





- 快召唤伙伴们来围观吧
- 微博 QQ QQ空间 贴吧
- 文档嵌入链接
- 复制
- 微信扫一扫分享
- 已成功复制到剪贴板
汽车自动驾驶领域的传感器融合技术
从激光雷达、摄像头、毫米波雷达等方面论述了汽车自动驾驶中常用的传感器技术,以及汽车自动驾驶领域中传感器融合技术的发展。在此基础上,介绍了分布式、集中式、混合式等三种多传感器信息融合体系,给出了激光雷达 +摄像头、毫米波雷达 +摄像头的融合模型,并分析了加权平均、卡尔曼滤波、神经网络等融合算法。
展开查看详情
1 .Res ear ch· Ex plor ati on 研 究 · 探 索 汽车自动驾驶领域的 传感器融合技术 □ 石晏丞 □ 李 军 重庆交通大学 机电与车辆工程学院 重庆 4000 74 摘 要:从激光雷达、摄像头、毫米波雷达等方面论述了汽车自动驾驶中常用的传感器技术,以及汽车 自动驾驶领域中传感器融合技术的发展。在此基础上,介绍了分布式、集中式、混合式等三种多传感器信 息融合体系,给出了激光雷达 +摄像头、毫米波雷达 +摄像头的融合模型,并分析了加权平均、卡尔曼滤 波、神经网络等融合算法。 Abst ract :Fr om t he as pec ts ofl idar ,camer a, mi ll imet erwave r adar , et c.,t he s ens or t echnol ogyc ommonl yus ed i n aut omobi leaut onomousdr ivi ng wasdi scus sed,aswel last he devel opmentofs ens orf usi ont echnol ogyi nthef iel dofaut omobi leaut onomousdr ivi ng.Ont his bas is,t hree mul ti sens ori nfor mat ion f usi on s yst ems i ncl udi ng di str ibut ed, c ent ral iz ed, and hybr ids yst emswer eint roduc ed,andt hef usi onmodel ssuc hasl idar+c amer aandmi ll imet er waver adar+c amer awer ven,andt egi hef usi onal gor it hmsl ikewei ght edaver age,Kal manf il ter andneur alnet wor kwer eanal yzed. 关键词:汽车;自动驾驶;传感器;融合 Keywor ds:Aut omobi le;Aut onomousDr ivi ng;Sensor ;Fusi on 中图分类号:U471. 1;TP212. 9 文献标志码:A 文章编号: 1672-0555(2021)03-0001-07 的训练框架来提高感知的准确性,增强感知的容错 1 研究背景 率。道路、车道、障碍物等的识别,对于自动驾驶至 关重要,准确的识别可以使车辆在任何情况下都能 传感器的融合其实就是数据的融合,起源于 20 安全地作出反应。在感知识别中,高灵敏度传感器 世纪末。传感器的融合最开始运用在军事领域,曾 可以执行高精确的信息采集,同时伴随着高成本,使 用名为多源相关,后逐渐应用于工程领域,并有实际 车辆的生产成本大大增加。取而代之的是更多低成 成果体现应用价值。目前,传感器的融合成为一个 本设备的融合,从而达到预期的效果。数据融合需 研究热点。 要很好地预估融合信息的不确定性,以改善单个测 伴随着电子技术和控制技术的进步,在汽车自 量数据,增强数据源的质量,进而保证融合为一个更 动驾驶技术领域,目前最大的障碍是没有一个融合 精确的信号。当然,这通常无法通过一次测量得到。 国家自然科学基金资助项目(编号: 513 05472) 收稿时间: 2020-1 1 第一作者简介:石晏丞(1994—),男,硕士研究生,主要研究方向为图像识别技术 装备机械 2021No. 3 — 1—
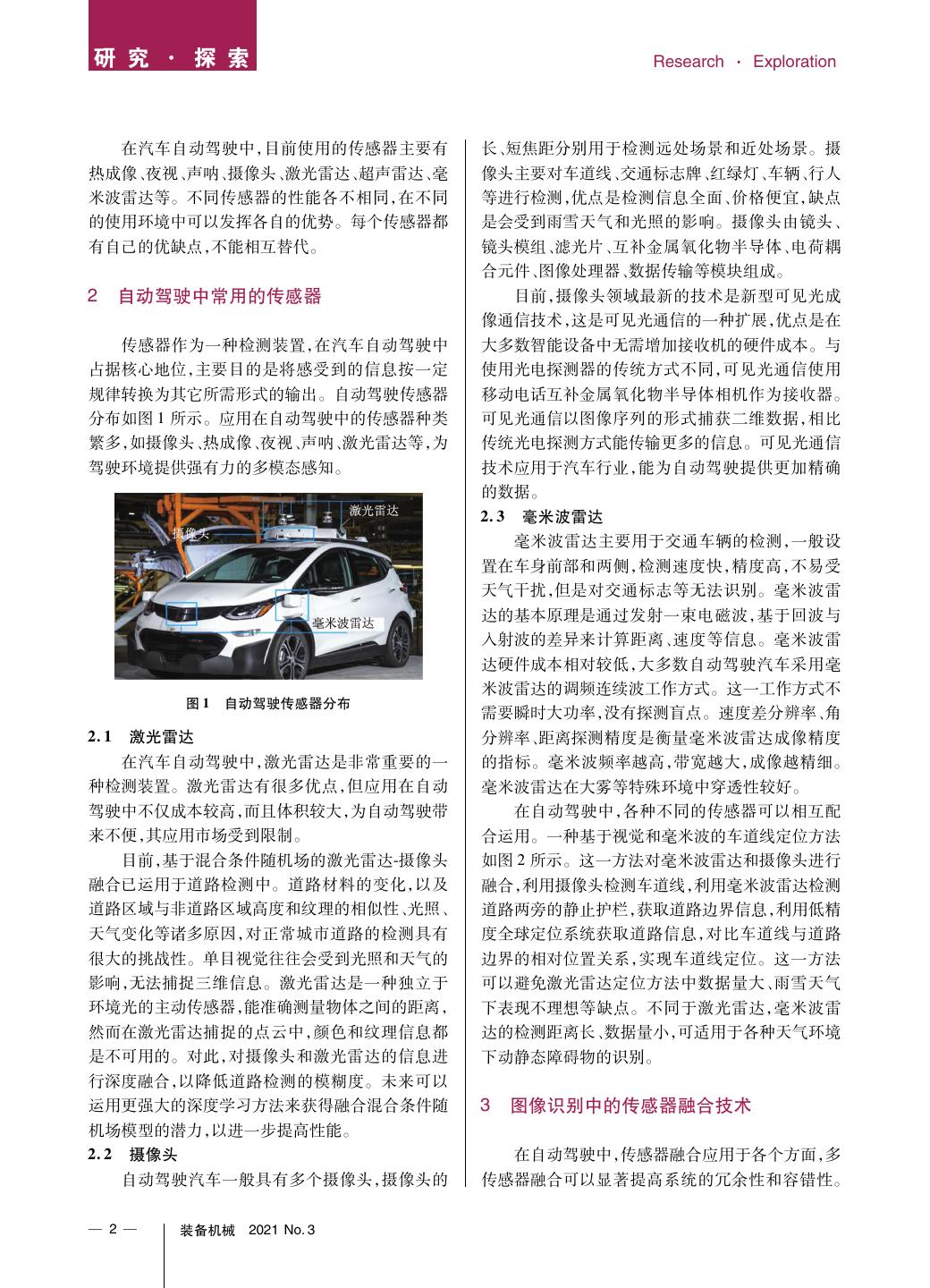
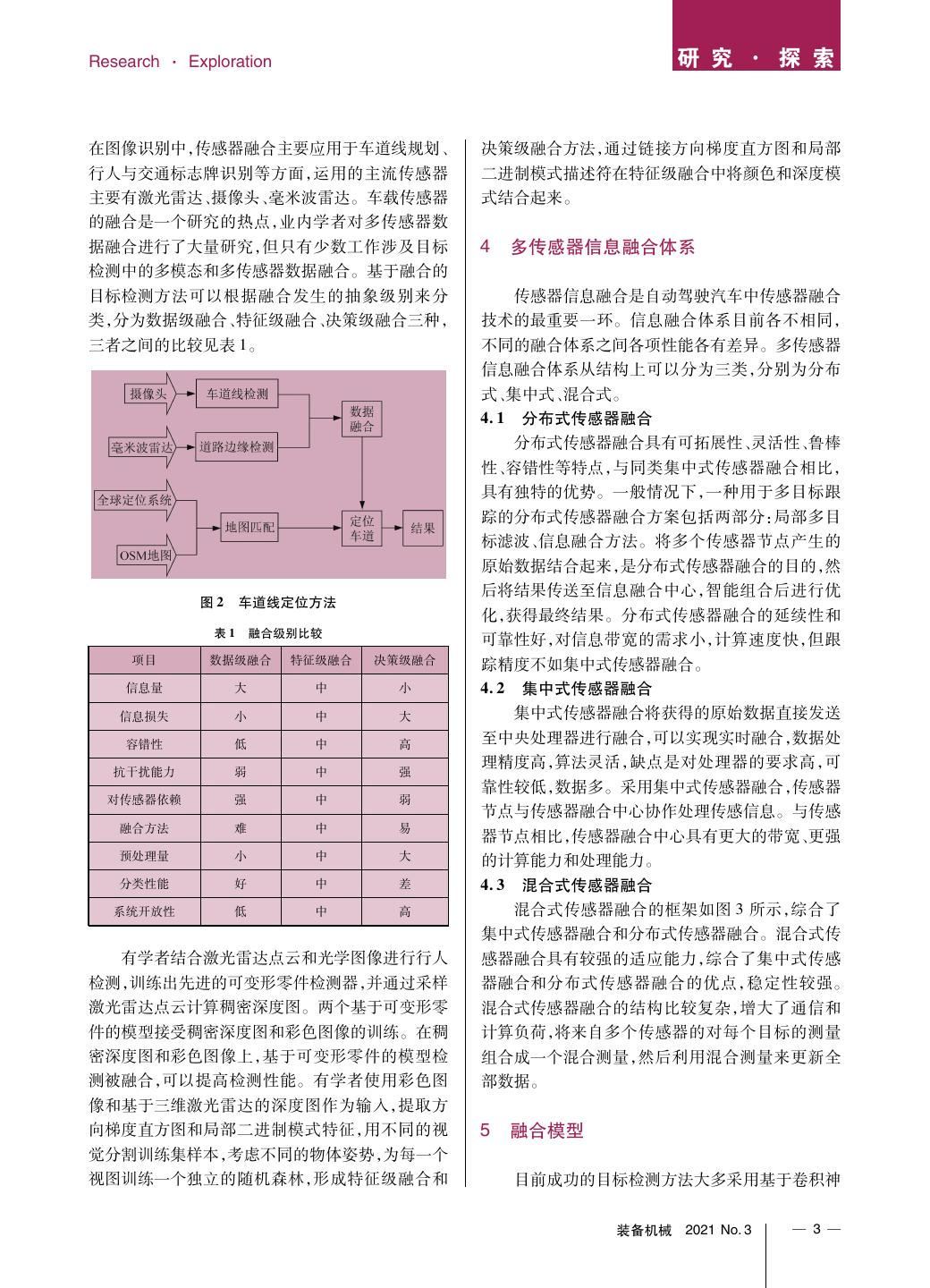
