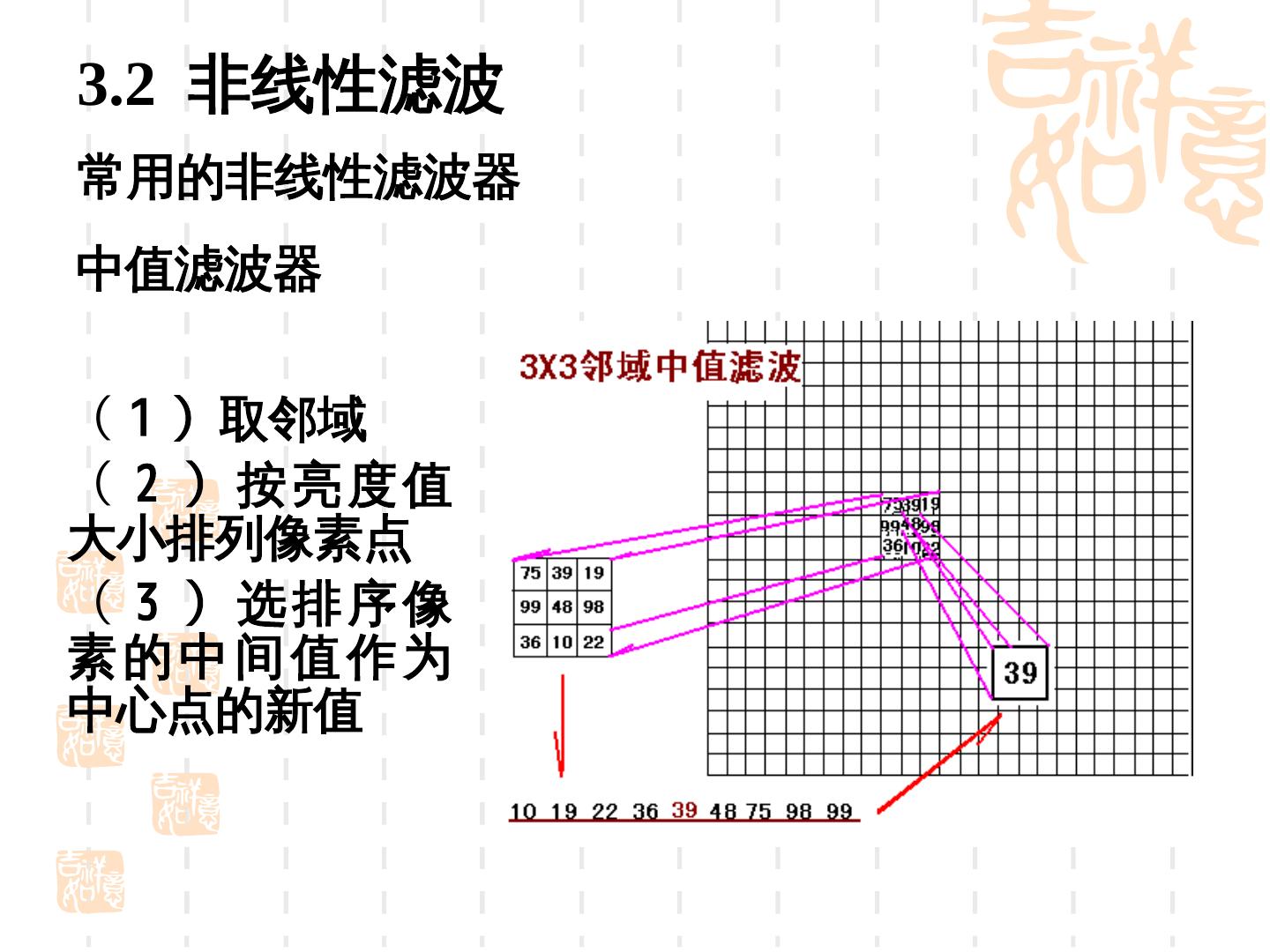
11 .3.2 非线性滤波
常用的非线性滤波器
中值滤波器
( 1 )取邻域
( 2 )按亮度值
大小排列像素点
( 3 )选排序像
素的中间值作为
中心点的新值
�
14 .常用的非线性滤波器
双边滤波器( bilateral filter )
高斯滤波器的不足
�
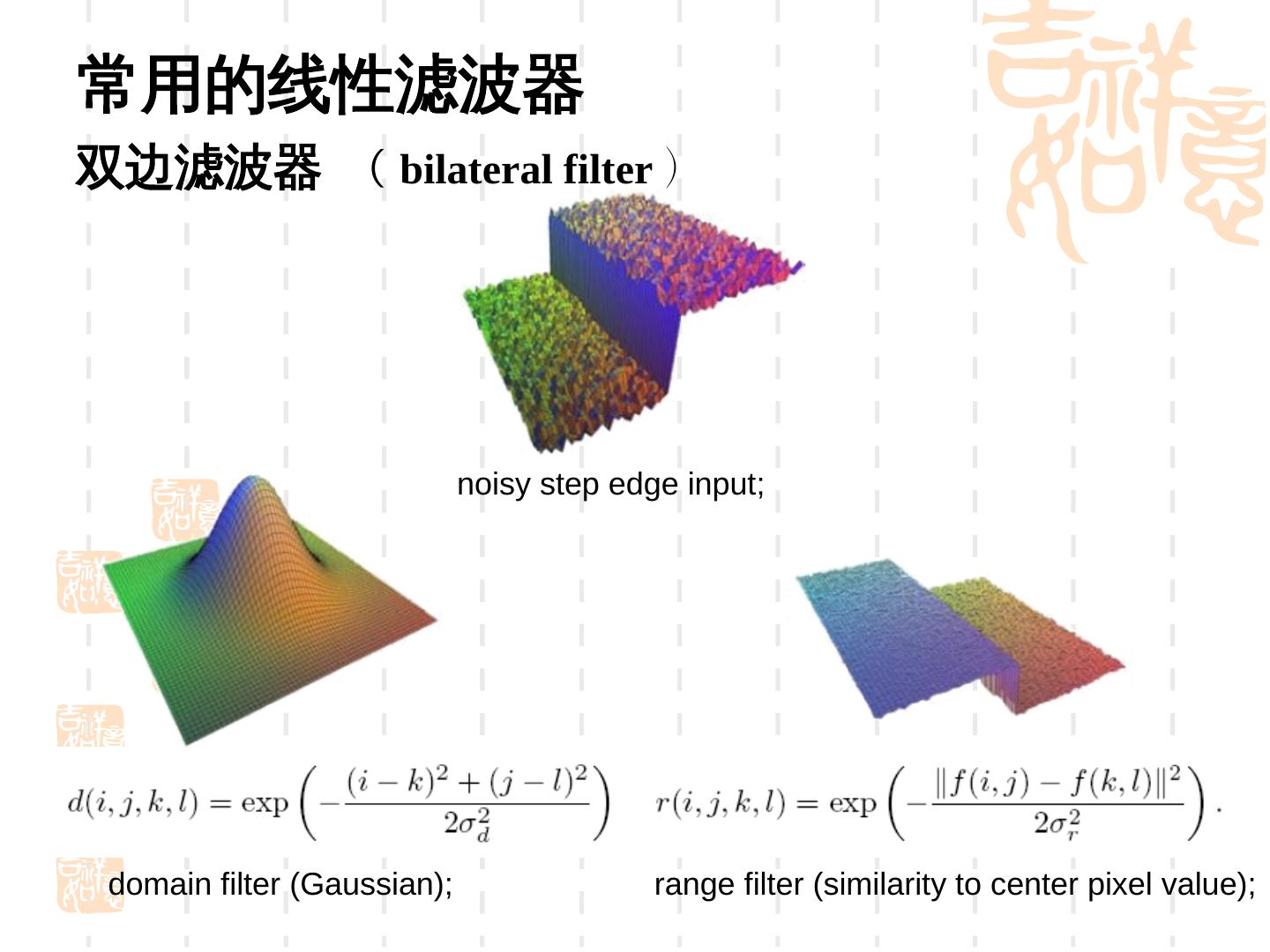
16 .常用的线性滤波器
双边滤波器 ( bilateral filter )
noisy step edge input;
domain filter (Gaussian); range filter (similarity to center pixel value);
�
18 . 图像引导滤波器
[6] K. He, J. Sun, and X. Tang. Guided image filtering. In
Proc. of ECCV, 2010.
�
22 .3.3 二值图像处理
二值图像
• 只有黑白两级灰度的图像
• 去掉无关信息的干扰 , 计算速度快
• 所需内存小 , 节省资源
• 算法可应用于灰度图象
• 适用于工业场合
•
�
23 .3.3.1 二值图像基本概念
( 1 )近邻:
4 邻点 (4-neighbors):neighbors):): 有公共边关系的两个像
素.
8 邻点 (8-neighbors):neighbors):): 两个像素至少共享一个
顶角 . 4 连通 (4-neighbors):connected):): 一个像素与其 4
邻点的关系
8 连通 (4-neighbors):connected):): 一个像素与其 8 邻点的
关系
�
24 . (2) 路径
路径 : 从像素到像素的一个像素序列
4 路径 : 像素与其近邻像素是 4 连通关系
