



















- 快召唤伙伴们来围观吧
- 微博 QQ QQ空间 贴吧
- 文档嵌入链接
- 复制
- 微信扫一扫分享
- 已成功复制到剪贴板
Tensorflow Faster RCNN 2.0
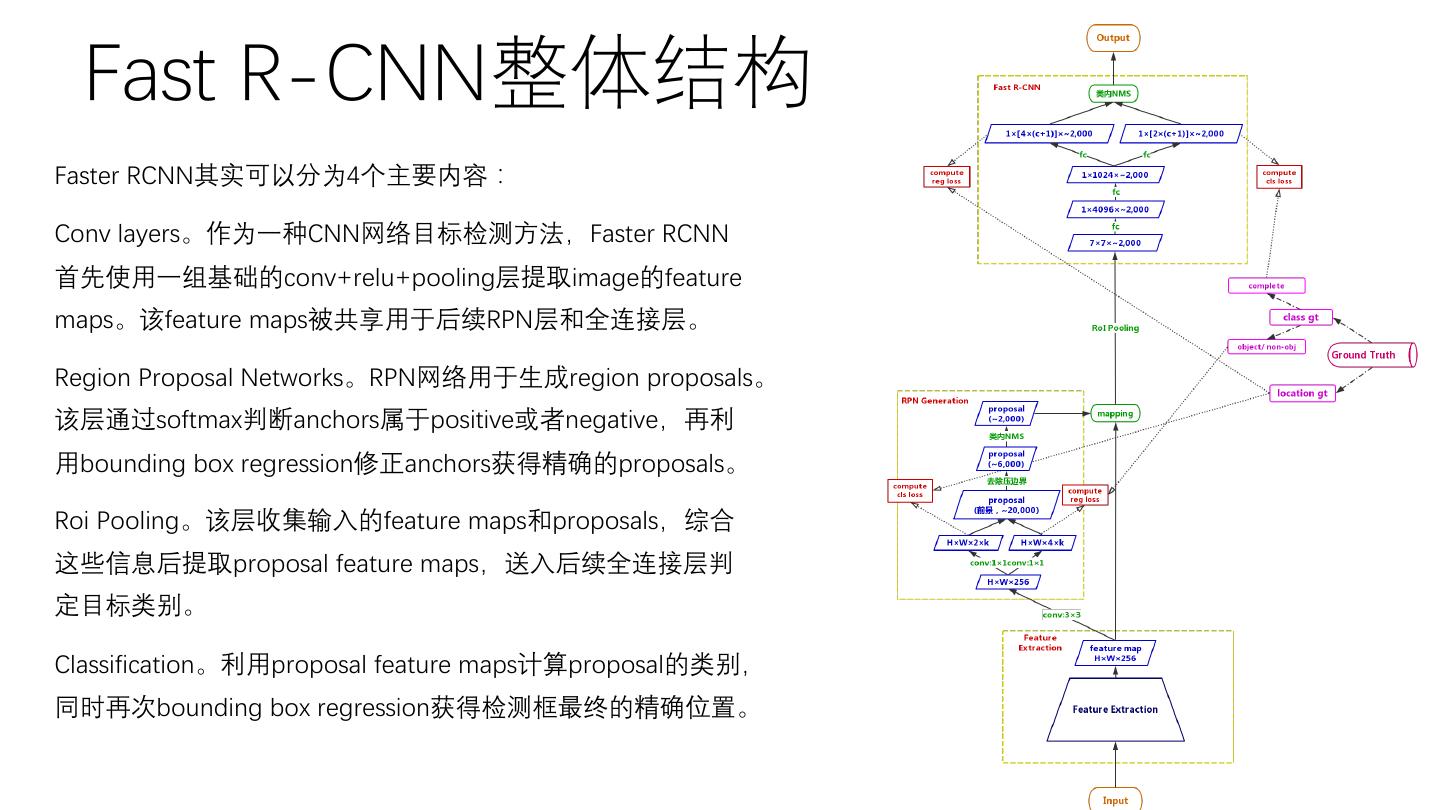
1.目标检测
2.数据集以及评价标准
3.目标检测应用
4.常用目标检测网络
5.frcn系列
6.frcn训练和预测
展开查看详情
1 .TensorFlow-FRCN 张益新 2019.11.9
2 .目录 • 1.目标检测 • 2.数据集以及评价标准 • 3.目标检测应用 • 4.常用目标检测网络 • 5.frcn系列 • 6.frcn训练和预测
3 .目标检测 解决的问题就是 物体在哪里,是什么。 难点是 物体的尺寸变化范围很大, 摆放物体的角度不定,遮挡
4 . Localization and Detection Fei-Fei Li & Andrej Karpathy & Justin Johnson 1 Feb 2016 Results from Faster R-CNN, Ren et al 2015 Fei-Fei Li & Andrej Karpathy & Justin Johnson Lecture 8 - 7 1 Feb 2016
