展开查看详情
1 .基于深度学习的End-to-end自动
驾驶方案
郁浩
�
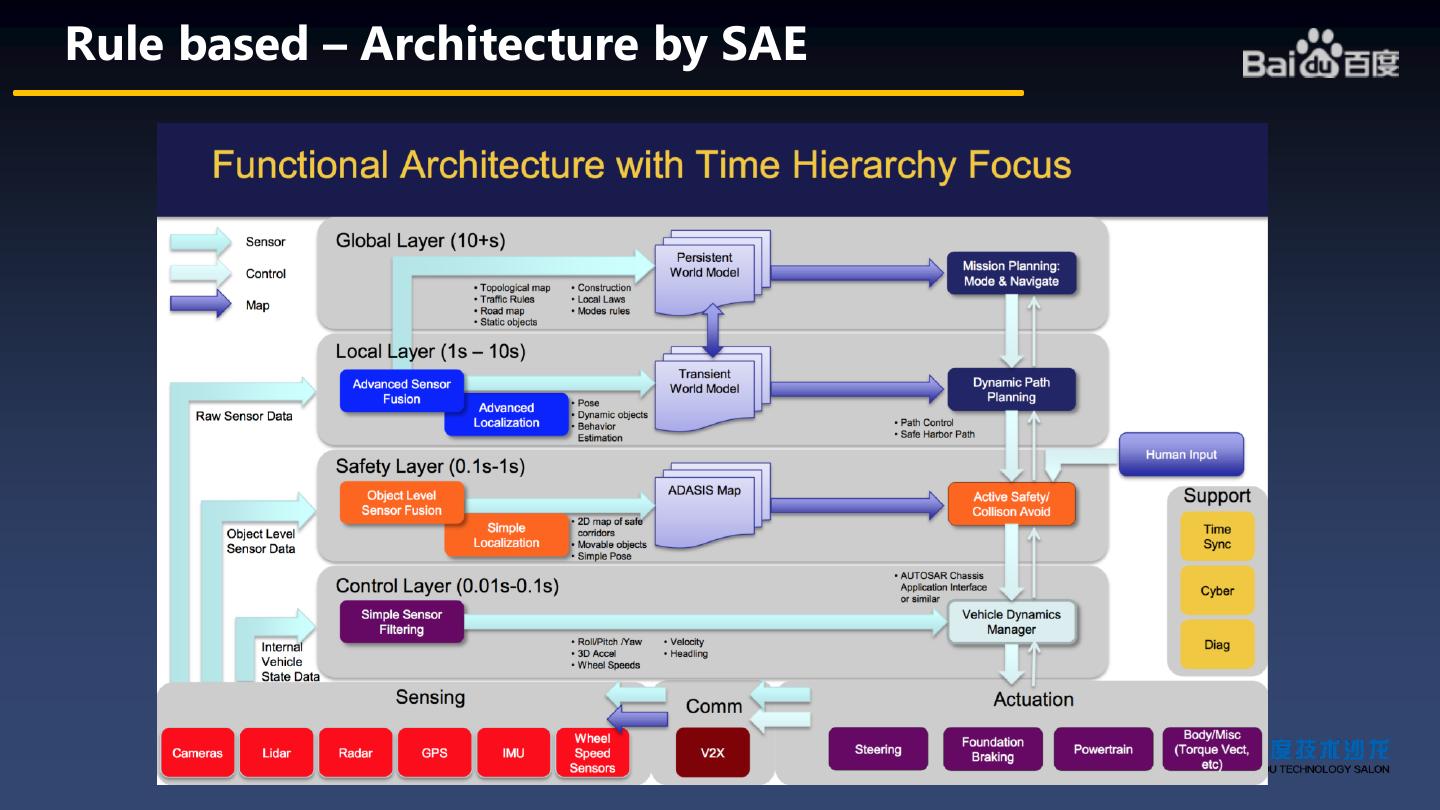
3 .Rule based
World
model
感知 决策
传感器 控制
车辆
�
4 .Rule based – Architecture by SAE
�
5 .Rule based
系统复杂性
人工设计上千个模块
高精地图的成本
广铺
更新
车载硬件计算能力
各个子模块自己的网络
�
6 .Rule based
难度之大,已经远超一家公司的能力范围,需要一个协作的生态(联盟)。
�
9 .简介
lateral control
raw image
longitudinal control
�
10 .End-to-end 历史及现状
• 1988 – ALVINN, CMU
• 全连接,浅,单目
• 2005 – DAVE, Yann LeCun
• 2015 – DeepDriving, princeton
• 2016 – DAVE 2, NVIDIA
• 2016至今 – 初创公司
�
11 .End-to-end 历史及现状
• 1988 – ALVINN, CMU
• 2005 – DAVE, Yann LeCun
• 卷积,双目,off-road
• 2015 – DeepDriving, princeton
• 2016 – DAVE2, NVIDIA
• 2016至今–初创公司
�
12 .End-to-end 历史及现状
• 1988 – ALVINN, CMU
• 2005 – DAVE, Yann LeCun
• 2015 – DeepDriving, princeton
• 中间状态,由图像直接生成关键参数
• 2016 – DAVE 2, NVIDIA
• 2016至今–初创公司
�
13 .End-to-end 历史及现状
• 1988 – ALVINN, CMU
• 2005 – DAVE, Yann LeCun
• 2015 – DeepDriving, princeton
• 2016 – DAVE 2, NVIDIA
• 单目、卷积、实车、评估体系
• 评估体系、三目相机
• 2016 –初创公司
�
14 . End-to-end 历史及现状
• 1988 – ALVINN, CMU
• 2005 – DAVE, Yann LeCun
• 2015 – DeepDriving, princeton
• 2016 – DAVE 2, NVIDIA
• 2016至今–初创公司
• Comma.ai, Drive.ai , AutoX,udacity等
�
16 .End-to-end 现状总结
有点玄乎……
能干啥? 目前的主要问题?
不能干啥?
具体的,和rule based
有啥区别和联系?
�
17 .End-to-end 现状总结
Rule based End-to-end
Reactive control √ √
(边打电话)
功能
Proactive planning √ ×