2 .研 究 · 探 索 Res ear ch· Ex plor ati on 在汽车自动驾驶中,目前使用的传感器主要有 长、 短焦距分别用于检测远处场景和近处场景。摄 热成像、夜视、声呐、摄像头、激光雷达、超声雷达、毫 像头主要对车道线、交通标志牌、红绿灯、车辆、行人 米波雷达等。不同传感器的性能各不相同,在不同 等进行检测,优点是检测信息全面、价格便宜,缺点 的使用环境中可以发挥各自的优势。每个传感器都 是会受到雨雪天气和光照的影响。摄像头由镜头、 有自己的优缺点,不能相互替代。 镜头模组、滤光片、互补金属氧化物半导体、电荷耦 合元件、图像处理器、数据传输等模块组成。 2 自动驾驶中常用的传感器 目前,摄像头领域最新的技术是新型可见光成 像通信技术,这是可见光通信的一种扩展,优点是在 传感器作为一种检测装置,在汽车自动驾驶中 大多数智能设备中无需增加接收机的硬件成本。与 占据核心地位,主要目的是将感受到的信息按一定 使用光电探测器的传统方式不同,可见光通信使用 规律转换为其它所需形式的输出。自动驾驶传感器 移动电话互补金属氧化物半导体相机作为接收器。 分布如图 1所示。应用在自动驾驶中的传感器种类 可见光通信以图像序列的形式捕获二维数据,相比 繁多,如摄像头、热成像、夜视、声呐、激光雷达等,为 传统光电探测方式能传输更多的信息。可见光通信 驾驶环境提供强有力的多模态感知。 技术应用于汽车行业,能为自动驾驶提供更加精确 的数据。 2. 3 毫米波雷达 毫米波雷达主要用于交通车辆的检测,一般设 置在车身前部和两侧,检测速度快,精度高,不易受 天气干扰,但是对交通标志等无法识别。毫米波雷 达的基本原理是通过发射一束电磁波,基于回波与 入射波的差异来计算距离、速度等信息。毫米波雷 达硬件成本相对较低,大多数自动驾驶汽车采用毫 米波雷达的调频连续波工作方式。这一工作方式不 图 1 自动驾驶传感器分布 需要瞬时大功率,没有探测盲点。速度差分辨率、角 2. 1 激光雷达 分辨率、距离探测精度是衡量毫米波雷达成像精度 在汽车自动驾驶中,激光雷达是非常重要的一 的指标。毫米波频率越高,带宽越大,成像越精细。 种检测装置。激光雷达有很多优点,但应用在自动 毫米波雷达在大雾等特殊环境中穿透性较好。 驾驶中不仅成本较高,而且体积较大,为自动驾驶带 在自动驾驶中,各种不同的传感器可以相互配 来不便,其应用市场受到限制。 合运用。一种基于视觉和毫米波的车道线定位方法 目前,基于混合条件随机场的激光雷达 摄像头 如图 2所示。这一方法对毫米波雷达和摄像头进行 融合已运用于道路检测中。道路材料的变化,以及 融合,利用摄像头检测车道线,利用毫米波雷达检测 道路区域与非道路区域高度和纹理的相似性、光照、 道路两旁的静止护栏,获取道路边界信息,利用低精 天气变化等诸多原因,对正常城市道路的检测具有 度全球定位系统获取道路信息,对比车道线与道路 很大的挑战性。单目视觉往往会受到光照和天气的 边界的相对位置关系,实现车道线定位。这一方法 影响,无法捕捉三维信息。激光雷达是一种独立于 可以避免激光雷达定位方法中数据量大、雨雪天气 环境光的主动传感器,能准确测量物体之间的距离, 下表现不理想等缺点。不同于激光雷达,毫米波雷 然而在激光雷达捕捉的点云中,颜色和纹理信息都 达的检测距离长、数据量小,可适用于各种天气环境 是不可用的。对此,对摄像头和激光雷达的信息进 下动静态障碍物的识别。 行深度融合,以降低道路检测的模糊度。未来可以 运用更强大的深度学习方法来获得融合混合条件随 3 图像识别中的传感器融合技术 机场模型的潜力,以进一步提高性能。 2. 2 摄像头 在自动驾驶中,传感器融合应用于各个方面,多 自动驾驶汽车一般具有多个摄像头,摄像头的 传感器融合可以显著提高系统的冗余性和容错性。 — 2— 装备机械 2021No. 3
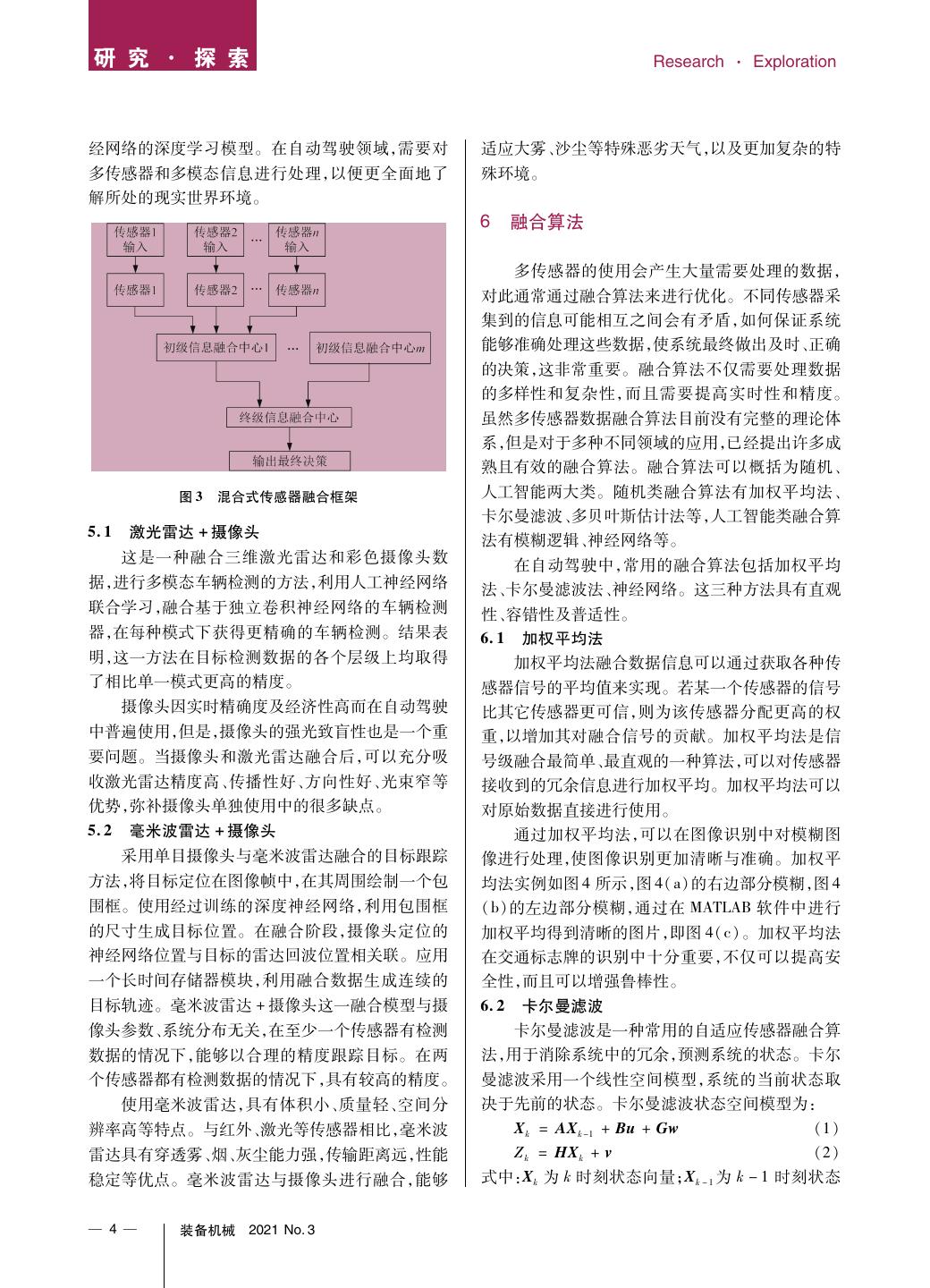