5 . Computer Vision Tasks Classification Instance Classification Object Detection + Localization Segmentation CAT CAT CAT, DOG, DUCK CAT, DOG, DUCK Single object Multiple objects Fei-Fei Li & Andrej Karpathy & Justin 1 Feb 2016 Lecture 8 - 8 Johnson 1 Feb 2016
6 . Computer Vision Tasks Classification Instance Classification Object Detection + Localization Segmentation Fei-Fei Li & Andrej Karpathy & Justin 1 Feb 2016 Lecture 8 - 9 Johnson 1 Feb 2016
7 . Classification + Localization: Task Classification: C classes Input: Image CAT Output: Class label Evaluation metric: Accuracy Localization: Input: Image (x, y, w, h) Output: Box in the image (x, y, w, h) Evaluation metric: Intersection over Union Fei-Fei Li & Andrej Karpathy & Justin Johnson 1 Feb 2016 Classification + Localization: Do both Fei-Fei Li & Andrej Karpathy & Justin Johnson Lecture 8 - 10 1 Feb 2016
8 . Classification + Localization: ImageNet 1000 classes (same as classification) Each image has 1 class, at least one bounding box ~800 training images per class Algorithm produces 5 (class, box) guesses Example is correct if at least one one guess has correct Fei-Fei class Li & Andrej AND bounding Karpathy box at & Justin Johnson 1 Feb 2016 least 0.5 intersection over union (IoU) Krizhevsky et. al. 2012 Fei-Fei Li & Andrej Karpathy & Justin Johnson Lecture 8 - 11 1 Feb 2016
