





























- 快召唤伙伴们来围观吧
- 微博 QQ QQ空间 贴吧
- 文档嵌入链接
- 复制
- 微信扫一扫分享
- 已成功复制到剪贴板
Deep Neural Networks (DNN)
Choices of optimization methods in Keras. SGD: Stochastic gradient descent; Adagrad: Adaptive learning rate; RMSprop: Similar to Adagrad; Adam: Similar to ...
展开查看详情
1 .Deep Neural Networks (DN N) J.-S. Roger Jang ( 張智星 ) jang@mirlab.org http://mirlab.org/jang MIR Lab, CSIE Dept. National Taiwan University 18年9月2 日
2 .Concept of Modeling Modeling Given desired i/o pairs (training set) of the form (x1, ..., x n; y), construct a model to match the i/o pairs x1 Unknown target system y ... xn Model y* Two steps in modeling Structure identification: input selection, model complexit y Parameter identification: optimal parameters 2/33
3 .Neural Networks Supervised Learning Multilayerperceptrons Radial basis function networks Modular neural networks LVQ (learning vector quantization) Unsupervised Learning Competitive learning networks Kohonen self-organizing networks ART (adaptive resonant theory) Others Hopfield networks 3/33
4 .Single-layer Perceptrons Proposed by Widrow & Hoff in 1960 AKA ADALINE (Adaptive Linear Neuron) or single-laye r perceptron Training data x1 x2 (voice freq.) w1 w0 y w2 x2 f x; w sgn w0 w1 x1 w2 x2 1 if female 1 if male Quiz! w0 y f x; w w1 x1 y f x; w x1 (hair length) w x y f x; w perceptronDemo.m 4/33 2 2
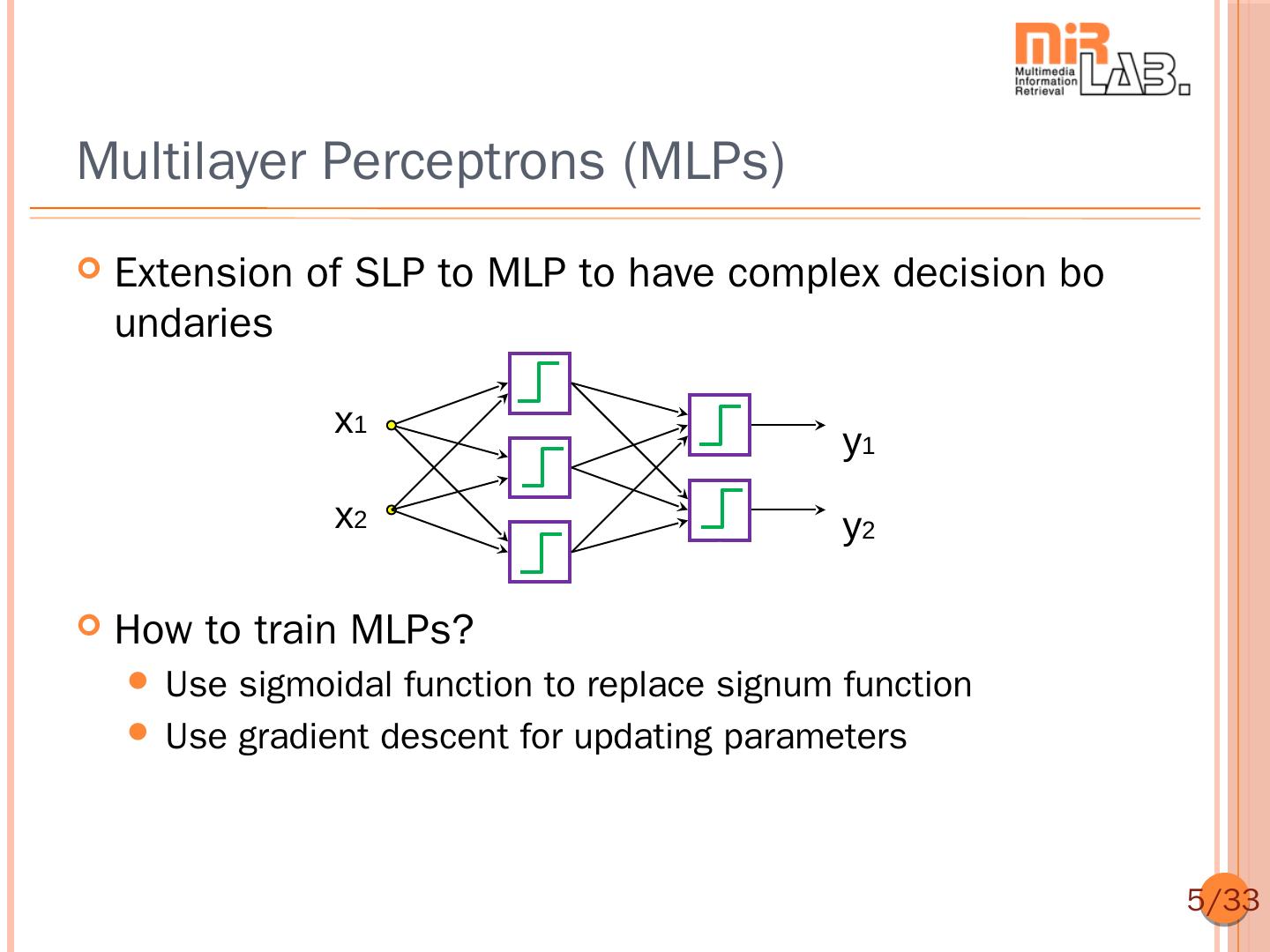
5 .Multilayer Perceptrons (MLPs) Extension of SLP to MLP to have complex decision bo undaries x1 y1 x2 y2 How to train MLPs? Use sigmoidal function to replace signum function Use gradient descent for updating parameters 5/33
6 .Continuous Activation Functions In order to use gradient descent, we need to replace the signum function by its continuous versions Sigmoid Hyper-tangent Identity y = 1/(1+exp(-x)) y = tanh(x/2) y=x 6/33