3 .Res ear ch· Ex plor ati on 研 究 · 探 索 在图像识别中,传感器融合主要应用于车道线规划、 决策级融合方法,通过链接方向梯度直方图和局部 行人与交通标志牌识别等方面,运用的主流传感器 二进制模式描述符在特征级融合中将颜色和深度模 主要有激光雷达、摄像头、毫米波雷达。车载传感器 式结合起来。 的融合是一个研究的热点,业内学者对多传感器数 据融合进行了大量研究,但只有少数工作涉及目标 4 多传感器信息融合体系 检测中的多模态和多传感器数据融合。基于融合的 目标检测方法可以根据融合发生的抽象级别来分 传感器信息融合是自动驾驶汽车中传感器融合 类,分为数据级融合、特征级融合、决策级融合三种, 技术的最重要一环。信息融合体系目前各不相同, 三者之间的比较见表 1。 不同的融合体系之间各项性能各有差异。多传感器 信息融合体系从结构上可以分为三类,分别为分布 式、集中式、混合式。 4. 1 分布式传感器融合 分布式传感器融合具有可拓展性、灵活性、鲁棒 性、容错性等特点,与同类集中式传感器融合相比, 具有独特的优势。一般情况下,一种用于多目标跟 踪的分布式传感器融合方案包括两部分:局部多目 标滤波、信息融合方法。将多个传感器节点产生的 原始数据结合起来,是分布式传感器融合的目的,然 后将结果传送至信息融合中心,智能组合后进行优 图 2 车道线定位方法 化, 获得最终结果。分布式传感器融合的延续性和 表 1 融合级别比较 可靠性好,对信息带宽的需求小,计算速度快,但跟 项目 数据级融合 特征级融合 决策级融合 踪精度不如集中式传感器融合。 信息量 大 中 小 4. 2 集中式传感器融合 信息损失 小 中 大 集中式传感器融合将获得的原始数据直接发送 容错性 低 中 高 至中央处理器进行融合,可以实现实时融合,数据处 理精度高,算法灵活,缺点是对处理器的要求高,可 抗干扰能力 弱 中 强 靠性较低,数据多。采用集中式传感器融合,传感器 对传感器依赖 强 中 弱 节点与传感器融合中心协作处理传感信息。与传感 融合方法 难 中 易 器节点相比,传感器融合中心具有更大的带宽、更强 预处理量 小 中 大 的计算能力和处理能力。 分类性能 好 中 差 4. 3 混合式传感器融合 系统开放性 低 中 高 混合式传感器融合的框架如图 3所示,综合了 集中式传感器融合和分布式传感器融合。混合式传 有学者结合激光雷达点云和光学图像进行行人 感器融合具有较强的适应能力,综合了集中式传感 检测,训练出先进的可变形零件检测器,并通过采样 器融合和分布式传感器融合的优点,稳定性较强。 激光雷达点云计算稠密深度图。两个基于可变形零 混合式传感器融合的结构比较复杂,增大了通信和 件的模型接受稠密深度图和彩色图像的训练。在稠 计算负荷,将来自多个传感器的对每个目标的测量 密深度图和彩色图像上,基于可变形零件的模型检 组合成一个混合测量,然后利用混合测量来更新全 测被融合,可以提高检测性能。有学者使用彩色图 部数据。 像和基于三维激光雷达的深度图作为输入,提取方 向梯度直方图和局部二进制模式特征,用不同的视 5 融合模型 觉分割训练集样本,考虑不同的物体姿势,为每一个 视图训练一个独立的随机森林,形成特征级融合和 目前成功的目标检测方法大多采用基于卷积神 装备机械 2021No. 3 — 3—
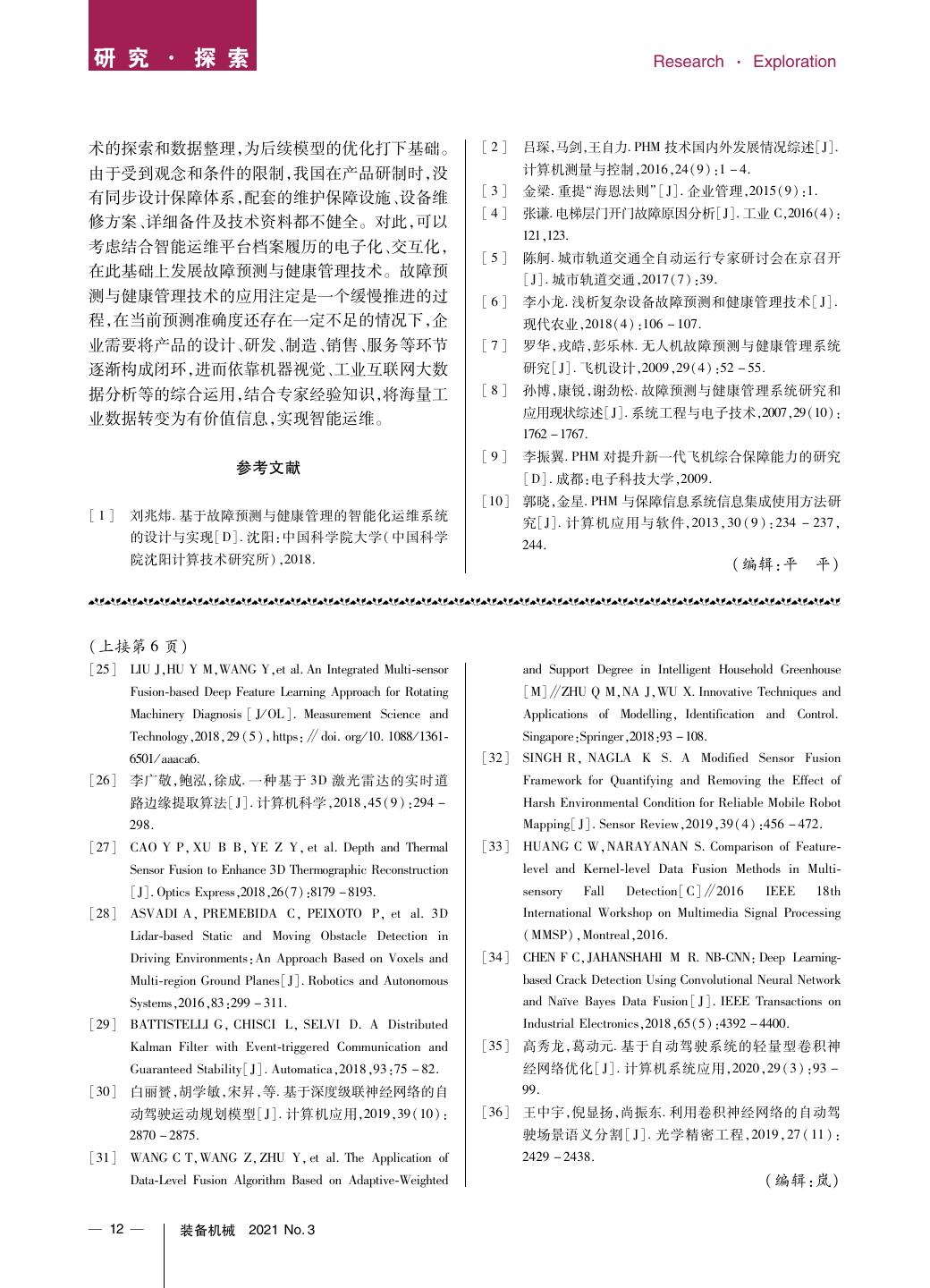
4 .研 究 · 探 索 Res ear ch· Ex plor ati on 经网络的深度学习模型。在自动驾驶领域,需要对 适应大雾、沙尘等特殊恶劣天气,以及更加复杂的特 多传感器和多模态信息进行处理,以便更全面地了 殊环境。 解所处的现实世界环境。 6 融合算法 多传感器的使用会产生大量需要处理的数据, 对此通常通过融合算法来进行优化。不同传感器采 集到的信息可能相互之间会有矛盾,如何保证系统 能够准确处理这些数据,使系统最终做出及时、正确 的决策,这非常重要。融合算法不仅需要处理数据 的多样性和复杂性,而且需要提高实时性和精度。 虽然多传感器数据融合算法目前没有完整的理论体 系,但是对于多种不同领域的应用,已经提出许多成 熟且有效的融合算法。融合算法可以概括为随机、 图 3 混合式传感器融合框架 人工智能两大类。随机类融合算法有加权平均法、 卡尔曼滤波、多贝叶斯估计法等,人工智能类融合算 5. 1 激光雷达 +摄像头 法有模糊逻辑、神经网络等。 这是一种融合三维激光雷达和彩色摄像头数 在自动驾驶中,常用的融合算法包括加权平均 据,进行多模态车辆检测的方法,利用人工神经网络 法、卡尔曼滤波法、神经网络。这三种方法具有直观 联合学习,融合基于独立卷积神经网络的车辆检测 性、容错性及普适性。 器, 在每种模式下获得更精确的车辆检测。结果表 6. 1 加权平均法 明,这一方法在目标检测数据的各个层级上均取得 加权平均法融合数据信息可以通过获取各种传 了相比单一模式更高的精度。 感器信号的平均值来实现。