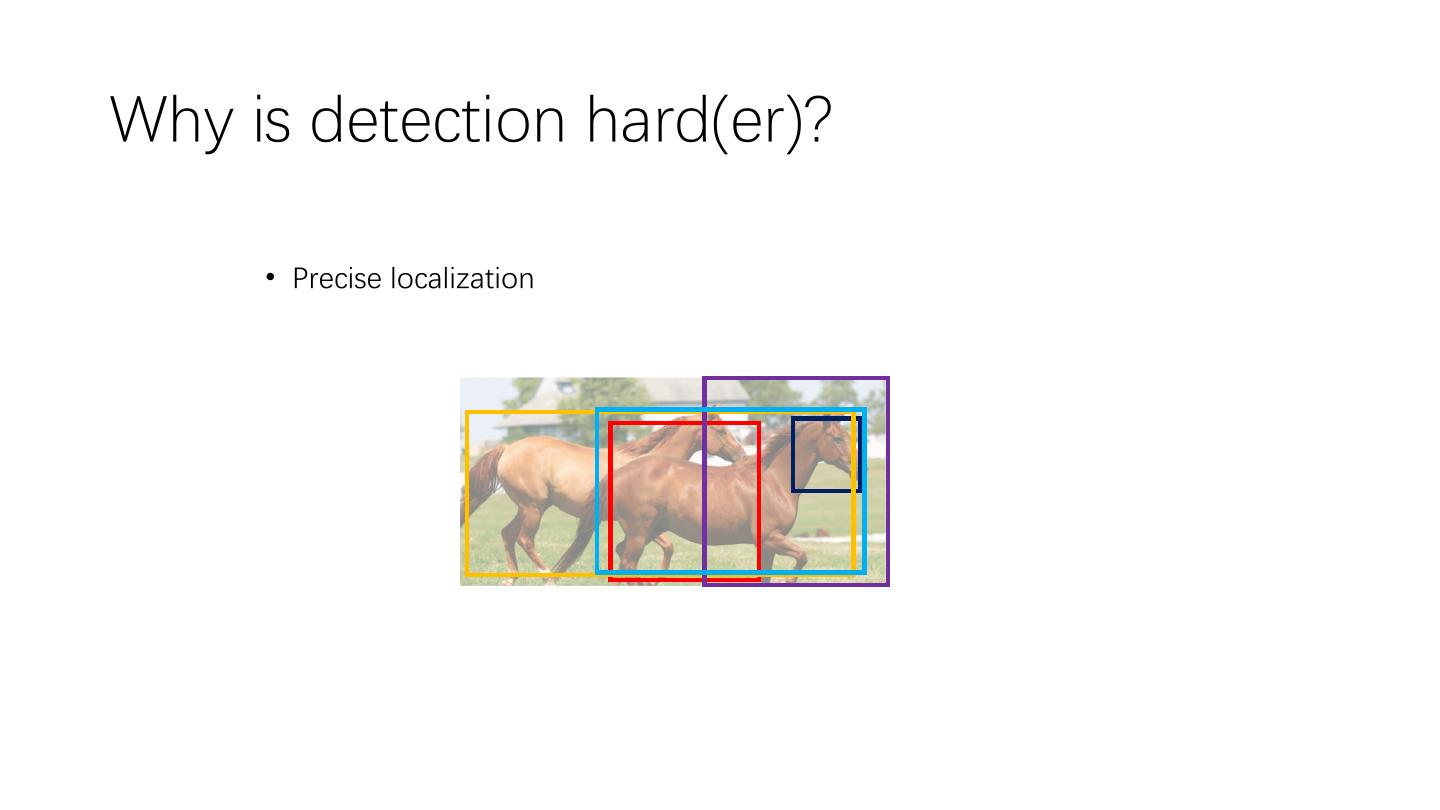
9 .Why is detection hard(er)? • Precise localization
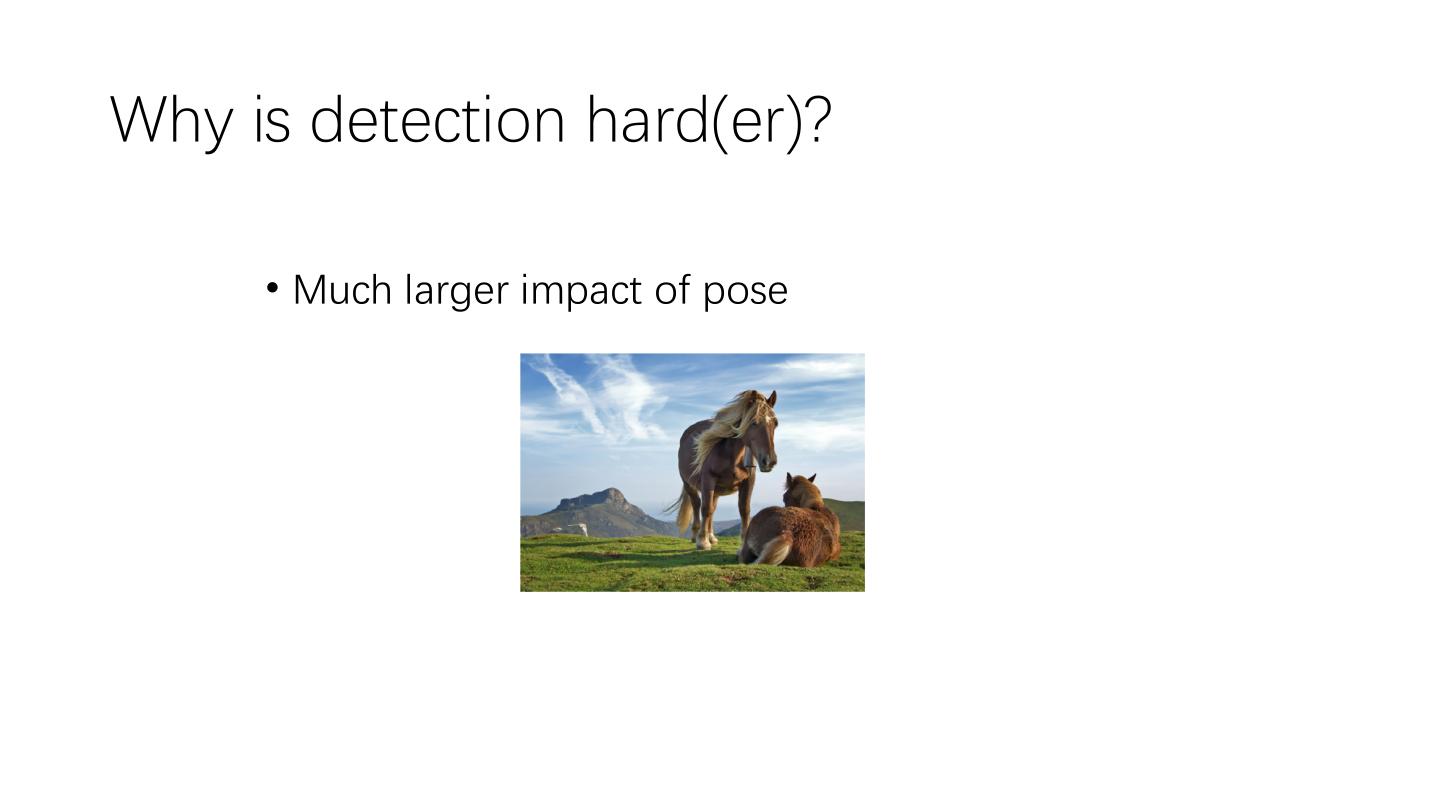
10 .Why is detection hard(er)? • Much larger impact of pose
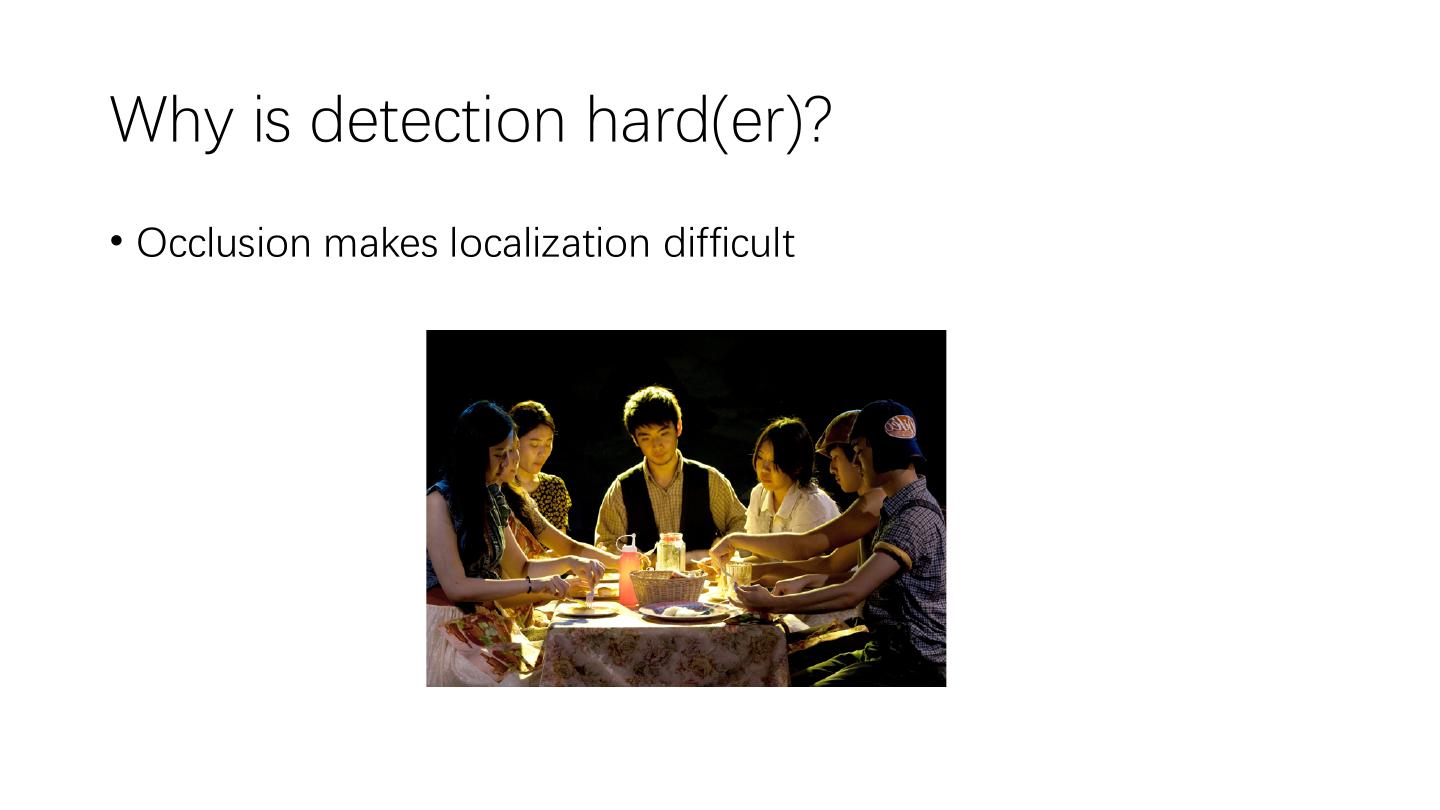
11 .Why is detection hard(er)? • Occlusion makes localization difficult
12 .Why is detection hard(er)? • Counting
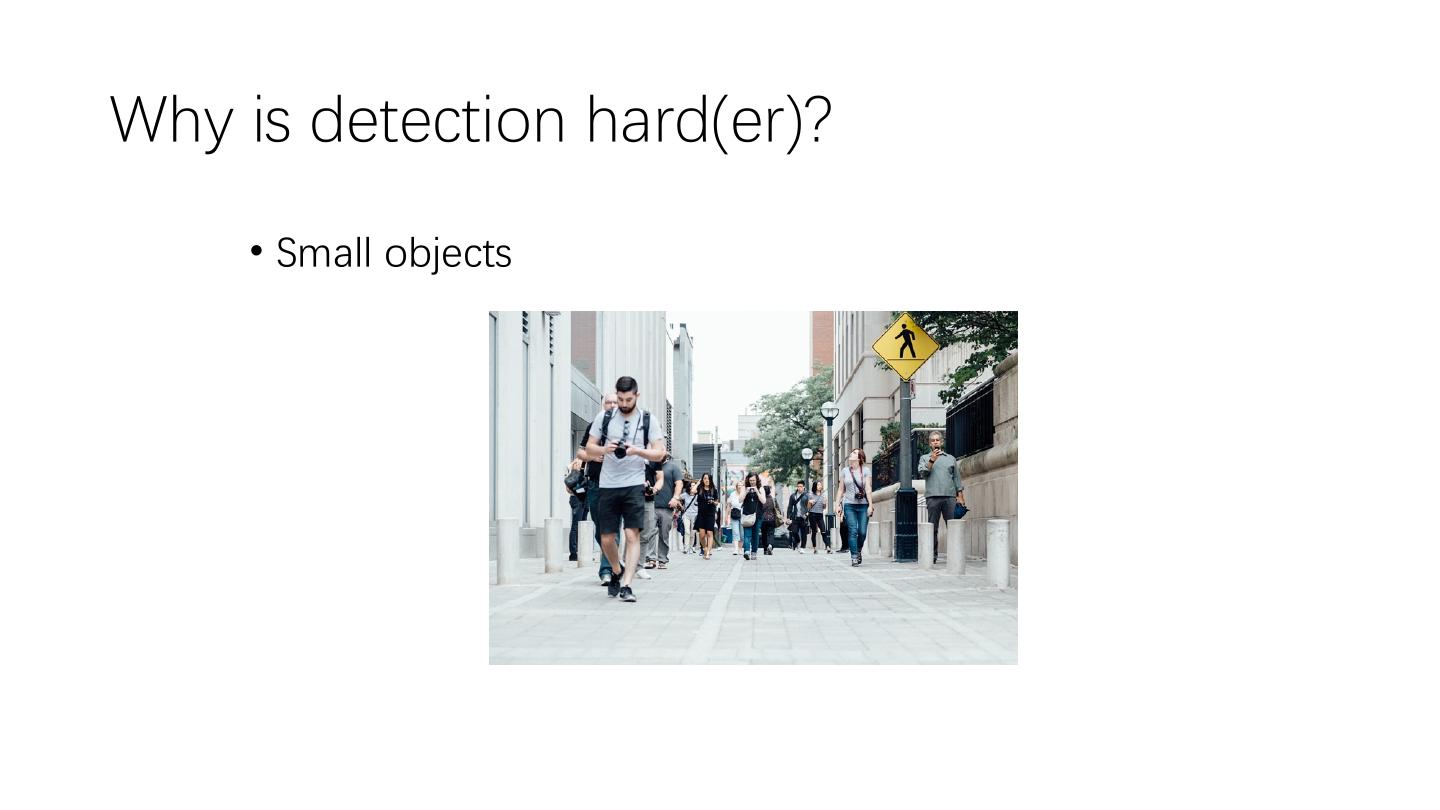
13 .Why is detection hard(er)? • Small objects
14 . Object Detection: Datasets PASCAL ImageNet VOC (2010) Detection MS-COCO (2014) (ILSVRC 2014) Number of classes 20 200 80 Number of images (train + val) ~20k ~470k ~120k Fei-Fei Li & Andrej Karpathy & Justin Johnson 1 Feb 2016 Mean objects per image 2.4 1.1 7.2