7 .Activation Functions 1 Sigmoid : x 1 e x 1 e 2 x Tanh : x 1 e 2 x x Softsign : x 1 x x if x 0 ReLU : x 0 otherwise x if x 0 Leaky ReLU : x x otherwise Softplus : x ln 1 e x 7/33
8 .Classical MLPs Typical 2-layer MLPs: x1 y1 x2 y2 Learning rule Gradient descent (Backpropagation) Conjugate gradient method All optim. methods using first derivative Derivative-free optim. 8/33
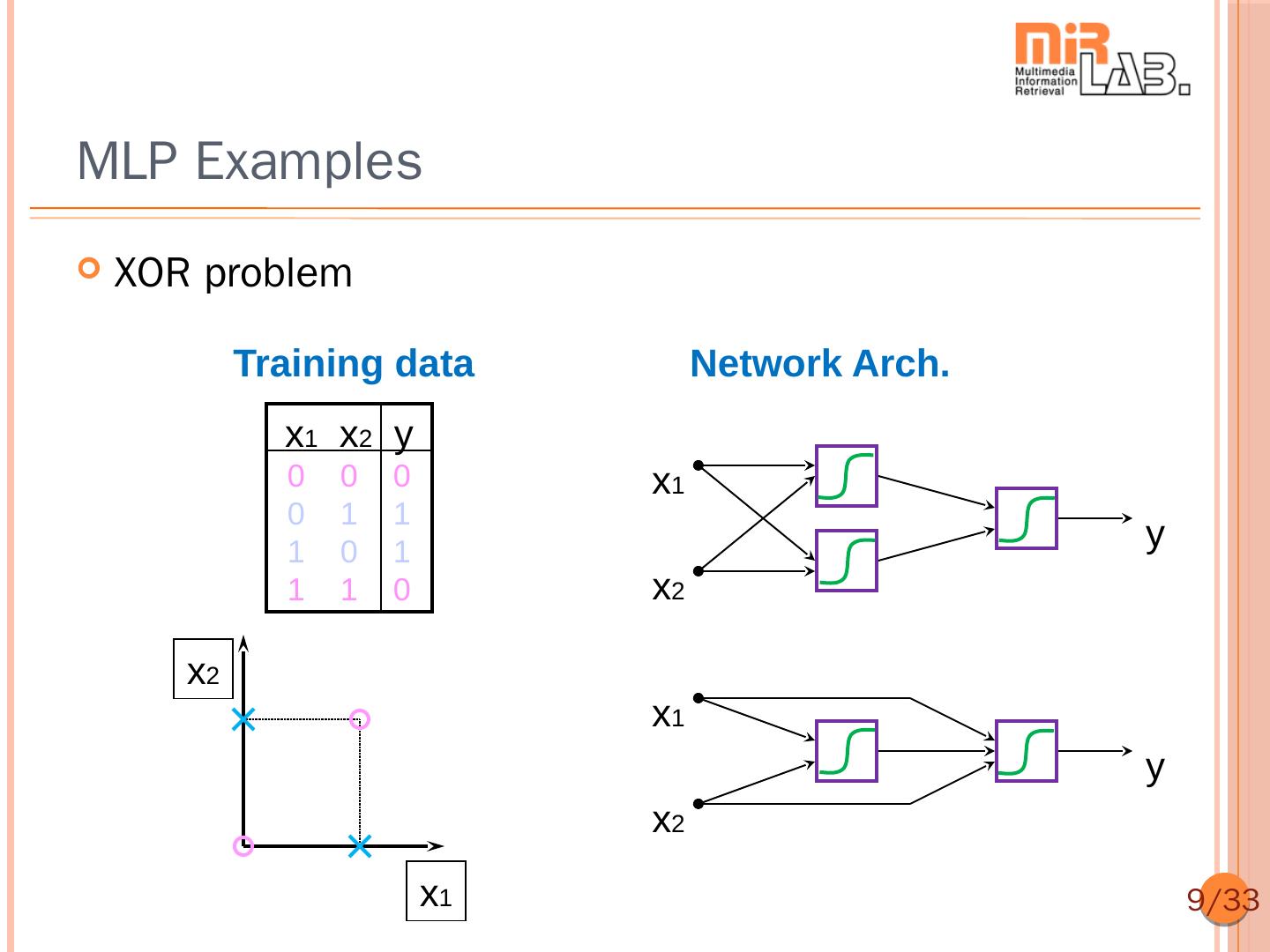
9 .MLP Examples XOR problem Training data Network Arch. x1 x2 y 0 0 0 x1 0 1 1 1 0 1 y 1 1 0 x2 x2 x1 y x2 x1 9/33
10 .MLP Decision Boundaries Single-layer: Half planes Exclusive-OR Meshed Most general problem regions regions A B A B B A 10 /33
11 .MLP Decision Boundaries Two-layer: Convex regions Exclusive-OR Meshed Most general problem regions regions A B A B B A 11 /33
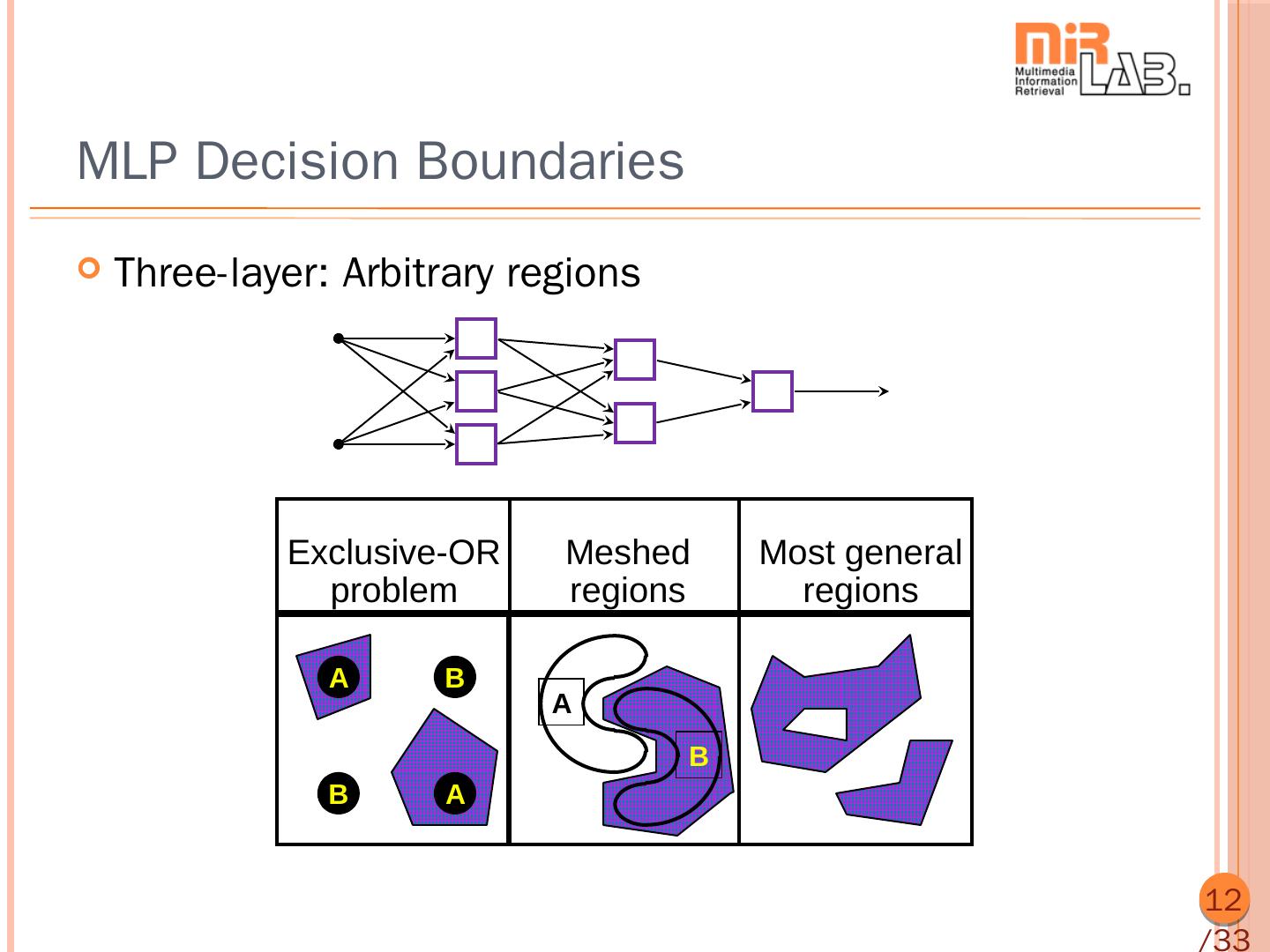