若某一个传感器的信号 摄像头因实时精确度及经济性高而在自动驾驶 比其它传感器更可信,则为该传感器分配更高的权 中普遍使用,但是,摄像头的强光致盲性也是一个重 重, 以增加其对融合信号的贡献。加权平均法是信 要问题。当摄像头和激光雷达融合后,可以充分吸 号级融合最简单、最直观的一种算法,可以对传感器 收激光雷达精度高、传播性好、方向性好、光束窄等 接收到的冗余信息进行加权平均。加权平均法可以 优势,弥补摄像头单独使用中的很多缺点。 对原始数据直接进行使用。 5. 2 毫米波雷达 +摄像头 通过加权平均法,可以在图像识别中对模糊图 采用单目摄像头与毫米波雷达融合的目标跟踪 像进行处理,使图像识别更加清晰与准确。加权平 方法,将目标定位在图像帧中,在其周围绘制一个包 均法实例如图 4所示,图 4(a )的右边部分模糊,图 4 围框。使用经过训练的深度神经网络,利用包围框 (b)的左边部分模糊,通过在 MATLAB软件中进行 的尺寸生成目标位置。在融合阶段,摄像头定位的 加权平均得到清晰的图片,即图 4(c )。加权平均法 神经网络位置与目标的雷达回波位置相关联。应用 在交通标志牌的识别中十分重要,不仅可以提高安 一个长时间存储器模块,利用融合数据生成连续的 全性,而且可以增强鲁棒性。 目标轨迹。毫米波雷达 +摄像头这一融合模型与摄 6. 2 卡尔曼滤波 像头参数、系统分布无关,在至少一个传感器有检测 卡尔曼滤波是一种常用的自适应传感器融合算 数据的情况下,能够以合理的精度跟踪目标。在两 法,用于消除系统中的冗余,预测系统的状态。卡尔 个传感器都有检测数据的情况下,具有较高的精度。 曼滤波采用一个线性空间模型,系统的当前状态取 使用毫米波雷达,具有体积小、质量轻、空间分 决于先前的状态。卡尔曼滤波状态空间模型为: 辨率高等特点。与红外、激光等传感器相比,毫米波 Xk =AXk-1 +Bu+Gw (1) 雷达具有穿透雾、烟、灰尘能力强,传输距离远,性能 Zk =HXk +v (2) 稳定等优点。毫米波雷达与摄像头进行融合,能够 式中:Xk为 k时刻状态向量;Xk-1为 k-1时刻状态 — 4— 装备机械 2021No. 3
5 .Res ear ch· Ex plor ati on 研 究 · 探 索 向量;A为状态转移矩阵;B为输入转换矩阵;G为 ^ — Pk =(1-KkC)Pk (7) 过程噪声转移矩阵;u为输入向量;w为过程中噪声 式中:Pk为 k时刻估计协方差;Pk-1为k-1时刻估计 向量;Zk为 k时刻系统测量信息;H 为测量矩阵;v 协方差;Kk为卡尔曼增益;C为观测转移矩阵;∧ 表 为测量噪声向量。 示先验概率分布;—表示后验概率分布。 在预测阶段,估计值与观测值一同更新。如果 有两个传感器分别发送数据,那么在利用第二个传 感器的观测值来更新预测值前,可以将第一个传感 器的读取值作为先验信息。 卡尔曼滤波在图像识别中是一种常见的融合算 法,可以进行降噪,并增强鲁棒性。卡尔曼滤波虽然 是数据层面的融合,但是对于传感器的融合而言非 常重要。 6. 3 神经网络 不同于卡尔曼滤波,神经网络提供非线性传递 函数和并行处理能力,可以帮助执行图像融合。神 经网络由称为神经元的处理节点连接而成。建立神 经网络数据融合模型,根据多传感器数据输入和输 出之间的关系,分配神经元和互连权值。神经网络 既有多层前馈型,也有递归型。 神经网络融合输出信号和输入信号,计算相应 的权重 y : y=∑ wix i (8) 式中:wi为权重;x i为传感器数据。 传统神经网络将图像一层一层映射,最后进行 特征提取。目前,多用卷积神经网络进行融合。卷 积神经网络可以看作是特征提取与分类器的结合 体,单从各个层的映射来看,类似于特征提取的过 程,提取不同层次的特征。神经网络的容错性很强, 能够用于复杂的非线性映射环境。神经网络强大的 容错性及自学习、自组织、自适应能力等特性,满足 多传感器数据融合技术处理的要求。神经网络在数 据模型中,主要根据当前系统所接受的样本相似性 图 4 加权平均法实例 确定分类标准,这一过程表征为网络的权值分布。 w、v的协方差矩阵分别为 Qk、Rk。 可以利用神经网络的信号处理能力和自动推理功 利用卡尔曼滤波进行的状态估计有两个阶段, 能,实现多传感器数据融合。 预测阶段为: ^ X ^ 7 结束语 k =AXk-1 +Bu (3) Pk =APk-1AT +Qk (4) 笔者介绍了汽车自动驾驶中常用的传感器、传 更新阶段为: — — 感器融合技术,以及融合算法。目前,各种传感器融 Kk =PkCT (CPkCT +Rk)-1 (5) 合技术主要实现信息数据的融合,通过算法的配合 ^ X — k =Xk +Kk( — Zk -CXk) (6) 提高置信度和分辨率,增强系统的鲁棒性,并提高容 装备机械 2021No. 3 — 5—