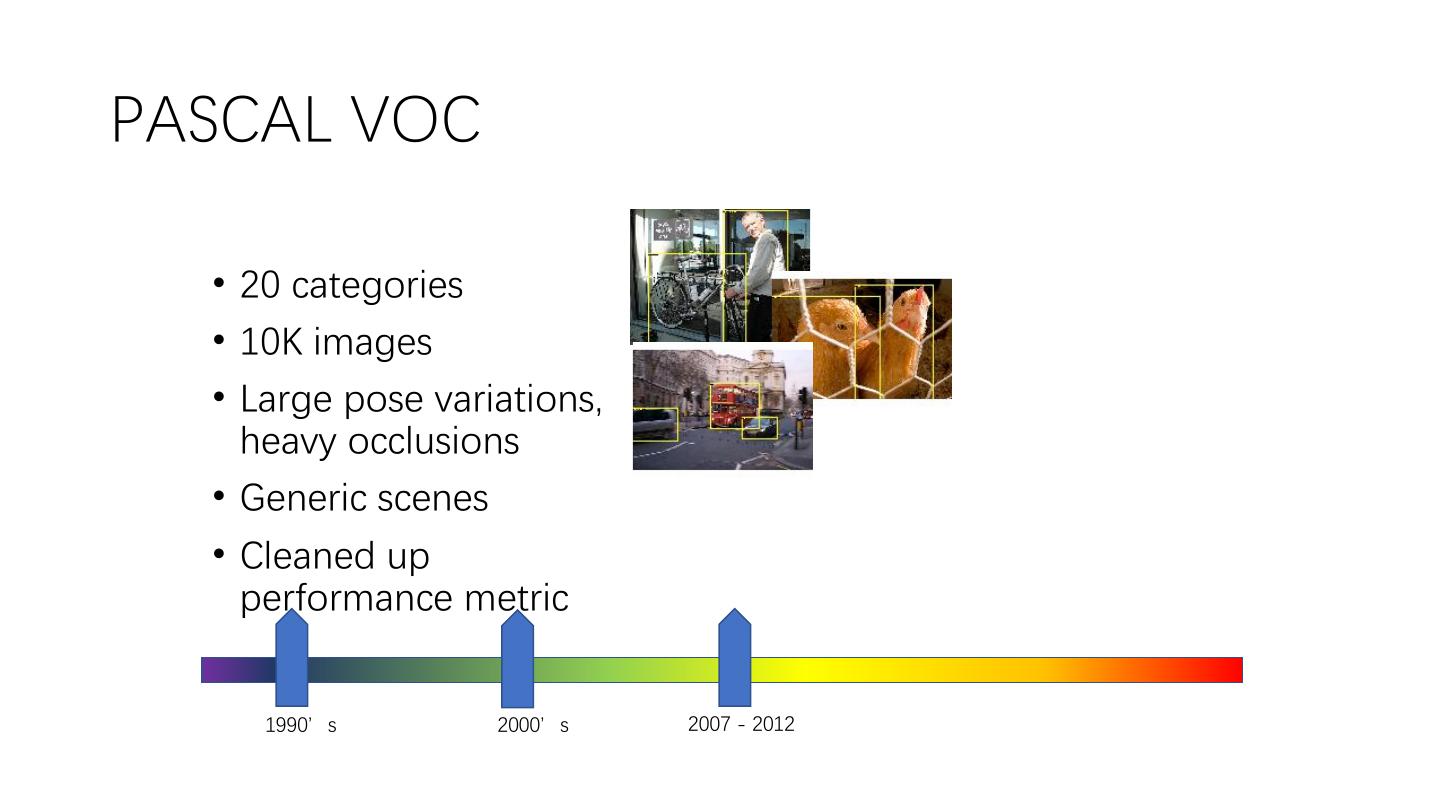
15 .PASCAL VOC • 20 categories • 10K images • Large pose variations, heavy occlusions • Generic scenes • Cleaned up performance metric 1990’s 2000’s 2007 - 2012
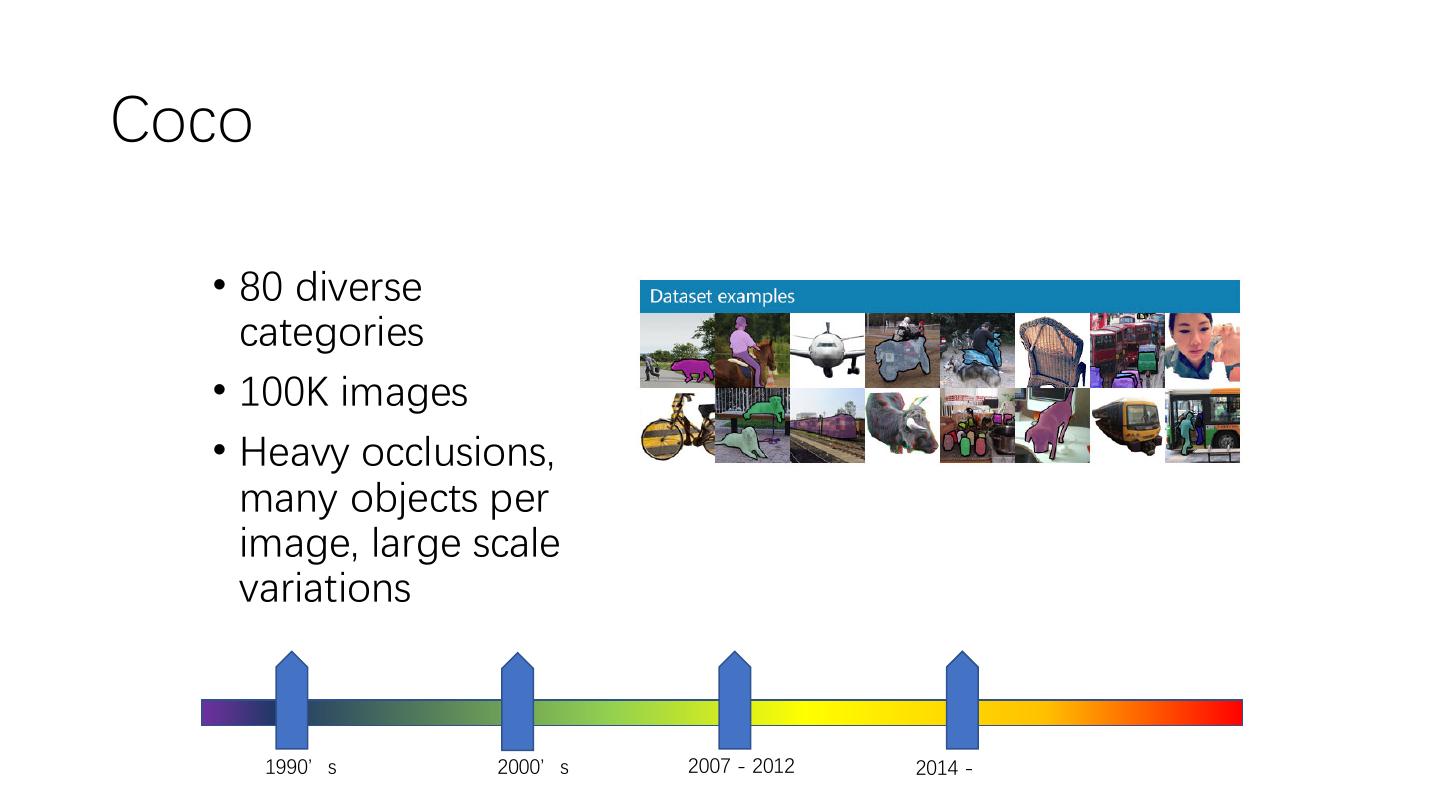
16 .Coco • 80 diverse categories • 100K images • Heavy occlusions, many objects per image, large scale variations 1990’s 2000’s 2007 - 2012 2014 -
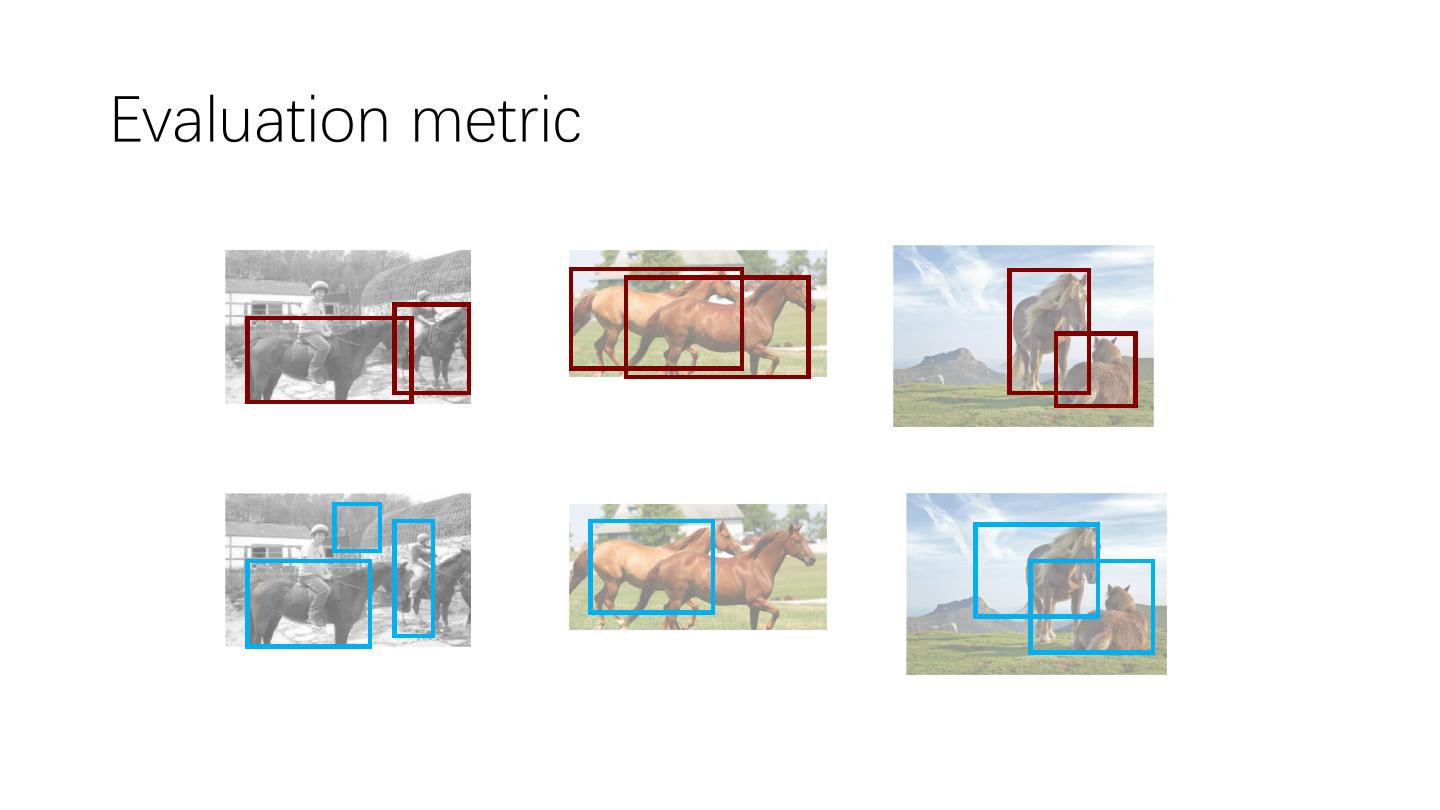
17 .Evaluation metric
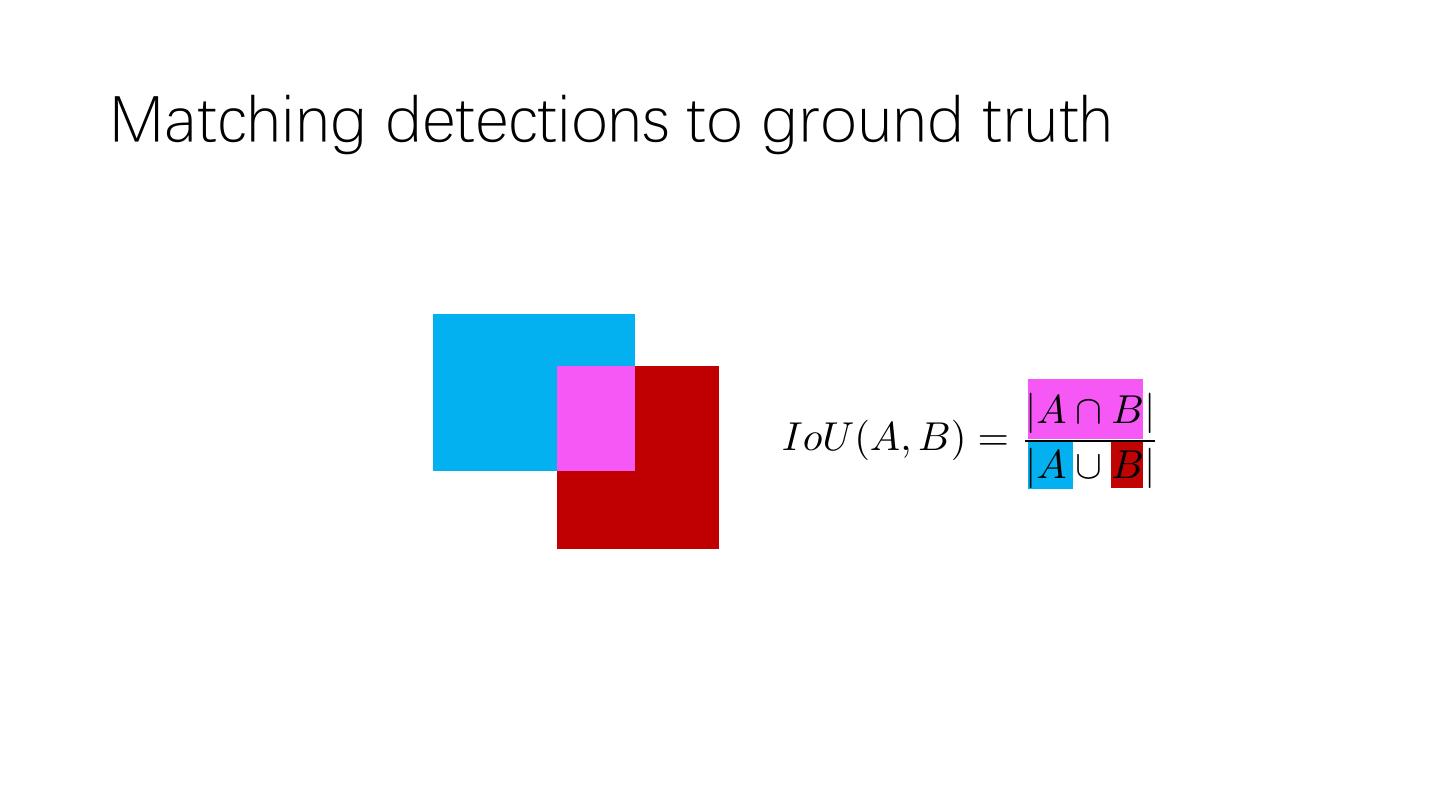
18 .Matching detections to ground truth |A \ B| IoU (A, B) = |A [ B|