12 .MLP Decision Boundaries Three-layer: Arbitrary regions Exclusive-OR Meshed Most general problem regions regions A B A B B A 12 /33
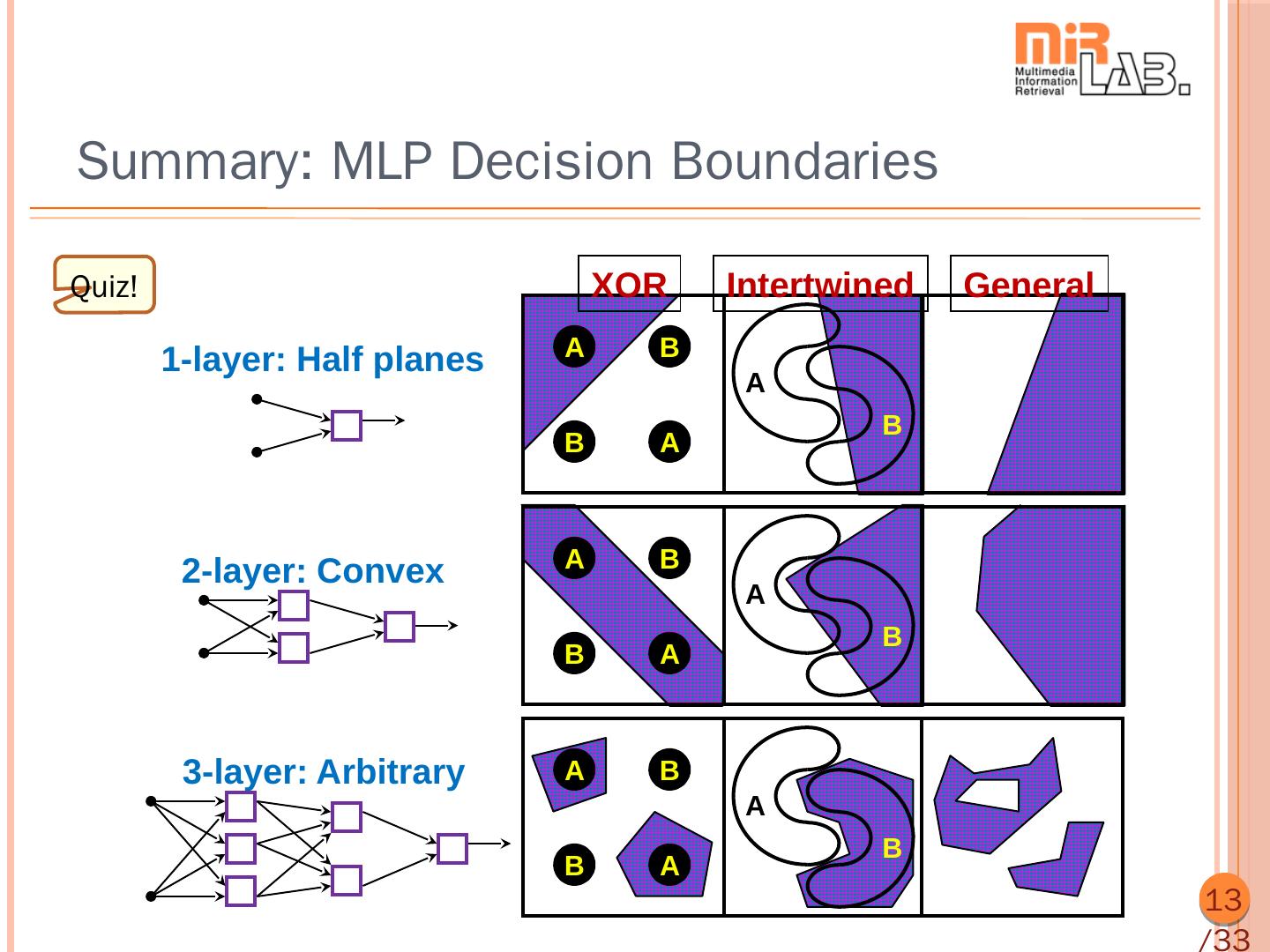
13 .Summary: MLP Decision Boundaries Quiz! XOR Intertwined General A B 1-layer: Half planes A B B A 2-layer: Convex A B A B B A 3-layer: Arbitrary A B A B B A 13 /33
14 .MLP Configurations 14 /33
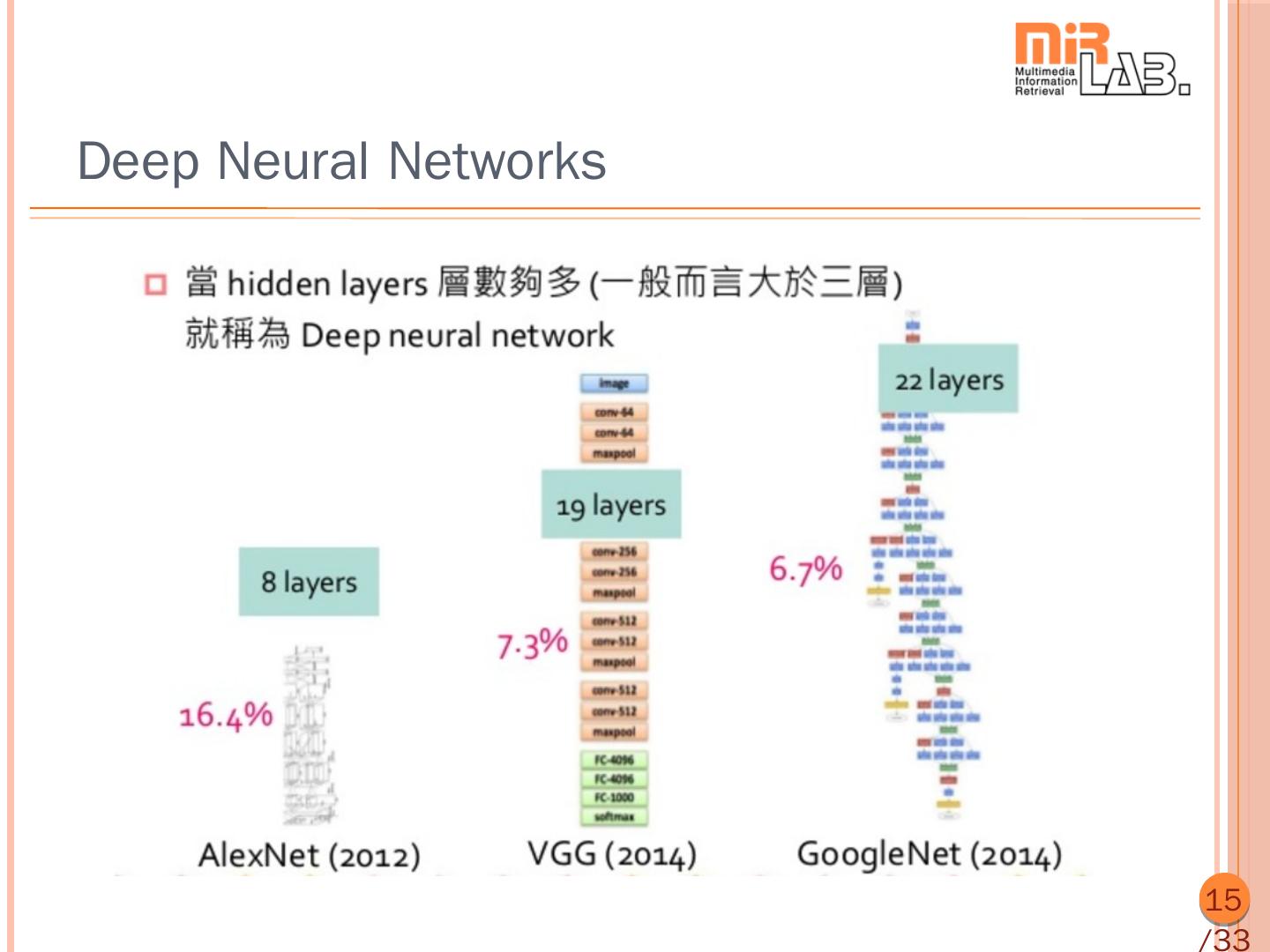
15 .Deep Neural Networks 15 /33
16 .Training an MLP Methods for training MLP Gradientdescent Gauss-Newton method Levenberg-Marquart method Backpropagation: A systematic way to compute grad ients, starting from the NN’s output Training set : x i , yi | i 1,2, , n Model : y f x, θ n Sum of squared error : E (θ) yi f x i , θ 2 i 1 n E (θ) 2 yi f x i , θ θ f x i , θ i 1 16 /33
17 .Simple Derivatives Review of chain rule dy df x y df x y f x dx dx x dx Network representation x f(.) y 17 /33