6 .研 究 · 探 索 Res ear ch· Ex plor ati on 错率。传感器的融合既有相同种类的融合,也有考 J our nalo fAd van cedMa nuf act uri ngTe chn olo gy,2 017,9 0: 虑兼容性的融合。 2 839-2 847 . [1 1] KARI M S,ZHANG Y,YI N S L,e tal .Impa cto f 未来,传感器融合会更多向以下几个方面发展: Co mpr ess eda ndDo wn sca ledTr ain ingI mag eso nVe hic le 第一,通过对算法的优化提高实时性;第二,使传感 De tec ti oni nRe mot eSe nsi ngI mag ery[J].Mu lti medi a 器具有预判能力,提高在复杂环境下工作的准确性; To olsa ndApp lic ati ons ,201 9,7 8:32 565-32583. 第三,避免各种算法之间产生干扰,增强鲁棒性。 [1 2] YANGXS,ZHANG W A,CHEN M ZQ,e tal .Hy bri d Se que nti alFus ion Es ti mat ionf orAs ync hro nousSe nso r 参考文献 Ne two rk Bas edTa rge tTr acki ng[J ].I EEE Tr ans act ions o nCo ntr olSy ste msTe chn olo gy, 2016, 25(2): 669-676. [1] 刘军,袁俊,蔡骏宇,等.基于 GPS/ INS和线控转向的 [1 3] LI UYX,ZHANSP,CAOGT,e tal .Th eor eti calDe sig n 农业机械自动驾驶系统[J ].农业工程学报,2 016,3 2 o fPl asmo nicRe fra cti veI nde xSe nso rBa sedo ntheFi xed (1): 46-53. Ba ndDe tec ti on[J/ OL].I EEEJ our nalo fSe lec tedTo pic s [2] 戴荣健,丁川,鹿应荣,等.自动驾驶环境下车辆轨迹 i nQua ntu mEl ect roni cs,201 9,2 5(2),ht tps :∥do i.o rg/ 及交通信号协同控制[J ].汽车安全与节能学报, 201 9, 1 0.110 9/J STQE, 2018. 2827 661. 1 0(4): 531-5 39. [1 4] 赖旭东,李咏旭,陈佩奇,等.机载激光雷达技术现状 [3] I SERMANNR.Fa ult t ol era ntCo mpo nen tsf orAu toma ti c 及展望[J ].地理空间信息, 2017, 15(8): 1-4, 9. Dr ivi ngAu tomo bil es—S omeBa sicS tru ctu resa ndEx amp les [1 5] 唐铂,李振华,王春勇,等.线阵扫描三维成像激光雷 [M]∥I SERMANNR. Fa hre ras sis tenz sys teme 2016. 达系统[J ].激光与红外, 201 7,4 7(1 1): 1358-136 4. Wi esba den:Spr ing erVi ewe g,2018: 209-23 4. [1 6] 赵翔,杨明,王春香,等.基于视觉和毫米波雷达的车 [4] 宋欣瑞,张宪琦,张展,等.多传感器数据融合的复杂 道级定位方法[J ].上海交通大学学报,20 18,52(1): 人体活动识别[J ].清华大学学报(自然科学版), 202 0, 3 3-38. 6 0(1 0): 814-8 21. [1 7] 马得花,闫宏亮.全卷积神经网络的车辆点云目标精 [5] ALIKOA,I LIC N,S TANKOVI CM S ,eta l.Co nse nsu s 细化检测[J ].