(思考判断) (research 阶段)
系统工程复杂度 极高 极低
算法要求 高 高
可解释性 高 低
广铺成本 高(HD Map) 低
传感器成本 极高 低
车载计算能力 极高 低
核心问题 研发、广铺成本极高 没有足够优质的数据
�
18 .End-to-end 现状总结
Rule based End-to-end
Reactive control √ √
(边打电话)
功能
Proactive planning √ ×
(思考判断) (research 阶段)
系统工程复杂度 极高 极低
算法要求 高 高
可解释性 高 低
广铺成本 高(HD Map) 低
传感器成本 极高 低
车载计算能力 极高 低
核心问题 研发、广铺成本极高 没有足够优质的数据
关系 明显的互补关系
(对立 or 融合?) (分级对待:普通行为,Safety layer)
�
20 .数据
真实数据 模拟器数据
OpenAI, Universal
DeepMind, Lab
Udacity
TORCS
Oxford
Virtual KITTI
Comma.ai
VizDoom
…
太少, 游戏尚可,
几乎没中国国情 真实场景不可用
�
22 .原始数据
Image:
频率:8Hz
前向,HFOV:120
裁剪: 320*320*3
RTK-GPS:
频率:20Hz
精度:cm级
IMU:
频率:20Hz
�
23 .轨迹处理
数据质量影响因素:
坐标系
作业环境
系统噪音
Cleaning:
直行曲率方差
Smoothing:
连续平滑,又不能损失微调信息
二次 三次 样条曲线
最终结果:高精度的轨迹,3cm
�
24 .逆向汽车动力学
反演横向指令:
轨迹 拐弯半径 曲率 方向盘转角
eg. Ackermann Steering Model
横向指令:steering angle curvature
更普适,不受汽车自身参数影响
相互转换,业界已有成熟方案
纵向指令:加速度
IMU 厂商已经生成精准Vx,Vy
以加速度代替油门、刹车
�
25 .数据开源
采集任务:
datasets
由文件编号标明
分为图像、姿态两部分 128 256 512 ……
图像文件
K-V文件 图像
Key:utc_time
Value:320*320*3像素矩阵 姿态
姿态文件
数组,11列
utctime, Veast, Vnorth, Ct0, Ct1, Ct2, Ct3, Ct4, Ct5, Ct6, Ct7
内网说明:http://wiki.baidu.com/pages/viewpage.action?pageId=292260895
�
27 .横向模型:CNN
物理含义:
控制方向盘,横向移动
问题定义:
Image Curvature
Regression
基本方案:
CNN
指标:
准度、性能同等重要
Nvidia, DAVE 2’s network
�
28 .横向模型:CNN
CNN:基本“套路”
视频Demo:
问题:
1)只能学到“正常”驾驶
行为
“异常”情况的处理?
2)不同采集车,参数有差
异,迁移困难
如何迁移学习?