18 .Chain Rule for Composite Functions Review of chain rule y f x dz dz dy dg y df x z g f x z g y dx dy dx dy dx Network representation y x f(.) g(.) z 18 /33
19 .Chain Rule for Network Representation Review of chain rule y f x du u dy u dz z g x u h f x , g x u h y , z dx y dx z dx Network representation y f(.) h(. , x .) u g(, ) z 19 /33
20 .Backpropagation in Adaptive Networks (1/ 3) Backpropagation A way to compute gradient from output toward input Adaptive network Node 1 : u x ey Node 2 : v ln x y u x 1 Node 3 : o u 2 v 3 / Network input : x, y 3 o Network output : o y 2 Network parameters : , , v Overall function : o f ( x,y ; α,β,γ ) output inputs parameters 20 /33
21 .Backpropagation in Adaptive Networks (2/ 3) x 1 u 3 o y 2 v Node 1 : u x ey Node 2 : v ln x y Node 3 : o u 2 v 3 / 21 /33
22 . Backpropagation in Adaptive Networks (3/ 3) x 1 P 3 u 5 o y 2 q 4 v Node 1 : p x ey Node 2 : q ln x y Node 3 : u p q / 2 3 Node 4 : v pq Node 5 : o u ln v v ln u You don’t need to ! 22 /33