测绘科学, 202 0,4 5(3): 95-102. b ase d Di st ri but ed Ad apt iv e Ta rge tTr ack ingi n Ca mer a [1 8] 陈贵宾,高振海,何磊.车载三维激光雷达外参数的分 Ne two rksUs ingI nte gra tedPr oba bil is ti cDa taAs soc iat in[J o / 步自动标定算法[J ].中国激光,2017,4 4(10):249- OL]. EURAS IPJ our nalo nAd van cesi nSi gna lPr oce ssi ng, 2 55. 2 018, 13, htt ps: ∥do i.o rg/ 10. 118 6/s 136 34 018 053 4z . [1 9] DURRANT WHYTEH,HENDERS ON TC.Mul ti sen sor [6] FENGX,LAI Z L,YU H Q.A No vel Pa ral le l Da taFus ion[M]∥ SI CILI ANO B,KHATI BO.Spr ing er Ob jec tt rac kingBe hav iorAl gor it hm Ba sedo nDy nami cs Ha ndbo oko fRo bot ics .Cha m:Sp ring er, 2016: 867-896. f orDa taCl ust eri ng[J ].So ftCo mput ing ,2020, 24: 226 5- [2 0] PREMEBI DAC,CARREI RA J ,BATI STA J ,eta l. 2 285. Pe des tr ianDe tec ti onCo mbi nin gRGBa ndDe nseLI DAR [7] XUXM,QU L,S ONG JT,e tal .A S imp lea ndVi sua l Da ta[C]∥ 2 014I EEE/ RSJI nte rna ti ona lCo nfe ren ceo n Ap pro ach f or En ant io sel ect iv e Re cog nit io n t hro ugh I nte ll ig entRo bot san dSy ste ms, Chi cag o,2 014 . S upr amo lec ula rGe lswi thS pec if icS ele cti vi ty[J ].Ch emi cal [2 1] 柯艳国,王雄奇,魏新,等.一种基于图优化的实时 3D Co mmu nic ati ons ,20 19, 55(6 6): 987 3-9 876 . 激光 SLAM算法[J ].机电一体化, 202 0,2 6(Z1): 31- [8] CHENX,LI U L,DENG Y B,e tal .Ve hic leDe tec ti on 3 7. Ba sedo n Vi sua lAt te nti on Me cha nis m a nd Ada boo st [2 2] TELIS, CAHYADIW A,CHUNG Y H.Opt ica lCa mer a Ca sca deCl ass if ieri nInt ell ig entTr ans por tat ionSy ste ms Co mmu nic ati on: Mo tio n o ver Ca mer a[J ]. I EEE [J/ OL].Opt ica lan dQu ant um El ect roni cs,2 019,5 1, Co mmu nic ati onsMa gaz ine ,201 7,55(8): 156-162. ht tps :∥do i.o rg/ 10. 1007/ s110 82 019 1977 7. [2 3] WANGZD,WANG D,SHEN B,e tal .Ce ntr ali zed [9] CHENJ ,XUW Q,XU H T,e tal .Fa stVe hic leDe tec ti on Se cur it yg uar ant eedFi lt eri ngi nMu lti rat eS ens orFus ion Us ingaDi spa rit yPr oje cti onMe tho d[J ].I EEETr ans act io ns un derDe cept io n At tac ks[J].J our nalo fth eFr ankl in o nIn tel li gen tTr ans por tat io nSy ste ms, 201 8,1 9(9): 280 1- I nst it ute ,201 7,35 5(1): 406-42 0. 