8 路径 : 像素与其近邻像素是 8 连通关系
(3) 前景
图像中值为 1 的全部像素的集合,用 S 表示.
(4) 连通性
已知像素 p 和 q ,如果存在一条从 p 到 q 的路径,
且路径上的全部像素都包含在 S 中,则称 p 与 q 是连通的
.
�
25 .(5) 连通成份
一个像素集合 S ,如果 S 内的每一个像素与
集合内其它像素连通,则称该集合为一个连通成份
(6) 背景 `S ( S 的补集)中包含图像边界点
的所有连通成份的集合
洞 :`S 中所有非背景其它元
对物体和背景应使用不同的连通 . 如果对 S
使用 8 连通 , 则对 `S 应使用 4 连通
洞
S
�
26 .(7) 边界
S 的边界是 S 中与 `S 中有 4 连通关系的像素集合 S '
( 8) 内部
S 中不属于它的边界的像素集合 . S 的内部等于 S -neighbors):
S '
( 9) 包围
如果从 S 中任意一点到图像边界的 4 路径必须与区域 T
相交,则区域 T 包围区域 S (或 S 在 T 内)
边界
S 图像
内部 边界
S
包围
例:一幅二值图像
�
27 .3.3.2 数学形态学( mathematical mophology
)
图像分析与识别思想:基于形状
理论基础:集合论
作用:保持形状特征,同时简化图像
工具:结构元
�
28 .形态学算子 -neighbors):1
• 膨胀( d):ilation ):扩张图像区域
结构元原点是指定的,不一定是图像左上角
多种解释:向量、图像位移、结构元位移
A B { p | p p b, p A, b B}
A B Ab
bB
A B {x | Bˆ x A A}
�
29 .形态学算子 -neighbors):2
• 腐蚀( eros):ion ):
获得表示结构元所有出现位置的图像
AB p p b A, b B
AB A b
bB
AB p B p A