23 .Summary of Backpropagation General formula for backpropagation, assuming “o” is the network’s final output “” is a parameter in node 1 o o x Backpropagation! y1 x o o y o y2 o y3 1 x x y1 x y2 x y3 x y2 o o o 1 , , : Derivatives in the next layer y1 y2 y3 y3 y1 y2 y3 , , : Weights of backpropagation x x x 23 /33
24 . Backpropagation in NN (1/2) x1 1 y1 1 o x2 2 y2 1 1 y x x 1 e (11 x1 12 x2 1 ) 11 1 12 2 1 1 y2 21 x1 22 x2 2 ( 21 x1 22 x2 2 ) 1 e 1 o y y 1 e ( 11 y1 12 y2 1 ) 11 1 12 2 1 25 /33
25 . Backpropagation in NN (2/2) x1 1 y1 1 z1 x2 2 1 o y2 2 z2 x3 3 y3 1 y i x x x 1 e ( i1 x1 i 2 x2 i 3 x3 i ) i1 1 i2 2 i3 3 i 1 zi i1 y1 i 2 y2 i 3 y3 i 1 e ( i1 y1 i 2 y2 i 3 y3 i ) 1 o z z 26 1 e ( 11 z1 12 z2 1 ) 11 1 12 2 1 /33
26 .Use of Mini-batch in Gradient Descent Goal: To speed up the training with large dataset A process of going through all data Approach: Update by mini-batch instead of epoch If dataset size is 1000 Batch size = 10 100 updates in an epoch mini bat ch Batch size = 100 10 updates in an epoch mini bat ch Update by epoch Batch size=1000 Update 1 update in by mini-batch an epoch full batch Slower Faster update! update! 27 /33
27 .Use of Momentum Term in Gradient Desc ent Purpose of using momentum term Avoidoscillations in gradient descent (banana function!) Escape from local minima (???) Formula Original: θ E θ Contours of banana function Withmomentum term: θ E θ θ prev Momentum term 28 /33
28 .Learning Rate Selection 29 /33
29 .Optimizer in Keras Choices of optimization methods in Keras SGD: Stochastic gradient descent Adagrad: Adaptive learning rate RMSprop: Similar to Adagrad Adam: Similar to RMSprop + momentum Nadam: Adam + Nesterov momentum 30 /33
3秒后跳转登录页面
去登陆