2 813. [2 4] 杨智博,杨春山,邓自立.面向跟踪系统的多传感器信 [10] CARREONA,BALTAZAR A,TREES ATAYAPUN C. 息融合鲁棒保性能协方差交叉 Ka lma n估计方法[J ]. De vel opme nto fa Mo del f ree Fo rce Co ntr oll erf orS oft 电子学报, 2017, 45(7): 1627-16 36. Co nta cto fanUl tr aso nicTe stPr obe[J ].Th eIn ter nat io nal (下转第 12页) — 6— 装备机械 2021No. 3
7 .研 究 · 探 索 Res ear ch· Ex plor ati on 术的探索和数据整理,为后续模型的优化打下基础。 [2] 吕琛, 马剑, 王自力. PHM技术国内外发展情况综述[J ]. 由于受到观念和条件的限制,我国在产品研制时,没 计算机测量与控制, 201 6,24(9): 1-4. [3] 金梁.重提“海恩法则”[J ].企业管理, 2015(9): 1. 有同步设计保障体系,配套的维护保障设施、设备维 [4] 张谦. 电梯层门开门故障原因分析[J ].工业 C, 201 6(4): 修方案、详细备件及技术资料都不健全。对此,可以 1 21, 123. 考虑结合智能运维平台档案履历的电子化、交互化, [5] 陈舸.城市轨道交通全自动运行专家研讨会在京召开 在此基础上发展故障预测与健康管理技术。故障预 [J ].城市轨道交通, 201 7(7): 39. 测与健康管理技术的应用注定是一个缓慢推进的过 [6] 李小龙.浅析复杂设备故障预测和健康管理技术[J ]. 程,在当前预测准确度还存在一定不足的情况下,企 现代农业, 2018(4): 106-1 07. 业需要将产品的设计、研发、制造、销售、服务等环节 [7] 罗华,戎皓,彭乐林.无人机故障预测与健康管理系统 逐渐构成闭环,进而依靠机器视觉、工业互联网大数 研究[J ].飞机设计, 200 9,29(4): 52-55. 据分析等的综合运用,结合专家经验知识,将海量工 [8] 孙博,康锐,谢劲松.故障预测与健康管理系统研究和 业数据转变为有价值信息,实现智能运维。 应用现状综述[J ].系统工程与电子技术, 200 7,2 9(1 0): 1 762-1 767 . [9] 李振翼.PHM对提升新一代飞机综合保障能力的研究 参考文献 [D].成都:电子科技大学, 2009. [1 0] 郭晓, 金星. PHM与保障信息系统信息集成使用方法研 [1] 刘兆炜.基于故障预测与健康管理的智能化运维系统 究[J ].计 算 机应 用与 软 件,2 013,3 0(9):234-237, 的设计与实现[D].沈阳:中国科学院大学(中国科学 2 44. 院沈阳计算技术研究所), 2018. (编辑:平 平) 檯檯檯檯檯檯檯檯檯檯檯檯檯檯檯檯檯檯檯檯檯檯檯檯檯檯檯檯檯檯檯檯檯檯檯檯檯檯檯檯檯檯檯檯檯檯 (上接第 6页) [25] LI UJ, HUYM, WANGY, eta l.AnI nte gra tedMu lti s ens or a ndS upp ortDe gre einI nte ll ig entHo use hol dGr een hou se Fu sio nb ase dDe epFe atu reLe arn ingAp pro achf orRo tat ing [M]∥ZHUQM,NAJ ,WUX.I nno vat iv eTe chn iqu esa nd Ma chi ner yDi agn oss[J/ i OL].Me asu reme ntS cie ncea nd Ap pli cat io nso f Mo del li ng,I den tif ic ati ona nd Co ntr ol. Te chn olo gy, 201 8,2 9(5),h ttp s:∥d oi.o rg/ 10.1 088/ 136 1 S ing apo re: Spr ing er, 201 8:9 3-1 08. 