19 .Matching detections to ground truth • Match detection to most similar ground truth • highest IoU • If IoU > 50%, mark as correct • If multiple detections map to same ground truth, mark only one as correct • Precision = #correct detections / total detections • Recall = #ground truth with matched detections / total ground truth
20 .Tradeoff between precision and recall • ML usually gives scores or probabilities, so threshold • Too low threshold à too many detections à low precision, high recall • Too high threshold à too few detections à high precision, low recall • Right tradeoff depends on application • Detecting cancer cells in tissue: need high recall • Detecting edible mushrooms in forest: need high precision
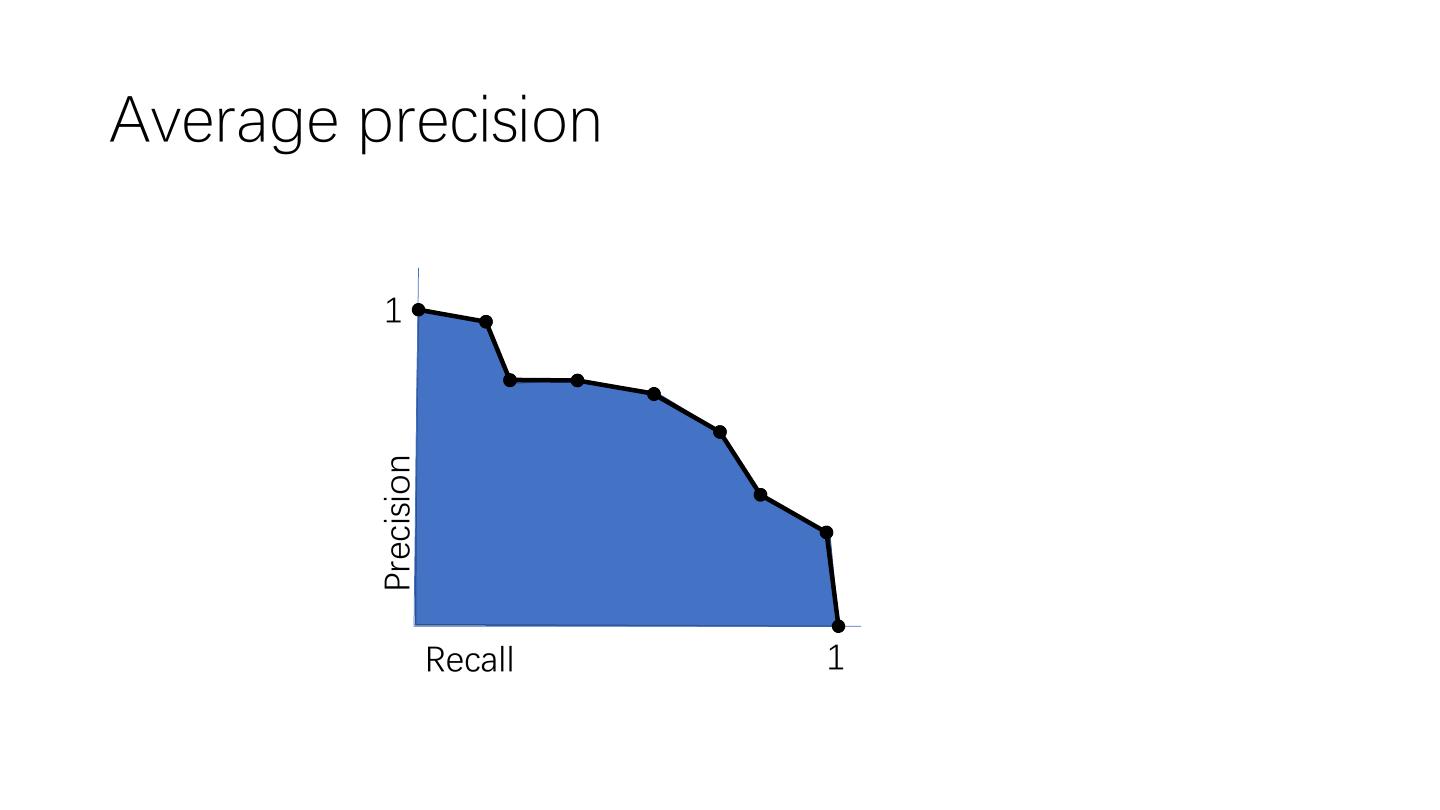
21 .Average precision 1 Precision Recall 1
22 .Average average precision • AP marks detections with overlap > 50% as correct • But may need better localization • Average AP across multiple overlap thresholds • Confusingly, still called average precision • Introduced in COCO
23 .Mean and category-wise AP • Every category evaluated independently • Typically report mean AP averaged over all categories • Confusingly called “mean Average Precision”, or “mAP”
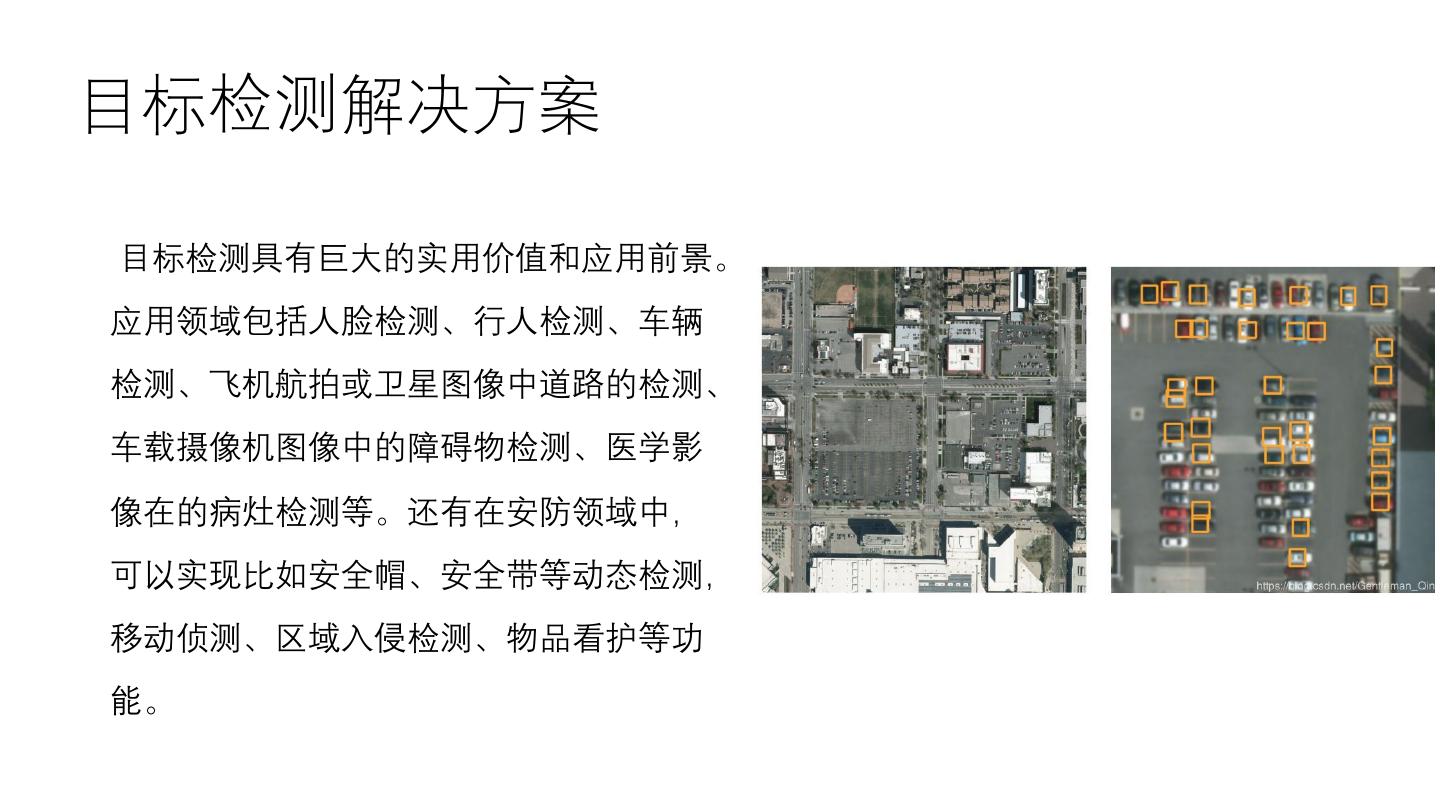