6 501/ aaa ca6. [3 2] SI NGHR,NAGLA K S.A Mo dif iedSe nso rFus ion [26] 李广敬,鲍泓,徐成.一种基于 3D激光雷达的实时道 Fr ame wor kfo rQua nti fy inga ndRe mov ingt heEf fec tof 路边缘提取算法[J ].计算机科学, 2018, 45(9): 294- Ha rshEnv iro nme nta lCo ndi ti onf orRe li abl eMo bil eRo bot 2 98. Ma ppi ng[J ].Se nso rRe vie w,201 9,39(4): 456-472. [27] CAOYP,XU B B,YE ZY,e tal .De ptha ndTh erma l [3 3] HUANGCW,NARAYANAN S.Co mpa ris ono fFe atur e S ens orFu sio ntoEn han ce3DTh ermo gra phi cRe con str uct io n l eve lan dKe rne ll eve lDa taFu sio nMe tho dsi n Mul ti [J ].Op tic sEx pre ss, 201 8,2 6(7): 817 9-8 193. s ens ory Fa ll De tec ti on[C]∥20 16 I EEE 18t h [28] AS VADIA,PREMEBI DA C,PEI XOTO P,e tal .3D I nte rna ti ona lWo rks hopo nMul ti med iaSi gna lPr oce ssi ng Li dar ba sedS tat ica nd Mo vin g Ob sta cle De tec ti oni n (MMSP),Mo ntr eal ,20 16. Dr ivi ngEn vir onme nt:AnAp s pro achBa sedo nVo xel san d [3 4] CHENFC,J AHANS HAHIM R.NB CNN:De epLe arn ing Mu lti r egi onGr oun dPl ane s[J ].Ro bot ic san dAu ton omo us b ase dCr ackDe tec ti onUs ingCo nvo lut io nalNe ura lNe two rk S yst ems ,20 16, 83: 299-3 11. a ndNa veBa yesDa taFu sio n[J ].I EEETr ans act io nso n [29] BATTI STELLIG,CHI SCIL,SELVID.A Di st ri but ed I ndu str ialEl ect ron ics ,20 18, 65(5): 439 2-4 400. Ka lma nFi lt erwi thEv ent t ri gge redCo mmuni cat iona nd [3 5] 高秀龙,葛动元.基于自动驾驶系统的轻量型卷积神 Gu ara nte edSt abi li ty[J ].Au toma tic a,20 18, 93: 75-8 2. 经网络优化[J ].计算机系统应用, 202 0,2 9(3):93- [30] 白丽?, 胡学敏,宋癉,等.基于深度级联神经网络的自 9 9. 动驾驶运动规划模型[J ].计算机应用, 201 9,3 9(1 0): [3 6] 王中宇,倪显扬,尚振东.利用卷积神经网络的自动驾 2 870-2 875. 驶场景语义分割[J ].光学精密工程,2019,27(11): [31] WANGCT,WANG Z,ZHU Y,e tal .Th eAp pli cat io nof 2 429-2 438. Da ta Lev elFu sio nAl gor it hm Ba sedo nAd apt iv eWe igh ted (编辑:岚) — 12— 装备机械 2021No. 3
3秒后跳转登录页面
去登陆