24 .目标检测解决方案 目标检测具有巨大的实用价值和应用前景。 应用领域包括人脸检测、行人检测、车辆 检测、飞机航拍或卫星图像中道路的检测、 车载摄像机图像中的障碍物检测、医学影 像在的病灶检测等。还有在安防领域中, 可以实现比如安全帽、安全带等动态检测, 移动侦测、区域入侵检测、物品看护等功 能。
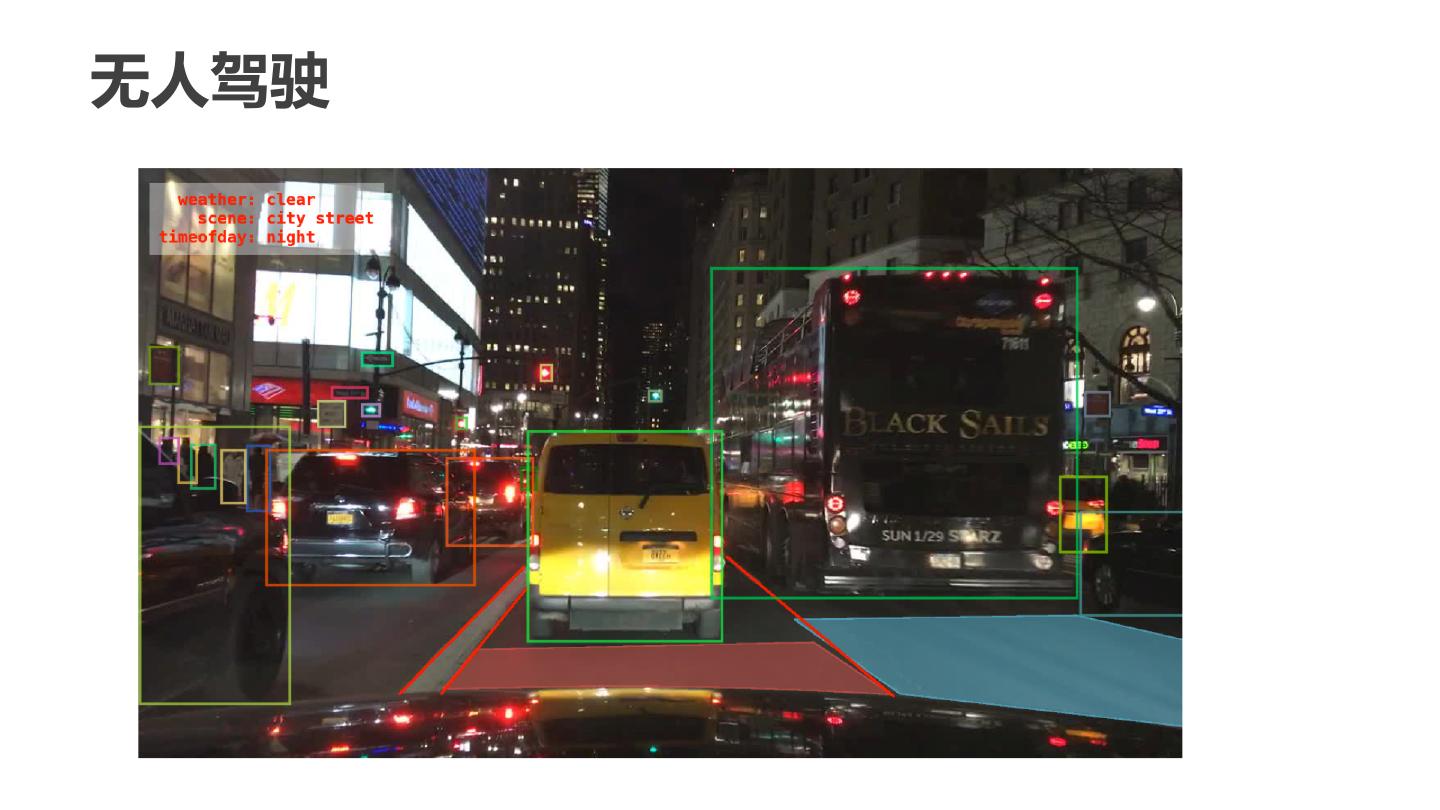
25 .无人驾驶
26 .目标检测方法 Faster R-CNN ssd yolo fpn maskrcnn
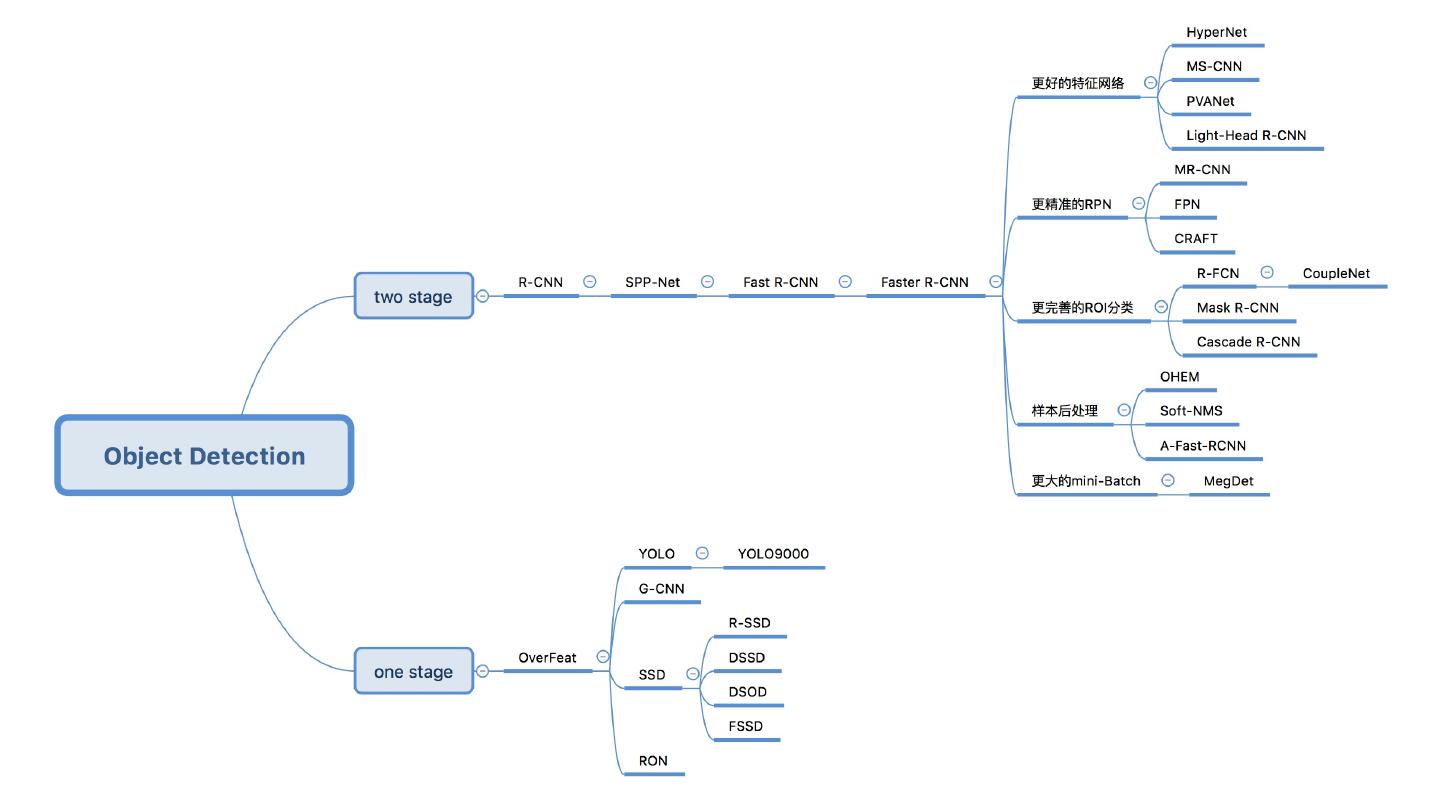
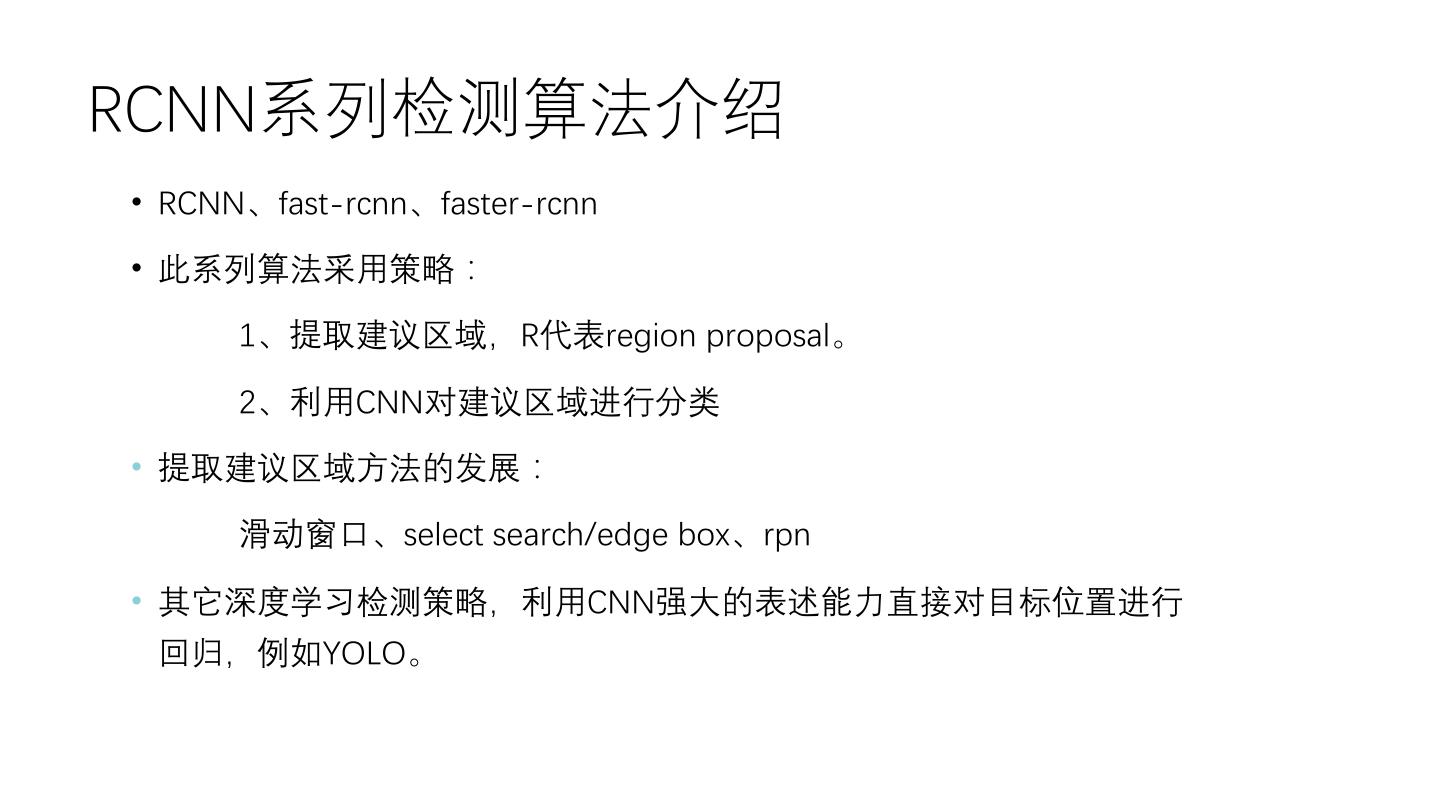
27 .目标检测算法分类 ● 基于深度学习的目标检测算法主要分为两类: ● 1.Two stage目标检测算法 ○ 先进行区域生成(region proposal,RP)(一个有可能包含待检物体的预选框),再通过卷积神经网络进行样本分类。 ○ 任务:特征提取—>生成RP—>分类/定位回归。 ○ 常见的two stage目标检测算法有:R-CNN、SPP-Net、Fast R-CNN、Faster R-CNN和R-FCN等。 ● 2.One stage目标检测算法 ○ 不用RP,直接在网络中提取特征来预测物体分类和位置。 ○ 任务:特征提取—>分类/定位回归。 ○ 常见的one stage目标检测算法有:OverFeat、YOLOv1、YOLOv2、YOLOv3、SSD和RetinaNet等。
28 .
29 .目标检测网络
3秒后跳转登录页面
去登陆

